航空器轨迹变点检测与判识技术研究
2017-09-19苏志刚李志强郝敬堂
苏志刚,李志强,郝敬堂
(中国民航大学a.天津市智能信号与图像处理重点实验室;b.中欧航空工程师学院,天津 300300)
航空器轨迹变点检测与判识技术研究
苏志刚a,b,李志强a,郝敬堂b
(中国民航大学a.天津市智能信号与图像处理重点实验室;b.中欧航空工程师学院,天津 300300)
航空器飞行阶段的有效划分是支撑航空排放主动监测的重要技术手段,采用变点检测与判识的方法可有效地实现对航空器飞行阶段的划分。本研究根据多变量T2统计量的特点,在数据整体参数一致性假设下,提出了一种采用顺序双滑窗的航空器轨迹变点检测与判识的方法。仿真与实验结果表明,该方法对窗口长度较为敏感,在适宜的窗口长度下可有效地解决轨迹的变点检测问题。根据航空器轨迹的特点,选择适当的窗口长度前提下,本方法是一种有效的变点检测与判识方法。
航空排放;排放监测;航迹分割;变点检测;T2统计量
国际民航组织(ICAO,international civil aviation organization)预测2050年航空排放将比2010年增长300%左右[1],因此,在国际气候变化谈判中,民用航空的节能减排成为其前沿问题和各国斗争的焦点之一。中国民航2016年运输总周转量比上年同期增长12.8%,随着运输量的增加,中国民航也面临严峻的航空节能减排压力,推进民航节能减排成为近年来中国民航管理部门的重点工作。民航节能减排需要有效的主动核查与监测手段。根据航空器不同飞行阶段的能耗模型,结合航空器轨迹信息,可以实现对航空器排放的主动监测。因此,基于航空器轨迹信息的飞行阶段划分技术是实现航空排放主动监测任务的核心技术之一。
在民航监视领域,二次雷达系统和广播式自动相关监视(ADS-B,automatic dependent surveillance-broadcast)系统可获得航空器呼号、经度、纬度、高度、地速、航向和升降率等信息。利用与航空器轨迹相关的高度、地速和升降率等信息可进行飞行阶段的划分。目前航空器飞行阶段的划分主要涉及对特定飞行阶段的提取和对全航程飞行阶段的划分两类。
对特定飞行阶段的提取主要是用于研究在特定飞行阶段,如爬升、巡航和下降等,航空器所涉及的飞行动作和姿态的变化、燃油消耗[2]和噪声[3]等问题,相应飞行阶段的提取通常采用变点分析方法[4]、遗传算法[5]和隐马尔可夫模型[6]等方法实现。对全航程飞行阶段的划分主要采用支持向量机方法[7-8],该方法依赖人工获取的标签,仅是对历史数据的回顾性分析。单窗口Hotelling’s T2统计量方法可对航迹中的变点进行检测[9-10],现有方法重点在变点检测上,一旦检测出变点就停止,无法实现连续地变点检测。双窗口距离测度方法通过比较两个窗口内数据的差异性来完成变点检测[11],但该方法未能有效解决数据更新问题,也无法实现对实时航迹的变点检测。因此,现有对特定飞行阶段的提取和对全航程飞行阶段划分的研究成果均不具备对航迹数据实时处理的能力,无法为航空排放的主动监测提供实时的阶段划分。
本文为解决航空器飞行阶段实时划分问题,根据飞行参数特点,提出轨迹的变点检测方法。该方法利用民航监视系统提供的航空器高度、地速及升降率等信息,采用顺序双滑窗的方式对航迹数据进行切割,在一致性假设条件下计算双窗口数据的多变量Hotelling’s T2统计量,通过 Hotelling’s T2统计量是否超过门限值来检测变点,并采用最大似然估计(MLE,maximum likelihood estimation)方法确定变点的位置。最后对仿真数据和B737-800航线数据进行了实验分析。
1 问题描述
航空器航迹信息中的高度、地速和升降率可用于描述飞行阶段,设航空器航迹在第n个位置点的测量矢量为

