道路网机动目标空地平台协同跟踪方法研究
2017-09-28孙再强李银伢戚国庆
孙再强,李银伢,戚国庆
(南京理工大学, 南京 210094)
【信息科学与控制工程】
道路网机动目标空地平台协同跟踪方法研究
孙再强,李银伢,戚国庆
(南京理工大学, 南京 210094)
结合道路网目标典型运动模态和道路信息,建立了受道路约束时的机动目标运动状态模型集;针对单个观测平台跟踪道路网上机动目标时容易出现目标跟丢,提出了空中和地面观测平台对道路网上机动目标的纯角度协同跟踪方法;基于自适应外推和最小二乘估计算法对观测信息进行初处理,结合目标状态模型集和道路约束信息,给出了基于交互式多模型(IMM)的道路网机动目标跟踪滤波算法,实现了对道路网上机动目标的连续高精度跟踪,仿真结果验证了所提方法的有效性。
道路网;机动目标;异步观测;协同跟踪
在城市反恐和安防中,利用观测平台对道路上可疑车辆和感兴趣目标进行跟踪是目前的热点研究课题。在城市道路网上的机动目标,容易受树木和建筑物的干扰,单个观测平台容易出现目标跟丢。采用多个地面固定观测平台组成的阵列对目标进行跟踪是一种可行的方式。然而,地面固定观测平台的探测范围有限且存在探测盲区。因此,相较于地面静止观测平台,采用移动观测平台协同对道路网机动目标进行跟踪,有效地将道路网等辅助信息融入目标跟踪中,是道路网目标跟踪研究的核心内容。
在对道路网运动目标的研究中,文献[1]总结出道路对过程噪声及目标速度的约束算法,提出了在道路节点时刻目标状态修正的方法,使观测性能得到了很大的提升。文献[2]利用变结构多模型算法对地面目标进行变周期量测,做到对可变模型的目标进行有效观测。文献[3-5]提出了多传感器同步策略,在进行信息融合前对多平台的量测值进行时间对准,避免融合后误差出现发散现象。文献[6-7]提出利用地图信息作辅助目标跟踪,进行传感器量测预处理和机动目标建模,将观测信息投影到地图上,结合地图信息减小道路以外的杂波影响。然而,这些也带来了新的问题,观测信息与地图信息的结合,对传感器的定位精度要求高;加入复杂算法之后,跟踪机动性很强的地面目标时,观测的实时性往往达不到要求。
本文针对单个静止观测平台易出现跟丢目标的问题,在充分挖掘道路约束信息基础上,提出一种地面和空中观测平台对道路网机动目标的协同纯角度跟踪方法。根据已知的道路网信息,考虑道路网对地面目标的约束,建立了受道路网信息约束的目标运动模型集,空地平台使用纯角度被动跟踪技术协同对目标进行跟踪,实现对道路网机动目标的连续高精度跟踪。
1 道路网目标运动模型
典型的地面道路网运动目标在地面直角坐标系下的状态方程可描述为
Xk+1=FXk+GWk
(1)
对于道路网上目标,其状态转移矩阵,输入矩阵和过程噪声矩阵都受道路的影响[1]。在式(1)的基础上,结合道路信息,可建立受道路约束的目标运动模型集:
Xk+1=FjXk+Gj(α)Wk(α)
(2)
式(2)中,Fj,Gj(α),Wk(α) 是加入道路约束信息后得到的修正的参数矩阵。
1.1 对状态转移矩阵的修正
地面机动目标的典型运动可由匀速(CV)模型,匀加速(CA)模型和匀速转弯(CT)模型来描述,对于道路网上机动目标,考虑道路方向对目标运动状态的影响,引入过渡曲线模型(CL)[8],利用这4种运动模型建立状态转移矩阵集:
(3)
式(3)中Fj的下标j对应的是不同的状态模型,其值对应的矩阵参数如下(T为状态周期,w为转弯率)[2]:
1)j=1时,CV模型:a=b=c=f=g=0,d=T,e=1。
2)j=2时,CA模型,参数为:
3)j=3时,CT模型,参数为:
4)j=4时,CL模型。
如图1所示,从一个路段到另一个路段过渡时,利用下一段道路的方向角与目标速度方向角的关系对目标的位置和速度进行修正,其状态转移矩阵如式(4)所示[2]:
(4)
(5)
式(5)中:βk为速度方向角;θ为速度方向角与下段道路方向的夹角。

