无人直升机等效仿真平台开发
2017-09-28陈光山廖幻年孔寒雪
夏 斌,冯 昊,陈光山,廖幻年,孔寒雪
(上海航天控制技术研究所, 上海 201109)
【装备理论与装备技术】
无人直升机等效仿真平台开发
夏 斌,冯 昊,陈光山,廖幻年,孔寒雪
(上海航天控制技术研究所, 上海 201109)
依据“等效飞控”的开发思想,利用μC/OS-Ⅱ实时内核在windows环境下的可移植性,保证等效仿真平台与机载实时内核具有相同的任务调度功能,设计了无人直升机等效飞控软件,实现PC机环境下的实时仿真,并对FlightGear视景软件进行二次开发,实现无人直升机全过程飞行仿真演示; 在PC机环境下快速验证制导控制策略的合理性和鲁棒性,不受限于硬件条件的诸多限制,提高飞控软件的开发效率。
等效飞控;无人直升机;等效仿真;制导控制策略
无人直升机等效仿真环境是半物理实时仿真环境的补充,主要由动力学模型软件和等效飞控软件等组件组成。等效仿真环境可以贯穿于无人直升机飞行控制开发周期内,快速验证飞控软件中的导航、制导与控制模块的功能以及逻辑正确性。文献[1-2]基于FlightLab(仅在Linux平台使用)线性化之后的线性模型组进行等效仿真和半物理仿真,实现了无人直升机模型从无到有的重大突破,解决了空中阶段的设计和仿真问题;为了追求建模的准确性,文献[3]采用德国RTdynamics公司开发的专业直升机建模软件RotorLib进行建模,对其进行二次封装成模型库,在C/Matlab环境下进行仿真研究,基本实现了闭环,但是未针对起降阶段无人直升机模型特性进行研究。本研究在前人的基础上,对RotorLib软件建模进行深度挖掘,从模型角度实现了从空中、地面全过程的仿真验证,并对起降阶段各通道的控制方案进行调整,获得了良好的控制性能,成功应用于工程型号。
1 核心思想
等效的核心思想在于:在Windows环境下进行飞控系统的开发和实时仿真验证,实现PC机与飞控机环境下控制时序、控制逻辑完全等效,其导航、制导、控制功能模块无需任何修改就能移植到嵌入式飞行控制计算机中进行半物理实时仿真以及后续的试飞环节。
核心技术:在PC机windows开发环境和嵌入式飞控计算机中使用相同的实时内核,使得开发者能在相同的实时核平台上开发软件,其开发构思流程如图1所示。

图1 开发构思流程示意图
脱离飞行控制计算机和仿真计算机等硬件条件的限制,独立于仿真计算机和飞控计算机的硬件约束,避免因飞控代码的改动而重复多次进行烧录,仍然能够进行飞行控制相关工作的开发,提高开发效率。PC机环境下不仅可以对飞行控制软件进行控制逻辑验证,而且在仿真过程中能够有针对性地动态注入不确定性,验证控制律的鲁棒性;经验证后的飞行控制律移植到机载飞行控制计算中进行半物理实时仿真,最后进行样例无人直升机的试飞工作,降低试飞风险。
2 方案设计
在PC机环境下的等效仿真环境主要由样例无人直升机动力学模型软件、等效飞控软件、遥控遥测软件和独立视景软件共同组成。等效仿真环境的总体框架如图2所示。

图2 总体框架
2.1 动力学模型模块
动力学模型能够逼真地反映样例无人直升机的物理特性[4-7]。模型实时接收等效飞控软件中的舵面输出,作为动力学模型的操纵输入,然后进行模型的迭代解算,将实时解算出的飞行状态量经串口实时发送给等效飞控,同时将模型解算出的旋翼相关信息和有关运动场景的信息通过UDP发送给FlightGear作三维视景显示。仿真模型软件框架如图3所示。

图3 仿真模型软件框架
为了兼顾仿真过程中的实时性,通过Windows提供的多媒体定时器模块进行模型解算环节的调度,设置解算周期为5 ms;输入4路操纵舵面值(总距、纵/横向周期变距、尾桨距),根据模型输出飞行状态变量的物理特性,划分为快慢帧进行发送,表1~表2分别列出了模型和等效飞控之间的数据交换快慢帧的数据定义。表3为上行数据帧的定义。
为了便于后续的仿真验证分析,对直升机模型进行了封装,并提供相应的接口功能函数供用户使用,表4列出了动力学模型封装库的函数。
通过模型封装技术和规范化函数的接口,该模型库能够真正实现无人直升机从地面开车到空中巡航飞行以及最后返航着陆至停机坪的全过程非线性仿真,满足现阶段无人直升机飞行控制功能验证的需求,如飞行过程中动态注入不确定性(发动机转速的波动、常值风、紊流风等大气扰动以及空中停车功能)。

