一种雷达数据处理仿真模型中分布式组网数据融合的实现方法
2017-09-14解放军93861部队任慧斌
解放军93861部队 寇 伟 庄 瑾 任慧斌
一种雷达数据处理仿真模型中分布式组网数据融合的实现方法
解放军93861部队 寇 伟 庄 瑾 任慧斌
本文根据某型雷达事后数据分析的样式,采用仿真技术对组网数据进行融合分析,形成了一种通用化的组网数据融合方法。
雷达;分布式组网;数据融合
1. 引言
根据雷达的分类,事后数据分析及处理过程也存在很大差异,尤其是在多信息源的雷达进行组网,相对于单台设备,优势更加明显,数据进行组网融合后,系统具备更稳定的目标跟踪能力,更高的跟踪精度、扩大了各站对空中信息识别的空域范围,共享的数据信息更加准确和高效,可靠性和抗干扰性能也有一定程度的提升。
2. 分布式组网数据融合
通过仿真设计,采用了分布式的组网模式如下图2.1所示,网络中的各个节点(各雷达台站)具备各自的数据处理模块,能够对获取的空域的数据信息进行预判和预处理,同时将这些数据进行整理打包上传至上级中心节点,通过坐标转换后,中心节点将所有下级节点发送来的空域内目标数据信息进行融合和整理,最后形成更加有效的目标信息。
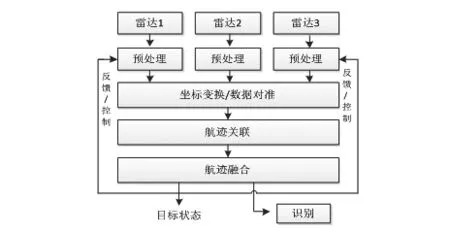
图2.1 分布式雷达网结构图
3. 分布式组网数据融合的实现方法
3.1 关联算法
现在各型雷达均具备航迹的跟踪及装订功能,从优先级和实时性的角度去考虑,在分布式组网中就不重复进行此项工作,而是由各型雷达通过不同的目标判断后采用相应的滤波方式进行跟踪,并关联航迹,完成后上传至上级数据中心节点,通过坐标转换后进行精度对比检查工作。航迹关联检查,可以采用K/M法则,把两条航迹进行M次关联,如有大于或等于K次关联,则通过检查。[1]在上级中心节点中,而对于两条航迹的精度检查我们可以采用时间统一对比法,在第一条航迹中选取滤波状态、滤波协方差、时间信息等M个滤波点的数据,在第二条航迹中选择与第一条时间信息最接近的M个点,进行时间轴统一后,进行关联检查。

不考虑目标运动过程噪声的情况下,假定两个状态误差的假设相互独立。状态估计的差为:

真实状态差值如下:

两个状态来自同一目标的假设为:

相反的,两个状态来自不同目标的假设为:

两个估计状态差的误差是:


假设两个状态误差相互独立,


按照上述的方法,依次对雷达a与b的所有航迹进行两两关联,统计关联结果和距离,加以判断。如果一条航迹按照K/M法则与多条航迹关联,则比较关联次数,取关联次数多的那条;如果次数相同,则取总的关联距离最小的那条。[2]最终结果可为一条航与另一条航迹相关联,也可为与任何航迹无关联。
3.2 融合算法
提高跟踪精度可采用对关联上的航迹进行时间配准,使用加权概率融合关联上的航迹。[3]假设在同一时间雷达1的协方差为K1,滤波值为P1,雷达N的协方差为KN,滤波值为PN,那么可得其在融合之后的协方差以及融合值:

4. 结束语
本文提供了一种在仿真模型中的分布式组网雷达数据融合的基本处理方式,对雷达组网的多样性设计和融合策略提供了一些基本思路。
[1]赵艳丽,陈永光,汪连栋,申磊.组网雷达的半实物分时仿真方法[J].火力与指挥控制, 2011(12).
[2]李昌锦,陈永光,沈阳,李修.和电子战环境下组网雷达检测性能分析与仿真[J].火力与指挥控制,2007(01).
[3]花汉兵.雷达组网的特点及其关键技术研究[J].现代电子技术,2007(23).
寇伟(1981-),男,陕西西安人,工程师,研究方向:雷达工程。
