无人机控制律的设计与仿真
2017-09-23肖沿海
肖沿海
(江南机电设计研究所,贵州贵阳,550000)
无人机控制律的设计与仿真
肖沿海
(江南机电设计研究所,贵州贵阳,550000)
本文是在无人机控制技术领域的一个基础性的探索研究。由于本人是首次接触飞行控制这一崭新的领域,且本系在该领域前期的科研积累很少,虽在导师的指导下克服了重重困难,取得了一定的进展,但就其深度而言,还尚显肤浅,在某些问题的研究上还未深入到飞控的本质。
无人机;控制率;控制技术
1 飞控系统设计的基本思路
常规无人机的飞行控制系统是一个多通道控制系统,即多输入多输出的控制系统。其输入量为传感器所采集到的无人机状态值,输出量为无人机状态方程的控制变量—舵值和发动机推力。
通常而言,我们要想控制飞机的运动必须首先考虑控制它的角运动,使其姿态发生变化,然后才能使它的重心轨迹发生相应的变化。因此,我们把以姿态角信号反馈为基础构成的飞行姿态稳定和控制回路(即内回路)称之为飞控系统的核心控制回路。同时,为了提高角控制系统的动态性能,我们还应该采用由角速率反馈所构成的阻尼回路来弥补现代高空高速无人机自身阻尼的不足,从而改善其姿态运动的稳定性。但有一点值得注意的是,阻尼系统只对短周期运动起良好的阻尼作用,而对于长周期运动的阻尼作用却是很弱的。
飞控系统的内回路是飞行高度、航向、航迹等外回路控制的基础。其中,无人机的高度保持就是在俯仰角控制内回路的基础上,引入气压高度反馈信号构成飞行高度稳定外回路来实现的;航向控制与稳定是通过将航向信号反馈到滚转控制通道,构成飞行航向控制外回路来实现的;自主导航飞行是在飞行导航控制回路的基础上,引入侧偏距反馈构成航迹控制外回路来实现的。
一般来说,无人机的飞控系统通常包括俯仰、航向和横滚三个控制通道(有的系统只包括俯仰通道和横滚通道),每个通道都由一个控制面来控制。由于在横滚和航向通道之间常常存在着一定的交联,这就要求我们在设计飞控系统时一般需要考虑各通道间的独立性和关联性。
为了便于飞控系统的设计,我们根据无人机沿纵向平面的对称性,通常可以将飞行控制在一定条件下分为相对独立的纵向控制通道和横侧向控制通道。其中,纵向控制通道可以稳定与控制无人机的俯仰角、高度、速度等;横侧向控制通道可以稳定与控制无人机的航向角、滚转角和偏航距离等。
作为整个飞控系统的核心,飞行控制律选取和设计的好坏往往会直接影响到整个飞控系统的性能。考虑到控制角运动是控制轨迹运动的基础,我们在具体设计飞行控制律时也应该先从控制角运动入手,首先保证角运动控制回路的性能,然后在此基础上进行轨迹运动控制回路的设计。
因此在本文中,我们针对纵向系统,首先研究无人机俯仰姿态保持/控制模态控制律的设计,然后再研究其高度保持/控制模态下控制律的设计问题;针对横侧向系统,则先研究了倾斜姿态保持/控制模态控制律的设计,然后对航向保持/控制模态下控制律的设计问题进行了探讨。
在飞行控制律设计的初步阶段,我们可以暂不考虑伺服回路、传感器和等效时延等非线性因素对闭环系统的影响,充分利用相关经典控制理论,合理的设计出控制器的结构与参数,使系统的时域响应和频域响应都能达到相应技术指标的要求;然后,再考虑系统的非线性因素,对参数重新进行调整。实践证明,这种设计方法简单易行,是工程实际中比较容易操作的设计方法。
由于无人机的动态特性会随着飞行条件(如高度、速度等)的不同而产生较大的变化,所以,我们有必要将整个飞行包线所在的区域划分成许多不同的小区域,然后分别针对每个不同的区域设计参数不同控制器,或者我们也可以将控制律设置成可随行条件变化的调参增益。在实际飞控系统的设计中,我们通常需要对飞行区间进行更为细致的划分,而且应该选取较多的典型状态点作为设计控制器的基准点。我们在这里仅选取了少量的状态点,其目的是为了从一个小的侧面对所设计的控制律进行仿真验.