图1 道路模型
1.2 对输入矩阵进行修正
对应1.1节中的四种模型,可建立如下的输入矩阵集Gj:
(6)
考虑道路方向角信息,修正后的输入矩阵为
(7)
1.3 对过程噪声方差的约束
过程噪声Wk定义为
(8)
式(8)中x轴、y轴上的过程噪声wx,wy可转换为平行于道路方向噪声和垂直于道路方向噪声:


(9)
因受道路约束,垂直道路方向的过程噪声分量的方差在减小,λ为减小后的系数值,其取值范围是0.25~0.9,由B/(δT2) 决定[8],B为道路宽度,α为道路方向与x轴的夹角。再利用噪声协方差对水平方向噪声进行约束:

(11)

(12)

(13)
(14)


今天,全球75.78亿人口中,移动通信用户占据2/3,约51亿人在已经在移动中让信息无处不在。根据GSMA的预测,到2021年,移动网络将会占据全世界IP(知识产权)视频流量的18%。这无疑是一场巨大的传媒转型,同时又是一场蓄势待发的数字革命。透过数字,或将喟叹一声:移动即未来,视频即王者。
(15)
2 空地平台道路网目标协同跟踪方法
2.1空地平台协同跟踪策略与观测信息初处理
以地面平台为主站,空中平台为从站,主站周期性地向从站发起协同请求,从站将观测信息反馈给主站,主站将自身观测信息与从站观测信息进行关联。主站对观测信息进行处理时,考虑时间异步的问题,需要先进行时间对准,然后再对观测信息进行融合、滤波[3]。如图2所示,跟踪坐标系xOy为水平面,h轴指向天顶。空中观测平台S1(x1,y1,z1)观测的高低角与方位角为(φ1,φ1),地面观测平台S2(x2,y2,z2)对目标的观测角为(φ2,φ2)。
(16)
(17)
(18)
图2 观测模型
考虑城市地面道路上运动目标在垂直方向上(高度)的变化量相对于水平方向上的变化量,非常微小,可以忽略不计。故设目标相对跟踪坐标系的高度参数hk=hc为常数。
当空地平台观测周期相同,时间不同步时,用自适应内插外推法进行时间配准[4-5]。地面平台与空中平台位置已知,利用坐标转换,将地面的观测角度信息转换到空中平台坐标系上,与空中平台自身观测的角度信息作时间对准,对准后的观测角度值再转换到地面平台坐标系上,更新之前的测量值。
(19)

(20)
时间对准过后,利用最小二乘纯角度跟踪将空地平台观测角度转换成位置信息。


(21)
(22)

当φ≠0时:

(23)
当φ=0时:
xk=xo,yk=yo,hk=hc
(24)
此时,正常跟踪的平台将估计位置转送给跟丢目标的平台,通过平台间信息共享和道路网信息辅助,引导跟丢目标平台运动到可对目标进行有效观测的位置重新进行跟踪。
2.2 基于IMM的空地平台跟踪算法

步骤1:输入交互


(25)
其中:


(26)
步骤2:滤波增益
状态预测值:
(27)
预测误差协方:
(28)
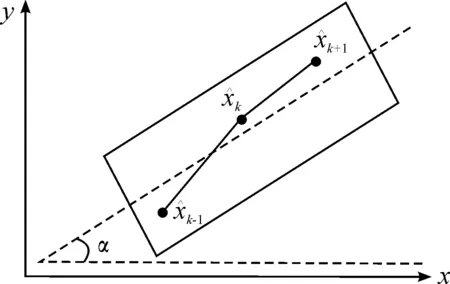
图4 观测值与道路约束

