仿生咀嚼6PSS并联驱动平台的运动学研究
2017-09-15俞经虎詹民民陈根禄李晓锋
代 欣,俞经虎,詹民民,陈根禄,李晓锋
(1.江南大学 机械工程学院,无锡 214122;2.江苏省食品加工技术装备重点实验室,无锡 214122)
仿生咀嚼6PSS并联驱动平台的运动学研究
代 欣1,2,俞经虎1,2,詹民民1,2,陈根禄1,2,李晓锋1,2
(1.江南大学 机械工程学院,无锡 214122;2.江苏省食品加工技术装备重点实验室,无锡 214122)
基于食品物性检测及品质评价、义齿材料检测及评估等领域的需求,设计了一种仿生咀嚼6PSS并联驱动平台。文章介绍了该并联驱动平台的基本结构组成,建立了动平台的运动学模型,并进行运动学分析,得出了位置逆解、速度逆解及雅可比矩阵表达式。在Adams中进行运动学仿真,建立虚拟样机,给予动平台一组模拟右侧咀嚼运动的轨迹,使其模拟下颌咀嚼食物,得到动平台及相关构件的位姿参数曲线,为并联驱动平台的后续运动学性能分析及优化设计提供参考,为动力学分析奠定了基础。
仿生咀嚼;并联驱动平台;运动学;仿真
0 引言
当前,食品加工业发展迅速,竞争也越来越激烈,食品作为特殊存在,对其质量分析除安全、理化等指标外,客观的物性评价需求也越来越高。目前主要有两种评价方式:感官评价和仪器测定,前者即专家组评价,存在一定的主观性及不易标准化的缺点,后者依靠现有的仪器如质构仪等检测,由于其只能上下运动挤压食物,故测量的物性数据与感官测试不一致。仿生机器人将机器人学与现代仿生学相结合,其应用于各个领域中并具有广阔的开发前景[1]。鉴于人类下颌运动是集平移与旋转于一体的复杂三维运动,咀嚼机器人[2]便是根据下颌运动的特点研制出来的,通过咀嚼机器人对食品物性进行检测,能够客观准确地评价食品的质地。国外对咀嚼机器人研究较早,并且较为先进,如日本早稻田大学的WY系列咀嚼机器人[3]、澳大利亚Mark Ⅲ的咀嚼机构[4]、新西兰梅西大学的6RSS食品咀嚼机器人[5]等。相对而言,国内则起步较晚,不过随着并联机器人[6,7]的发展、国家的重视及行业的发展需要,也取得了一些发展,如孙忠雷等[8]的仿生咀嚼装置、大连理工大学丛明等[9]的仿下颌运动机器人等。作为机器人领域的新产品,咀嚼机器人应用于食品质地评价的同时,也可用医疗行业,如义齿材料的检测与评定、下颌康复训练等。本文提出了一种6PSS咀嚼机器人并联驱动平台,对其进行运动学[10,12]等深入研究,不仅有助于促进国内服务机器人的快速发展,也将提高我国食品行业的装备自动化程度,同时推动我国医疗行业的发展。
1 机构总体介绍
设计的6PSS并联机器人整体结构如图1所示,该并联咀嚼平台控制算法较为简单,考虑到静平台的设计难度以及后续实验的可行性和易操作性,将连接分支设置在动平台下方。整体设计综合考虑了人类下颌系统以及生物力学特性。
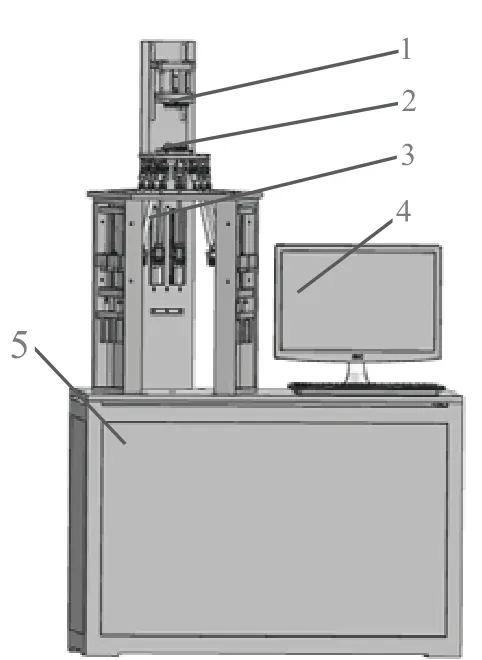
图1 6PSS并联机器人整体结构
本文研究的仿生咀嚼6PSS并联驱动平台便是上述并联机器人的重要结构组成部分,其CAD模型和结构简图如图2所示,该机构由静平台(模拟人类上颌)、动平台(模拟人类下颌)和六条支链(模拟肌肉)组成(该图中静平台和机架省略)。

