基于单片机的载货汽车后视镜转向随动系统
2017-09-15王丰元韩悦孙凡晴杨冉
王丰元,韩悦,孙凡晴,杨冉
(1.青岛理工大学汽车与交通学院,山东 青岛 266520;2.青岛理工大学通信与电子工程学院,山东 青岛 266520)
基于单片机的载货汽车后视镜转向随动系统
王丰元1,韩悦1,孙凡晴2,杨冉1
(1.青岛理工大学汽车与交通学院,山东 青岛 266520;2.青岛理工大学通信与电子工程学院,山东 青岛 266520)
载货汽车转弯时,固定后视镜的视野范围有限,容易引起事故,因此研究后视镜随动系统有重要意义。文章通过研究交叉路口车辆转向时的后视镜视野盲区,设计了载货汽车后视镜转向随动系统。系统输入端采用方向盘转角传感器采集数据,由STM32单片机完成数据处理,最后通过电机驱动模块控制后视镜调整电机。研究结果表明在交叉路口载货汽车转向时,后视镜随动系统能够有效改善驾驶员的后视镜视野,提高载货汽车的行驶安全性。
交叉路口;载货汽车后视镜;方向盘转角
CLC NO.:U462.1 Document Code: A Article ID: 1671-7988 (2017)15-15-04
引言
目前各种汽车上安装的后视镜都存在不同程度的盲区,驾驶视野宽度的不足使车辆在行驶中始终存在安全隐患[1]。车辆在转弯时驾驶员只能观察到同水平线上车辆的后方视野,而看不到侧方同向来车,尤其载货汽车自身高度和长度的限制,使得驾驶员对后视镜的依赖更加明显,且载货汽车货箱长度大、载货多、惯性大,转弯时存在较大的内轮差,一旦发生事故,死伤惨重。根据公安部道路交通安全研究中心的数据显示,2014年货车总量占全国汽车保有量的8%,但货车事故致死人数却达到28%[2-5]。因此提出针对改善载货汽车转向行驶过程中后视镜视野的后视镜随动系统,对提高载货汽车的行驶安全性具有重要意义。
载货汽车后视镜的控制系统主要是通过手动按钮的方式完成对后视镜的调节,并且载货汽车在转弯时的后视镜不会自动调节,导致驾驶员的视野范围很局限。后视镜智能调整技术在轿车上有一些研究成果,有研究人员根据转向灯的开启及关闭为输入信号,控制后视镜电机的启停及转动方向[6],但是这种后视镜调节方法,不能准确、实时性的为驾驶员提供最佳后视镜驾驶视野;黄科[7]等人采用单片机实现了对后视镜的自动翻转控制,提高了后视镜的调节精度,郑芳芳[8]等人基于CAN总线实现了后视镜的自动折叠展开及位置记忆功能,但都没有结合后视镜视野盲区对后视镜的转动做出调整。
鉴于目前后视镜系统的局限性,本文对载货汽车交汇路口转弯时的后视镜视野情况做了分析,采用单片机作为主控单元,以方向盘的转角作为输入信号,设计了后视镜随动系统,该系统可以实现方向盘转角数据的传输,并通过L298N后视镜电机驱动模块完成了对后视镜镜面的自适应控制,使车辆在交叉路口转弯时驾驶员的后视镜视野得到很大程度的改善,提高了载货汽车在转弯情况下的行车安全性。
1 系统硬件设计
本文所涉及的后视镜随动系统,主要由输入端、主控单元、执行端三大部分组成。其中输入端主要由方向盘转角传感器和CAN模块组成;主控单元采用STM32系列单片机作为微处理器模块的核心器件,执行算法及控制工作;执行端包括后视镜镜面控制器及电机驱动模块L298N。方向盘转角传感器采集到的转角数据,通过CAN模块传送给主控单元STM32系列单片机,STM32系列单片机将接收到的数据进行数据处理后对电机驱动模块输入端进行高低电平的控制,可以实现对后视镜镜面控制器中调整电机的正反转控制,后视镜的转动角度则通过时间控制来实现。系统的整体结构框图如图1所示。