(29)
(30)

(32)


(33)
新息:
(34)
残差方差:
(35)
滤波增益:
(36)
k时刻状态滤波值和滤波协方差矩阵:

(37)
步骤3:模型概率更新
(38)
其中:

(39)
步骤4:输出交互

(40)
3 仿真验证及分析
3.1 道路模型
仿真道路参数:如图5所示,目标经过的道路长度一共7 km,其中有3个转弯,3道转弯的的角度都是90°,路宽为10 m。
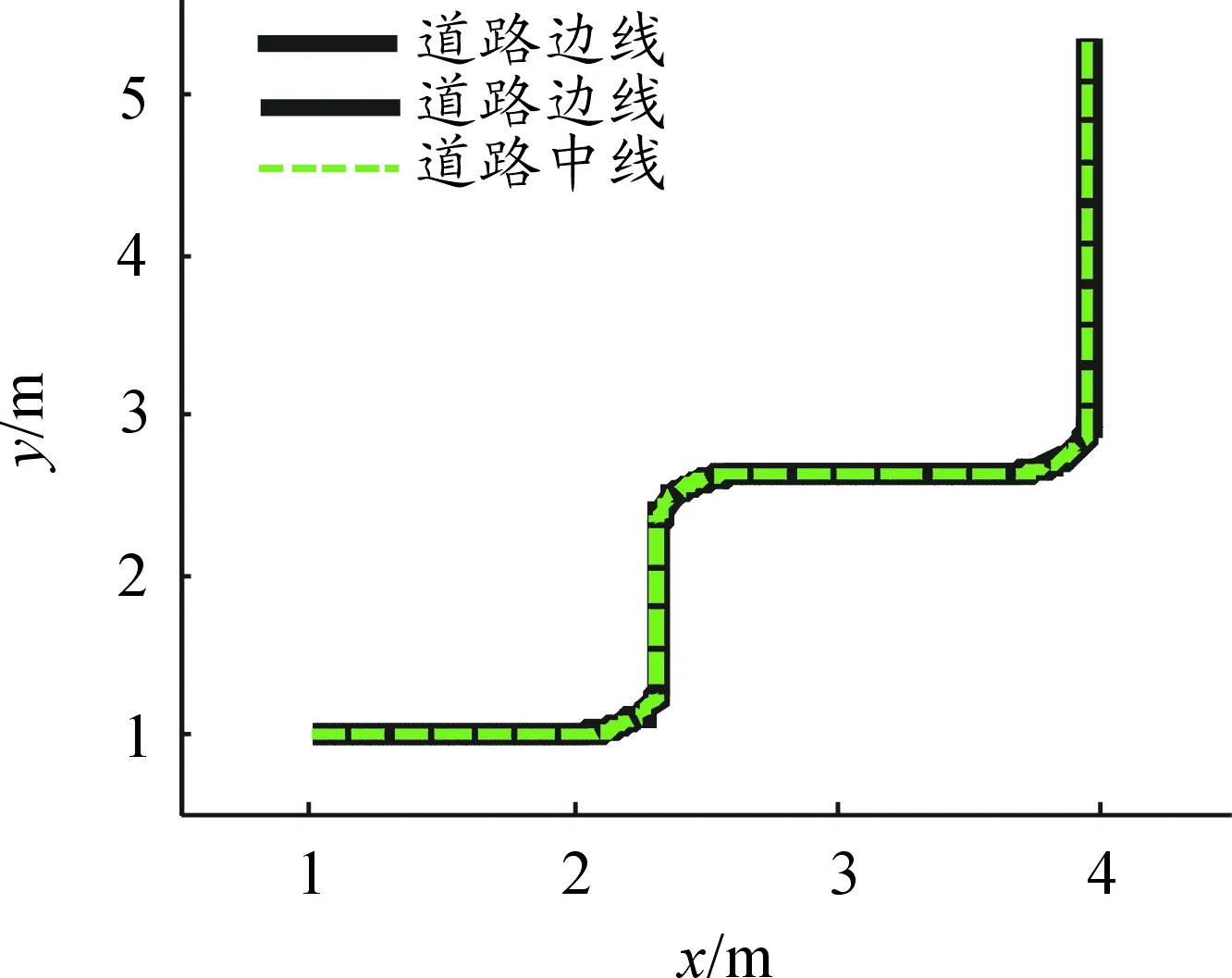
图5 道路模型
3.2 道路约束的合理性验证
