远距离同频干扰基站定位方法研究*
2017-09-15朱金秀吴文霞唐玥杨语晨毛欢欢鄢然
朱金秀,吴文霞,唐玥,杨语晨,毛欢欢,鄢然
远距离同频干扰基站定位方法研究*
朱金秀1,吴文霞1,唐玥1,杨语晨1,毛欢欢2,鄢然1
(1.河海大学,江苏 常州 213022;2.东南大学,江苏 南京 210000)
目前东南沿海地区大气波导效应引起的远距离同频干扰现象多发,影响用户网络体验,而消除干扰的第一步就是要对远处同频干扰源进行定位。针对这一问题,利用被动雷达测距原理,提出了一种基于TDOA的三通道基站被动定位系统,利用GCC时延估计算法间接得出接收机之间的波程差,继而利用建立双曲线组,其交点即为需定位的基站位置。进行实测后得出,干扰源定位距离误差约为8.6%,大致可以定位出干扰基站的位置。
远距离同频干扰 基站定位 广义互相关时延估计 TDOA无线定位
1 引言
中国移动采用的TD-LTE系统有对频谱利用率高、上网速度快等优点。然而,随着TD-LTE网络的大规模部署,系统越来越复杂,各种过去在小范围应用中不会出现的干扰也随之产生。通过对目前东南沿海地区多发的移动4G大面积同频干扰现象进行研究后初步判断,是大气波导效应[1]引起了远距离同频干扰现象。该干扰影响了本地基站的上行用户随机接入时隙以及上行业务时隙,导致移动4G用户大规模掉线、无法顺利切换等严重问题的发生,影响了用户网络体验。为优化网络,需抑制或消除远距离同频干扰,以减少其对通信质量的影响。而抑制或消除干扰的第一步就是对产生远距离同频干扰的远端干扰基站进行定位[2]。
早期的干扰源定位方法是通过信号频域分析提取干扰信号,并朝着干扰信号的方向逐步逼近,从而定位到干扰源[3-4]。这种方法虽然操作简单,但是所需设备笨重、投资高、速度慢、工作量大。文献[5]提出在本地小区的UpPTS(Up Presentation Time Stamp,上行导频时隙)和正常上行子帧上通过检测特征序列,解析干扰小区的PCI,从而定位出干扰源。该方法虽然可以准确定位干扰源小区,但通过在帧号上周期性地发送特征序列,会使信道利用率降低。文献[6]提出根据受扰的最后一个OFDM(Orthogonal Frequency Division Multiple,正交频分复用)符号,通过大致范围的确定和受扰基站X2接口的信息交互,定位远处干扰基站。此方法虽然不影响信道利用率,但耗时久,且不稳定。
综上所述,为能快速准确地定位出远端干扰基站,本文研究被动雷达(passive radar)测距原理,发现被动雷达自身不辐射电磁波,故可通过接收由目标反射或辐射而来的信号进行定位,隐蔽性能良好,不易被发现。若雷达系统的目标自身是一个辐射源,则系统可以通过直接检测其发射的信号进行定位,如WIMAX信号[6-9]、CDMA[10]、GSM信号[11-19],而TDLTE信号也被考虑用来做被动雷达的照射源[20]。在此基础上,提出了一种基于TDOA(Time Difference of Arrival,到达时间差)[21]的三通道基站被动定位系统,并进行了实验验证和误差分析,初步解决了干扰源定位的问题,为后续进一步消除远距离同频干扰打下了基础。本算法不会增加系统负担,无需频谱分配、无电磁污染、低成本,对于目前移动4G的服务质量改善有所帮助。
2 三通道基站被动定位系统简介
2.1 系统整体框架
根据被动雷达的基本原理,定位系统自身不发射电磁波,而是利用被测基站发射的LTE信号作为系统辐射源来进行定位。系统通过三个射灯天线进行基站信号的接收,TD-LTE接收机接收1 880 MHz—1 920 MHz的基站高频信号,以20 MHz~60 MHz中频信号进行输出,并以150 MHz进行高速采样传输至上位机。上位机端有相配的软件来采集相应的信号,并将每一路采集到的信号数据以txt格式进行保存,以便将数据用GCC(Generalized Cross Correlation,广义互相关)时延估计算法[22]和TDOA无线定位算法在Matlab中进行处理。首先将三通道采集的信号数据导入,使用GCC时延估计算法对其两两进行时延估计并乘以电磁波速c得到基站到接收机1、2、3之间的波程差。最后使用TDOA无线定位算法确定任意两对双曲线,双曲线的交点即为所求基站位置。三通道被动定位系统基本流程如图1所示:

