基于MEMS/北斗的火箭弹弹道参数测量方法
2017-09-28张浩然易文俊袁丹丹
张浩然,易文俊,管 军,袁丹丹,孙 蕾
(南京理工大学 瞬态物理国家重点实验室, 南京 210094)
【装备理论与装备技术】
基于MEMS/北斗的火箭弹弹道参数测量方法
张浩然,易文俊,管 军,袁丹丹,孙 蕾
(南京理工大学 瞬态物理国家重点实验室, 南京 210094)
利用北斗定位系统计算弹道轨迹,利用MEMS惯性测量单元解算弹道惯性参数,并通过无迹卡尔曼滤波器(UKF)对两者的数据进行数据融合,以提高弹道参数测量的精度。分析了各弹道参数的测量方法,设计了无迹卡尔曼滤波器,并利用某型制导火箭弹的六自由度仿真数据对组合导航算法进行验证。仿真结果分析表明:基于UKF的MEMS/北斗组合测量方案能够有效地对火箭弹的弹道参数进行测量,且通过UKF滤波器进行数据融合能够消除纯惯导测量时数据发散等问题,精度达到制导火箭弹导航要求。对微惯性器件上弹应用提供了一定的理论支持。
火箭弹;弹道参数测量;微惯性测量单元;北斗接收机;无迹卡尔曼滤波器
随着现代化武器的进步,火箭弹被大量使用并朝着低成本、小体积、制导化、一体化的方向发展。为提高火箭弹的打击精度,近些年国内外的研究重点放在对其进行制导化改造,其实质就是对火箭弹的实际飞行弹道进行测量和控制。一般情况下,为获取准确的飞行状态,需要实时对飞行弹道参数进行测量,包括弹体空中坐标、飞行速度、飞行姿态和弹道轨迹等信息,为后续的弹体稳定性、操控性分析,弹道修正[1]和舵控提供数据支持。有大量学者对弹道参数进行过测量研究。文献[2]提出利用测速雷达和光学经纬仪对弹丸的切向速度进行测量。但由于体积大操作困难,不宜作为实时导航系统;文献[3]提出利用陀螺和加速度计对弹道参数进行测量,并利用轴向加速度作为量测值进行误差估计,但并未解决陀螺仪在长时间应用时存在较大误差的问题;文献[4]提出了磁传感器和GPS组合导航的方案,对飞行弹体的姿态和位置进行了有效估计;文献[5]给出了多种低成本火箭弹的弹道测量方案,包括卫星地磁方案,无线电测控方案和MEMS组合方案。卫星地磁方案虽然体积小,结构简单,但其精度相对较差;无线电测控方案抗干扰性强,但需配合地面测控系统,增加了作战时的复杂性;MEMS组合方案精度高,成本低,虽工程化程度不高,但未来发展前景看好。