如图6所示,目标初始速度10 m/s,采样周期T=1 s,每个坐标轴上的噪声标准差δ=0.1 m/s2。如图7所示,没有考虑道路约束时,对应的模型刻画的道路运动目标会严重偏离道路,偏离量在几十到几百米之间,与目标真实运动轨迹出现很大偏差。如图8所示,加入道路约束后,对应的模型刻画的目标运动轨迹始终在道路上,偏离道路中心线的距离在5 m内。
将道路方向角加入到对目标运动速度的约束,使得对道路网机动目标的运动速度刻画更为准确。从图9可以看出,无约束时目标速度误差越来越大,而有约束时,速度误差主要出现在转弯处,误差量控制在0.5 m/s以内。
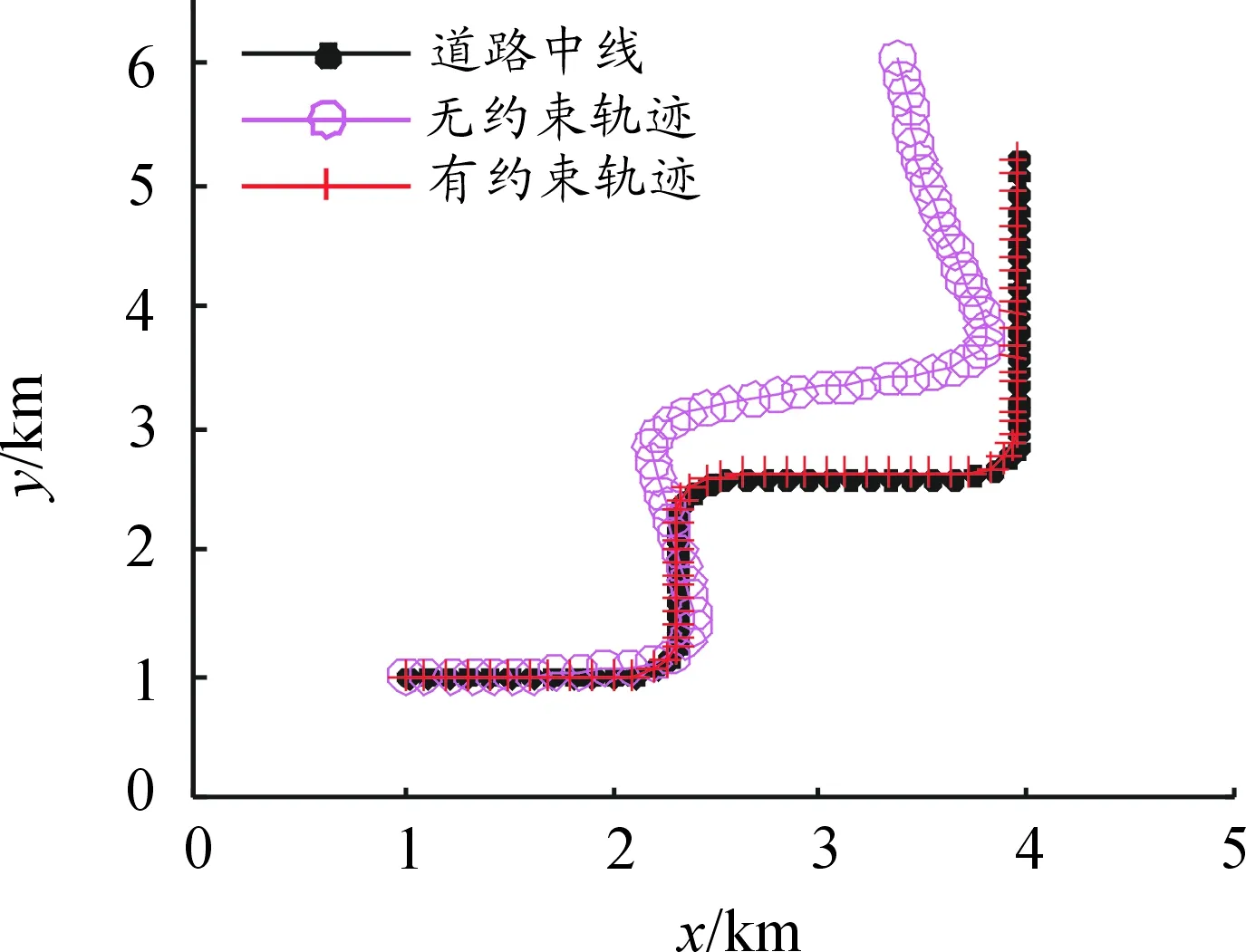
图6 目标受道路约束轨迹
