一种粗略到精确的电力设备热故障定位方法
2017-09-14重庆理工大学电气与电子工程学院李云昊刘增里
重庆理工大学电气与电子工程学院 张 莲 李云昊 刘增里 王 磊
一种粗略到精确的电力设备热故障定位方法
重庆理工大学电气与电子工程学院 张 莲 李云昊 刘增里 王 磊
在电力系统运行中,电力设备发热故障给电力系统的稳定性和安全性带来重大隐患。使用红外热像仪对电力设备热故障进行智能诊断已成为重要课题。其中,准确,高效的故障定位可以大大提高智能诊断的准确性,提高诊断效率。文章提出一种从粗略到精确的电力设备热故障定位方法,该方法通过结合伽马变换和OSTU灰度阈值变换对故障设备进行粗略定位,然后利用灰度重心算法对分割出的发热设备进行计算,可以精确定位到发热设备内一点。该方法相对于传统的只提取发热设备图像作为结果的方法具有更精确的结果,可适用于大部分发热故障的红外热像图,且对之后的设备识别工作具有重要意义。
红外热像仪;故障定位;灰度重心;热故障
0 引言
电力设备运行时,由于绝缘老化,接触不良等各种原因引起的设备发热故障,如常见的隔离开关发热,电阻损耗发热,导线线夹发热等,为电网运行安全带来重大隐患,严重时造成设备退出运行,甚至火灾。因此,电力设备的热故障检测是电力设备安全研究的重要课题之一。
传统的电力设备热故障检测采用停电检修的方式,费时费力,随着红外热成像仪的引进,如今的热故障检测方式普遍采用红外热像仪对电力设备进行检测。与传统方法相比,红外热像仪可以实现远距离,不取样,不触体,不断电,又具有准确,快速直观等特点[1]。如今,固定式红外热成像探头已经在各变电站等场所普及,但仍需工作人员在数据接收端对故障进行人工判定。实现电力设备热故障的智能诊断主要分为三个步骤[2],首先从红外热像图中定位发热设备;识别发热设备;最后对发热设备进行诊断,判断其是否发生故障。其中最关键的一步就是对发热设备的定位,能否精确定位发热设备决定着是否能够准确识别故障。传统方法对电力设备红外热像图进行简单的阈值分割或分水岭算法分割出发热部位[3],这些方法分割出来的发热部位往往包含许多非感兴趣区域图像或丢失许多感兴趣区域图像,严重影响之后发热部位识别的准确性。从而严重降低了整个智能诊断的准确性和效率。本文提出一种粗略到精确的电气设备红外热故障定位方法,先粗略定位再精确定位,定位结果准确到发热设备内一点。
1 发热部位的粗略提取
1.1 电力设备红外热像图特性
红外热成像技术是基于自然界中一切温度高于绝对零度(-273.15°C)的物体,每时每刻都辐射出红外线的原理[4],同时由于这种红外辐射都载有物体状态的特征信息,可以利用红外技术判别各种被测目标的温度高低和温度分布情况[5]。在电力设备中,其发热故障部位一般为由发热中心向外辐射的温度场,在其红外热像图中可以清晰看出发热故障部位。