其中:hn、vn和rn分别表示航空器在第n个位置点的高度、地速与升降率的测量值。由于测量矢量受到诸多因素的影响,可以假设其服从多维高斯分布。序列{xn′}反映了航空器的航迹,可利用其进行相应的变点检测。
由于序列{xn′}具有时间相关性,对于采用独立样本进行变点检测的方法不利,因此需采取差分或对数化的方式消除样本间的时间相关性,先对原始数据一阶差分处理,即

本研究将根据差分序列{xn}进行变点检测与变点位置估计。
航空器航迹变点是顺序两个飞行阶段的转换点,即变点前后的样本在统计特征上存在差异,利用此差异能够进行变点存在与否的检测。
基于上述考虑,可以顺序地建立两个数据窗口,相应的数据矩阵分别为

其中:n1和n2分别为两个窗口的数据起始位置;l1和l2分别为两个窗口的数据长度。由于建立的是顺序滑动窗口,所以,n2=n1+l1。设总体数据的协方差矩阵为C,数据矩阵W1的均值矢量与协方差矩阵分别为μ1和C1,数据矩阵W2的均值矢量与协方差矩阵分别为μ2和C2,相应的估计分别为
航空器航迹变点检测的核心问题就是判断两窗口内数据W1和W2的均值矢量是否发生显著变化。
2 变点检测模型
根据两个窗口数据W1和W2,在一定显著度水平α下构建假设检验

式(9)假设检验问题的原假设即为所有变量的均值在两个窗口内都相等,备择假设为至少有一个变量的均值不相等。在原假设H0条件下,相应的Hotelling’s T2统计量为

其中,符号Cov(·)表示协方差运算。在样本独立条件下

若两窗口数据W1和W2协方差矩阵和总体的协方差矩阵相等,即C1=C2=C,则相应的合并协方差矩阵为


显然,式(13)只是在窗口数据W1和W2具有相同协方差矩阵条件下的特例。
式(10)中的Hotelling’s T2统计量的分布为[12]

其中:d=3是式(1)中数据矢量的维数。
在原假设H0条件下,由显著度水平α确定的门限为c,则当T2>c时,拒绝原假设H0,判定备择假设H1成立,即至少有一个参数的均值在窗口数据W1和W2中发生了显著变化,则判决有变点发生,其中窗口数据W2中可能存在变点。
3 变点位置估计
当备择假设H1成立时,窗口数据W1和W2属于两个不同均值的总体,即数据W2中可能存在变点。假设变点发生在 W2中的第 k(k=1,…,l2)个数据点,则

其中:μ21、C21和 μ22、C22分别为变点前后的序列均值矢量与协方差矩阵。
考虑到变点有可能发生在k=1位置,因此在数据W2前补充2d个数据,即[xn2-2d,…,xn2-1]。参考式(10)可得