表1 下行快帧数据定义
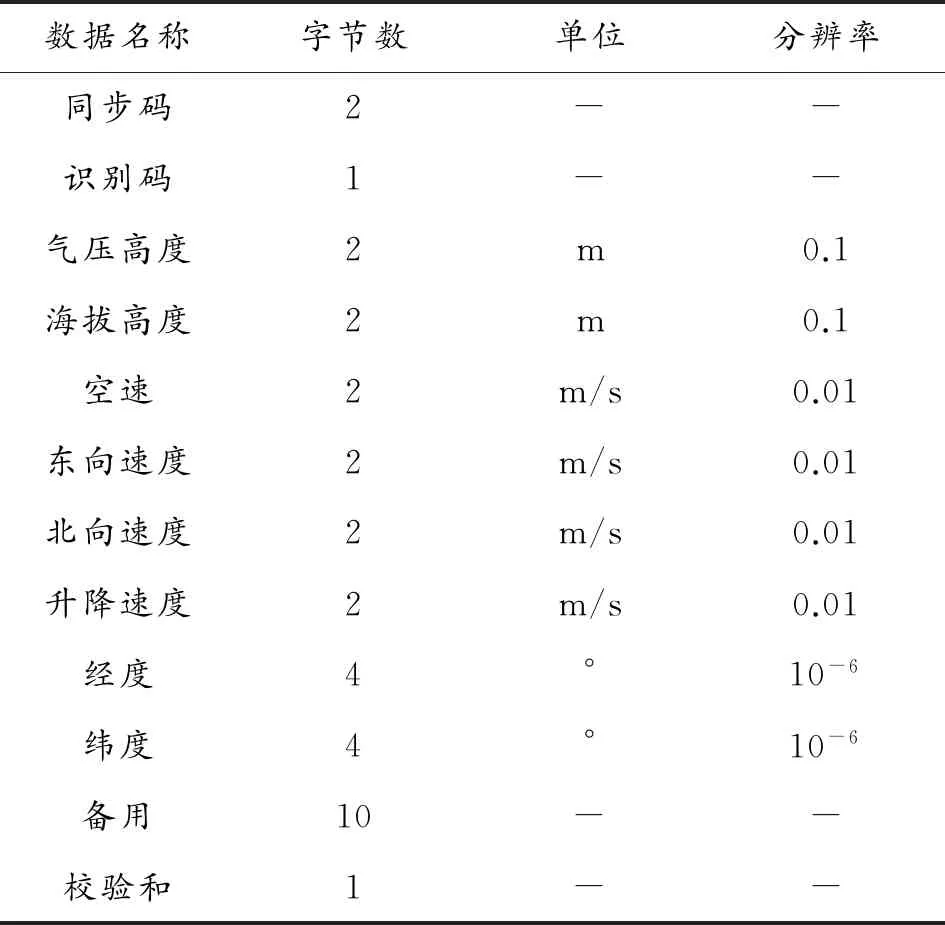
表2 下行慢帧数据定义

表3 上行数据帧定义

表4 动力学模型封装库函数列表

续表(表4)
2.2 等效飞控模块
该模块主要验证上层控制逻辑的正确性,仿真过程中实时接收动力学模型的飞行状态供控制律进行解算,并将解算后的控制舵面输出给样例无人直升机的动力学模型。
为了实现控制代码在PC机和飞行控制计算机下的等效,在Windows环境下进行μC/OS-Ⅱ的移植,保证等效飞控与机载飞控具备μC/OS-Ⅱ的任务、时间、信号量等管理功能,实现多任务创建、任务优先级分配等,保证上层飞行控制代码的等效性。结构框图如图4所示。