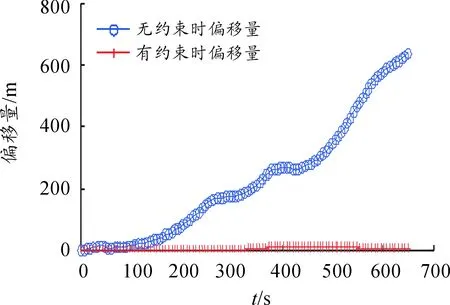
图7 目标偏离道路中心偏移量
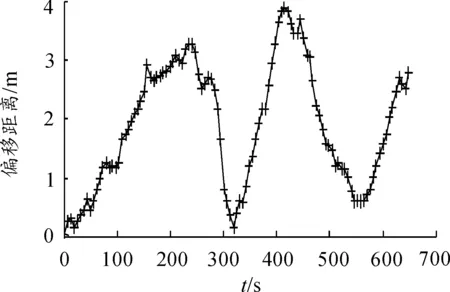
图8 有约束时偏移距离
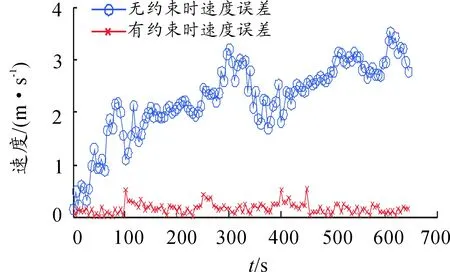
图9 对速度的约束
3.3 空地平台协同跟踪
设定如下观测场景,空中平台在目标所在道路上空等速飞行进行跟踪,初始位置为(905,905,100),地面观测平台初始位置(990,995,0),目标初始位置为(1010,995,0)。
如图10所示,跟踪过程中,在t=150 s时,地面平台在第一道转弯处跟丢目标。