当k处于真实变点位置时,k点前后数据间的差异性最大,即式(16)中的T2(k)取最大值,因此

4 数据窗口长度选择
两窗口数据长度l1与l2的大小会影响Hotelling’s T2统计量的变点检测性能。较长窗口有利于保持数据统计特征的稳定性,但对于相距较近的变点检测造成困难,可能会导致漏检。较短窗口能较好地刻画航迹参数变化特征,但易受到随机因素的影响,虚警率较高。在一般的变点检测问题中,为了满足样本有效性,数据窗口的长度至少要满足l1>2d,l2>2d,其中d是参数的维度。在航空器航迹变点检测中,窗口长度的选择需充分考虑航空器航迹变化的特点,尽可能地选择较长的窗口,本文主要以航空器阶段持续时间和ADS-B接收机数据更新时间来选择窗口长度。
航空器的起、降阶段主要在相对地面高度(AGL,altitude above ground level)3 000 ft(1 ft=0.304 8 m,下同)以下空域。在此空域内,航空器主要涉及慢车、起飞、爬升和进近4个状态,ICAO对各状态持续时间的建议参数如表1所示。由表1可见,在AGL 3 000 ft以下空域内,状态持续时间最短的起飞过程也需0.7 min,即42 s。
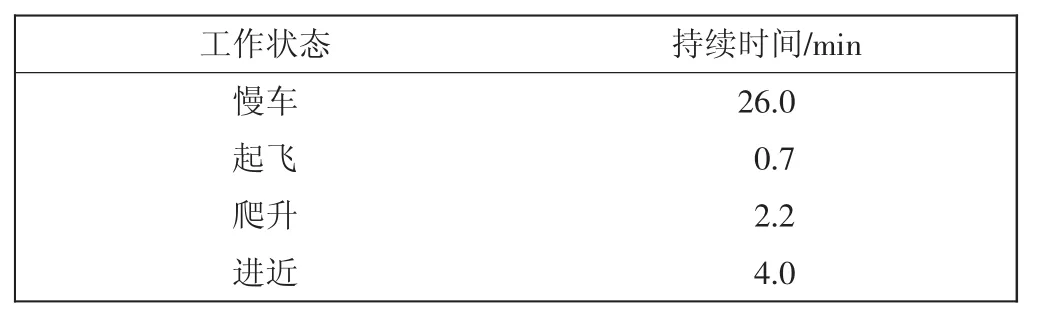
表1 起降阶段各状态持续时间Tab.1 Duration of each stage of taking-off and landing
在AGL 3 000 ft以上空域,航空器逐渐爬升进入巡航阶段。在巡航阶段时,航空器会因冲突、天气等原因进行高度层的调整。根据中国民航高度层划分规则,同方向高度层间的最小垂直间隔为2 000 ft,以在30 000 ft高空巡航的总重50 t的B737为例,当进行高度层迁徙时,升降率为2 000 ft/min,则该航空器至少需要1 min完成邻近高度层间的变迁。所以,航空器的状态持续时间均不小于0.5 min。
ADS-B地面站所提供的航迹信息为每0.5 s更新一次,即在0.5 min内可提供60组数据,因此窗口的长度设置为

在每次变点检测后,后续的检测将以本次检测变点位置为起始重新建立窗口。
5 实验结果
本部分将分别利用仿真数据及实际记录的航迹数据验证本文提出方法的有效性。考虑仿真数据具有相同协方差矩阵