图4 等效飞控软件框架
以下简要描述等效飞控软件功能模块:
1) 传感器模块
在PC机下模拟机载飞控中传感器的接收功能,实时接收动力学模型的飞行状态。机载传感器大致包括GPS、大气机、磁力计、无线电高度表、垂直陀螺、角速率陀螺等。可模拟传感器的测量误差、信号死区等基本特性,简易验证不同传感器自身特性对控制性能的影响。
2) 执行机构模块
该模块主要模拟舵机输出功能,将控制律解算得到的变距操纵量转化为执行机构的舵面输出,并进行组帧,经过串口发送给无人直升机的动力学模型。
3) 遥控遥测模块
遥控遥测模块主要接收遥控遥测软件上行的遥控指令和下行的遥测信息,从测控软件接收遥控指令,将飞行状态按照协议组帧并实时发送给测控界面显示。
4) 导航控制模块
该模块是整个等效飞控软件的核心,其软件架构、时序、控制逻辑与机载部分完全相同。经等效仿真验证后的飞行控制律可以100%移植到机载飞行控制计算机中。等效飞控的导航控制代码能从windows平台上直接移植到目标机内运行正是开发等效飞控的核心思想。
5) 监控界面
Windows环境下的等效飞控软件采用VC6.0作为编译环境,为了方便飞行控制律的调试,可以利用PC显示功能将重要的飞行状态信息打印在DOS界面上,主要包括无人直升机的飞行参数、飞行模态以及控制舵面参数等信息,如图5所示。

图5 监控界面示意图
6) 数据通信模块
该模块主要利用Windows平台下的串口通信库实现数据通信功能。它将执行机构模块数据和测控模块的下行数据通过串口输出,接收测控模块上行数据和仿真模型数据。
2.3 遥控遥测模块
该模块主要供地面工作人员使用,主要发送遥控指令和遥调指令,并接收飞控输出的飞行状态信息和飞行模态,供地面人员对无人直升机的飞行过程进行实时监控。
2.4 独立视景模块
该模块对FlightGear进行二次开发实现独立视景仿真,对无人直升机通过逼真的三维视景展现无人直升机的运动场景,容易获得直观、立体的感受。对FlightGear的数据传输协议进行更改,添加与直升机旋翼相关的变量,表5列出了传输协议中新增旋翼相关的变量。
3 仿真验证
借助等效仿真环境进行样例无人直升机全过程飞行仿真,其中包括自动起飞、小速度前飞、侧飞、悬停回转、自动着陆等典型飞行科目,在不同的飞行阶段动态注入常值风、紊流风、动态风干扰,验证飞行控制律的鲁棒性。

表5 新增变量

图6 仿真示意图
3.1 仿真案例
以地面停留状态为起始状态,自动起飞后进入三角形的航线飞行(见图7),航路飞行任务完成后,悬停在着陆点上空,最后自动着陆,在航路飞行以及起降过程中加入不同的动态干扰,尤其在自动着陆阶段,对着陆的位置精度要求较高。

图7 三维航路飞行示意图
无人直升机的飞行轨迹为:A-B-C-A,表6列出不同航段的飞行科目和大气扰动类型。
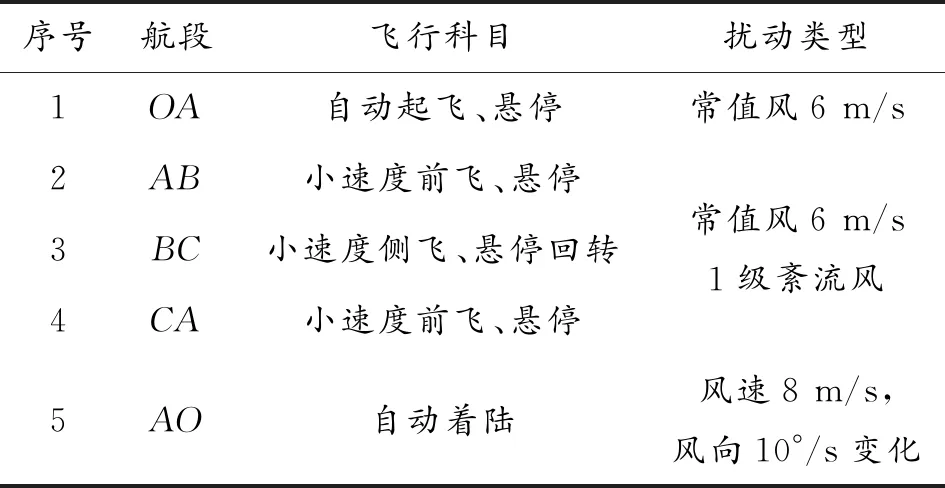
表6 各航段飞行科目一览表
1) 起飞阶段:自动起飞时加入6 m/s的西风,考察自动起飞阶段位置、航向保持精度;
2) 空中阶段:重点考察空中飞行阶段的保持高度、以及悬停回转阶段的航向跟踪性能;
3) 着陆阶段:重点考察自动着陆时的着陆点精度、航向保持性能以及触地速度。
3.2 仿真结果
按照3.1节中的仿真案例进行六自由度全过程非线性仿真,在不同的飞行阶段加入不同的干扰项考核无人直升机的飞行控制品质。
图8~图9曲线表明不同的大气扰动下无人直升机的三轴角速率(滚动角速率、俯仰角速率、偏航角速率)以及姿态角(滚转角、俯仰角、偏航角)均能够保持平稳;尤其在悬停回转模态,尾桨通道的控制能够对航向进行准确的跟踪控制,自动着陆阶段大气扰动增强,动态变化的风场环境下航向偏差保持在±1°以内。