图2 仿生咀嚼6PSS并联驱动平台CAD模型及结构简图
为方便叙述,将支链标记为1-6号,图2结构简图中各下标字母与之对应。该并联驱动平台关于YOZ平面对称,动平台通过6根支链与机架相连,每根支链由导轨、滚珠丝杠、滑块组成的移动副(P)、连杆一端与滑块连接的球副(S)和连杆另一端与动平台连接的另一球副(S)组成。图中OM、OB分别为动坐标系和固定坐标系,Bi、Ci和Mi分别表示丝杠固定于基座位置、与滑块相连的球副在固定坐标系中的位置和与动平台相连的球副在固定坐标系下的位置(其中i=1,2,…,6),下同。根据Kutzbach Grubler公式,可计算得到驱动平台自由度,计算公式如下:

式(1)中,m为机构自由度数,本文中机构个数n=14,运动副数g=18,第i个运动副的相对自由度数fi=7(其中移动副为1,两个球副各为3),局部自由度f0=6,因此,本机构自由度:

根据式(2)可知,仿生咀嚼6PSS并联驱动平台结构自由度为6。
3 动平台运动学分析
3.1 运动学建模
基于上文建立好的坐标系,进行动平台位姿计算,动平台坐标系OM在固定坐标系OB中的齐次旋转矩阵为:
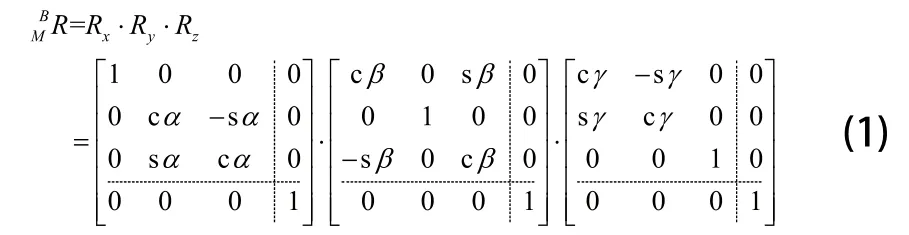

由此,运动学模型建立完毕,可以进行进一步的逆解分析。
3.2 位置逆解
如图3所示,为6根支链中任一支链简图,由此可知:

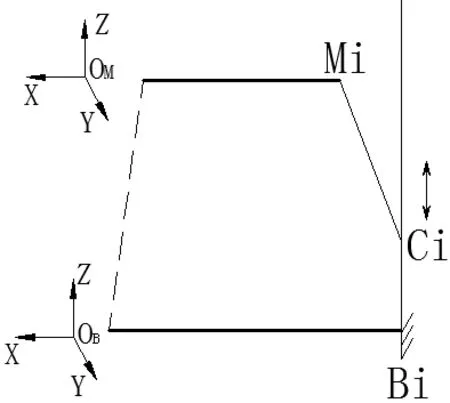
图3 单支链简图
式(5)中Li为杆长,分析该机构简图,可知:
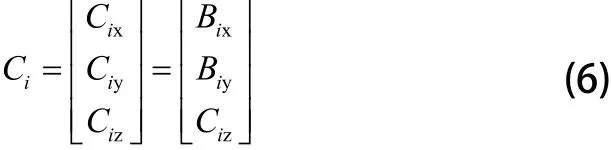
式(6)中机构尺寸参数Bix、Biy已知,Ciz未知,位置逆解就是要求出Ciz在固定坐标系OB中坐标,也就是滑动副Pi在空间中的位置坐标。

式(7)两边平方,得到:

整理式(8),并考虑滑动副Pi处于动平台下方,故取负值,得到:

此时,式(9)等式右侧均为已知量,可以利用Matlab数值求解求出。
3.3 速度逆解
由上一节式(9)可知,Ciz是OM相对于OB变化参数的函数,则速度逆解可以由速度、位移关系推导得到。
因为Ciz是关于的函数,对时间求导,可得:

式(10)整理可得:
3.4 雅可比矩阵
上节中式(11)可以简写,得到:

其中矩阵J:
J即为驱动平台的雅可比矩阵,它反映了输入与输出之间的线性关系,故也称为一阶影响系数矩阵,它与整个机构的位姿以及各个分支运动副的方向有关。其具体数值也可由Matlab程序求解。
4 动平台运动学仿真
4.1 虚拟样机建立
将UG建立好的仿生咀嚼6PSS并联驱动平台模型转换成中间格式,并进行相关处理,如检查坐标系、添加运动副、广义驱动等,构建好的虚拟样机[13,14]如图4所示,其中需要固定的部件如机架、导轨、静平台等均被隐藏。