随着近年来MEMS微测量技术的发展,体积小、成本低、功耗低、抗冲击性强等优点,使微惯性测量单元(MIMU)在低成本火箭弹的弹道参数测量中有着很大优势。但由于随机漂移等现象,MIMU的误差随着时间增加而发散,这使得MIMU不能单独作为导航装置使用。随着中国自主研制的北斗卫星定位系统的完善,北斗卫星系统的定位、测速精度均保持稳定,无发散现象。本研究结合MIMU和北斗卫星定位系统各自的优点,利用MIMU对火箭弹惯性参数进行测量,通过解算得到低精度的位置、速度、姿态值,利用北斗卫星接收机计算的位置、速度值作为量测量,通过数据融合对MIMU的测量误差进行估计、补偿,以得到高精度的火箭弹弹道参数。
1 MEMS/北斗组合测量方案
1.1 组合测量系统组成
测量系统由电源模块,三轴微陀螺仪和三轴微加速度计组成的传感器模块,北斗卫星天线及接收机模块,数据处理模块等组成。系统组成示意图如图1。在火箭弹出炮口后,弹载传感器,北斗接收机,弹载计算机,黑匣子等设备上电,微惯性传感器测量角速度、线加速度等惯性参数,北斗接收机接收卫星信号,对飞行位置和速度进行解算。两路信号输入到弹载计算机上进行数据融合,得到精确的弹道参数。
弹道参数包括弹体空中坐标,飞行速度,飞行姿态,如何利用MIMU/北斗组合测量更精确的弹道参数是本文的研究重点。MIMU/北斗组合导航的目的是为了获得更精确的测量值,以实现更加准确可靠的导航制导。一般来说,MEMS传感器的起始精度高,更新频率快,但存在严重的误差累积;北斗卫星系统的精度相对较差,且更新频率慢,但不存在长时间漂移;将二者的测量信息进行数据融合,不仅可以消除误差发散,且能提高测量精度和数据更新频率,类似无漂移纯惯导测量。
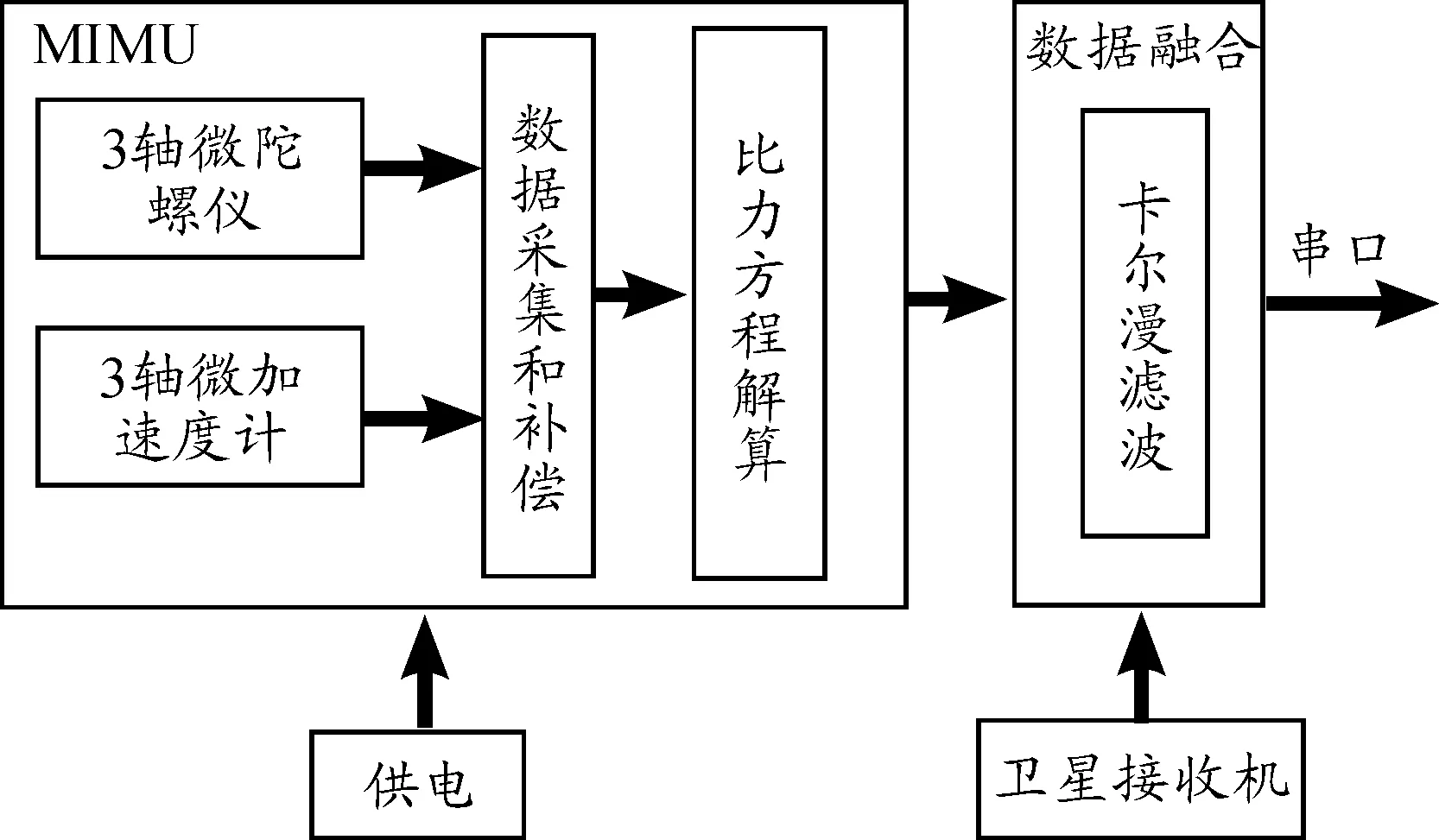
图1 组合导航系统组成示意图
1.2 惯导解算原理及坐标系选取
本文所研究的微惯导属于捷联式惯性系统,陀螺固联在弹体上,数据解算是在虚拟的数学平台上完成的。在弹道参数测量中涉及到如下坐标系:惯性坐标系,地球坐标系,地面坐标系,弹体坐标系,弹道坐标系,速度坐标系,导航坐标系等。具体的定义在钱杏芳的《导弹飞行力学》一书中给出了详细的解释[6,7],在此只对以下坐标系进行说明。