图8 全过程飞行过程中三轴角速率响应
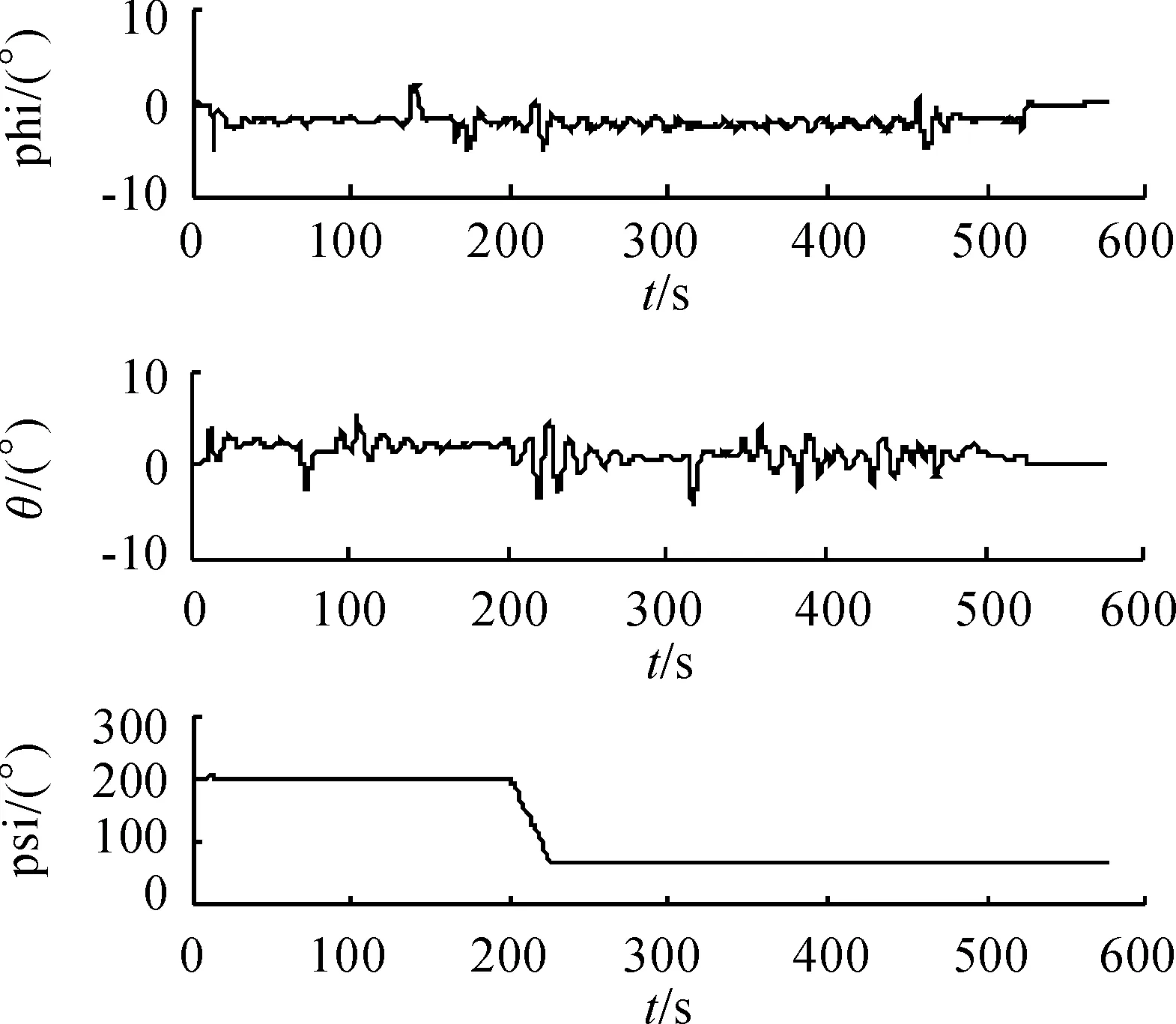
图9 全过程飞行过程中三轴姿态角响应
图10~图11表明在全过程飞行过程中,直升机在起飞和着陆阶段对升降速度和高度的均能进行准确跟踪;在小速度前飞和侧飞阶段升降速度的控制偏差保持在±0.2 m/s,高度偏差控制在±0.55 m内;自动着陆时的触地速率0.15 m/s,满足指标。
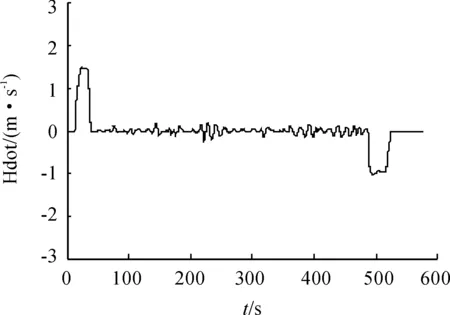
图10 全过程飞行过程中升降速度响应