生成三维正态数据矢量1 000条,其中数据矢量的3个分量AD_hn、AD_vn和AD_rn分别模拟航空器爬升过程的飞行高度、地速和升降率等参数的一阶差分。假设在仿真数据中设置6个变点,相应的位置分别为第 301、501、601、801、831 和 881 时刻,其中变点最小间隔为30。因此,相应的变点将仿真数据分割为7段,每段数据的均值情况如表2所示。
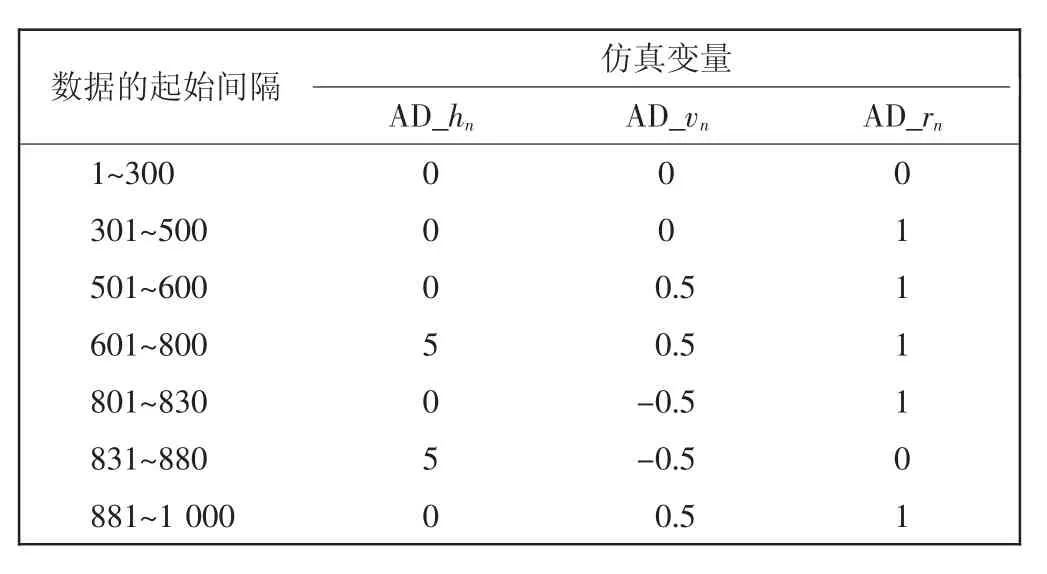
表2 7段仿真数据的起始间隔及其对应仿真变量Tab.2 Mean vectors of 7 segments simulation data
首先研究显著度水平对变点检测性能的影响。设置两个顺序滑动窗口长度l1=l2=30,仿真数据的Hotelling’s T2统计量曲线如图 1(a)所示,统计量的几个峰值位置准确地标识出变点的位置。将图1(a)中虚线框内区域放大后,如图1(b)所示,随着显著度水平α的减小,Hotelling’s T2统计量的检测门限也相应提高,从而降低了虚警概率;当α>10-3时,能准确检测出所有变点,但存在虚警;当α≤10-6时,可以有效地抑制虚警的发生,但可能存在漏检。因此显著度水平取10-5≤α≤10-3。
其次研究窗口长度对变点检测性能的影响。设置等长的两滑动窗口长度(l1=l2)为不同值时,Hotelling’s T2统计量曲线如图2所示。由图2可见,随着窗口长度的增大,Hotelling’s T2统计量在数值上增大,且峰的宽度加大,使得变点的分辨能力降低,可能造成变点的漏检。窗口长度减小,Hotelling’s T2统计量在数值上减小,且峰的宽度变窄,分辨变点的能力提高,但由于在峰值数值上的减小,可能会导致无法超过门限,也会产生漏检。因此,窗口长度的选择具有依赖于实际数据的特点。