基于第2节的算法处理,空中平台将观测信息转送给地面平台,地面平台结合估计的目标实时位置与道路信息,循当前道路向目标预计会经过的第三道转弯处运动。在t=400 s时,地面观测平台在第三道转弯处又恢复了对目标的跟踪。将空中平台基于高程信息单独观测精度与空地平台协同观测精度进行比较,如图11所示。
由图11可以看出,单个空中平台观测的误差在10 m以上,而结合道路信息的空地平台协同观测的误差在5 m左右,即使在t=150~400 s时间段地面平台跟丢目标,结合道路信息的协同观测误差也比单个空中平台观测的误差要小。
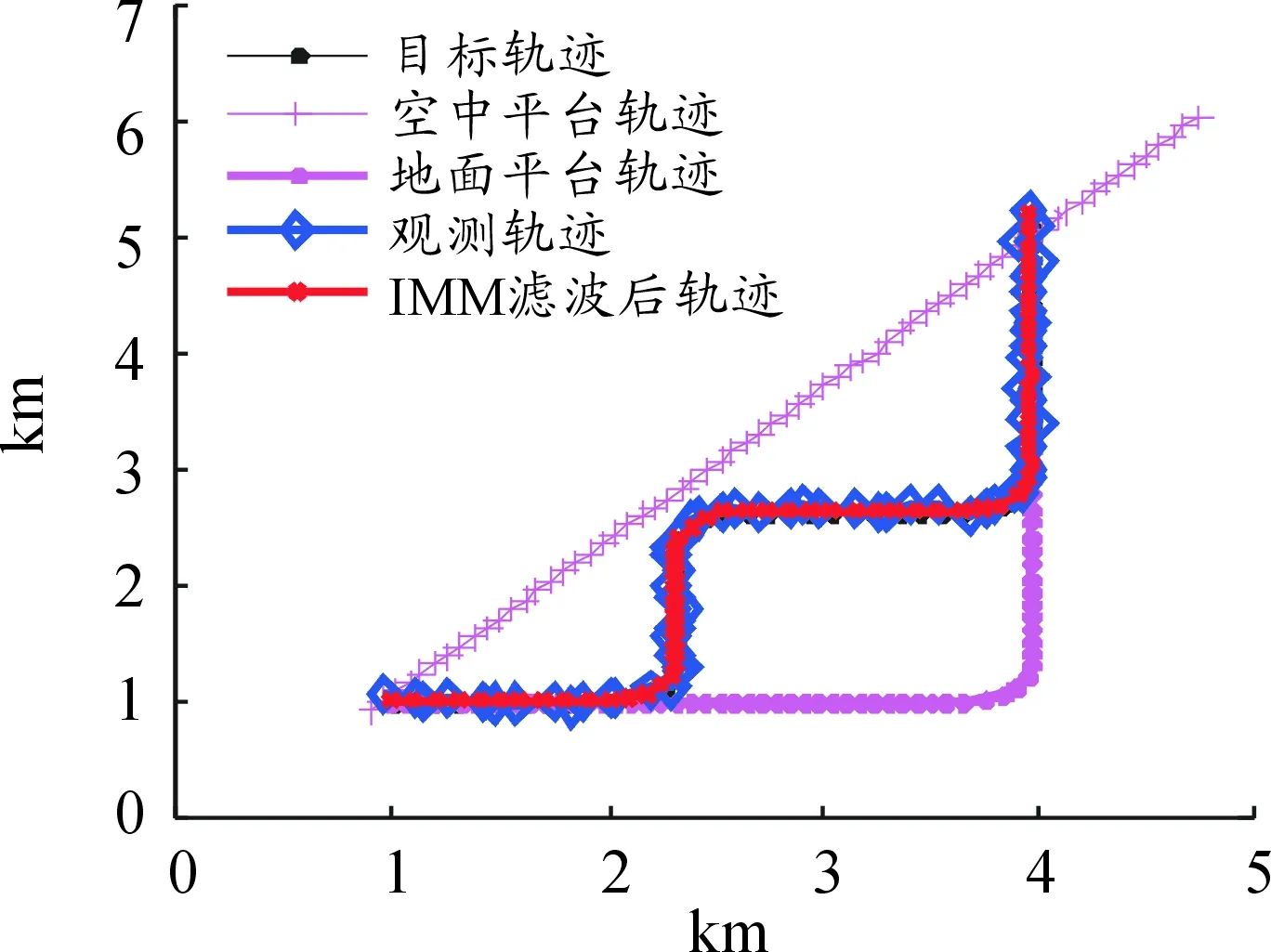
图10 目标跟踪与观测平面图

