基于STM32单片机的自动喷灌机器人①
2017-09-15陶重犇冯佳佳孙云飞
赵 涛,陶重犇,冯佳佳,孙云飞
1(苏州科技大学天平学院,苏州 215009)2(苏州科技大学 建筑智慧节能江苏省重点实验室,苏州 215009)
基于STM32单片机的自动喷灌机器人①
赵 涛1,陶重犇2,冯佳佳2,孙云飞2
1(苏州科技大学天平学院,苏州 215009)2(苏州科技大学 建筑智慧节能江苏省重点实验室,苏州 215009)
针对农业大棚中人工喷灌存在的效率低、劳动强度大等问题,为了提高农业大棚自动化水平,本文提出了一种基于STM32单片机为核心控制器的自动喷灌机器人.该机器人通过灰度传感器实现循线,以三轮差分转动方式控制机器人底盘前进与转弯.并基于栅格法提出了一种适用于农业大棚环境的路径规划算法.水箱中的水泵开关由继电器间接控制,并可通过蓝牙模块远程控制喷灌.温湿度传感器负责实时测量土壤湿度,并传回单片机进行处理.实验表明,本文以模块化思想设计的喷灌机器人功能齐备,有利于农业机器人的推广使用.
STM32 单片机;农业机器人;自动喷灌;栅格法
随着我国农业生产的逐渐大规模化,农业机器人成为人们从事农业生产必不可少的重要助手.农业机器人的研发也成为研究的重点和热点.然而,农业机器人有着很多的应用领域,包括温室果蔬自动采摘、施肥、喷洒农药、农田灌溉和插秧等方面[1].我国农业机器人的研究从20世纪90年代中期开始,至今在除草机器人、采摘机器人、喷药机器人、施肥机器人和嫁接机器人等各方面都有研究成果[2].贺晓龙等人提出基于AVR单片机为核心,开展了对草坪灌溉机器人的研究[3].开思聪等人基于STM32单片机实现了对仓储搬运机器人的控制[4].贺晓龙等人基于自适应模糊控制,提出了一种适用于草坪环境中的灌溉机器人[5].
本文设计的自动灌溉机器人将STM32单片机作为处理器,以三轮差分转动方式控制移动机器人底盘.并利用STC10温湿度传感器进行湿度实时采集数据,并将采集数据传回单片机.由单片机确定大棚农作物是否需要进行喷灌作业.如果农业大棚中的温湿度低于预设值,那么继电器将控制水泵来实现自动喷灌.
本文采用的STM32单片机是一种低功耗、高性能ARM Cortex-M内核的32位微控制器.拥有灵巧的32位CPU和在系统可编程Flash,能够为自动灌溉机器人提供高灵活、高效的控制.三轮差分移动机器人能够精确控制沿田垄巡线行进,快速到达作物地点进行灌溉作业.
1 系统硬件设计
1.1 自动喷灌机器人总体设计
本文设计的喷灌机器人基于内部的STM32单片机为核心,分为湿度数据检测和数据处理两大功能模块.湿度数据检测功能利用STC10温湿度传感器采集农业大棚中温度和湿度数据,并在机器人身上的数码管上进行显示.数据处理功能模块主要负责将采集到的数据传输回单片机,对数据进行分析和处理,并决策和控制喷灌机器人做出相应的决策.
本文的决策方式是将温湿度传感器采集到的数据与预设阈值进行比较.当采集到的数据低于预设最低值时,由单片机控制继电器,从而间接控制水泵进行喷灌.同时单片机控制蜂鸣器发出蜂鸣提示;当湿度高于预设最低值时,蜂鸣器停止;当湿度高于预设最高值时,单片机控制继电器停止喷灌.此外,喷灌机器人内部安装有蓝牙模块,因此本文编写了手机蓝牙串口APP.借助于该APP可实现通过人工手动遥控的方式,实现利用继电器控制机器人喷头进行喷灌.本文设计的自动喷灌机器人原理图如图1所示.
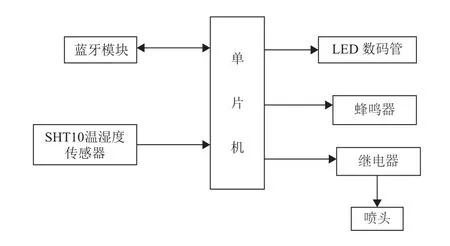
图1 自动喷灌机器人原理图
1.2 自动喷灌机器人硬件结构
自动喷灌机器人由电源模块、控制模块、驱动模块、灰度传感器模块、蓝牙模块、喷灌系统、LED显示模块和车体等八个部分组成,如图2所示.灰度传感器模块感知田垄,将信息传输到控制模块,控制模块经过计算后作出判断,并通过电机控制机器人进行相应运动.由于电路板、电机和电池等模块安放在车身上,车身设计为了考虑到了各模块间的空间和车体自身的承载能力,本文设计的车身采用两个主动轮和一个万向轮的方式.两个主动轮分别连接两个伺服电机来控制机器人的运动——电机的正反转动决定机器人的前进或后退,转速不同决定机器人的运动快慢[6].