图1 随动系统整体结构框图Fig.1 The overall structure diagram of the follow-up system
1.1 输入端的设计
该后视镜随动系统采用的是型号为C68049XF25849366 ANA76100BA的方向盘转角传感器,该型号的传感器抗干扰性能较强且工作信号稳定可靠。转角传感器的内部结构主要包括1个角度测量芯片MLX90316、5个槽型光电传感器SG278编码阵列、电源稳压电路等。转角传感器安装在方向盘下方的转向管柱上,能够检测方向盘转动角度及转动方向。
转角传感器的基本工作原理:方向盘转动时通过转向柱带动主动齿轮转动,此时从动齿轮的转动引起从动齿轮上方小磁铁周围磁场方向的改变,这种变化由MLX90316芯片检测并输出与小磁铁转动角度呈线性关系的模拟电压[9-10],此电压经DSP芯片计算得到的转角数据,然后经过CAN模块转换传送给主控单元STM32单片机。转角传感器的各引脚定义,如表1所示。
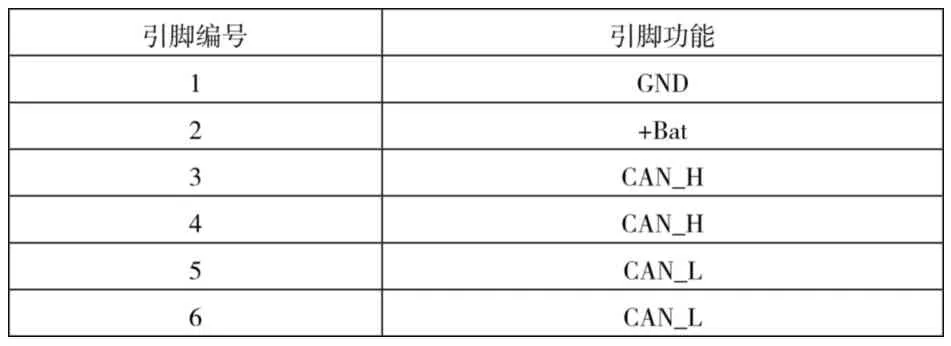
表1 转角传感器引脚功能Tab.1 pin function of angle sensor
1.2 主控单元STM32系列单片机
后视镜随动系统所采用的主控单片机型号为STM32 F103VCT6,其微控制器使用Cortex-M3内核,是由ARM公司设计,高性能、低功耗且具有价格优势,同时Thumb-2指令集具有更高的指令效率使终端的响应比以往更加迅速。与传统的单片机相比较,STM32的主频及定时器的频率通过PLL倍频能够达到72MHz,这种高分辨率的定时器提高了系统对时间控制的精确度[11]。
主控单片机的主要作用:从CAN模块接收并读取方向盘转角值;根据方向盘转角值与后视镜镜面转角的关系,及后视镜镜面的转动度,计算后视镜镜面控制器需要运行的时间,这是由芯片内部定时器的计时功能完成的;通过串口将信息传输给电机驱动模块。
1.3 执行端

图2 后视镜镜面控制器内部结构图Fig.2 Internal structure of Rear view mirror mirror controller
后视镜镜面控制器是安装在载货汽车后视镜壳里的,由两个控制镜面上下和左右转动的微型直流电机组成,其内部结构如图2所示。STM32系列单片机输出的电流比较微弱,不能直接驱动后视镜镜面控制器的调整电机,需要增加电机驱动模块对电机进行控制。因此执行端包括了L298N型电机驱动模块和后视镜镜面控制器。
后视镜调整电机转动驱动电路采用H桥式电路,电机驱动模块的电路原理图如图3所示。通过改变输入端IN3和IN4的高低电平来控制电机A的正反转与停止,改变输入端IN1 和IN2的高低电平来控制电机B的正反转与停止。

