北斗/GPS伪卫星定位系统中信号跟踪算法研究
2017-09-19曹华杰
曹华杰,刘 源
(西南交通大学 信息科学与技术学院,四川 成都 611756)
北斗/GPS伪卫星定位系统中信号跟踪算法研究
曹华杰,刘 源
(西南交通大学 信息科学与技术学院,四川 成都 611756)
北斗/GPS伪卫星定位系统主要应用在卫星信号遮挡严重的区域,能独立或辅助增强北斗/GPS卫星定位。伪卫星信号的捕获跟踪是进行定位解算的前提,针对伪卫星信号存在跟踪不稳定的情况,在详细分析了伪卫星信号生成和捕获跟踪算法原理的基础上,基于模块复用思想,提出了一种捕获跟踪一体化方案。该方案中的捕获算法采用传统的滑动捕获算法,码跟踪算法采用Early-Late算法,在信号解调的过程中采用Costas PLL载波跟踪环路。通过采集的GPS卫星信号仿真可发现跟踪稳定后即时码的能量最大,即时码保持稳定表明进入稳定跟踪状态。在FPGA硬件平台验证了该方案,并对比分析了存在多普勒频偏和无频偏情况下的性能。仿真结果表明,该方案在多普勒频率偏移下依然能够有效、稳定地跟踪解调出导航信号。
GPS/北斗;伪卫星;跟踪算法;Early-Late;动态跟踪
0 引 言
导航定位技术在人类历史的发展进程中一直起着相当重要的作用。目前,人们对于导航和定位的需求日益增大。相对于其他的定位系统而言,卫星定位系统的使用范围最广泛。与其他类型的导航系统相比,卫星导航系统具有全天候、高效率、高覆盖率、高精度等优点[1]。然而随着导航定位系统的应用越来越广泛,在某些特殊的场景下依然不能很好地为用户提供高精度的定位服务。例如,在山谷中的矿区、隧道,城市中高楼密集的“城市峡谷”、地下停车场以及地铁等场景,由于卫星导航系统的卫星信号受到阻挡,无法接收信号和提供精确的定位服务,不能满足人们对高精度、实时定位的需求。为了解决上述问题,有必要引入伪卫星增强系统。这是一种新型的定位技术,可以很好地解决上述问题。因此,对于伪卫星系统的研究是卫星导航系统发展的潜在需要和必然趋势,具有非常大的实际意义。
伪卫星又称“地面卫星”,是从地面某特定地点发射类似于GPS/BDS的导航信号,采用的电文格式与GPS/BDS基本一致。由于伪卫星发射的是类似于GPS/BDS的信号,并工作在GPS/BDS的频率上,所以用户的GPS/BDS接收机可以用来同时接收GPS/BDS信号和伪卫星信号,而不必增设另一套伪卫星接收设备。地面建立的伪卫星站不仅可以增强区域性GPS/BDS卫星导航定位系统,而且可以提高卫星定位系统的可靠性和抗干扰能力[2-4]。
目前国内很多参考文献对伪卫星定位系统的研究集中在增强北斗/GPS性能分析及组网布局、定位算法的研究方面。国外很多文献对伪卫星定位系统的研究侧重定位精度相关算法的分析与应用,如文献[5-7]。在伪卫星定位系统中捕获和跟踪是最重要的一个步骤,捕获是得到粗略的参数,跟踪则是将这些参数细化。捕获及跟踪的环路设计影响导航信号稳定的解调,所以研究跟踪算法对于伪卫星定位系统也很重要。因此,将重点研究捕获跟踪算法,并对其进行仿真。
1 伪卫星定位基础