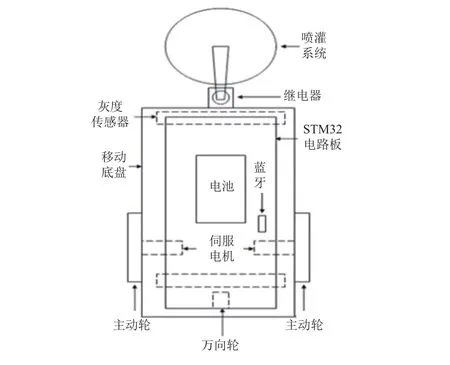
图2 自动喷灌机器人硬件结构图
喷灌系统电路包括1路带光耦隔离继电器模块和水泵,通过继电器的吸合来控制水泵的通断.本文中继电器接单片机P^1.6口,当P^1.6为低电平时,继电器工作,继电器状态指示灯亮.1路带光耦隔离继电器模块能够支持高、低电平触发.当线圈出脚两端加上电压或电流时,线圈的激磁电流将产生磁通,磁通通过铁芯、轭铁、衔铁和气隙组成磁路,并在气隙中产生电磁吸力.当激磁电流上升到某一值时,电磁吸力矩将克服弹簧的反力矩使衔铁转动,并带动推动片推动弹簧,实现触点闭合;当激磁电流减小到一定值时,弹簧的反力矩使得衔铁回到初始状态,触点断开.
蓝牙模块采用BlueCore4-Ext芯片,遵循V2.1+EDR蓝牙模块.具有成本低、体积小、功耗低和收发灵敏性高等优点.主要用于短距离的数据无线传输领域.用户可以通过手机手动控制机器人进行喷灌.
1.3 温湿度实时采集模块
STC10温湿度传感器基于领先世界的CMOSens数字传感技术.具有响应速度快、功耗超低、可与单片机直接相连、极高的可靠性和卓越的长期稳定性等优点.STC10温湿度传感器的DATA脚是1个三态门,用于MCU与STC10之间的数据传输.DATA的状态在串行时钟SCK的下降沿发生改变,在SCK的上升沿有效.
STC10运作过程包括首先发送一组“传输启动”序列初始化,其次发送命令时序,包括3个地址位和5个命令位.测量结束后传输2字节的测量数据和1字节的CRC检验,确定CRC数据位之后通信结束,STC10自动进入休眠状态.传感器测量数据将在喷灌机器人内部的8位共阳极数码管上显示.
2 软件结构设计
2.1 自动喷灌控制模块设计
本文提出的方案是基于机器人内部的STM32单片机,对农业大棚中的农作物进行的智能自动浇灌,自动喷灌机器人系统如图3所示.