本研究中,弹体坐标系选用前上右坐标系;地面坐标系的原点选取在导弹发射点,X轴沿弹道面与水平面的交线,Y轴沿地理垂线方向,Z轴与其他两轴垂直;导航坐标系是求解导航参数时所选取的坐标系,通常与地理坐标系重合。但考虑到弹箭发射时方位角随机,本文将导航坐标系设置如下:原点位于弹体质心,X轴沿弹体发射面与水平面交线方向,Y轴沿水平面内垂直于X轴的方向,Z轴沿当地地理垂线方向。本文对导航坐标系的选取原则是与地面坐标系保持平行,只是坐标原点在弹体上。
弹体坐标系和导航坐标系之间的方向余弦如式(1)所示,由载体的姿态和航向决定。
(1)

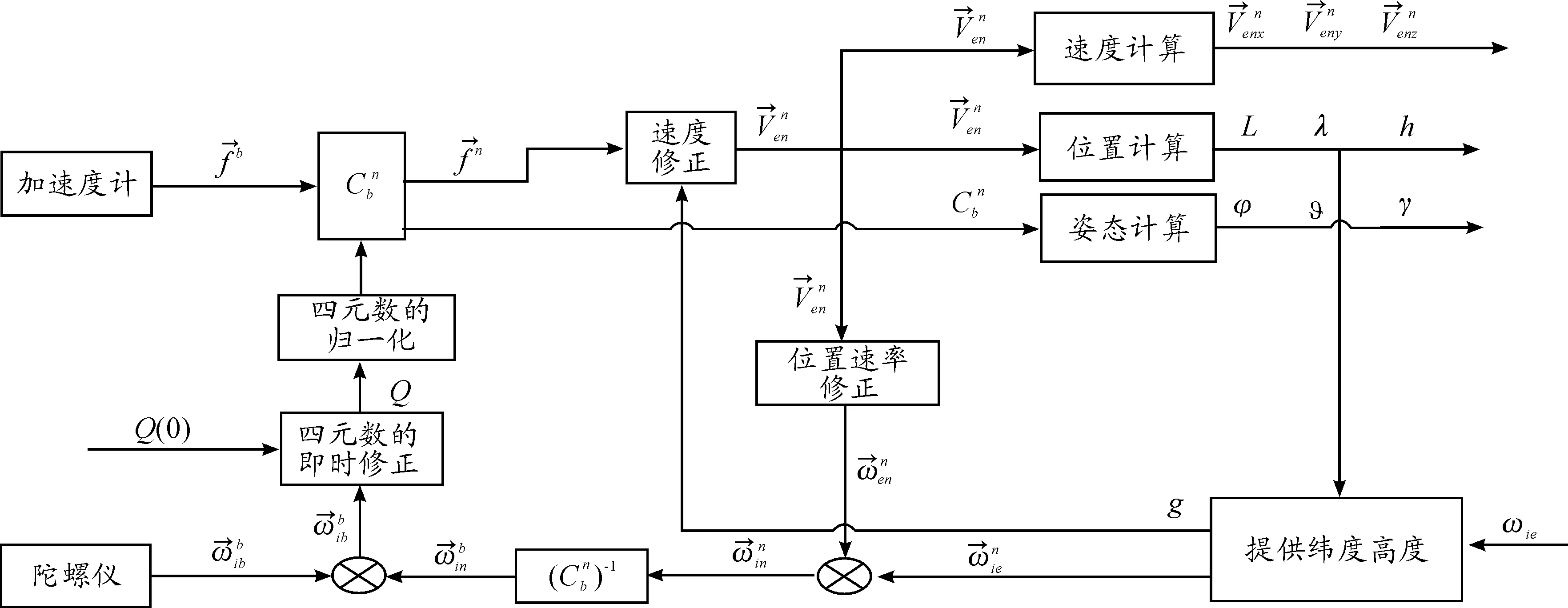
图2 MEMS惯导解算原理
(2)
1.3 无迹卡尔曼滤波原理及实现步骤
在组合导航应用中,通常采用标准卡尔曼滤波算法进行数据融合。标准卡尔曼滤波采用递推计算,计算量小,但其只适用于线性系统。文献[5]对误差方程线性化,舍去高阶项,采用标准卡尔曼滤波进行数据融合,虽然仍能够跟踪弹道轨迹,但误差较大。无迹卡尔曼滤波可直接对非线性系统进行估计,本文针对MIMU/BD组合导航的非线性状态方程,采用无迹卡尔曼滤波(UKF)进行数据融合。
标准卡尔曼滤波是一种线性最小方差估计,而无迹卡尔曼滤波(UKF)是对后验概率密度近似得到的次优估计,二者的实现步骤都基于卡尔曼滤波算法模型,只是UKF的最佳增益阵是由估计值和测量值的协方差求得,而协方差则由UT变换[9]确定(用以描述高斯随机变量在通过非线性变换之后概率分布的一种方法)。该方法在强非线性条件下能够进行有效估计,在MIMU和北斗组合导航误差的非线性状态估计中有更好的效果。
非线性系统的状态方程如式(3)
(3)
其中:f和h是非线性向量函数;Wk和Vk是均值为零的高斯白噪声序列。
UKF的具体实现步骤如式(4)~式(12)所示。
1) 初始化

(4)
2) 计算k-1时刻的2n+1个σ样本点及其权值。
(6)

3) 计算k时刻的一步预测模型,如式(7)、式(8)、式(9)所示:
(7)
(8)
(9)
4) 计算k时刻的一步预测样本点,如式(10)所示。

(10)

5) 计算协方差阵,如式(11)所示。


(11)
6) 计算滤波估计值,如式(12)所示。
(12)
2 系统模型
