基于蒙特卡洛仿真的阻拦索辅助维修决策
2017-09-28孙明军糜玉林
孙明军,糜玉林
(海军航空工程学院, 山东 烟台 264001)
【后勤保障与装备管理】
基于蒙特卡洛仿真的阻拦索辅助维修决策
孙明军,糜玉林
(海军航空工程学院, 山东 烟台 264001)
在分析阻拦装置组成结构及其维修保障特点的基础上,通过历史着舰位置的记录和对阻拦索使用维护记录的实时监测,基于蒙特卡洛仿真建立阻拦索辅助维修决策模型。仿真结果表明:所建模型在一定程度上能够保证阻拦索高的任务可靠性和利用率,可为阻拦索的使用维修提供一种可行的辅助决策手段。
阻拦索;任务可靠性;蒙特卡洛仿真;辅助维修决策
阻拦索是航空母舰阻拦装置的关键件,其作用是阻拦舰载机着舰滑行,使舰载机在飞行甲板的有限距离内安全停住。在阻拦过程中阻拦索受力状况恶劣,可靠性要求高。阻拦索的可靠程度直接关系到着舰飞机的安全性以及阻拦装置的可靠性,一旦发生阻拦索破断将造成灾难性后果[1]。
当前常见的维修方式主要有事后维修、定期预防性维修和状态监控维修[2-3],考虑到阻拦索故障后果的严重性,阻拦索的维修方式主要采用定期预防性维修和状态监控维修相结合的维修方式。
文献[4]提出随着装备训练或执行任务的不断增多,装备使用频率越来越高,定期预防性维修周期在实际实施过程中,往往会与装备的训练或执勤任务相冲突,从而导致过维修或者维修不足的情况,最终无法充分发挥预防性维修的作用,或导致人力物力的浪费。
针对上述问题,本研究首先分析阻拦装置结构组成及其维修保障方式,通过历史着舰位置的记录信息和阻拦索的使用维护记录信息,采用蒙特卡洛仿真方法分析阻拦装置在当前状态下是否具有执行下次任务的能力即任务可靠性,进行是否进行阻拦索维修的辅助决策,实现阻拦索保持较高的任务可靠性和利用率。
1 阻拦装置分析
1) 阻拦装置组成分析
某型航母的阻拦装置由4套阻拦索装置组成,相应在飞行甲板上布置了4道阻拦索。
用S来表示阻拦装置,则有
S={Z1,Z2,Z3,Z4}
(1)
其中Zi(i=1,2,…,4)表示阻拦装置的第n道阻拦索。通过阻拦索的使用维护记录信息可知第i道阻拦索当前使用次数为Ni(i=1,2,…,4)。