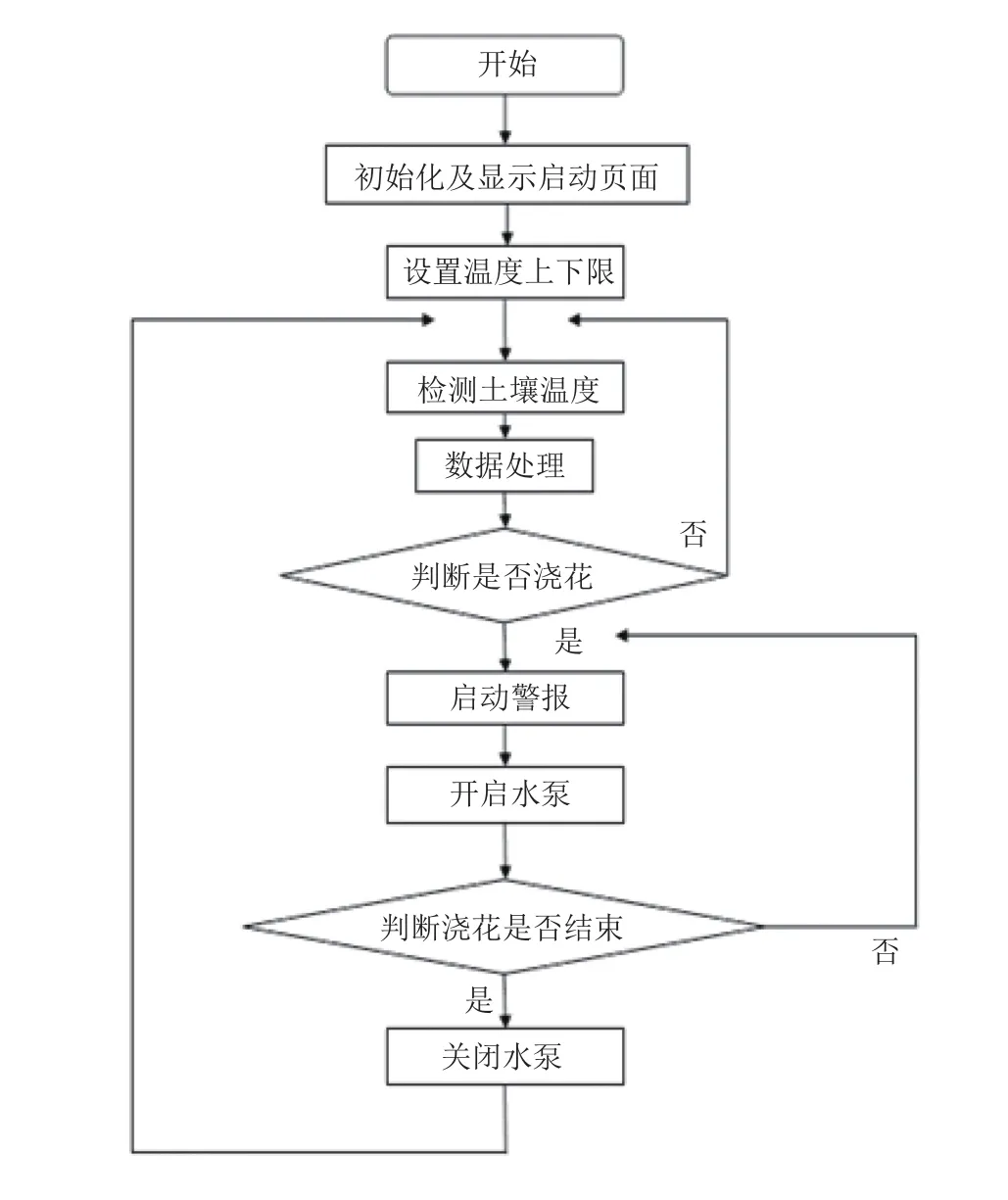
图3 自动喷灌机器人系统流程图
通过埋在土壤里的温湿度传感器采集湿度,并传回机器人内部的单片机.单片机进行处理判断,并与预设的阈值相比较.当温湿度值达到初设的最低值时,机器人内部的继电器工作,喷头触手就会进行浇灌;当温湿度值达到初设的最高数值时,继电器停止工作,喷头停止浇灌.从而实现了机器人的自动浇灌.此外,喷灌机器人内部的蜂鸣器用于浇水时的提醒报警,数码管用于观测土壤湿度的实时数据.除了自动控制模块,本文设计的机器人还配有蓝牙模块,可根据实际需求进行人工手动控制.
2.2 循迹模块设计
自动灌溉机器人在工作中必须沿田垄巡线行进,以避免损坏农作物.因此当行进方向出现偏差时,必须能够自动检测并调整.本文选用灰度传感器检测田垄位置,并完成循迹.2组7通道灰度传感器分别安装在机器人的前后部.通过这两组灰度传感器在机器人前后分别调整位置的方式,实现精确循迹.
本文设计的灰度传感器由发光二极管、光敏电阻和普通电阻焊接而成,通过发光二极管照射地面、光敏电阻接收反射光线,并将光敏电阻的电信号通过A/D转换成数字信号.当中间三个通道反馈数值较大时,机器人循迹良好;当左边两通道反馈数值较大时,机器人发生右偏移,单片机将控制机器人向左调整;同理,当右边两通道反馈数值较大时,机器人发生左偏移,需要单片机控制机器人向右调整.
3 路径规划
自动喷灌机器人实际工作的环境较为复杂,如田地的不规则性、农作物分布的不规则性等.因此需要准确的障碍物坐标和对安全距离的合理把控[7].本文提出的适用于农业大棚环境下的路径规划算法流程图如图4所示.
本文基于A*算法,结合农业大棚环境中道路的特点,按照贴边移动的行进方式,设计了一种自动喷灌机器人路径规划算法.本文提出的路径规划算法属于栅格法范畴,是一种启发式搜索算法[8].这个算法通过到达后的地的成本函数,来评价路径规划中节点的性能,并选择所要扩展的节点.