在大多数应用中,通常不仅对速度、位置等误差进行估计,还要将陀螺的漂移作为系统误差状态的估计量,以获得对陀螺仪随机漂移值的最佳估计值,实现对陀螺漂移的动态补偿。
2.1 组合导航系统状态方程
本文选用测量误差作为状态变量,包括位置误差、速度误差和平台角误差。此外,为更好地进行性能估计,将陀螺的随机漂移误差也作为系统状态量进行估计。
系统状态方程为

(13)
状态量方程为
(14)
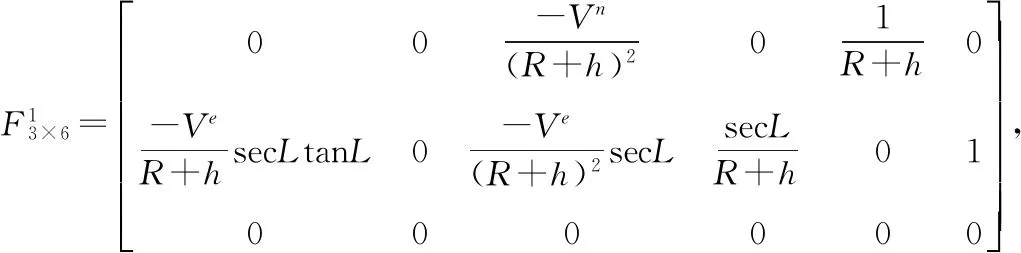
根据文献[8]中的误差方程和陀螺的随机漂移误差,状态矩阵可写成如式(15)所示。
(15)
(16)
激励噪声矢量为
(17)

系统激励输入矩阵为
(18)

2.2 组合导航系统的量测方程
组合导航系统的测量值由位置、速度误差构成。分别为MIMU解算得到的位置、速度信息和北斗接收机接受到的位置、速度信息的差值;卡尔曼滤波的量测方程可由式(19)表示
Zk=HkXk+Vk
(19)
其中:Hk为测量阵;Vk为量测噪声序列。
测量值的选择主要包括两个步骤:
1) MINS解算得位置、速度信息,如式(20)所示
(20)
2) 北斗给出的位置、速度信息,如式(21)所示
(21)
其中:λt、Lt、ht为系统所在的真实位置,VE、VN、VU是东北天地理坐标系下3个方向的真实速度;NE、NN、NU为北斗接收机在东北天地理坐标系下的位置误差;ME、MN、MU为北斗接收机测量的速度误差。结合式(20)、式(21),量测方程可表示为式(22)所示:
(22)
3 算例仿真
为验证该算法在制导火箭弹上的可行性,利用Matlab/Simulink对某型火箭弹的仿真数据进行仿真分析。设计仿真模块,分别为轨迹发生模块,MIMU仿真模块,北斗接收机仿真模块,数据解算模块和数据融合模块。
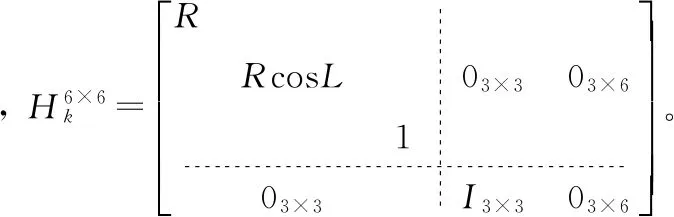
模拟某型火箭弹的方案弹道进行轨迹模块设计,采用六自由度弹道模型生成弹道轨迹,如图3所示。其中OX为飞行距离,OXZ为俯仰弹道,OXY为偏航弹道。火箭弹发射角为45°,飞行时间为127 s,落点距离为35 315.479 m,最大高度为17 117.404 8 m,最大高度时间为56.804 s。
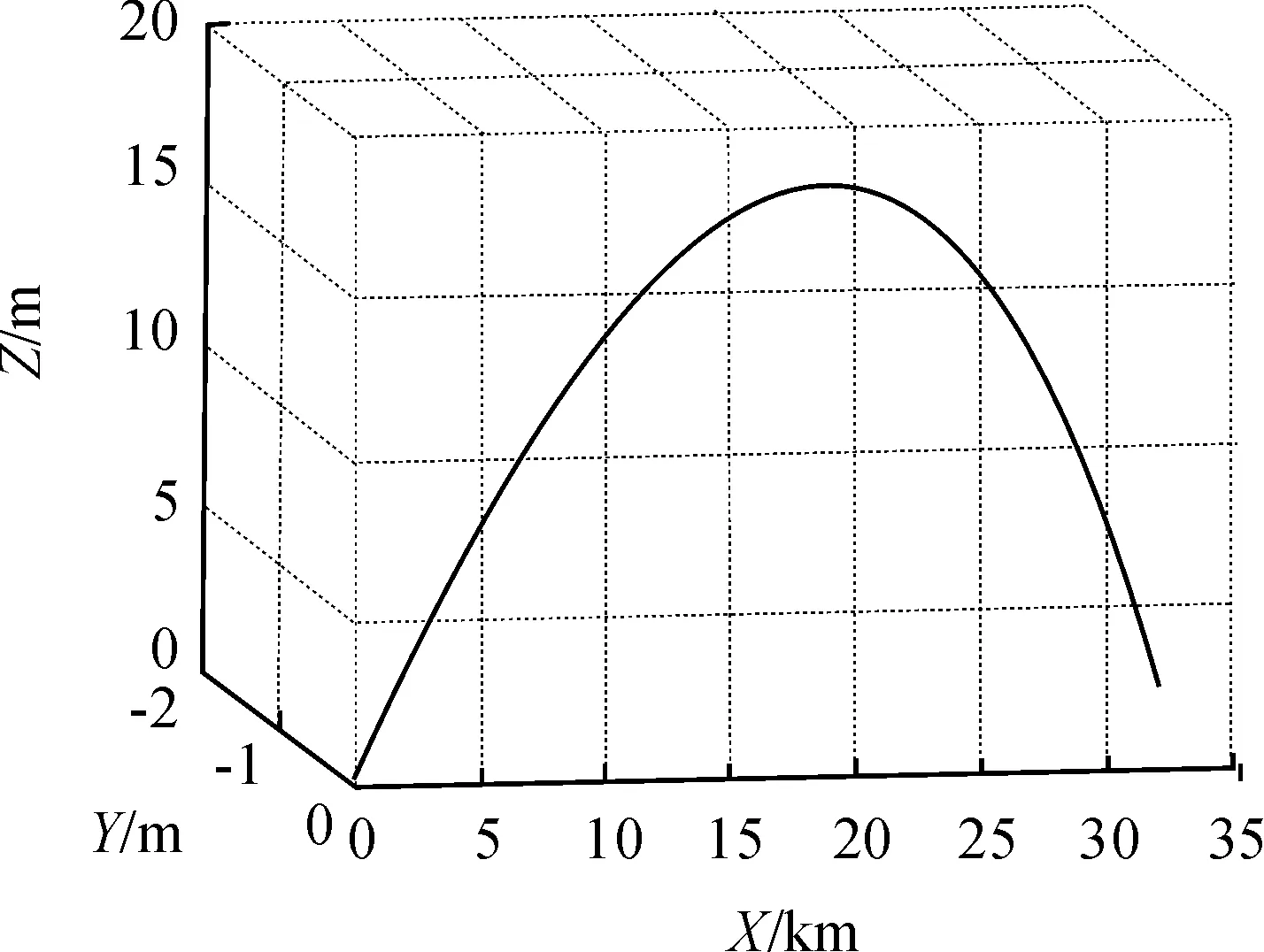
图3 某型火箭弹的弹道轨迹仿真