图1 三通道被动定位系统基本流程图
2.2 TDOA无线定位技术
本系统采用的TDOA无线定位算法是一种利用时间差进行定位的方法,对时间基准无依赖,成本低,且能满足精度要求。通过GCC时延估计算法可得到信号到达各个接收点的时间差(乘以波速得波程差),由于到两个不同点之间的差值为固定的值,符合双曲线上一点到两焦点之间的距离差为固定值的特点,故由此可以作出以接收点(位置已知)为焦点,波程差为实轴的双曲线,双曲线的交点即为被测站的位置。此方法具有计算量较小、定位精度较高,同时也有助于实现实时系统的优点,是目前无线定位法中常用的方法。根据被测基站到接收点之间的信号到达时间差来定位被测站,该方法中的接收点数目最少为3个,且位置均已知,利用测量到的接收点时间之间的差值来计算被测站到达接收站之间的波程差,再由波程差列出多条(至少两条)双曲线,当接收天线为定向天线时,双曲线能确定唯一交点即为被测站。本系统中的三通道被动定位算法基本原理图如图2所示:

图2 三通道基站被动定位算法基本原理图
黑点为三个接收机,红点为移动的TD-LTE基站。TD-LTE信号从基站传播到接收天线,从左至右分别为接收机3、2、1。接收天线1、2之间相距d1,接收天线2、3之间相距d2,基站到接收机1、2、3之间的波程差分别为Δd12、Δd13、Δd23。双曲线上的一点到两焦点之间的波程差为固定值,故由此可以确定一对双曲线。
假设,基站到任意两个接收天线之间的波程差Δd12、Δd13、Δd23是固定且已知的。现以接收天线1为坐标原点,则三个接收天线坐标从右至左分别为(0, 0)、(x2, y2)、(x3, y3),故可以分别列出三个双曲线,从理论上考虑,只要两个双曲线就能确定一对交点,所以只考虑两个双曲线方程,如公式(1)、公式(2)所示:
上式中(xo1, yo1)、(xo2, yo2)分别为两个双曲线的中心,即分别为接收天线1、2和接收天线1、3的中点。此时,两对双曲线确定两对交点,由到达天线的时延差值的正负可以剔除一对交点。该方法中采用的接收天线是定向天线,通过剔除与接收天线接收方向不一致的交点后,可以确定唯一一个交点,此点即是基站所在的位置,由公式(1)、公式(2)便可计算出基站相对于坐标轴原点的坐标,从而实现定位。要注意的是,这里得到的波程差是基站到接收机之间的波程差而非基站到天线之间的波程差,要得到基站到接收点之间的波程差还需减去天线到接收机之间的电缆长度。
上述算法中假设Δd12、Δd13、Δd23为已知,而事实上Δd12、Δd13、Δd23需要通过估计时延差Δt12、Δt13、Δt23得到。时延估计则由本系统的TD-LTE接收机采集到的三路信号处理可得,下一小节将对此进行介绍。
2.3 广义互相关时延估计方法
TDOA无线定位算法计算量较小,定位精度较高,同时也有利于实现实时系统,然而使用该方法首先要进行TDE(Time Delay Estimation,时间延迟估计),即获取被测站发射信号到达各接收点的时间差,其精确性直接影响到定位的准确与否。时延估计由本系统的TD-LTE接收机采集到的三路信号处理得到。本系统采用广义互相关时延估计法,计算量小,在该方法所设定的实验条件下具有较好的实验估计精度,原理如下:
设信号x(k)和y(k)是接收机1和接收机2接收到的基站信号,则x(k)和y(k)可以表示为:

其中,s(k)是接收到的基站信号,n1(k)和n2(k)是系统中的噪声信号。对x(k)和y(k)进行卷积,可得:

卷积运算符合分配律,则公式(5)可化为:

显然,信号s(k)和s(k-D)之间是有相关性的,由于ni(k)为随机噪声,所以s(k)与ni(k)不相关,公式(6)等式右边后三项可忽略不计,即:

又因为信号s(k)和s(k-D)的互相关函数即为源信号的自相关函数的移位,所以有:

公式(8)中,Rss(k)表示基站源信号s(k)的自相关函数。又因为Rss(k-D)≤Rss(0),所以当k=D时,相关函数值最大,此时的k值即为基站信号到达两个接收点的时延差估计值。由此可以将三通道信号两两互相关,获得时延差估计值Δt12、Δt13、Δt23,再将时延差乘以波速即可得到波程差Δd12、Δd13、Δd23,从而建立双曲线。对TD-LTE接收机接收的三路信号进行时延估计的流程如图3所示:
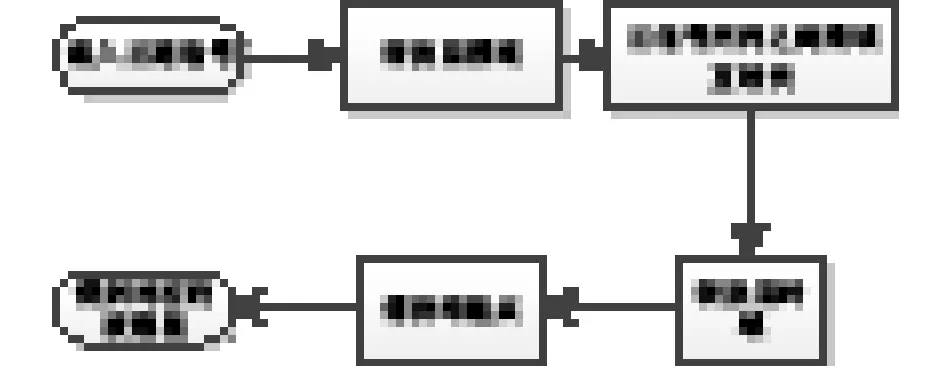
图3 GCC数据处理流程图
3 测试和结果分析
3.1 定位系统测试
如图4所示,定位系统的主要硬件包括移动基站、接收天线、TD-LTE接收机和上位机四部分。TD-LTE接收机和上位机实物如图5所示。
如图6所示,定位系统软件部分包括基于MFC(Microsoft Foundation Classes,微软基础类库)框架的信号采集软件与Matlab信号处理软件。对回传的txt文档进行读取,并用GCC法进行时延估计得到三个接收机两两之间的波程差,通过输入三个接收机的坐标,利用上文所述的TDOA定位算法实现基站位置的定位,计算出基站距离坐标原点的距离与角度。
在实测中定位到移动基站是位于河海大学常州校区图书馆屋顶的移动TD-LTE的F频段(1 880 MHz—1 900 MHz)基站。接收天线是定向的射灯天线,装置在学校招待所屋顶,如图7所示。

图4 三通道基站被动定位系统概念图

图5 TD-LTE接收机与上位机实物图
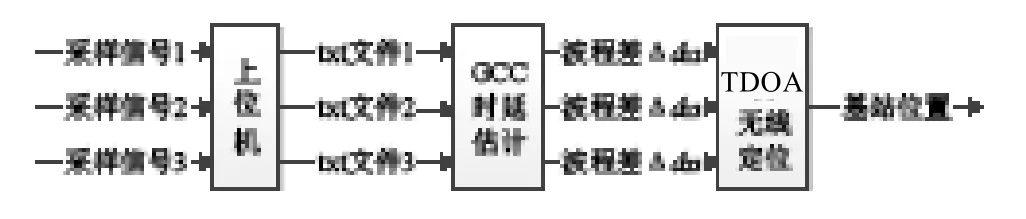
图6 三通道基站被动定位系统软件框图

图7 测试基站与接收天线图
如图7所示,利用红外线测距仪多次测量,得到X2≈11.3 m,Y3≈0.5 m,X3≈12.1m;以接收天线1为原点,则三个接收天线的坐标分别为(0, 0),(-11.3, 0),(-23.4, 0.5)。
实测步骤如下:
(1)将TD-LTE接收机各模块以及与接收天线端口的连线连接好,然后拨动信号采集板上的开关,直到信号采集板上的绿灯亮起,表明程序加载正确。
(2)安装串口驱动软件。需要说明的是,只有在电脑上初次使用上位机时需要执行此步骤。
(3)初始化上位机,配置“数据存储路径”和“串口号”两个参数,如图8所示:
图8 上位机初始化界面
(4)通过上位机进行数据采集和回传,回传结束如图9所示:

图9 数据回传结束示意图
(5)处理采集到的数据。数据内容为三个通道的采集数据,保存路径为之前设置的数据存储路径。记录文件名,并将数据代入相应的threetarget.fig程序,运行结果如图10所示,接着进行如下操作:1)选择三路信号输入;2)点击GCC按钮获得波程差;3)输入三个接收天线坐标;4)点击TDOA按钮获得基站坐标、距离与角度。

图10 三通道基站被动定位算法初始界面
3.2 测试结果分析
河海大学常州校区在百度地图中的显示比例为1 cm: 20 m。经过测量,取河海大学招待所屋顶与河海大学图书馆的直线距离约为8 cm,则按比例得出d≈160 m。
如图11所示,实验结果为:基站坐标(7, 146),距离为146.168 m,角度为87.255°,表示基站位于坐标原点的西偏南87.255°方向,距原点146.168 m处。与从百度地图所得的160 m相比,距离误差约为8.6%,相位误差约为12.4%。实验结果表明,该定位法大致可以定位出已知基站的位置。
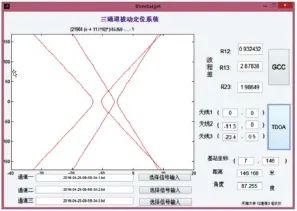
图11 三通道基站被动定位结果
3.3 误差分析
由于实验室设备的限制,测量结果的精度有限,系统中的误差主要分为相位误差和幅度误差,集中来自于噪声干扰、天线位置和电缆长度的测量误差。误差产生的主要原因分析:1)天线之间的间距是通过激光测距仪测量天线外壳之间的间距得出,与理论上要求的天线相位中心点之间的距离相比,存在一定误差,在转换成绝对坐标的过程中也产生了误差。2)在目标定位算法中,已经将三个天线到接收机的电缆长度差别考虑在内,然而,由于是先安装后测量,对三根电缆长度的测量存在一定的误差。3)由于目标与天线不在一个水平高度,且百度地图的精确度有限,d与目标到天线之间实际距离存在一定的误差。
为了降低误差,提高定位精度,建议采用先预设好天线坐标,再架设天线的方案。安装前就测定好电缆的精确长度,消除安装环境对电缆长度测量的影响。在正式测量前,架设数个绝对坐标已知的信号源作为校准目标,用以校准整个三通道被动定位系统。
4 结束语
本文针对大气波导所引起的TD-LTE远距离同频干扰源定位问题,结合被动雷达与无线定位的相关知识,提出一种三通道定位方法,用以实现对已知基站的定位。该三通道系统可接收1 880 MHz—1 920 MHz频段的信号,并将其转换为20 MHz~60 MHz的中频信号进行输出与采样,采样频率为150 MHz,而后将三通道收集到的信号相互之间进行GCC运算,得到时延差后,再根据TDOA的原理进行定位。实际测试是通过安装在河海大学常州校区招待所屋顶的三个射灯天线定位位于河海大学常州校区图书馆屋顶的移动TDLTE的F频段基站,实验结果表明,定位系统能定位移动F频段基站,定位精度初步达到设计要求,后续研究还需要聚焦于降低误差的问题。
[1] 刘宁. TD-LTE网络大气波导干扰的成因分析及防治措施[J]. 山东通信技术, 2015,35(2): 1-7.
[2] 曲嘉杰,李新,邓伟,等. TD-LTE远距离同频干扰问题研究[J]. 电信科学, 2010,26(10): 152-158.
[3] 曹群瑶. GSM无线网络干扰源定位的研究[D]. 杭州: 浙江工业大学, 2012.
[4] 朱斌. 基于实际网络的TD-LTE干扰定位及处理方法[J].移动通信, 2016,40(4): 5-9.
[5] 张育红,姜军君,王迎军. TD-LTE远端同频干扰解决方案研究[J]. 移动通信, 2016,40(4): 68-72.
[6] 汪清,侯春萍,LU Yilong. 基于固定WiMAX的被动雷达系统研究[J]. 传感器与微系统, 2010,29(10): 55-58.
[7] Griffiths H D, Garnett A J, Baker C J, et al. Bistatic radar using satelliteborne illuminators of opportunity[C]// Radar 92, Proceedings of the International Conference. Brighton, 1992: 276-279.
[8] Poullin D, Lesturgie M. Radar multistatic emissions non-cooperatives[C]//Radar 94, Proceedings of the International Conference. Paris, 1994: 370-375.
[9] Carrara B, Tourtier P, Pecot M. Radar multistatique utilistant des emetteursde television[C]//Radar 94, Proceedings of the International Conference. Paris, 1994: 426-431.
[10] Bai J X, Wang J. Weak target detection using dynamic programming TBD in CDMA based Passive Radar[C]// International Radar Conference. Guilin, China, 2009: 583-586.
[11] 任晓航,魏平. 基于GSM的被动雷达系统信号处理技术研究[J]. 中国电子科学研究院学报, 2011,6(5): 499-502.
[12] Lu Y, Tan D, Sun H. Air target detection and tracking using a multi-channel GSM based passive radar[C]// International Waveform Diversity & Design Conference. 2007: 122-126.
[13] Yilong Lu, Danny Tan, Hongbo Sun. An experimental GSM based passive radar[C]//Asia-pacific Microwave Conference. 2006: 1626-1632.