2 控制律的设计与仿真

图1 PID控制下高度阶跃响应(A点)
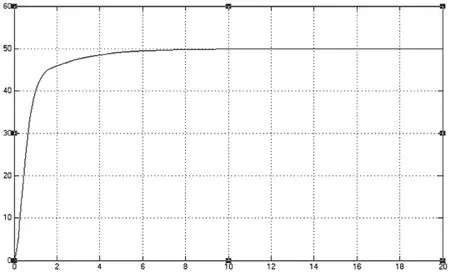
图2 PID控制下高度阶跃响应(B点)
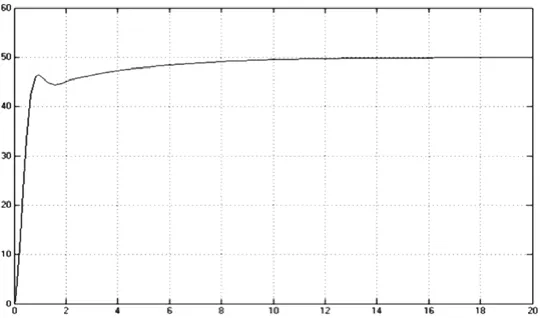
图3 PID控制下高度阶跃响应(C点)
在设计基于PIO控制的无人机高度控制系统时,我们通常只需保持原来所设计的俯仰姿态回路不变,然后在此基础上设计基于PID控制的高度保持/控制外回路就可以了。
如前文所述,我们仍以中空和高空域中的状态点A和C作为基准状态点,分别设计了基于常规PID和智能PID的高度控制器。然后将所设计好的控制器分别用于A点附近的B点和C点附近的D点。全部仿真结果分别如图1-4所示。
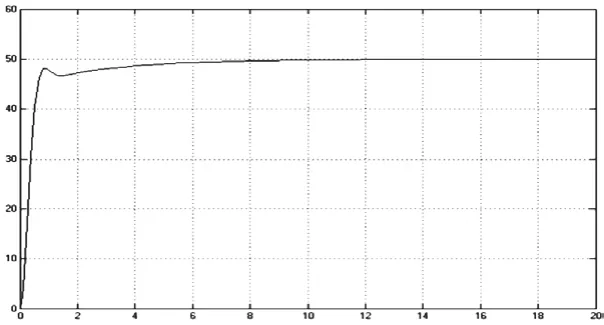
图4 PID控制下高度阶跃响应(D点)
3 结束语
本文以某型固定翼无人机为研究对象,主要研究了其飞控系统控制律的设计问题,分别设计了基于常规PID控制和智能PID控制策略的飞行控制律,并进行了大量的仿研究。仿真结果表明:基于经典PID控制律结构简单,容易实现,但这种传统的设计技术需要反复选择大量的设计参数,需要借助于大量的直观的经验,按照闭环回路来依次选择控制系统的结构和参数。
[1]许陈元,李春涛.无人机快速着陆控制律设计及仿真验证[J].计算机仿真,2016,(07):141-146.
[2]曹南,苏媛.简化模型下的舰载无人机着陆控制律设计与仿真[J].飞机设计,2015,(02):11-14.
Design and simulation of uav control law
Xiao Yanhai
(jiangnan electromechanical design institute, Guiyang Guizhou, 550000)
This paper is a basic exploration and research in the field of uav control technology. Because I was the first time contact flight control of this new field, and the department in the accumulation of the early stage of the research in this field is very few, is under the guidance of a mentor to overcome the difficulties, has made certain progress, but in terms of its depth, and also is shallow, on some issues of research has not go deep into the essence of flight control.
uav; Control; The control technology