图11 全过程飞行过程中高度响应
图12~图13为起降阶段无人直升机纵横向位置偏差曲线,在整个起飞阶段加入不同程度的大气扰动,位置控制精度始终保持在误差的范围内(半径3 m的圆内),对常值风和动态风场的适应能力强。

图12 自动起飞纵横向位置响应

图13 自动着陆纵横向位置响应
4 结论
介绍了无人直升机的等效仿真环境和等效飞控的设计理念,为无人直升机飞行控制软件的开发提供了一种新的思路,为飞控软件功能的快速验证构建了仿真验证环境。能够实现在C语言环境下快速验证飞行控制软件中制导、控制功能模块的逻辑合理性和正确性以及不同制导控制策略的优越性。
[1] 尹亮亮.无人直升机飞行控制若干关键技术研究[D].南京:南京航空航天大学,2012.
[2] 王刚强.大气扰动下无人直升机悬停段位置控制律设计[D].南京:南京航空航天大学,2013.
[3] 徐凯铭.无人直升机悬停状态位置及航向控制技术研究[D].南京:南京航空航天大学,2015.
[4] 范国恒.基于FlightGear无人直升机硬件回路仿真系统的设计[D].广州:华南理工大学,2013.
[5] 蔚海军.基于FlightGear的直升机飞行模拟系统研究[D].大连:大连理工大学,2008.
[6] 栗英杰.直升机飞行模拟器关键技术研究[D].长春:吉林大学,2013.
[7] 徐桂甲.基于MPC555和μC/OS-Ⅱ的无人机飞行控制软件开发技术研究[D].南京:南京航空航天大学,2010.
[8] 张奕烜,宋科璞,张翔伦.基于反馈线性化的无人机盘旋控制器设计[J].兵工自动化,2015(9):54-57.
[9] 夏斌,黄一敏,孙春贞.无人直升机自动起降段高度控制技术研究[J].兵器装备工程学报,2016(3):90-93.
(责任编辑周江川)
SimulationPlatformDevelopmentforUnmannedHelicopter
XIA Bin, FENG Hao, CHEN Guangshan, LIAO Huannian, KONG Hanxue
(Shanghai Aerospace Control Technology Research Institute, Shanghai 201109, China)
According to the idea of “equivalent flight control”, the paper has achieved the unmanned helicopter equivalent simulation verification software based on the μC/OS-Ⅱ possessed the same function of task scheduling in the Windows XP, and has the secondary development above FlightGear software to realize the simulation demonstration.The equivalent simulation platform can enhance the develop efficiency without hardware limitation, and verify the rationality and robustness of control and guide strategy under the PC environment.
equivalent flight control; unmanned helicopter; simulation demonstration; control and guide strategy
2017-04-22;
:2017-05-23
夏斌(1991—),男,硕士研究生,主要从事无人机飞行器飞行控制技术研究。
10.11809/scbgxb2017.09.017
format:XIA Bin, FENG Hao, CHEN Guangshan, LIAO Huannian, et al.Simulation Platform Development for Unmanned Helicopter[J].Journal of Ordnance Equipment Engineering,2017(9):81-86.
V249
:A
2096-2304(2017)09-0081-06
本文引用格式:夏斌,冯昊,陈光山,等.无人直升机等效仿真平台开发[J].兵器装备工程学报,2017(9):81-86.