北斗二代有3个频段,分别是B1(1 561.098 MHz)、B2(1 207.14 MHz)、B3(1 268.52 MHz)。北斗卫星发射的信号格式由载波、伪码、数据码组成。而GPS卫星有两个频段,分别是L1频段的1 575.42 MHz和L2频段的1 227.6 MHz。
在伪卫星中,可以根据应用场景,选择GPS卫星或者北斗卫星作为参考设计。在北斗/GPS伪卫星系统中,信号采用C/A码,信号的生成方式基本一致。下面主要介绍北斗伪卫星的信号生成,并说明北斗伪卫星和GPS伪卫星的差别。
北斗伪卫星的基准频率为2.046 MHz,经过2分频后得到1.023 MHz的C/A码,C/A码经过50倍分频后得到50 Hz的数据码。C/A码和数据码经过模2加后得到宽度为1.023 MHz的频谱。经过数字载波调制,得到伪卫星的信号。
文献[8]简化后,伪卫星信号结构如式(1)所示:

(1)
其中,AG为载波振幅;C(t)为C/A码;D(t)为数据码;w1为载波角频率;φ1为载波初始相位。
在GPS伪卫星中,采用10.023 MHz的基准频率,分频系数也不相同,可以通过计算得到。在北斗/GPS伪卫星接收机中,为了完成定位,首先将接收的模拟信号进行采样,得到数字信号。然后经过捕获得到信号必要的参数,主要是载波的频率和C/A码初始点,再进行跟踪,跟踪后进行导航电文的提取,接着进行伪距的计算,最后经过处理得到定位信息[8-9]。伪卫星的定位流程如图1所示。

图1 伪卫星定位流程
2 伪卫星跟踪算法研究
当捕获到某颗导航卫星信号后,会得到该卫星的C/A码初始相位和载波的多普勒频移。由于多普勒效应会使载波频率发生动态偏移,还有C/A码的相位也会随着卫星与接收机间距离的变化而变化,所以北斗/GPS伪卫星信号会一直处于动态变化中[10-13]。因此在后续的信号处理中,必须克服这些因素的影响,才能在捕获后能够持续、准确地获取导航电文,最终完成定位解算。
文献[14]中的捕获算法采用了并行结构在FPGA上进行设计,文中采用滑动相关捕获法进行信号的捕获。伪卫星信号的捕获流程如图2所示。
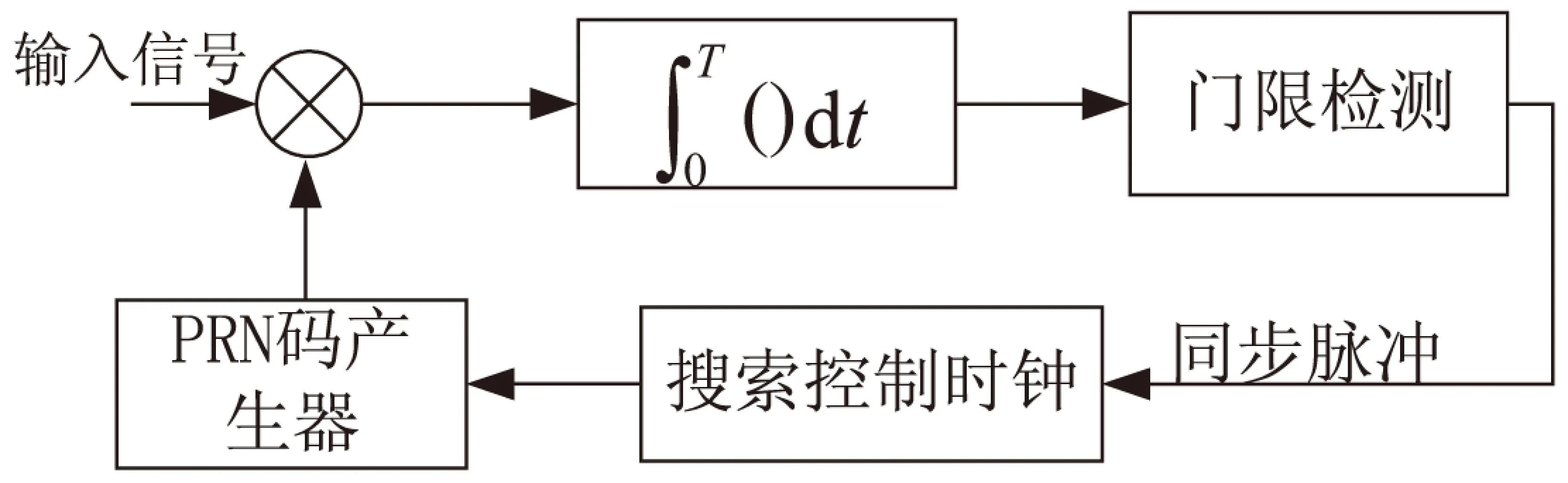
图2 滑动相关捕获原理
如图2所示,接收到的信息与本地伪随机码相乘再积分,求出它们的自相关值,然后与门限值进行比较,当达到门限值时就说明捕获到了有用信息。这里利用了伪随机码的自相关特性,当两个相同的码序列相位上一致时,其相关值最大。
当捕获到有用信号时,为了继续保持同步,需要分别进行载波跟踪环路和码跟踪环路设计。一般码跟踪环路分为相干和非相干两类。相干跟踪是在确定发送信号的载波频率和相位的情况下进行的。非相干跟踪是在不确定发送信号的载波频率和相位的情况下进行的。在大部分通信系统中都是非相干情况,因此文中主要研究非相干跟踪情况。常用的跟踪环路有两种,分别是延迟锁相环(DLL)和抖动锁相环(TDL)。在卫星通信系统中采用DLL环路进行码跟踪。
如果能够将捕获和码跟踪过程用一个环路来实现,将大大减少所需的硬件资源。由于捕获和跟踪在时间域上没有重叠,所以通过部分组件复用(如积分清零器)可以实现捕获和跟踪一体化设计方案。载波跟踪环路可以采用经典的Costas PLL环路来实现载波跟踪信号,伪卫星信号捕获跟踪总原理如图3所示。其中码跟踪环路采用捕获跟踪一体化方案进行设计。