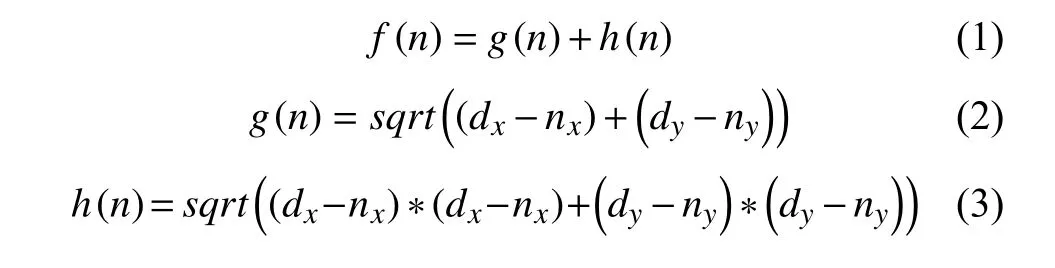
算法表达式为:f(n)表示机器人从起点经过节点n到达后的地的成本函数;g(n)表示机器人从起点到达后的地的实际能耗;h(n)表示机器人从起点到达后的地的最优路径估算能耗.当 g(n)+h(n)的值最小,即 f(n)的值最小时,为自动喷灌机器人路径规划中的最优路径.
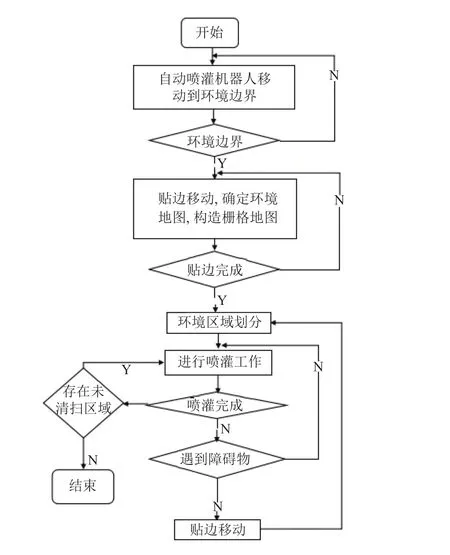
图4 自动喷灌机器人路径规划算法流程图
自动灌溉机器人从初始点到工作区域环境边的直线距离d为:

其中,x和y分别是横坐标和纵坐标,x0和y0是初始点.转向角α为:

其中,δ是初始距离,L 是大棚长度.
4 实验
为了验证本文提出的路径规划算法,本文进行了仿真实验.图5(a)中的黑点是喷灌机器人的初始位置.其他形状是障碍物.通过仿真实验可以看出,自动灌溉机器人首先按照贴边移动的方式遍历整个环境,并建立栅格地图.同时根据障碍物的位置,确定栅格大小,并划分子区域,如图 5(b)所示.当栅格模型建立后,灌溉机器人开始沿栅格长边,按照往返的方式开始灌溉,如图5(c)所示.当完成一部分区域时后,进入下一个区域以同样的方式工作,最终实现全区域喷灌作业.喷灌机器人完成喷灌任务的路线图如图5(d)所示.