图3 电机驱动模块电路图Fig.3 Circuit diagram of Motor drive module
2 系统软件设计
2.1 交叉口盲区分析
按照《城市道路设计规范》,交叉路口车道宽度设计标准为3.5米[12],并根据载货汽车的相关数据画出车辆的简图,假定汽车能够按照理想的轨迹转弯通过路口,得到载货汽车在平面交叉路口转向时,驾驶员的视野盲区,如图4所示。
图4中的阴影面积表示车辆向左向右转弯情况下不调整后视镜所产生的盲区,根据阴影面积的大小可以直观的看出载货汽车右侧盲区比左侧的大。车辆右转时,右侧非机动车道的行人处于载货汽车的盲区范围之内,事故风险较大。

图4 交叉路口左右后视镜原视野盲区Fig.4 left and right rear view mirror blind spot in the crossroads
2.2 盲区解决办法和基本理论分析
后视镜随动系统能够检测方向盘转动角度并且随着方向盘的转动和车身的移动,缓慢调节右侧后视镜镜面向远离车身的方向移动,适当增加α的大小,右侧后视镜视野范围扩大,使右侧非机动车道的行人处于视野范围内,有效降低事故发生率,提高载货汽车的行驶安全性。
为了达到上述功能,系统执行端的后视镜镜面控制器具体参数如表2,后视镜镜面控制器电机完成一次完整的左右转动所需要的时间为6s,表2给出了该后视镜镜面控制器的工作角度大于等于26°,取后视镜镜面控制器的转动范围为26°进行研究,方向盘转动角度的范围根据车型确定,一般方向盘从直线行驶位置向右或者向左打死需要转动两圈半左右,本系统取方向盘转动角度γ的范围是-810°≤γ≤+810°。方向盘超过360°后,转角每增加10°,对应后视镜的转动角度为0.58°,根据后视镜的转动速度可得转角每增加10°需要对后视镜调整电机控制67ms。方向盘转角的绝对值与后视镜转动角度的关系如公式(2-1)。

式中,γ为方向盘转角值;
ε为后视镜镜面的转角值。

表2 后视镜镜面控制器相关参数Tab.2 related parameters of Rear view mirror mirror controller
2.3 交叉路口转弯过程中后视镜控制基本策略
交叉路口转弯后视镜随动系统的软件逻辑流程图如图5所示,首先将基于单片机的载货汽车后视镜转向随动装置进行初始化,其中初始化包括CAN模块、主控单元STM32中TIMER、SPI等部分的初始化。在检测到车速大于0的情况下即车辆的非静止状态的前提下,对CAN模块是否输出数据进行判断,若输出转角数据就可进一步对车辆行驶方向进行判断,数据大于0为左转,数据小于0则为右转。
实车试验证明方向盘转动在360°之内,对驾驶员视野的影响不大,因此设定CAN模块输出的转角数据大于360°时随动装置开始启动。根据采集到的方向盘转角信息判断方向盘转角值是否发生变化,随着接收到转角数据的增大,右侧后视镜向外侧旋转,外视野区逐渐增大。以交汇路口车辆右转为例,在检测到转角数据小于0的情况下,若方向盘转角角度值在360°以内,则系统不启动,后视镜镜面不发生变化;如果方向盘的转角角度超过360°且短时间内持续变化,此时驾驶员不断调整方向盘的角度,即车辆处于转弯或者变道的情况下,后视镜调整电机启动控制后视镜镜面向远离车身的方向的转动,镜面的转动角度通过控制电机的时间来完成。

图5 软件逻辑流程图Fig.5 Software logic flow chart
3 系统试验测试
3.1 系统数据接收与传输测试
对系统中方向盘转角数据的采集与传输通过上位机软件进行测试,方向盘转动的角度通过CAN模块实时传输到上位机,接收到的方向盘转角数据通过串口在PC机上显示。观察测试过程可知上位机软件中转角的变化范围在-810°—+810°之间,同时,导出软件中一段时间的转角读数如表3所示,正为左转,负为右转。因此可知该系统能够完成对方向盘转角数据的采集与传输,能够满足车辆转弯情况下对信息采集实时性的要求。