对仿真数据变点判识的结果如图3所示。由于设计仿真数据的变点最小间隔为30,因此,设置窗口长度为l1=l2=30,显著度水平α=10-3,判识出的变点位置由图中虚线表示。由图3可见,本文所提出的方法准确地检测出6个变点,并估计出相应的位置。
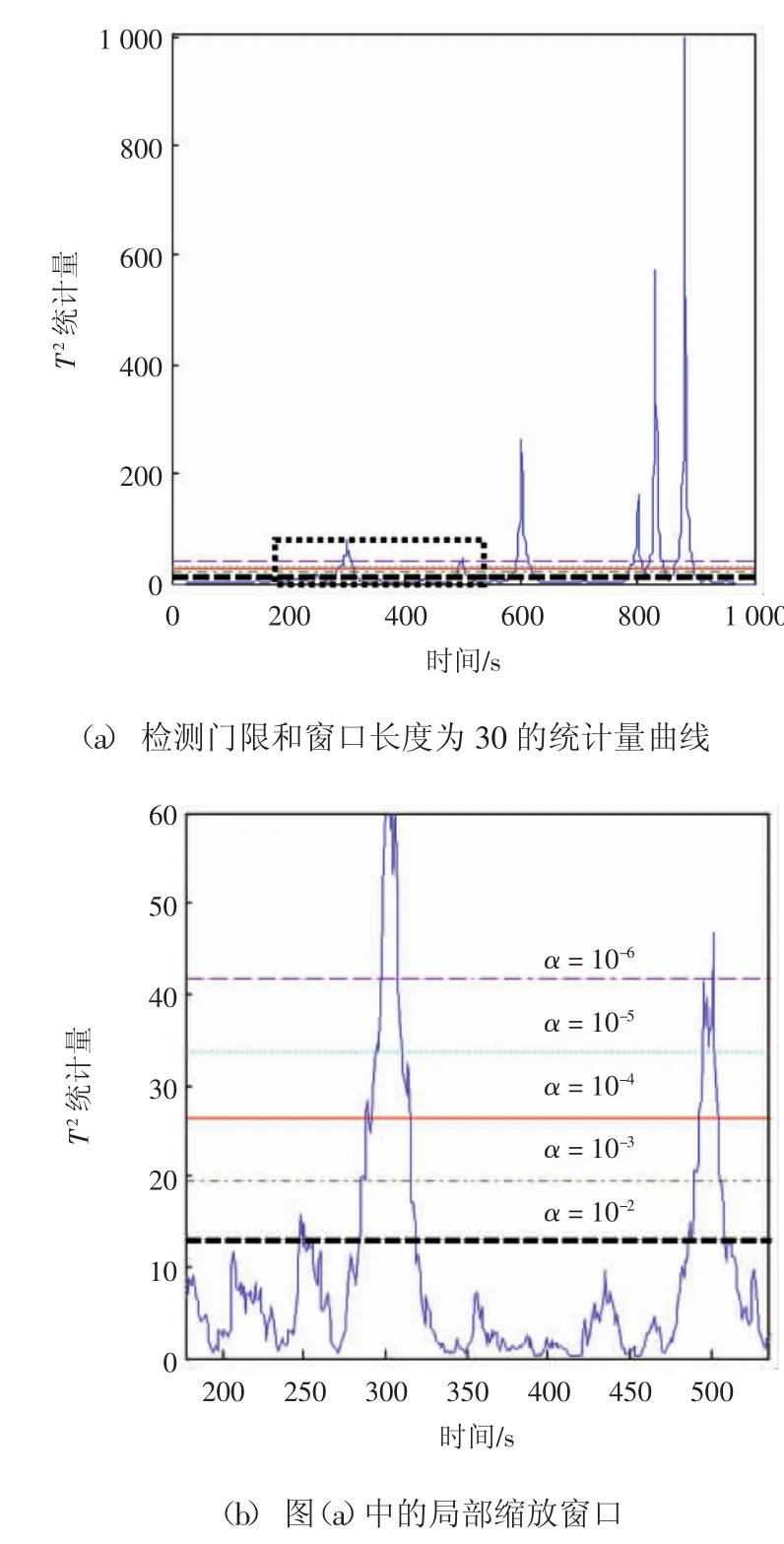
图1 检测门限和仿真数据统计量曲线Fig.1 Thresholds and statistic curves of simulation data
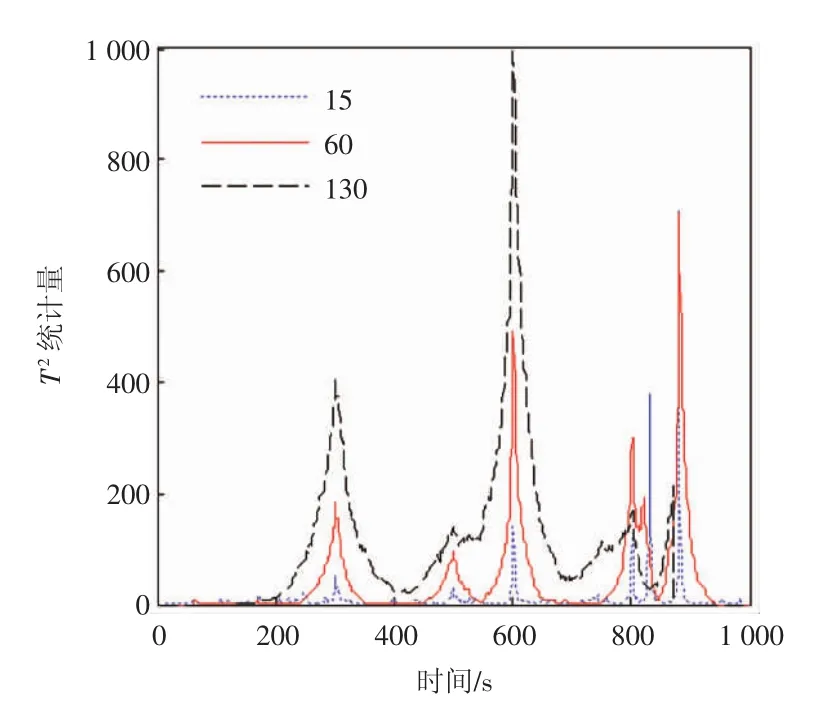
图2 不同窗口长度的统计量曲线Fig.2 Statistic curves for different window sizes
下面利用由ADS-B接收机获取的真实航迹数据进行变点检测与估计性能分析。该数据描述航空器B737-800由天津—昆明的航迹信息,选取巡航阶段中约25 min的航迹数据,相应数据曲线如图4所示。图4(a)是高度、地速与升降率等参数的实际变化原始数据,航空器高度从约22 000 ft经过两次调整爬升到32 000 ft,在此期间地速保持在420 kts左右,升降率存在两次明显的波动。图4(b)是相应的差分结果。由图4(b)可见,高度差分数据有明显的规律,能直观地反映出变点的位置。当有变点发生时,地速差分数据波动的频率显著增高,升降率差分数据波动的幅度明显增大。
