基于永磁同步直线电机的城轨门系统研究
2017-09-28朱伟朱浩渊
朱伟,朱浩渊
(南京康尼电子科技有限公司,江苏南京210013)
基于永磁同步直线电机的城轨门系统研究
朱伟,朱浩渊
(南京康尼电子科技有限公司,江苏南京210013)
永磁同步直线电机作为新型城轨门系统的驱动装置,其性能直接影响门系统的运行效果。理论分析了永磁同步电机矢量控制(SVPWM)原理,在以TI公司DSP为核心的硬件平台上实现了转子磁场定位控制算法。同时分析了电子门控器(EDCU)设计和门系统控制方案的设计以及开关门曲线设计,并经实验加以验证。
永磁同步直线电机;空间矢量脉宽调制;开关门曲线
随着中国经济的快速发展、城镇化进程的不断加快,轨道交通的需求也处于一段高速增长的时期。车门系统作为城轨车辆的重要组成部分,如何能实现高效和安全的驱动成为了当今研究的一个重点。实现城轨门系统在水平方向上的运动,目前常见的方法是通过旋转电机加丝杆的方式实现。永磁同步直线电机(PMSLM)直接产生直线运动,没有中间转换环节,动力是在气隙磁场中直接产生的,可获得比传统驱动机构更高的定位精度和快速响应速度。目前,永磁同步直线电机一般采用矢量控制策略(SVPWM),使得电流谐波含量减少,转矩脉动减小[1]。本文阐述了以TI公司电机控制专用DSP芯片作为控制核心的电子门控器,对永磁同步直线电机进行矢量控制,从而实现对城轨门系统行程和速度的精确控制。
1 门系统的整体设计
常见的旋转电机门系统的整体结构如图1所示,门扇连接在螺母上,通过丝杆将电机和螺母连接。当电机旋转时,丝杆和螺母的相对运动即可控制车门的开门和关门动作。此方式仅使用一台电机即可驱动一套双开门系统,成本较低。两扇门的运动使用同一根丝杆传动,开关门同步性好。此外,为了保证电机输出足够扭矩驱动门扇,需要利用减速器来提升输出扭矩。
基于永磁同步直线电机的城轨门系统结构参见图2,利用永磁同步直线电机对门扇进行直接驱动和控制。直线电机门系统直接使用永磁同步直线电机驱动门扇,极大地减少了门系统运动控制机构的复杂程度。由于直线电机不需要减速器来达到输出扭矩的要求,同时也没有丝杆和螺母这样的传动装置,系统的效率有了很大的提升,门系统的效率可以提升10%-20%;取消了减速器,门扇控制的响应速度也有较大提高;由于直线电机直接驱动门扇,电机本身的控制精度即可表示门系统的控制精度。