表3 上位机转角读数Tab.3 PC angle readings
3.2 方向盘转角与后视镜镜面转角的关系
试验测试得到的方向盘转角与后视镜镜面转角的对应关系如下表4所示。通过分析实验结果和理论数据可知,试验测得的数据与理论数据相符,表明该系统可以较好的达到改善车辆交叉路口转弯时后视镜视野的功能。

表4 方向盘转角与后视镜镜面转角数据Table4 angledataofsteeringwheelangleandrearviewmirrormirror
4 总结
本文通过对载货汽车在交叉路口转弯时盲区的分析,设计了基于单片机的转向随动系统。在合理的对该系统中硬件和软件的设计进行优化配比后,该系统在转弯过程中,后视镜镜面可随方向盘的转动而做出自适应调整,增大右侧后视镜视野范围,并明显提高载货汽车在交叉路口的行驶安全性,在载货汽车上的应用前景极大。
[1] 王琛玮,杨林,程雨恒,昝欢,雷傲寒.基于航向角的汽车后视镜转动规律研究[J].中国高新技术企业,2016,(29):23-26.
[2] 钱红波,王睿弩,谭晓艳.大货车交通事故特征分析与预防对策研究[J].交通信息与安全,2013,(05):98-103.
[3] 孙薇.大货车交通事故致因机理及对策研究[D].重庆交通大学,2014.
[4] 孙国君.基于大货车转向轮差面积的估算及安全分析[J].自动化与仪器仪表,2016,(03):98-99.
[5] 王述建.基于复杂路况的大货车后视镜视野检测研究[J].交通标准化,2012,(10):118-121.
[6] 何雍奥,张卫波.新款汽车后视镜自动调节装置的研发[J].海峡科学,2010,(12):41-43.
[7] 李海涛,姜锐,黄科.基于单片机控制的自动翻转后视镜的设计[J].科技资讯,2010,(12):43-44.
[8] 郑芳芳,李娟,刘成厚,关宁,崔凤凯.一种基于CAN总线的汽车后视镜控制系统[J].农业装备与车辆工程,2014,(02):44-47.
[9] 陈富安,李江江.迈锐宝等汽车用方向盘转角传感器工作原理研究[J].汽车实用技术,2015,(04):4-6.
[10] 杨超,韩峻峰,郭毅锋,田博.基于MLX90316的方向盘转角检测系统设计[J].科技视界,2016,(02):269-270.
[11] 周辉.STM32单片机的高精度超声波测距系统的设计[J].数字技术与应用,2015,(10):20.
The Follow-up System of Car Rearview Mirror Based on Single Chip Microcomputer
Wang Fengyuan1, Han yue1, Sun Fanqing2, Yang Ran1
(1.College of Automobile and Transportation, Qingdao University of Technology, Shandong Qingdao 266520; 2.College of College of Communication and Electronic Engineering, Qingdao University of Technology, Shandong Qingdao 266520)
When the truck turns, the fixed rearview mirror has a limited field of view, which may cause an accident. Therefore, it is important to study the rearview mirror follower system.In this paper, a vehicle rearview mirror steering follower system was designed by studying the blind spot of dynamic rearview mirror when the truck was was changing direction at the crossroads. The input module of the system used the steering wheel angle sensor to collect the data. And then used the STM32 microcontroller to complete the processing of data, and finally controlled rearview mirror motor through the motor drive module. The results showed that the rearview mirror follow-up system can effectively reduce the blind spot of the rearview mirror and improve the driving safety of the truck when the truck was changing direction at the crossroads.
Crossroads; Truck rearview mirror; Steering wheel angle
U462.1
A
1671-7988(2017)15-15-04
王丰元(1963-),男,博士,教授,就职于青岛理工大学。主要研究方向:智能汽车,车辆人机工程。
10.16638/j.cnki.1671-7988.2017.15.006