[14] X Neyt, J Raout, M Kubica, et al. Feasibility of STAP for passive GSM-based radar[C]//IEEE Conference on Radar. 2006: 6.
[15] P Samczynski, K Kulpa, M Malanowski, et al. A concept of GSM-based passive radar for vehicle traffic monitoring[C]//Microwaves, Radar & Remote Sensing Symposium. 2011: 271-274.
[16] Sun H, Tan D K P, Lu Y. Design and implementation of an experimental GSM based passive radar[C]// International Radar Conference. 2003: 418-422.
[17] Tan D K P, Sun H, Lu Y. Sea and air moving target measurements using a GSM based passive radar[C]// IEEE International Radar Conference. 2005: 783-786.
[18] Tan D K P, Sun H, Lu Y, et al. Feasibility analysis of GSM signal for passive radar[C]//Radar Conference. 2003: 425-430.
[19] Zhao Xinghao, Tao Ran, Wang Yue. Analytical expression of GSM signal ambiguity function[C]// Signal Processing International Conference. 2008: 2279-2283.
[20] 黄硕. LTE信号的被动雷达波形分析[D]. 天津: 天津大学, 2012: 69.
[21] 熊鹏,柳征,姜文利. 复合调制雷达信号时差估计算法[J]. 雷达学报, 2015,4(4): 460-466.
[22] 金中薇,姜明顺,隋青美,等. 基于广义互相关时延估计 算法的声发射定位技术[J]. 传感技术学报, 2013,26(11): 1513-1518. ★
Research on Remote Co-Frequency Interference Base Station Positioning Method
ZHU Jinxiu1, WU Wenxia1, TANG Yue1, YANG Yuchen1, MAO Huanhuan2, YAN Ran1
(1. Hohai University, Changzhou 213022, China; 2. Southeast University, Nanjing 210000, China)
With the large-scale deployment of 4G networks, TD-LTE systems become more and more complicated. At present, the phenomenon of remote co-frequency interference caused by the atmosphere duct in the southeast coastal area often occurs with the influenced user network experience, while the first step to eliminate the interference is the locate the remote co-frequency interference. In view of this problem, a three-channel passive positioning system based on TDOA and the principle of passive radar was proposed. The wave path difference between receivers is calculated based on the GCC delay estimation algorithm to establish the hyperbola set, whose intersection points are the location of the base station to be localized. The practical measure demonstrates that its interference source localization distance error is about 8.6%. Based on the result, it can be deemed that the location of the base station is approximately completed.
remote co-frequency interference base station positioning generalized cross-correlation delay estimation TDOA wireless positioning

朱金秀:副教授,博士毕业于河海大学,现任河海大学物联网工程学院硕士生导师,主要研究方向为压缩感知、信号处理。

吴文霞:本科就读于河海大学物联网工程学院,主要研究方向为现代通信系统。

唐玥:博士毕业于新加坡南洋理工大学,现任河海大学物联网工程学院讲师,主要研究方向为数字波束雷达、天线与阵列天线、无线电定位等。
10.3969/j.issn.1006-1010.2017.15.016
TN957
A
1006-1010(2017)15-0086-06
朱金秀,吴文霞,唐玥,等. 远距离同频干扰基站定位方法研究[J]. 移动通信, 2017,41(15): 86-91.
国家自然科学基金资助项目(61501172);中央高校基本业务费项目(2015B04514)
2017-01-03
责任编辑:文竹 liuwenzhu@mbcom.cn