这样的系统由于部件的减少,节约了空间。门系统安装在轨道交通车辆的侧方,为了保证乘客乘车的安全,除了门扇部分外漏,其他部分包括驱动机构需要安装在车顶隔层。车顶隔层同时还集成了空调、照明系统、智能指示系统等。直线电机门系统由于传动部件的减少,节省了门系统的安装空间,对整体车辆空间布置也有很大的帮助。
由于两扇门的运动方向不同,每扇门需要一台直线电机对其进行控制。直线电机门系统中将双开门的左右侧分位相对独立的两套门系统,两个控制器,两台直线电机,两套锁闭系统,以及相应的到位开关。这样可以使得左右侧门系统相互独立,在某侧门丧失功能后仍可以通过另一侧门扇实现开关门的功能,提高车门的可靠性。后期可以通过开发控制双电机的门控器来实现两侧门扇的统一控制,来降低成本以及减少各个开关的布置。
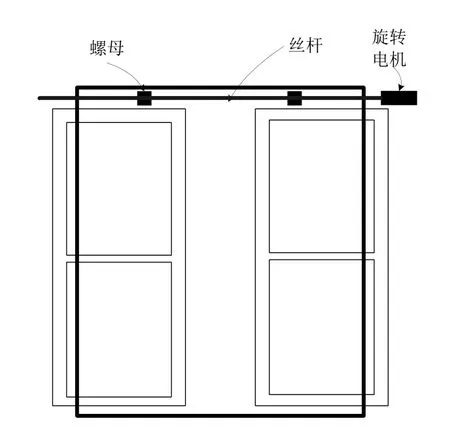
图1 旋转电机驱动门结构简图
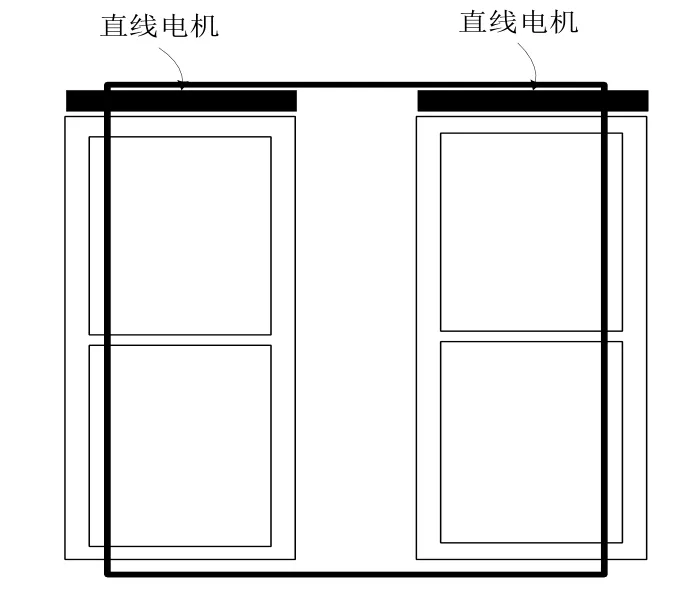
图2 直线电机驱动门结构简图
2 永磁同步直线电机矢量控制的基本原理
永磁同步直线电机可以看作是旋转永磁同步电机在结构方面的一种演变,如图3所示,它可以看成是将一台旋转电机沿径向剖开,然后将电机的圆周展成平面,因而其工作原理也与旋转永磁同步电机相似。在直线电机中,由运动相对性原理,动子的直线运动,可理解为定子相对于动子作反方向直线运动,因此“旋转坐标系”则固定在定子上,和定子一起相对于动子作直线运动。于是让d轴位于次级永磁体N极轴线上,q轴则超前d轴90°,也就是极距的1/4。
永磁同步直线电机矢量控制的控制框图如图4所示,永磁同步直线电机矢量控制由速度环与电流环双闭环构成。速度环可以增强系统抗负载扰动的能力,从而实现对门扇速度的精确控制;电流环作为内环,主要由PI控制器、PARK变换、PARK反变换、CLARKE变换以及SVPWM构成,由于励磁电流分量id在永磁同步直线电机的推力控制中起的作用不大,一般采用id=0的控制策略来简化电流环,实现解耦控制[2]。
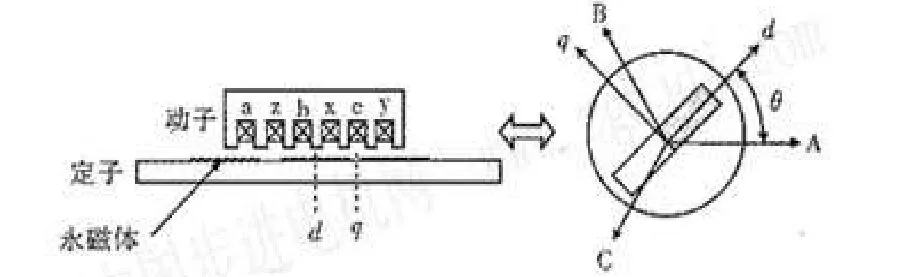
图3 永磁同步直线电机结构简图
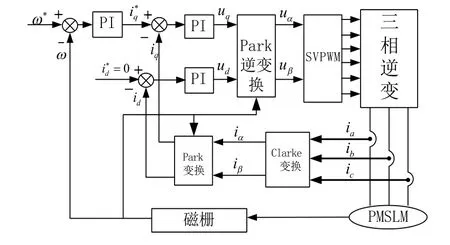
图4 PMSLM双闭环控制框图
3 永磁同步直线电机门控器设计