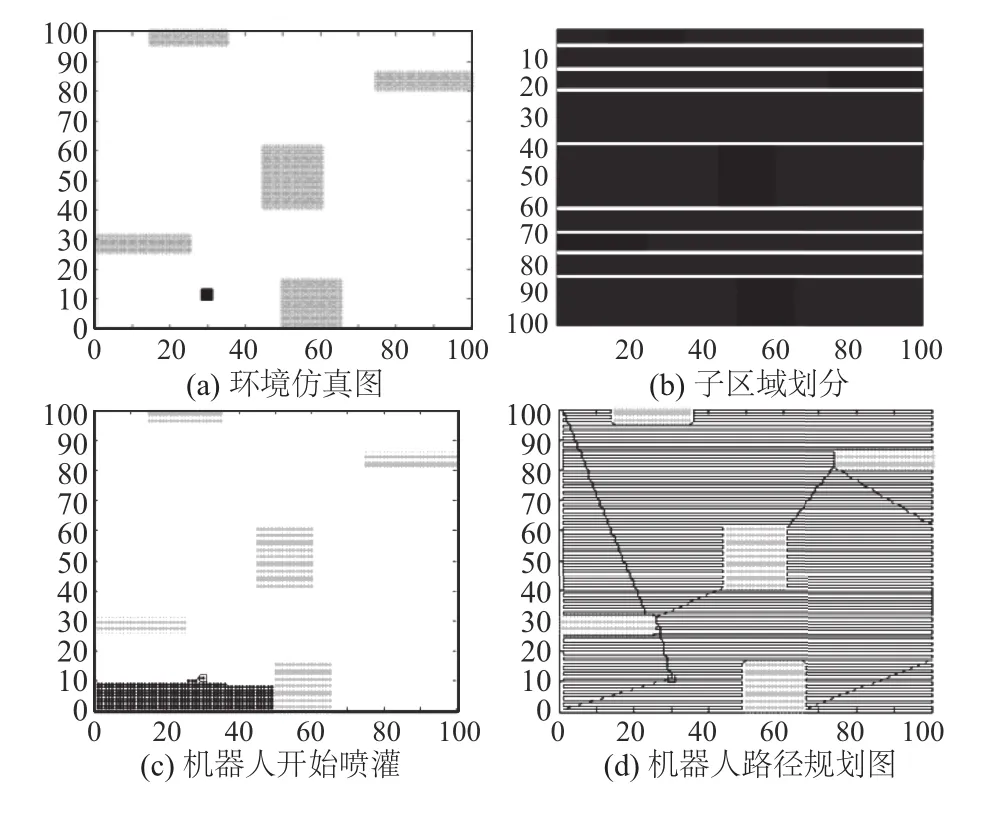
图5 机器人自动灌溉过程
5 结论
本文基于STM32单片机提出了一种自动喷灌机器人的设计与实现方案,具备循迹、温湿度检测、自动喷灌和蓝牙远程控制浇灌等实用功能.并且提出了一种基于栅格法的路径规划算法,用于大棚环境下的自动喷灌机器人路径规划.由于本文所采用的灰度传感器受环境光照影响较大,会影响机器人行进路线的精确度.因此,今后研究将提升机器人的巡线精度.
1 张立彬,计时鸣,胥芳,等.农业机器人的主要应用领域和关键技术.浙江工业大学学报,2002,30(1):36–41.
2 杨萍萍,黄晓诗,边晓蓉.农业机器人的现状与未来发展趋势.时代农机,2015,42(7):8–9.
3 贺晓龙,朱克武.自适应模糊控制在草坪灌溉机器人中的应用.农业网络信息,2009,(1):28–30.
4 开思聪,陶重犇,孙云飞.基于STM32控制的仓储搬运机器人.计算机系统应用,2016,25(7):49–54.[doi:10.15888/j.cnki.csa.005233]
5 贺晓龙,朱克武.草坪灌溉机器人定位技术的研究.自动化技术与应用,2009,28(4):71–73.
6 陶重犇,刘壮宇,孙云飞.基于嵌入式系统的搬运机器人设计与路径规划研究.计算机测量与控制,2016,24(8):215–217.
7 周立萍.基于固定全景视觉的移动机器人导航方法研究[硕士学位论文].兰州:兰州理工大学,2013.
8 朱天宇.移动机器人路径规划的研究[硕士学位论文].重庆:重庆大学,2014.
Automatic Spray Robot Based on STM32 Microcontroller
1(Tianping College of Suzhou University of Science and Technology,Suzhou 215009,China)2(Building Tntelligent and Energy Saving Key Laboratory of Jiangsu Province,Suzhou University of Science and Technology,Suzhou 215009,China)
In view of the low efficiency and high labor intensity in agricultural greenhouse,in order to improve the automation of agricultural greenhouse,an automatic spray robot based on STM32 MCU is proposed in this paper as the core controller.The robot detects lines based on gray sensors.A three-wheel differential rotation is used to control its traveling and turning.A planning algorithm suitable for greenhouse environment of agriculture is presented based on grid method.Pump switches in water tank are controlled indirectly by an electric relay,and spray process can be controlled via bluetooth remote control.Temperature and humidity sensors are used to feed real-time measurement and moisture of soil.Meanwhile,these messages are sent back for processing.Experiments show that the spray robot which is designed based on modularization is fully functioned to promote the use of agricultural robots.
STM32 MCU;agricultural robot;automatic spray;grid method
赵涛,陶重犇,冯佳佳,孙云飞.基于 STM32单片机的自动喷灌机器人.计算机系统应用,2017,26(9):279–282.http://www.c-sa.org.cn/1003-3254/5963.html
①基金项后:江苏省大学生创新项后(201613985001Y);国家自然科学基金(61401297);江苏省自然科学基金(BK20140283)
2016-12-30;采用时间:2017-01-20
ZHAO Tao1,TAO Chong-Ben2,FENG Jia-Jia2,SUN Yun-Fei2