2) 阻拦索维修方式
当前阻拦索的维修方式主要采用定期预防性维修和状态监控维修相结合的维修方式。
① 状态监控维修
通过监控检测对系统状态进行连续监控,发现某种故障征兆,即进行维修。比如:阻拦索发生扭结时,更换阻拦索。
② 定期预防性维修

3) 阻拦任务分析
阻拦任务按批次进行,每批次由不同的飞机架次组成,在批次阻拦任务内,舰载机依次着舰,要求在每个批次内阻拦索能够连续安全无故障的执行阻拦任务。
以阻拦索为研究对象,针对给定的训练任务计划和预防性维修周期进行分析,如图1所示。

图1 问题描述示意图
从图1可以看出,预防性维修工作落入任务执行期间(如图1中的P1就落在任务3批次执行过程中),舰载机不能按计划正常着舰。
4) 任务可靠度定义
阻拦索的任务可靠度为阻拦索执行完阻拦任务后阻拦索没有超出定期预防性维修次数的概率,其计算式为:

(2)
其中:N为仿真次数;n为未达到定期预防性维修的次数。
2 阻拦任务可靠度仿真分析
2.1 阻拦事件概率模型
某型航母上有4道阻拦索,舰载机经航母上的着舰引导官通过光学助降装置或全天候电子助降装置引导沿正确而稳定的下滑航线着舰,着舰点一般为第2或第3根阻拦索前。因此2道、3道阻拦索执行阻拦事件的概率高。由历史着舰位置的记录信息可知,第i道阻拦索执行阻拦次数为NAi(i=1,2,…,4),则任一次舰载机着舰落在第i道阻拦索的概率为:

(3)
2.2 阻拦任务可靠度仿真流程
用蒙特卡罗方法[5-8],对执行阻拦任务的阻拦索进行随机抽样,根据各阻拦索当前工作状态进行仿真,最后统计分析其任务可靠度,通过与设定的可靠度阈值进行比较决定是否采取维修活动。如果需要维修,首先对当前到达定期预防性维修次数多的阻拦索进行任务前更换,再与设定的可靠度阈值进行比较判断,直到达到设定的可靠度阈值要求。本文可靠度阈值设定为0.95,具体仿真流程如图2所示。
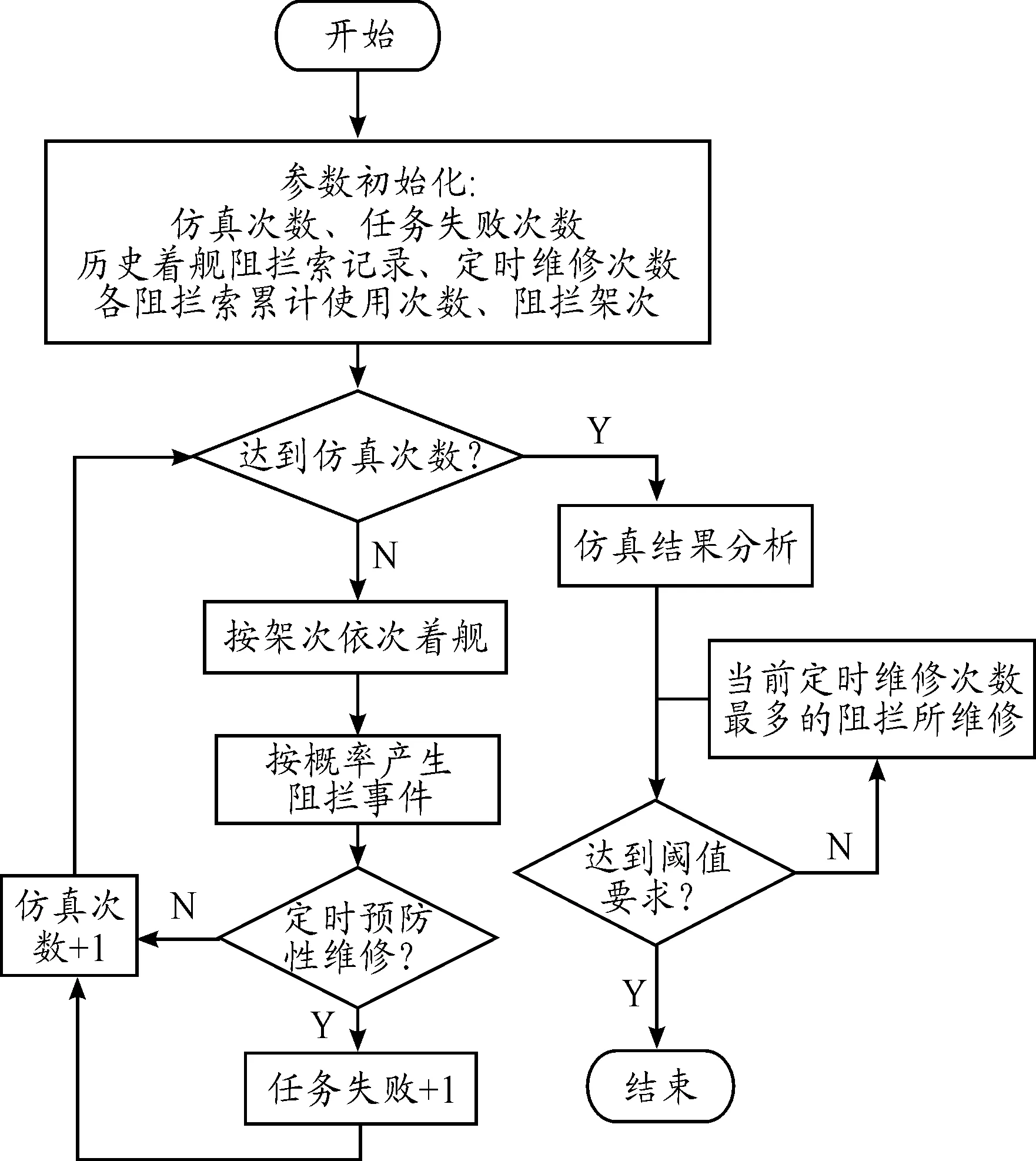
图2 仿真流程
3 辅助维修决策仿真实例
针对阻拦任务为5架次情况下,阻拦索需要维修和不需要维修两种情况进行分析。
1) 达到可靠度阈值要求