对于MIMU和北斗接收机的仿真参数,对实验室所采用的某型微陀螺仪和加速度计进行数据采集,预处理后[10-11],得仿真参数如表1所示。
表1 仿真参数设计
数据采样频率为10 Hz,初始位置为北纬32°,东经118°,海拔高度0 m;弹体飞行时间127 s,初始飞行时由于火箭发射等振动冲击较大,一般情况下在出炮口后设备才上电工作,所以本文只对17 s后的数据进行解算分析。
在上述初始条件下,对模型进行仿真分析,进行火箭弹弹道参数测量。测量结果如图4~图8所示。
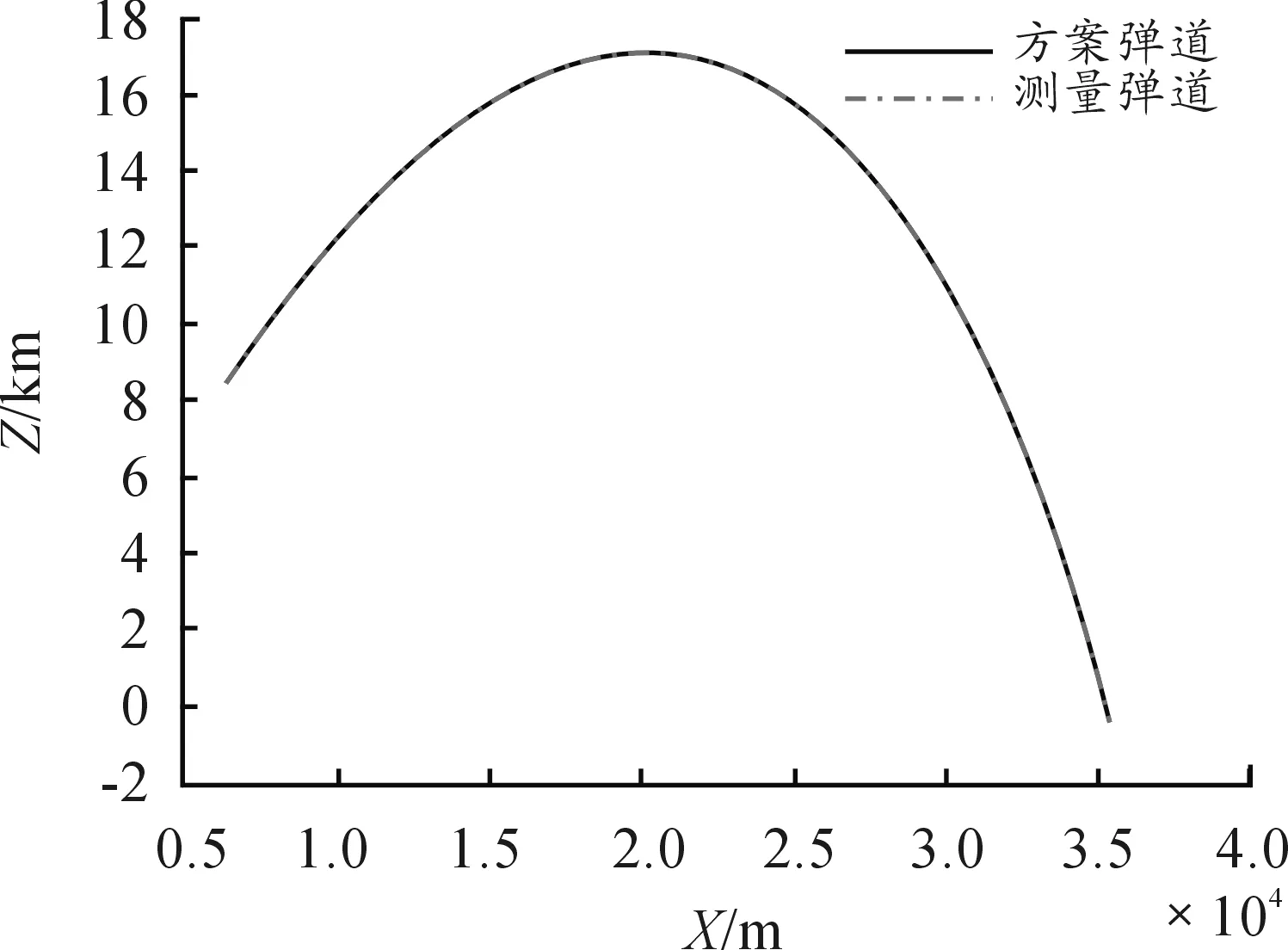
图4 测量弹道和方案弹道
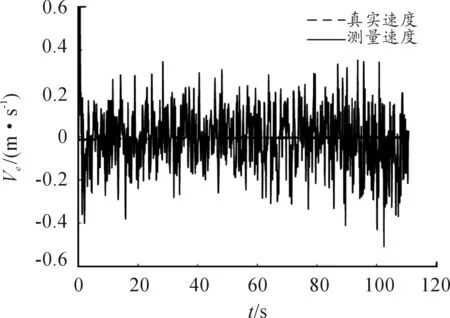
图5 东向速度
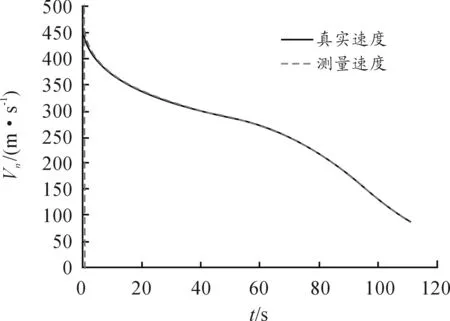
图6 北向速度
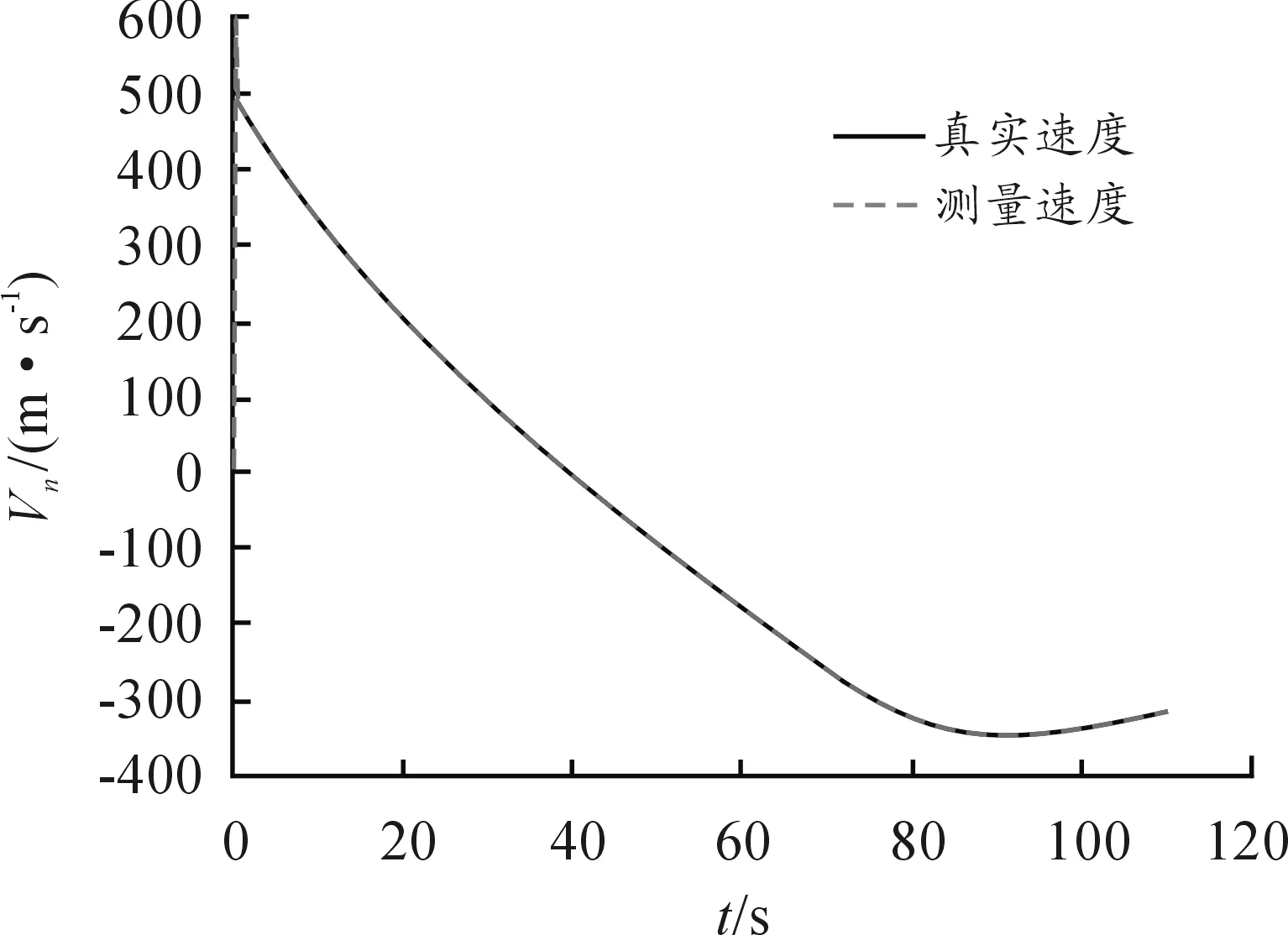
图7 天向速度
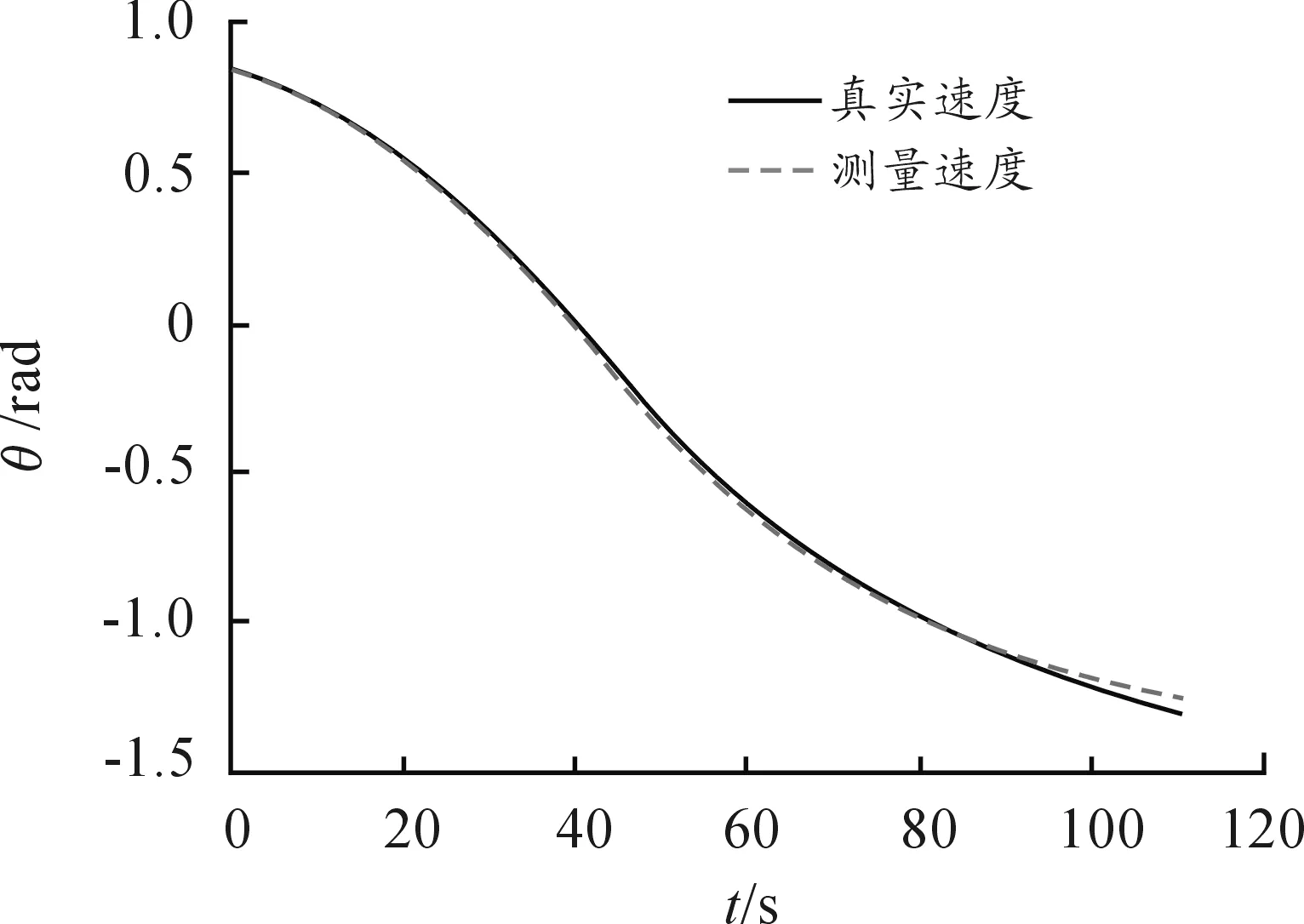
图8 姿态角
图4~图8分别给出了真实的弹道、速度、姿态及其它们的测量值,从其中可以看出利用MEMS/北斗组合方案测量得到的值与真实值大致趋势一致,说明能够对某型火箭弹的弹道参数进行良好的跟踪测量。图9~图14给出了各弹道参数的测量误差。
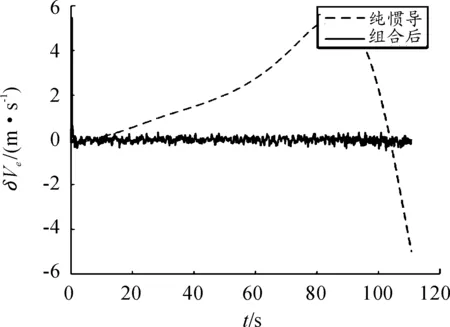
图9 东向速度误差
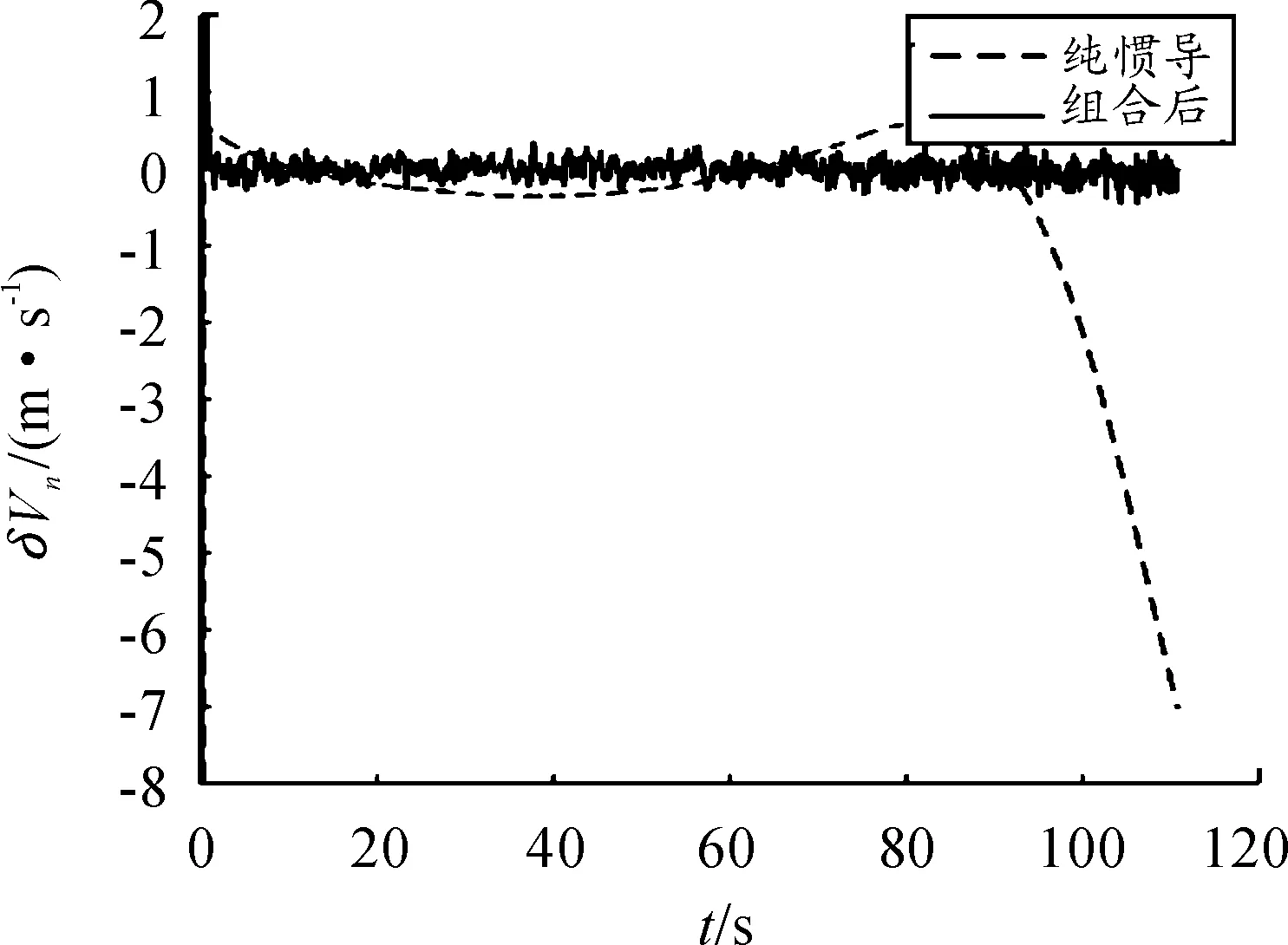
图10 北向速度
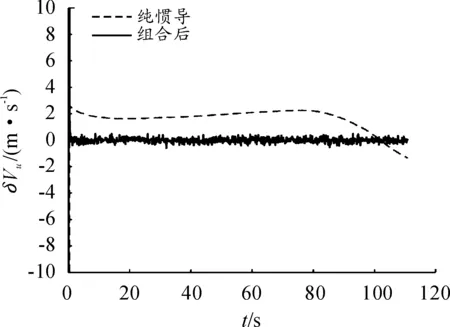
图11 天向速度误差
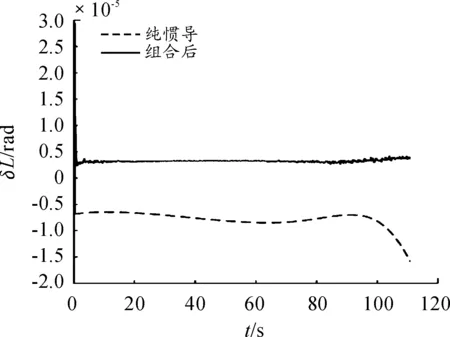
图12 纬度误差
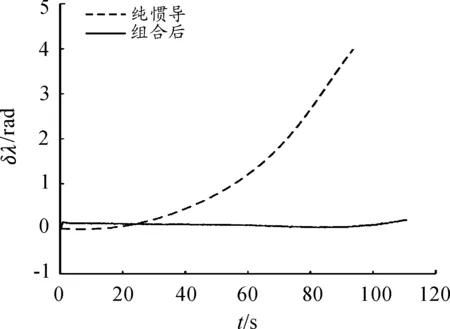
图13 经度误差
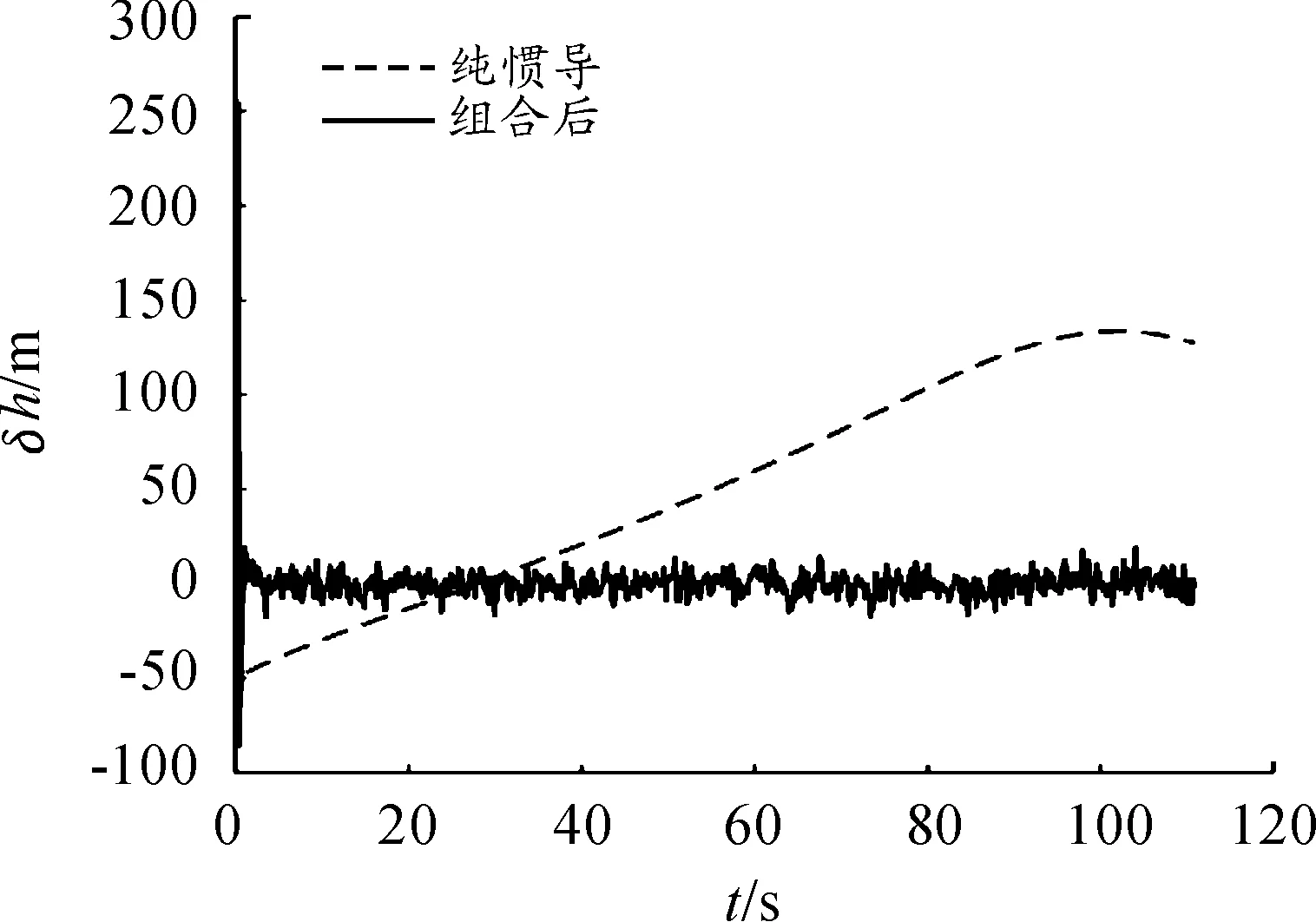
图14 高度误差