根据永磁同步直线电机的矢量控制原理,以及门系统的控制应用需求,设计了新型的电子门控器(EDCU)。主要采用TI公司电机电机控制专用DSP芯片作为主控制器。其片内集成了PWM,ADC,QEP,GPIO等电机控制基本外设,另外还有丰富的通信外设,如CAN,SCI,SPI等,功率驱动部分采用高性能IPM模块。电流采样使用专用电流采样芯片,为电流环提供了高性能的电流采样。门控器系统框图如图5所示。
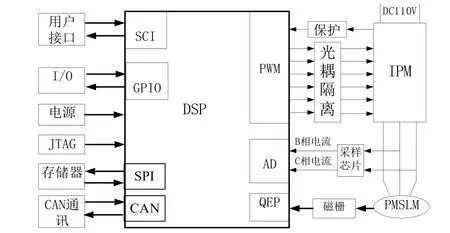
图5 EDCU系统框图
永磁同步直线电机采用分辨率为15微米的磁栅与霍尔传感器作为位置反馈元件。霍尔信号用于确定矢量控制时d轴所处的矢量扇区。而磁栅的A,B信号用于精确位置计算,磁栅Z信号可以用作初始定位的角度校正。需要特别注意磁栅A,B,Z信号的抗干扰处理,否则会导致电机运行异常以及初始定位失败。因此线缆必须是带屏蔽的线缆,并可靠接地。另外,对于磁栅尺读头的安装位置也要求有较高的精度。
4 永磁同步直线电机门系统电控设计
永磁同步直线电机的动子安装在门扇上,而定子则安装在携门架上。两个门扇各安装一台直线电机和一台门控器。这样的配置方式,使得每个门扇可以单独控制开/关,即使在某个门扇发生故障的时候,另外一扇门也可以实现开/关,使得门系统开关门更加可靠。
4.1 门控系统运行功能
台架电控系统设计了自动和手动两种运行模式。在手动模式下,两台门控器将同时收到开/关门列车线命令,被激活的车门会在开/关门列车线的命令下执行开门或关门;在自动模式下,左侧门作为主门,右门则作为从门,当主门收到从门关锁到位信号后将发出允许从门开门命令,两扇门将同时开启,在开到位后延时关闭。
4.2 门控系统防挤压功能
4.2.1 关门防挤压功能
通过门位置传感器的检测,将门的运动分成距离段,如果在给定的时间内门未通过这些距离段,障碍检测被激活。如果障碍检测被激活,将会施加一个持续0.5s的最大关门力(≤150N)。之后门自动打开150mm(打开距离可调)左右,停止1秒(1-8s可调)后,再次关闭,以便清除障碍物。
这个循环将重复3次,且在3次连续关门顺序中如果障碍检测都被激活,门将运动到开门终点位置并停留在这一位置,将由内侧车门指示灯指示以引导司机注意这个故障。
4.2.2 开门防挤压功能
在开门过程中有障碍检测功能,障碍检测可被激活3次。开门时若有障碍会使开门循环停止1秒,在3次开门动作之后门将会停在此位置并且EDCU会认为此位置是最大可达开门位置,此时任何关门指令都可将门关闭。