通过采集一段时间内的GPS卫星信号对跟踪算法进行研究。将采集的GPS卫星信号经过处理后,得到中频数字信号,表达式为:

图3 捕获跟踪总体方案原理图
s(n)=ACCi(n)Di(n)sin(ωIFn+φ0)+e(n)
(2)
其中,AC为C/A码的振幅;Ci(n)为C/A码;Di(n)为数据码;ωIF为中频载波的角频率;φ0为输入信号的初相位;e(n)为噪音信号。
当本地的C/A码、本地载波和输入信号的C/A码以及中频的载波同步时,能量集中在I路。此时的信号经过本地载波解调,去除了载波的调制,得到的信号如式(3)所示。
s(n)sin(ωIFn+φ0)=(ACCi(n)Di(n)sin(ωIFn+φ0))sin(ωIFn+φ0)= 1/2ACCi(n)Di(n)-1/2cos(2(ωIFn+φ0))+e(n)sin(ωIFn+φ0)
(3)
经过滤波后,得到前面的1/2ACCi(n)Di(n)。然后经过解扩频码,得到1/2ACCi(n)Di(n)*ACCi(n)。化简后,可以将1/2ACCi(n)*ACCi(n)看成常数K,即解扩频码后得到的结果为K*Di(n),也就是得到了数据码。在C/A码的跟踪环路中,关于载波的跟踪环路的噪声带宽设置可以参考式(4):
ωn=2Bn/[damp+1/4*damp]
(4)
在码跟踪和载波跟踪后,得到数据码,需要在跟踪环路中的I支路将它转化为二进制,得到导航电文的数据位。在数据码中的频率为50 Hz,其码速率为50 bps,然而在跟踪环路输出的速率为1 000 bps。相当于跟踪环路中连续输出20个才能并成一个数据位,这叫做位同步。
通过对伪码的能量分布进行仿真(见图4),可以看出在0.1 s之前,超前码、即时码和滞后码的能量混乱,经过跟踪稳定后,即时码的能量最大,且处于稳定状态。
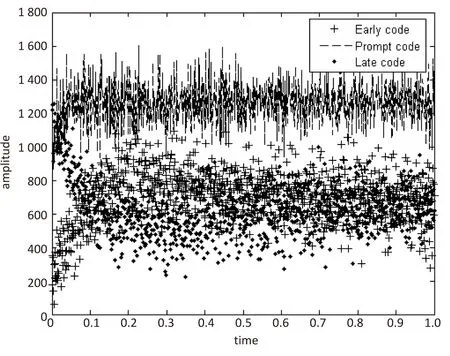
图4 伪码能量分布图
将图3所示算法在FPGA上进行实现,编译通过后编写Testbench产生仿真时钟、复位信号并从外部文件中读取采集到的基带数字信号(Matlab产生)。仿真结果中,I支路输出结果趋近于方波,而Q支路的结果趋近于0,符合理论结果(跟踪稳定后能量集中在I支路,Q支路能量接近0),说明进入稳定跟踪状态。可以看出导航数据能够正常、稳定地解调出来。同时,改变仿真时的NCO载波频率,经过一段时间的跟踪调整后,该方案也能稳定地跟踪信号并能解调出导航电文,进一步说明该方案能稳定地捕获跟踪信号。
3 结束语
针对伪卫星定位系统中的信号跟踪技术,在研究码跟踪环路和载波跟踪环路、北斗/GPS伪卫星信号生成以及GPS信号跟踪原理的基础上,基于模块复用思路提出了一种捕获跟踪一体化方案。通过对采集到的GPS卫星数据进行Matlab仿真,在FPGA硬件平台上实现了该方案。由伪码的能量图可以发现,跟踪结果持续、稳定;通过硬件平台的仿真可发现,捕获跟踪后的能量集中在I支路,Q支路能量接近于0,符合理论分析,同时数据码能够稳定地解调出来,这为下一步定位打下了良好的基础。
[1] 陈建卫.基于NS210-B的北斗卫星导航系统B1信号的研究[D].南京:南京理工大学,2014.