图9~图14为在单一MIMU测量和基于UKF组合测量时位置和速度误差图。从其中可以看出,对于某型制导火箭弹弹道参数,在单一MIMU测量下,位置和速度误差随时间增加而不断发散,在弹体飞行的110 s内,东向和北向速度误差发散严重,分别达到5 m/s和7 m/s,高度误差达到150 m;而基于UKF的组合测量方案的结果明显消除了误差发散现象,在弹体飞行过程中,位置误差减小到10 m,速度误差减小到0.2 m/s。二者的对比结果可以明显看出,基于UKF的MIMU/BD组合测量方案和单一MIMU测量方案相比,误差有着数量级的减少,且在弹体飞行时间内误差无明显发散现象。
4 结论
本研究利用北斗辅助微惯性测量单元进行火箭弹的弹道参数测量,利用无迹卡尔曼滤波算法进行数据融合。该方法对MIMU的测量误差进行估计,同时UKF的引入能够直接对非线性系统进行估计,对于提高导航精度有很重要的作用。对某型制导火箭弹弹道参数测量进行仿真,仿真结果表明基于UKF的MIMU/BD组合测量方案能够很好地跟踪弹道轨迹,精确的测量弹道参数,位置精度达到10m,速度精度达到0.2m/s,达到火箭弹发射精度要求,对微惯性器件上弹应用和进一步的稳定性分析有了一定的指导意义。
[1] 杨慧娟,霍鹏飞,黄铮.弹道修正弹修正执行机构综述[J].四川兵工学报,2011(1):7-9.
[2] 宫志华,刘志学,冷雪冰,等.一种光雷组合测量求取高精度弹丸切向速度方法[J].弹箭与制导学报,2015(6):119-122.
[3] 杨慧娟,黄铮,霍鹏飞.基于IMU弹道测量的扩展卡尔曼滤波参数估计算法[J].中北大学学报(自然科学版),2013(3):314-318.
[4] 杨小军,施坤林,汪仪林.基于磁传感器/GPS组合制导飞行弹体的姿态和位置估计[J].兵工学报,2008,29(2):55-55.
[5] 胡光宇,施锦丹,柳朝阳.某型火箭炮低成本弹道修正弹方案优选论证分析[J].弹箭与制导学报,2013(3):129-132.
[6] 高娟,韩惠珍,白军.SINS/GPS紧耦合与松耦合组合导航系统分析[J].四川兵工学报,2011(10):92-96.
[7] 钱杏芳.导弹飞行力学[M].北京:北京理工大学出版社,2011.
[8] 秦永元.惯性导航[M].2版.北京:科学出版社,2014.
[9] 秦永元,张洪钺,汪淑华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,2015.
