造船门式起重机安装过程刚性支腿偏移量研究
2017-09-23郝振兴孙绍琳魏兴杜庆升李豪
郝振兴,孙绍琳,魏兴,杜庆升,李豪
造船门式起重机安装过程刚性支腿偏移量研究
郝振兴1,孙绍琳2,魏兴2,杜庆升2,李豪2
(1.大连船舶重工集团装备制造有限公司,辽宁大连116000;2.大连益利亚工程机械有限公司,辽宁大连116025)
提出了造船门式起重机安装过程中刚性支腿水平偏移量的问题,分析了产生此问题的原因,通过具体实例提出了解决此问题的方法,并根据具体实际安装工作和设备后续的使用情况验证了这种方法是可行的。
造船门式起重机;安装;刚性支腿
1 安装过程中刚性支腿的水平偏移问题
作为一种大型起重设备,造船门式起重机广泛应用于船舶工业中。此种起重机具有起重量和跨度大、起升高度高等特点[1]。
如图1所示,造船门式起重机主要由起重机运行机构1、刚性支腿2、维修起重机3、下小车4、主梁5、上小车6、柔性支腿组成7.其中,刚性支腿2、主梁5和柔性支腿7组成的门架为造船门式起重机的主要钢结构。

图1 造船门式起重机构造示意图
造船门式起重机安装主要有两种方式:一种是使用浮式起重机、桅杆起重机等大起重量设备安装;另一种是使用门式提升塔架安装。
门式提升塔架具有起重量大、安装过程连贯、通用性强、安全系数高等特点,在造船门式起重机的安装作业中较为常用。但是,由于塔架的体积比较大,致使设立位置与起重机的轨道距离较远,被安装起重机的主梁在安装过程中的受力与正常工作状态不同。即起重机在正常工作时,主梁为简支梁,而安装过程中为简支悬臂梁,如图2、图3所示。主梁端部的下挠将直接影响门架的最终成型精度。
图2 正常工作工况门架理论状态

图3 安装过程中门架的变形
2 门架刚性支腿水平精度的保证措施
2.1 门架刚性支腿水平预偏量
造船门式起重机在设计时,考虑到不同载荷状态下,刚、柔支腿并非一直处于垂直状态,预留出一定的反变形,将门架刚性支腿设计成在空载状态下成略向跨外倾斜的形式,而柔性腿略向跨内倾斜,如图4所示。因此,造船门式起重机刚性腿与主梁的理论夹角小于90°,柔性腿与主梁的夹角大于90°.
主梁提升的过程中,在门架自重作用下,主梁两端下挠变形,刚性支腿与主梁的夹角变大,如图2所示。在这种状态下进行门架的最终焊接将直接影响门架的最终成型精度。即如果在此状态下进行主梁与刚性支腿的焊接,则在正常工作时,门架无法达到图4的状态。
为了解决此问题,且不改变刚性腿与主梁的既定接口尺寸,可在图5状态下完成主梁与刚性支腿的连接,使刚性支腿侧大车运行机构中心向内侧偏离轨道中心L距离。

图5 保证精度的刚性腿与主梁连接状态
通过对门架安装工况的计算,得到主梁端部的变形量和变形角度,即可计算出图5中的L值[2,3]。2.2主梁提升吊点的选择
2.2.1 主梁提升吊点的初选
可根据安装场地的客观条件,初步选择塔架合适的树立位置并布置揽风绳锚点的位置,继而确定主梁上提升点的位置。
塔架应尽量靠近刚、柔腿轨道,这样在主梁提升过程中,可以缩短悬臂部分的长度,减少下挠量。
再结合刚、柔腿和主梁的重量来调整上、下小车位于主梁上的位置,使两付塔架的提升力基本相同。
塔架和主梁上提升吊耳的位置均以刚、柔腿的中心线为基准。
2.2.2 主梁提升吊点的最终确定
为了提高吊耳处主梁各构件的局部强度,应使吊耳处于主梁内部有较强隔板的位置。根据2.2.1中选择的位置进行调整,再根据调整后的结果确定上下小车停留在主梁上的位置,从而确定主梁上吊点和提升过程中的最终状态。
35 #600t造船门式起重机的安装实例
大连船舶重工集团装备制造有限公司负责施工的5#600 t(600 t×188 m)造船门式起重机的主要参数如下:
总起重量:600 t
上小车起重量:2×300 t
下小车起重量:400 t
上小车起升高度:90 m
下小车起升高度:82 m
上小车满载最大起升速度:3 m/min
下小车满载最大起升速度:3 m/min
最大工作风速:21 m/s
根据2.2的原则,将两副塔架分别设置在距离刚性腿67 m,距离柔性腿57 m的位置。如图6所示。
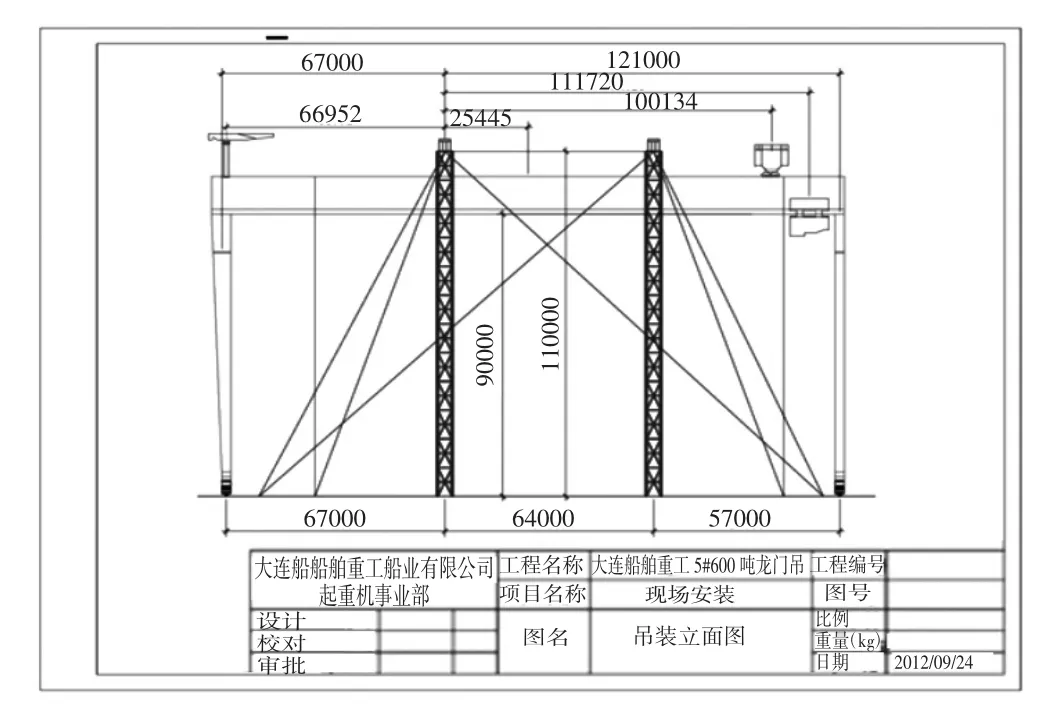
图65 #600t造船门式起重机安装吊点位置
3.1 起重机自身设计决定的刚性腿状态
该起重机跨度188 000 mm,主梁制造拱度851 mm,主梁梁底标高90 000 mm.主梁与刚性支腿接口处具有一定的斜度值,如图7所示。