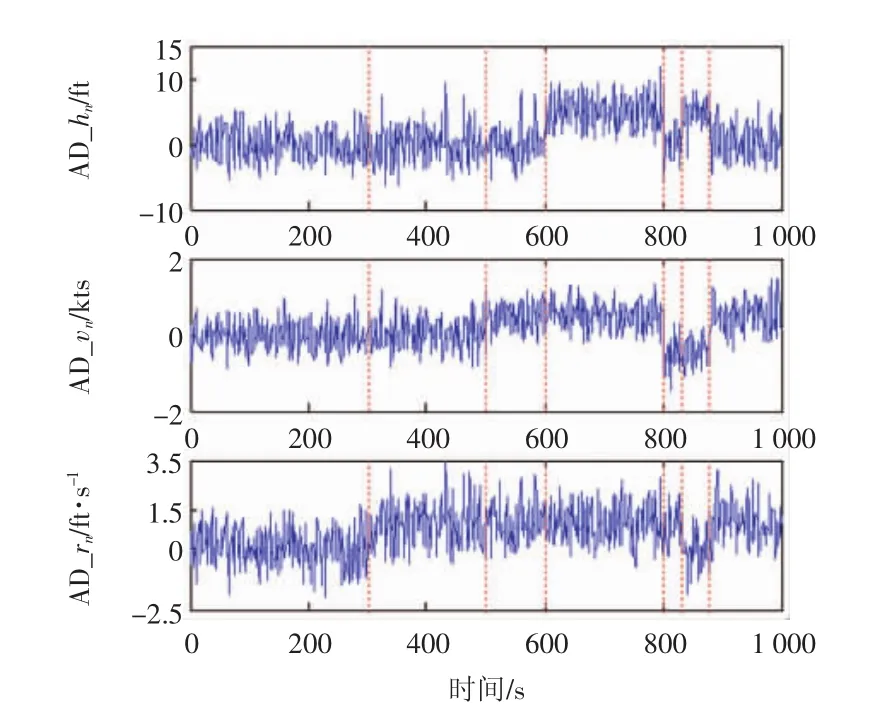
图3 仿真数据的变点判识Fig.3 Change points recognition of simulation data
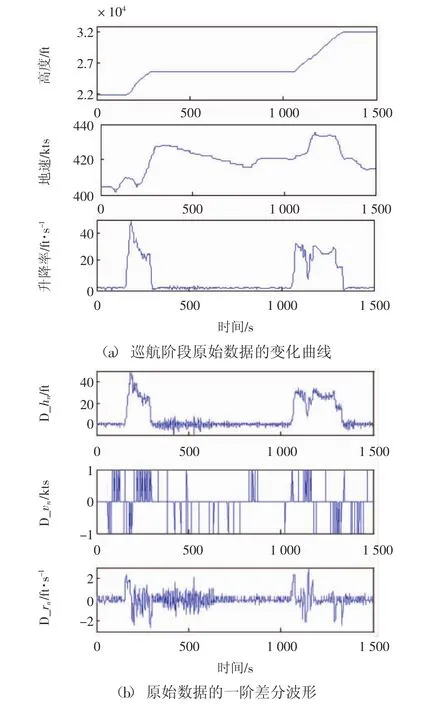
图4 巡航段部分数据的参数变化和一阶差分曲线Fig.4 Curves of original data and first-order differential data of cruise phase
顺序首尾相接两窗口沿航迹数据滑动,得到Hotelling’s T2统计量的变化曲线,如图 5(a)所示。Hotelling’s T2统计量曲线的4个峰值说明有4个显著的变点发生,表明了数据整体参数存在突变。由图5(a)可见,当有变点发生时,统计量曲线便迅速攀升。而在240和1 300附近,出现了较低的峰值,相应的峰值反映了地速和升降率的突变。图5(a)中Hotelling’s T2统计量的最大峰值超过了1 000,由图4(b)中的一阶差分数据可以看出,高度数据的均值跳变幅度最大约为40 ft,地速的约为2 kts,升降率的约为5 ft/s,由于高度数据的均值存在较大的跳变幅度,这就导致了Hotelling’s T2统计量的显著增大。当显著度水平设置为α=10-3时,变点检测结果如图5(b)所示。图中共检测出7个变点,其中4个变点反映了整体参数的突变,3个变点反映了地速或升降率的变化。