[10] 周雪梅,吴简彤,何昆鹏,等.捷联惯性导航系统的误差分析[J].声学与电子工程,2003(1):39-41.
[11] 金学军.基于最小二乘拟合的外弹道测量数据野值剔除方法[J].四川兵工学报,2011,32(1):20-23.
(责任编辑周江川)
ResearchonRocketProjectileBallisticParametersMeasurementBasedonMEMS/BD
ZHANG Haoran, YI Wenjun, GUAN Jun, YUAN Dandan, SUN Lei
(National Key Laboratory of Transient Physics, Nanjing University of Science and Technology, Nanjing 210094, China)
The trajectory of the rocket projectile can be calculated using the BD system measurement, while the inertial parameters can be solved through MIMU.The date fusion based on the unscented kalman filter (UKF) is carried out to deal with the parameters from the BD system and MIMU, with the purpose of increasing accuracy.This paper introduces the measurement method of trajectory parameter, and designs the unscented kalman filter, and the six-degree-of-freedom simulation data of a certain guided rocket is used to validate the integrated navigation scheme.The simulation results show that the MIMU/BD integrated measurement method based on UKF can effectively measure the trajectory parameters of rocket projectile, and the data fusion through the UKF filter can eliminate the data divergence produced by using the inertial navigation alone.Meanwhile, the measurement accuracy is completely satisfied towards the navigation requirement of guided rocket projectile.All these provide the theoretical support for the application of micro inertial devices in the projectile.
rocket projectile; trajectory parameter measurement; MIMU; Beidou receiver;unscented Kalman filter
2017-04-25;
:2017-05-10
:国家自然科学基金项目(11472136)
张浩然(1993—),女,硕士研究生,主要从事MEMS惯性测量技术研究。
易文俊(1970—),男,教授,博士生导师,主要从事弹箭外弹道学及其控制技术研究。
10.11809/scbgxb2017.09.009
format:ZHANG Haoran, YI Wenjun, GUAN Jun, et al.Research on Rocket Projectile Ballistic Parameters Measurement Based on MEMS/BD[J].Journal of Ordnance Equipment Engineering,2017(9):41-47.
TN967.2
:A
2096-2304(2017)09-0041-07
本文引用格式:张浩然,易文俊,管军,等.基于MEMS/北斗的火箭弹弹道参数测量方法[J].兵器装备工程学报,2017(9):41-47.