[2] 王 博,焦海松,谷 庆,等.北斗接收机动态定位精度测试与分析[J].导航定位学报,2014(2):109-112.
[3] 赵 龙.北斗导航定位系统关键技术研究[D].西安:西安电子科技大学,2014.
[4] Dale K,Parkinson B W.The use of pseudo-satellites for improving GPS performance[J].Navigation,1984,31(4):303-315.
[5] Zhang X,Zuo X,Li P,et al.Convergence time and positioning accuracy comparision between BDS and GPS precise point positioning[J].Acta Geodaetica Et Cartographica Sinica,2015,44(3):250-256.
[6] Yu Feng,Shi Haiqing,Lu Huan.Research on dynamic two-way time synchronization for air-borne pseudo-satellite in wide area for BD navigation satellite[C]//2014 IEEE Chinese guidance,navigation and control conference.[s.l.]:IEEE,2014:1477-1482.
[7] Jiang W,Li Y,Rizos C.On-the-fly Locata/inertial navigation system integration for precise maritime application[J].Measurement Science and Technology,2013,24(10):105104.
[8] 万晓光.伪卫星组网定位技术研究[D].上海:上海交通大学,2011.
[9] 徐晓苏,范金洋.GPS软件接收机捕获算法[J].中国惯性技术学报,2009,17(2):165-169.
[10] 朱国纬.基于FPGA的Locata系统定位接收机设计[D].成都:西南交通大学,2015.
[11] 李万国.卫星定位接收机捕获与跟踪算法的研究与实现[D].哈尔滨:哈尔滨工业大学,2008.
[12] 赵 龙.北斗导航定位系统关键技术研究[D].西安:西安电子科技大学,2014.
[13] 叶加伟.GPS接收机捕获跟踪算法研究及FPGA设计[D].成都:西南交通大学,2009.
[14] 易 诗.高速直扩通信系统中调制解调技术研究[D].成都:电子科技大学,2009.
Research on Signal Tracking Algorithm in Beidou/GPS PseudoSatellite Positioning System
CAO Hua-jie,LIU Yuan
(School of Information Science and Technology,Southwest Jiaotong University,Chengdu 611756,China)
Beidou/GPS pseudo satellite positioning system is mainly used in the area of satellite signal shielding seriously and it can be independent or assistant enhancement of the Beidou/GPS satellite positioning.Pseudo satellite signal acquisition and tracking is the precondition of positioning solution.Aiming at the situation of tracking instability for pseudo satellite signal,after the pseudo satellite signal generation as well as acquisition has been analyzed in detail,an integrated scheme of acquisition and tracking based on model reuse is proposed.The capture algorithm is adoption of traditional sliding capture algorithm and the tracking algorithm is the Early-Late in this scheme,and Costas PLL carrier tracking loop has been employed in the process of signal demodulation.Through simulation of the GPS satellite signal,it is found that the energy of the real time code is the largest after the instant code remains stable.Experiments for verification on this scheme on the FPGA hardware platform have been conducted as well as the contrast analysis on its performances on the conditions of Doppler frequency offset and non-frequency offset.The simulation results show that the proposed scheme in the presence of Doppler frequency offset has operated stably and effectively in signal tracking and demodulation.
GPS/BDS;pseudo satellite;tracking algorithm;Early-Late;dynamic tracking
2016-06-14
:2016-09-22 < class="emphasis_bold">网络出版时间
时间:2017-07-05
全国大学生创新基金重点项目(201310292023Z);江苏省“挑战杯-卓越杯”基金项目(201310292039Y)
曹华杰(1989-),男,硕士研究生,CCF会员(200050041G),研究方向为嵌入式技术、无线定位技术等。
http://kns.cnki.net/kcms/detail/61.1450.TP.20170705.1649.016.html
TP301.6
:A
:1673-629X(2017)09-0179-03
10.3969/j.issn.1673-629X.2017.09.039