图5 巡航段航空数据统计量曲线与变点判识(l1=l2=60)Fig.5 Statistic curve and segmentations of cruise phase(l1=l2=60)
当两窗口的长度设置为l1=l2=60时,显著度水平与变点判识情况如表3所示。由于检测到变点后,在数据W2前补充2d个数据,所以变点的位置可能大于60。由表3的统计结果可见,当显著度水平α较大时,门限值较低,检测出的变点数量较多,发生虚警的概率较大;当α≤10-3时,当前数据段变点的数量不再发生变化,但估计的变点位置会有差别,这是由于检测门限升高,检测到变点的时刻发生延时引起的;当α≤10-5时,检测到的变点位置不再发生大的变化。因此,对于航迹数据的变点检测的显著度水平取α=10-5。

表3 不同显著度水平α下检测到的变点位置分布Tab.3 Distribution of detected change points with different significant levels of α
最后对全航程的各个飞行阶段进行变点检测与判识。采用上述数据集的全部数据,共11 686条,两窗口长度设置为l1=l2=60,显著度水平α=10-5时,共检测出30个变点,如图6所示。由图6可见,检测出的变点主要反映了航空器整体参数的显著变化,但也存在虚警,如第1 140点处的结果。
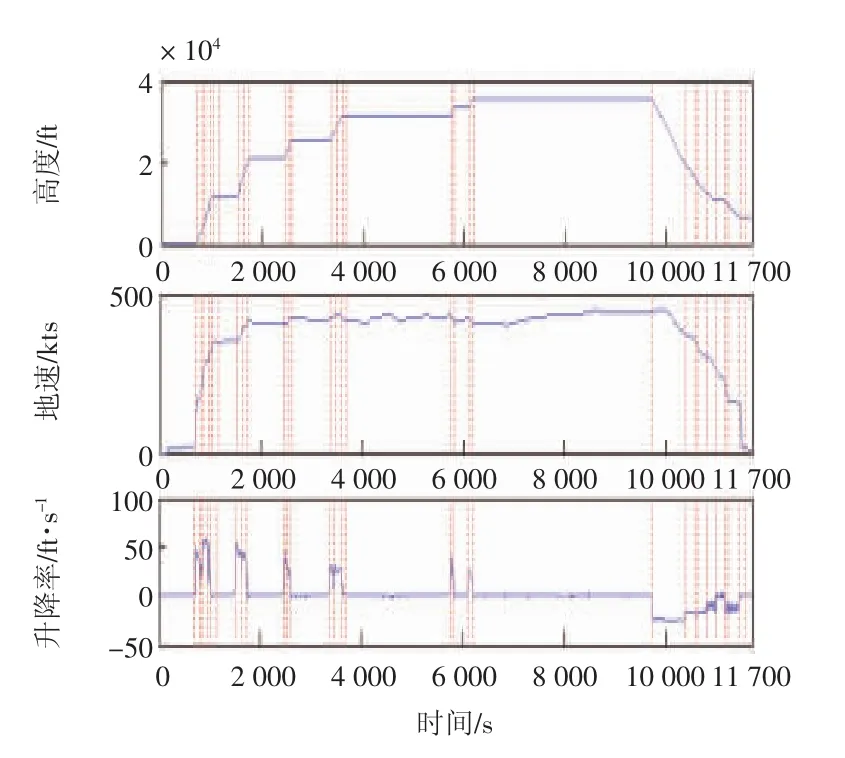
图6 航空器一次完整飞行的变点判识Fig.6 Change point detection and segmentation of a complete flight of an aircraft
6 结语
根据航空器轨迹参数变化特点,将航空器轨迹的实时划分问题转化为实时变点检测问题,利用顺序双滑动窗口截取航迹数据,在整体参数协方差一致性的假设前提下,引入多变量Hotelling’s T2统计量,通过判识统计量的大小实现相应的变点检测。实验结果表明,结合航空器轨迹的具体特点,选择适度的窗口长度和显著度指标,可以有效地解决航空器轨迹的实时划分问题。
[1]ICAO.ICAO Environ-Mental Report 2016[R].Montreal:Environment BrandoftheICAO,2016.
[2]陈静杰,肖冠平.飞机油耗分析工具设计[J].计算机工程与设计,2014,35(11):4012-4016.
[3]张召悦,王 超,孟 娜,等.基于航迹分段的飞行程序噪声评估方法[J].科学技术与工程,2014,14(3):116-120.
[4]ECKSTEIN A.Automated Flight Track Taxonomy for Measuring Benefits from Performance Based Navigation[C]//2009 Integrated Communications,Navigation and Surveillance Conference.Arlington:IEEE Computer Society Press,2009:1-12.
[5]尹文军,倪世宏.一种基于遗传算法的飞行动作识别方法[J].电脑开发与应用,2006,19(4):50-51.
[6]王洁宁,孙 禾,赵元棣.面向终端区航空器飞行状态识别的HMM方法[J].航空计算技术,2013,43(2):1-5.
[7]LU H,MAO K F.Research on Stage Classification of Flight Parameter Based on PTSVM[C]//13th IEEE International Conference on Computational Science and Engineering.Hong Kong:IEEE,2010:55-63.
[8]李丹丹,路 辉,郎荣玲.基于主成分分析和支持向量机的飞参阶段划分研究[J].现代电子技术,2010,33(8):134-137.
[9]HOTELLING H.Multivariate Quality Control—Illustrated by the Air Testing of Bombsights,in Techniques of Statistical Analysis[M].New York:McGraw-Hill,1947:110-122.