图7 主梁与刚性支腿连接处
(2)门架设计构造要求需要刚性腿刚性腿向跨外的倾斜值为100 mm.
(3)为了使刚性腿顶部贴合主梁底部,须将刚性腿跨外侧切除80 mm.
由于C项,刚性腿顶端切斜,引起的刚性腿在与主梁连接后,刚性腿的转角α1=arctan=0.527°.
由于上述因素引起的刚性腿末端倾斜值L1为:

3.2 有限元分析
应用软件ANSYS11.0进行有限元计算分析主梁在提升过程中的状态。
根据实际情况,主要考虑如下几种载荷:主梁、刚性支腿、柔性支腿、上小车、下小车等主要部件的自重,根据不同工况选择性施加。在自重前乘以起升冲击系数。
对吊点施加三个方向的位移约束,放开三个方向的旋转约束。刚性支腿、柔性支腿、上小车、下小车等主要部件的自重作为质量点施加在相应的位置。如图8所示。

图8 主梁有限元模型及约束和载荷
得到主梁的位移云图,如图9所示。
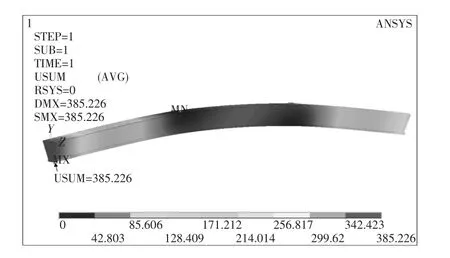
图9 主梁位移云图(放大30倍)
得到主梁端部位移为385.226mm,主梁端部转角近似值α3为:

由上述因素引起的刚性腿末端倾斜值L2为:

综上,主梁提升吊耳最终修正值L为:

主梁提升吊耳的位置应在原67 000 mm(距离刚性腿轨道)的基础上再增加1 216.94 mm,才能保证刚性腿末端(车轮)恰好位于轨道上方,此时刚性腿才能够与主梁末端贴合,同时车轮又恰好位于轨道上。
4 结论
利用上述方法制定了安装方案,根据此方案安装的大连船舶重工集团有限公司5#600t造船门式起重机于2015年初落成,如图10所示。经过近一年的使用,未见任何异常,证明了此种方法的正确性。

图10 使用中的5#600t造船门式起重机
[1]刘玉君,汪骥,武艳斌.超大型总段工艺装备的研究[D].大连:大连理工大学,2009.
[2]中国机械工业联合会.GB/T3811-2008起重机设计规范[S].北京:中国标准出版社,2008.
[3]中华人民共和国建设部.GB50017-2003钢结构设计规范[S].北京:中国计划出版社,2003.
Research on Rigid Leg Offset During Installation of Shipbuilding Gantry Crane
HAO Zhen-xing1,SUN Shao-lin2,WEI Xing2,DU Qing-sheng2,LI Hao2
(1.Dalian Shipbuilding Industry Group Equipment Manufacturing Co.,Ltd.,Dalian Liaoning 116000,China;2.Dalian Yiliya Construction Machinery Co.,Ltd.,Dalian Liaoning 116025,China)
The problem of the deviation of the rigid leg in the process of shipbuilding gantry crane installation is proposed,analyzes the causes of this problem,put forward the method to solve the problem by an example,and according to the crane installation and the use of equipment,it shows that this method is feasible.
shipbuilding gantry crane;installation;rigid leg
TH213.5
A
1672-545X(2017)07-0153-03
2017-04-23
郝振兴(1982-),男,辽宁凌源人,本科,助理工程师,主要从事造船及相关方面的大型装备的设计、安装和制造工艺研究。