4.3 门控系统锁闭功能
直线电机台架使用电磁锁,当关门时,安装在门扇上的锁舌会进入电磁锁闭机构,此时可以完成锁闭,同时触发锁到位开关信号。当门控器接收到开门命令时,会通过输出口向电磁锁通入直流电0.5s(具体时间可调),此时电磁铁得则会解锁,门扇开始执行开门动作。
4.4 门控系统开关门曲线设置
门系统执行开/关门动作是按照预先设定好的速度曲线进行运行的。软件根据电机参数以及初始速度值,最高速度值,加速度值,减速度值,运行总距离,运行总时间等运行参数,计算出每个速度给定周期合理的速度增量,这样门控器即可按照设定的运动曲线运行。
5 实验结果分析
本文使用青岛产某永磁同步直线电机,康尼电子自主研发的门控器在台架上进行实验。电机额定推力70N,额定电流2.4A,电阻5.3Ω,电感15.6mH,极距32mm,动子重量1.7Kg,有效行程710mm。电流环采用PI调节器,比例系数kp=2.6,积分时间TI=0.002s。电流反馈波形如图6所示,电流跟踪给定较好。一般,电流调节器参数调节好后基本不用再调整。速度环同样采用PI调节器,比例系数kp=260,积分时间常数TI=100ms。关门速度给定与反馈波形见图7,实际速度能够较好地跟随关门曲线设置。由于门扇相对于直线电机动子属于大惯性环节,调节器比例系数需足够大,而积分时间也相对较长。在运行过程中发现低速抖动比较明显,这是由于电机全行程气隙磁密度分布不均匀,所以对低速运行的影响比较大,低速时存在较大运行波动[3]。如果要改善这种状况,必须进一步提高直线电机生产的工艺水平。
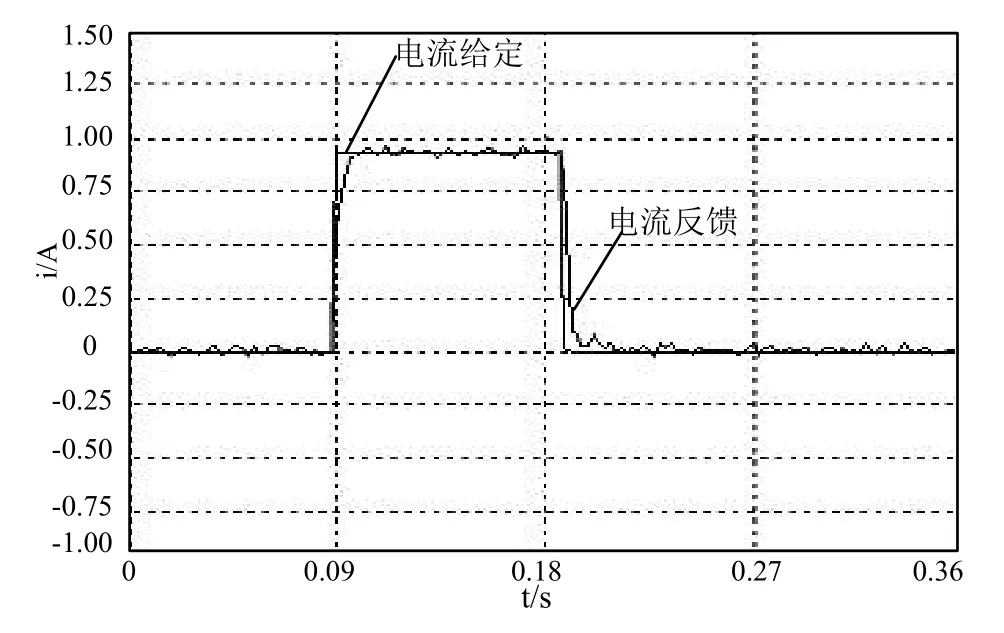
图6 电流阶跃响应波形

图7 关门速度给定与反馈波形
6 结论
本文分析了永磁同步直线电机的矢量控制策略,给出了门控器的设计框图与门系统的设计思想,并在台架上进行了实验验证。实验证明永磁同步直线电机作为城轨门系统的新型动力来源,控制方案可行,控制效果满足要求。为新一代高性能城轨门系统的研究作了相应的技术积累。
[1]王晓明,王玲.电动机的DSP控制[M].北京:北京航空航天大学出版社,2004.
[2]张代林.永磁同步直线电机伺服系统的控制策略和实验研究[D].华中科技大学,2006.
[3]杨少东.永磁直线同步电机控制技术的研究[D].浙江大学,2006.
TP311
A
1009-3044(2017)24-0218-03
2017-07-12