[10]ZAMBA K D,HAWKINS D M.A multivariate change-point model for statistical process control[J].Technometrics,2006,48(4):539-549.
[11]KUNCHEVA L I.Change detection in streaming multivariate data using likelihood detectors[J].IEEE Transactions on Knowledge and Data Engineering,2013,25(5):1175-1180.
[12]JOHNSONRA,WICHERNDW.AppliedMultivariateStatisticalAnalysis[M].6th ed.Upper Saddle River,NJ:Prentice Hall,2007:285-286.
(责任编辑:杨媛媛)
Research on change point detection and recognition of aircraft trajectory
SU Zhiganga,b,LI Zhiqianga,HAO Jingtangb
(a.Intelligent Signal and Image Processing Key Lab of Tianjin;b.Sino-European Institute of Aviation Engineering,CAUC,Tianjin 300300,China)
Effective division of aircraft flight phase is an important technical measure of supporting active monitoring of aviation emission,which can be realized via change point detection and recognition.According to the characteristics of multivariate T2statistics,under the assumption of variance consistency of overall data parameters,a method with sequential double sliding window is proposed for detecting and estimating the change points.Simulation and experimental results show that the proposed method is more sensitive to the size of the window,change point detecting problem of trajectory can be effectively solved with well selected window length.According to the characteristics of aircraft trajectory,the proposed method is validated effective under the premise of appropriate window length.
aviation emission;emission monitoring;trajectory segment;change point detection;T2statistics
V557;TB114.2
:A
:1674-5590(2017)04-0001-06
2017-03-28;
:2017-04-10
:中央高校基本科研业务费专项(3122017111)
苏志刚(1972—),男,黑龙江尚志人,教授,工学博士,研究方向为阵列信号处理、信息融合及空管新技术.