各阻拦索历史着舰次数、阻拦索的使用次数和定期预防性维修次数如表1所示(数据经过处理)。
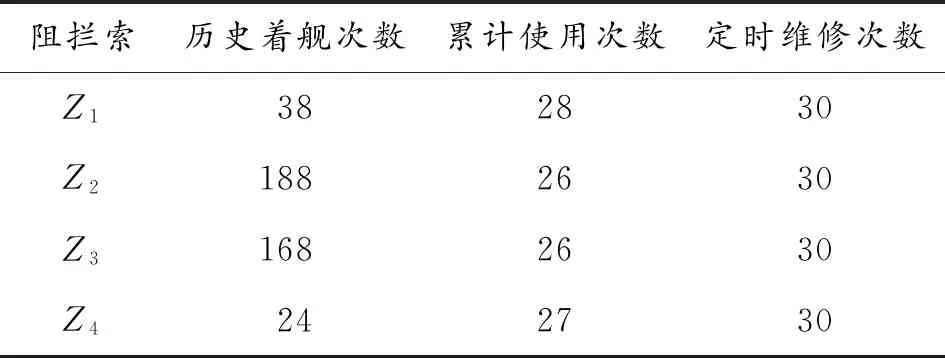
表1 需要维修时各阻拦索信息
现对各阻拦索执行阻拦任务进行1 000次仿真,按第1节介绍的任务可靠度公式算出其任务可靠度。取100次任务可靠度仿真结果如图3所示,部分结果如表2所示。
通过仿真结果可以得到任务可靠度为0.9653,大于可靠度阈值0.95,达到可靠度阈值要求,因此不需进行维修。
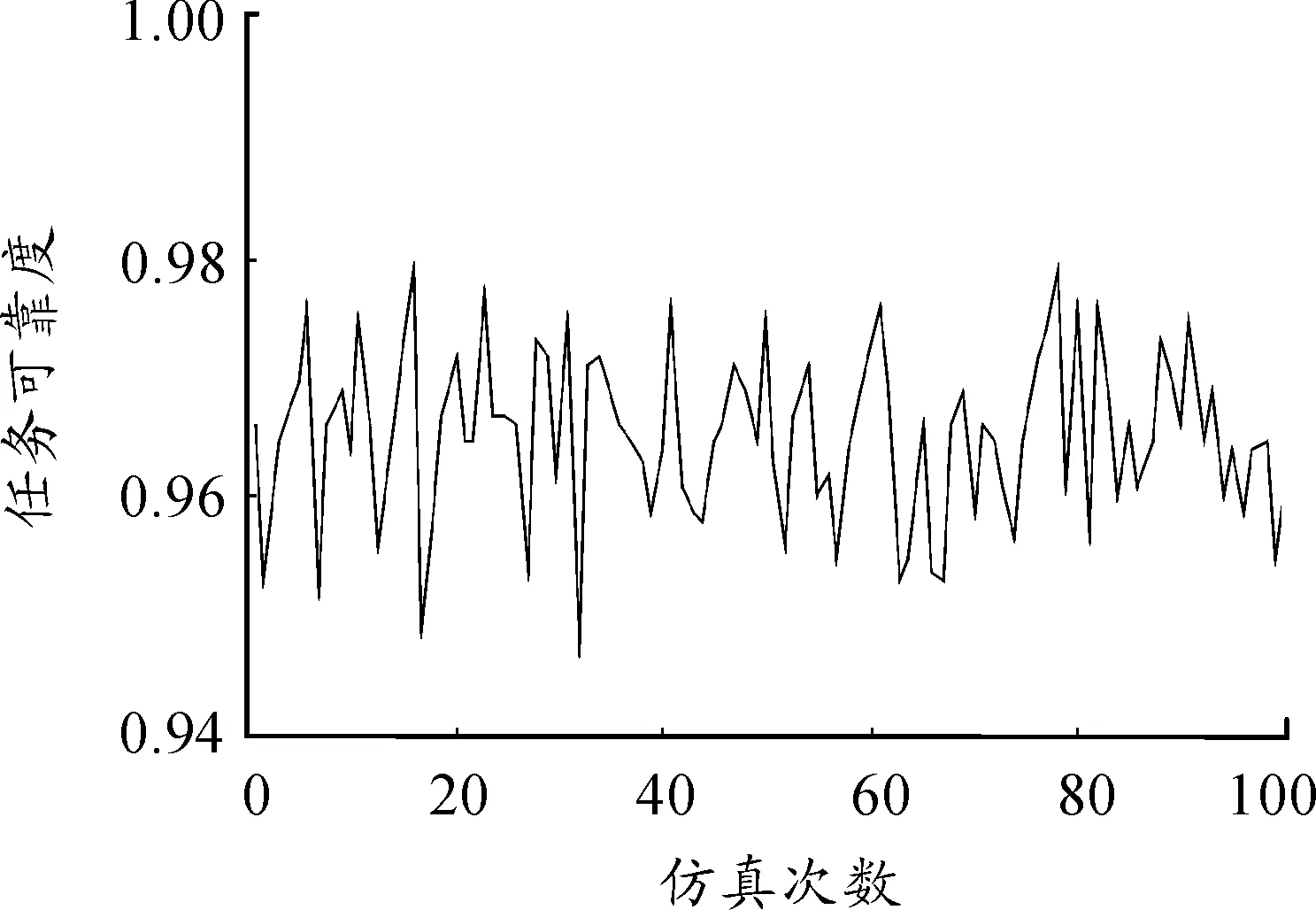
图3 需要维修时任务可靠度仿真结果

序号达到定期预防性维修次数仿真次数任务可靠度138.000010000.9620234.000010000.9660330.000010000.9700426.000010000.9740536.000010000.9640635.000010000.9650…………平均值34.680010000.9653
2) 未达到可靠度阈值要求
各阻拦索历史着舰次数、阻拦索的使用次数和定期预防性维修次数如表3所示(数据经过处理)。
现对各阻拦索执行阻拦任务进行1 000次仿真,按第1节介绍的任务可靠度公式算出其任务可靠度。取100次任务可靠度仿真结果如图4所示。

表3 不需要维修时各阻拦索信息
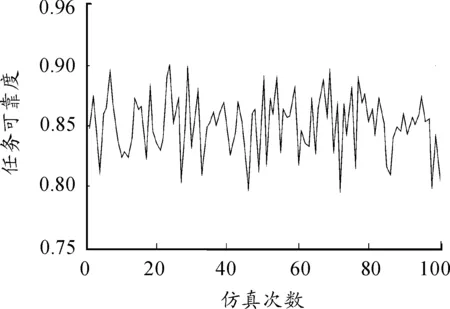
图4 不需要维修时任务可靠度仿真结果
通过仿真结果可以得到任务可靠度为0.851 2,小于可靠度阈值0.95,未达到可靠度阈值要求,因此需要进行维修。
根据仿真结果,统计出各阻拦索在任务期间到达定期预防性维修次数,结果如表4所示。

表4 到达定期预防性维修次数
由表4可以看出,第2道阻拦索是当前任务期间到达定期预防性维修次数最多的阻拦索,故对其进行维修,维修后Z2的累计使用次数为0,第2道阻拦索维修后任务可靠度为0.984 7,大于可靠度阈值0.95,达到可靠度阈值要求,因此其他阻拦索不需要在任务前维修。
4 结论