图4 仿生咀嚼6PSS并联驱动平台Adams虚拟样机
4.2 设计咀嚼运动轨迹
为了对仿生咀嚼驱动平台进行逆运动学仿真,同时考虑到下颌运动状态的复杂性,现根据下颌咀嚼幅度及相关咀嚼规律,为动平台设计一组咀嚼运动轨迹,并设定其周期为1秒,用以模拟人类右侧咀嚼食物。本文结合Adams中的IF函数,采用三角函数模拟逼近来进行运动轨迹控制。在动坐标系上添加广义驱动,得到位姿关于时间表达式,如下:
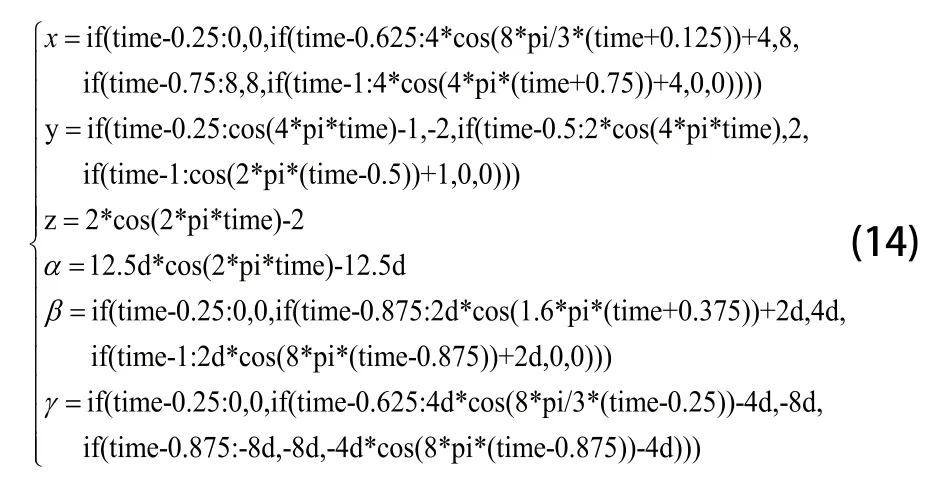
式(14)中d表示角度符号。
4.3 仿真结果
运动学仿真结果如下,图5(a)、(b)、(c)分别表示仿真右侧咀嚼运动时,动平台质心位移、速度、加速度随时间变化曲线。