图11 单平台观测与协同观测精度比较
在进行初值估计后,用RF-IMM算法对观测值进行滤波。这里,观测周期为5 s,测量角度标准差δφ=δφ=1 mrad,用蒙特卡仿真50次。经IMM滤波过后,给出精度指标均方根误差RMSE:
(41)
RF-IMM滤波之后,由式(41)得到的RMSE如图12所示,RMSE由滤波前的20 m左右减小到5 m以内。

图12 滤波前后RMSE比较
4 结论
提出了一种空地平台协同对道路网上目标跟踪方法,结合道路信息建立了目标运动状态模型集。将道路网目标状态模型集融入到多模型算法中,结合道路信息给出了RF-IMM道路网机动目标跟踪滤波算法,提高了对道路网目标跟踪的精度和连续性。下一步将考虑将空地平台的机动策略引入道路网机动目标跟踪中。
[1] 贺丰收,繆礼锋,张莹.道路约束条件下的地面运动目标跟踪[J].火力控制与指挥,2015,40(3):46-55.
[2] Mallick M,Scala B F L.IMM estimator for ground target tracking with variable measurement sampling intervals[C]//International Conference on Information Fusion.IEEE Xplore,2006:1-8.
[3] 吴聪,王红,李志淮.基于最小二乘曲线拟合的时间配准方法研究[J].舰船电子对抗,2013,36(4):44-47.
[4] 牟聪.多传感器数据融合系统中数据预处理的研究[D].西安:西北工业大学,2006.3.
[5] 周中良,王阳,何景峰.基于自适应学习的多传感器融合时间管理[J].电光与控制,2007,14(6):33-35.
[6] HERRERO J G,PORTAS J A B,CORREDERA J R C.Use of map information for tracking targets on airport surface[J].IEEE Transactions on Aerospace & Electronic Systems,2003,39(2):675-693.
[7] KOCH W,KOLLER J,ULMKE M.Ground target tracking and road map extraction[J].Journal of Photogrammetry & Remote Sensing,2006,61(4):197-208.
[8] 王建国,何佩琨,龙腾.道路约束Kalman滤波中的应用[J].信号处理,2003,19(4):295-299.
[9] 韩涣涣.一种侧向多目标被动跟踪方法的研究[D].南京:南京理工大学,2009.
[10] 李洋,杜立夫,禹春梅.一种基于复合模型的机动目标跟踪算法[J].四川兵工学报,2015(5):127-132.
[11] KEYI,CHEN,GONGJIAN,et al.Complex motion modeling and state estimation in road coordinates[J].Journal of Harbin Institute of Technology,2017,24(1):19-25.
(责任编辑杨继森)
CooperativeTrackingMethodofRoadNetworkManeuveringTargetBasedonAerialandGroundPlatforms
SUN Zaiqiang, LI Yinya, QI Guoqing
(Nanjing University of Science and Technology, Nanjing 210094, China)
In this paper, based on typical motion modes and road network information, the dynamic model of maneuvering target on road network is established. Aiming at the problem that the target is easy to be lost when a single observation platform is used to track the moving target on road network, this paper presents an cooperative tracking approach using aerial and ground observation platforms for the maneuvering target on the road network. Based on the adaptive extrapolation and least square estimation algorithms, combined the target state model set and road network information, this paper proposes an IMM based algorithm for tracking the maneuvering target of road network. The high tracking precision of maneuvering targets on road network is obtained, and simulation results verify the effectiveness of the proposed method.
road network; maneuvering target; asynchronous observation; cooperative tracking
2017-04-23;
:2017-05-20
:国家自然科学基金资助项目(61273076)
孙再强(1992—),男,硕士研究生,主要从事目标定位与跟踪研究;李银伢(1976—),男,博士,副研究员,主要从事非线性估计理论及其工程应用研究。
10.11809/scbgxb2017.09.020
format:SUN Zaiqiang, LI Yinya, QI Guoqing.Cooperative Tracking Method of Road Network Maneuvering Target Based on Aerial and Ground Platforms[J].Journal of Ordnance Equipment Engineering,2017(9):95-101.
TP29
:A
2096-2304(2017)09-0095-07
本文引用格式:孙再强,李银伢,戚国庆.道路网机动目标空地平台协同跟踪方法研究[J].兵器装备工程学报,2017(9):95-101.