基于蒙特卡洛仿真的辅助维修决策分析模型,综合考虑了阻拦装置组成结构及其维修保障的特点,通过历史着舰位置的记录和对阻拦索使用维护记录的实时监测来为阻拦索的使用维修提供辅助决策,该方法通过部队实际检验,在一定程度上能实现阻拦索保持较高的任务可靠性和利用率。
为进一步完善辅助维修决策分析模型,要注意历史数据的积累。通过不断积累的舰载机着舰位置历史数据,然后对这些历史数据分析、处理,可以得到更为准确地辅助维修决策分析模型,为决策提供技术支持。
[1] 鸥汛.航母的阻拦装置[J].现代舰船技术,2005,48(12):45.
[2] 鹏李.舰船装备保障维修策略优化模型仿真研究[J].舰船科学技术,2015,37(7):197.
[3] 勇魏,徐廷学,顾钧元.基于多阶段任务系统的成功率建模与仿真[J].计算机仿真,2011,28(3):5-10.
[4] 刘志勇,王立欣,程中华.考虑任务的单设备系统预防性维修决策优化研究[J].制造业自动化,2013,35(8):64-68.
[5] 邵松世,魏勇,赵峰.基于任务的舰炮装备保障性评价仿真算法研究[J].系统仿真学报,2014,26(1):11-16.
[6] 程文鑫,陈立强,龚沈光,等.基于蒙特卡洛法的舰船装备战备完好性仿真[J].兵工学报,2006,27(6):1094-1096.
[7] 王红征.基于故障树和蒙特卡罗仿真的系统可靠性分析[J].火力与指挥控制,2015,40(10):137-139.
[8] 肖刚,李天柁.系统可靠性分析中的蒙特卡罗方法[M].北京:科学出版社,2003.
(责任编辑唐定国)
AuxiliaryMaintenanceDecisionofArrestingCableBasedonMonteCarloSimulation
SUN Mingjun, MI Yulin
(Naval Aeronautical and Astronautical University, Yantai 264001, China)
Basing on analyzing the structure and characteristics of maintenance support of arresting cable, through the historical records of landing position and arresting cable real-time monitoring maintenance records and Monte Carlo simulation, a decision model of auxiliary maintenance of arresting cable is established.The simulation results show that the model can guarantee the reliability and utilization of the arresting cable to a certain extent, and can provide a feasible auxiliary decision-making means for the maintenance and use of the arresting cable.
arresting cable; mission reliability; Monte Carlo simulation; auxiliary maintenance decision
2017-04-19;
:2017-05-21
孙明军(1992—),男,硕士研究生,主要从事软件开发及信息管理技术研究。
10.11809/scbgxb2017.09.031
format:SUN Mingjun, MI Yulin.Auxiliary Maintenance Decision of Arresting Cable Based on Monte Carlo Simulation[J].Journal of Ordnance Equipment Engineering,2017(9):148-150.
V271.492
:A
2096-2304(2017)09-0148-03
本文引用格式:孙明军,糜玉林.基于蒙特卡洛仿真的阻拦索辅助维修决策[J].兵器装备工程学报,2017(9):148-150.