图5 动平台质心位移、速度、加速度曲线
图6(a)、(b)、(c)分别表示仿真右侧咀嚼运动时,动平台相对于静坐标系转角、角速度、角加速度随时间变化曲线。

图6 动平台相对于静坐标系转角、角速度、角加速度曲线
通过对上述位姿曲线进行分析,可知设计的咀嚼运动轨迹具有一定的仿生性能,速度、角速度、加速度、角加速度等和人类真实咀嚼运动规律较为吻合。
为模拟下颌切牙的运动轨迹,在动平台上设置一参考点,则其运动轨迹如图7所示。
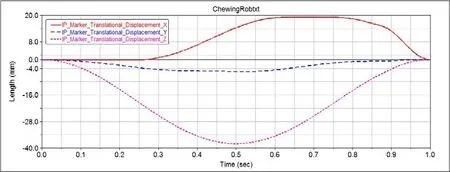
图7 下颌切牙咀嚼运动位移曲线
通过分析上述曲线,发现其咀嚼运动幅度均超出正常范围,说明所设计的仿生咀嚼6PSS并联驱动平台具有较好的仿生性能,能够较为真实地模拟人类右侧咀嚼食物。
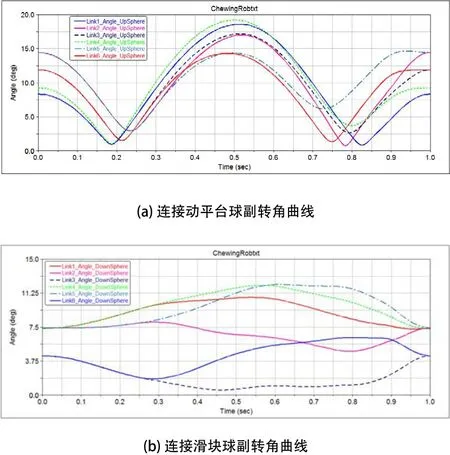
图8 连接动平台球副和连接滑块球副的转角曲线
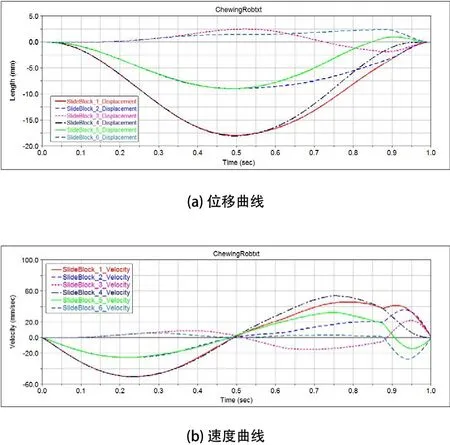
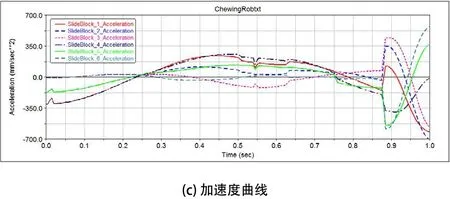
图9 滑块的位移、速度、加速度曲线
同时,通过逆运动学仿真,也可得到图8的球副位姿曲线和图9的滑块的位姿曲线,为后续机构的运动学性能分析和优化设计奠定了基础。
5 结论
1)设计了一种仿生咀嚼6PSS并联驱动平台,并对其进行了运动学分析,得出了位置逆解、速度逆解和雅可比矩阵表达式。
2)运用Adams软件构建了虚拟样机,对机构进行了运动学仿真,通过给定一组模拟人类右侧咀嚼运动的轨迹参数,模拟人类咀嚼食物,得到了动平台位移、转角、速度、角速度、加速度、角加速度随时间变化的位姿曲线以及球副、滑块的位姿曲线,一定程度上考察了平台机构部件的相对运动状态,同时也证明了该机构能够较好地模拟人类右侧咀嚼食物,符合咀嚼运动规律,为评价和检测系统的运动特性提供了依据。
3)对仿生咀嚼6PSS并联驱动平台进行运动学分析,为下一步机构优化和动力学分析等深入研究奠定了基础。咀嚼机器人的应用与发展,不仅提高了食品物性评价的客观性与准确性,还将推动服务机器人在我国食品加工业的应用,提高其装备自动化水平,同时,咀嚼机器人还可应用于义齿检测与评估、下颌障碍训练等医疗领域,推动医疗行业的发展。
[1] 吉爱红,戴振东,周来水.仿生机器人的研究进展[J].机器人,2005,27(3):284-288.
[2] 丛明,苌占波,杜宇,等.咀嚼机器人的研究现状与发展[J].机器人技术与应用,2009,(6):21-24.
[3] Takanobu H, Maruyama T, Takanishi A, et al. Mouth opening and closing training with 6-DOF parallel robot[c].the 2000 IEEE International Conference on Robotics and Automation, San Francisco, April 2000: 1384-1389.
[4] C. BOWEY, D. BURGESS. Robotic temporomandibular joint,Final Year Project Report[R].University of Adelaide, Adelaide ,2005.
[5] Xu WL, Lewis d, Bronlund J, et al. Mechanism, design and motion control of a linkage chewing device[J].Mechanisms and Machine Theory,2008,43(2):376-389.
[6] 丛爽,尚伟伟.并联机器人—建模、控制优化与应用[M].北京:电子工业出版社,2010,1-15.
[7] 毕军.6-PSS并联机器人的运动学及动力学研究[D].重庆:重庆大学,2011,1-11.
[8] 孙钟雷,孙永海,万鹏等.仿生咀嚼装置设计与试验[J].农业机械学报,2011,42(8):214-218.
[9] 刘同占.仿下颌运动机器人设计及仿生性能研究[D].大连:大连理工大学,2012,3-16.
[10] 吴培栋.Stewart平台的运动学与逆运动学的基础研究[D].武汉:华中科技大学,2008,31-45.
[11] 孟广柱.3-RRRT并联机器人运动学和动力学建模[D].天津:天津理工大学,2009,35-50.
[12] 史浩明.6-PUS并联机构动力学分析及优化设计[D].重庆:重庆大学,2012,40-55.
[13] 杜婧.仿下颌运动机器人的样机设计和实验研究[D].大连:大连理工大学,2014,11-38.
[14] 雷孟冬.六自由度咀嚼虚拟样机设计[D].成都:电子科技大学,2010,1-40.
Kinematics analysis of bionic chewing 6PSS parallel driven platform
DAI Xin1,2, YU Jing-hu1,2, ZHAN Min-min1,2, CHEN Gen-lu1,2, LI Xiao-feng1,2
TP391.9
:A
:1009-0134(2017)08-0034-04
2017-06-14
国家自然科学基金项目(51375209)
代欣(1993 -),女,湖北孝感人,硕士研究生,研究方向为仿生机器人。