图1 变压器套管发热故障
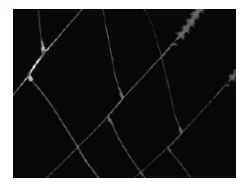
图2 线夹发热故障
在图像分割中,由于发热设备的多样性以及拍摄时环境因素的影响,使用单一的灰度阈值变换无法选用合适的自适应系数适用于各种图像,一些学者提出了各种改进方法,如熊芬芳等人提出的基于MSER和mean-shift算法的电力设备红外热故障定位得到较好的结果[6],但这些算法普遍迭代次数过多,算法效率太低。文章在故障的粗略定位中采用伽马变换结合OSTU自适应灰度阈值变换分割出发热部位图像,结果准确且算法简洁。
1.2 图像对比度伽马变化
在实际拍摄情况下,一些图片偏亮,一些图片偏暗,使得其灰度化后目标区域的灰度值与背景的灰度值相差不同,不便于我们对故障部位进行图像分割,所以我们首先要做的是对灰度化后的图像进行对比度调整。
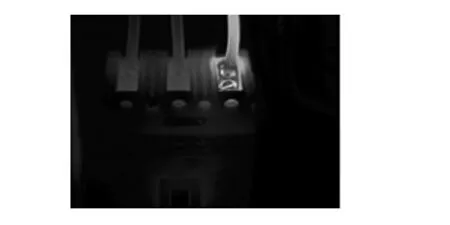
图3 灰度变换后的图像
由图3可知,灰度化后,发热部位亮度明显高于其他区域,我们将其设为目标区域,而将其他区域设为背景区域。如果将目标区域的亮度继续提高的同时降低背景区域的亮度,目标区域则会更加明显。利用伽马变换,可以有效的达到这一目的,公式如下:

公式(5)中,x与y的取值范围均为[0, 1],esp为补偿系数,为伽马系数。伽马变换曲线如图4所示:
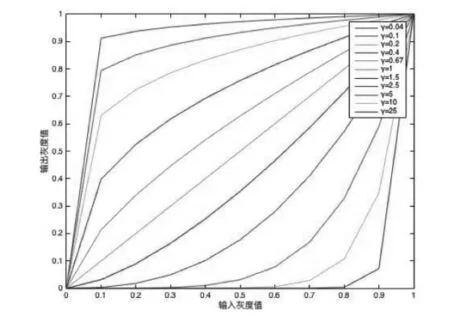
图4 伽马变换
如图4我们可以看到,当系数增大时,灰度值高的点将会被放大,而灰度值较低的点将会被缩小,在伽马变换实际应用中,经实验得知系数取2.5时可以满足大部分图像变换需求,一些特殊情况将在下一章中给出解决方法。热故障灰度图像伽马变换结果及其对应直方图对比如图5所示。

图5 伽马变换后的图像及其直方图对比
1.3 自适应灰度阈值变换
灰度阈值变换可以将一副灰度图像转换为灰度值为0和255的黑白二值图像。指定一个阈值,高于此阈值的像素点灰度值设为255,而低于此阈值的像素点灰度值设为0。由此得到由0和255组成的黑白二值图像。在灰度阈值变换中,由于每幅图像发热部位形状以及噪声不同,很难设定一个阈值可以适用于所有图像,所以,如何自适应的选择阈值是灰度阈值变换的重要问题。
文章采用OSTU自适应灰度阈值变换对图像进行二值化处理。该算法将一幅图像依据其灰度分布特性分为前景和背景两部分,前景和背景的类间方差越大,说明前景和背景的差别越大,当将前景错分为背景或背景错分为前景都会导致两部分的类间方差减小。因此,类间方差最大情况下的分割意味着错分概率最小[7]。
设当前景与背景分隔阈值为t时,前景点占图像比例为,均值为,背景点占图像比例为,均值为。则整个图像的平均灰度为:


采用遍历的方法求得类间方差最大值,即为所求最佳阈值分割。阈值分割后的结果如图6所示:

图6 OSTU阈值分割

图7 灰度中心算法处理结果
伽马变换后的图像结合OSTU自适应阈值分割处理可以自适应的分离出发热部分,结果精确,可适用于绝大多数图像。
2 故障的精确定位
2.1 灰度重心算法
从根据上一步的算法分离出电力设备中发热的设备,从结果上看这些部位大多都以完整或不完整的多边形组成,使用灰度重心算法可以求得发热设备的型心,其结果为发热设备内部一点。
灰度重心算法是一种中心点提取算法[7],一般有两种方法,一种是把灰度平方作为权值的加权型心算法,设目标的中心为,可表示为如下形式:

另一种则是将区域内每一个坐标的灰度值当作该点的“质量”,求其“能量”中心点,公式如下:

由灰度重心算法公式可知,灰度重心算法原理与加权平均算法相同,稳定性较高。由于上述公式是对图像的灰度值进行加权,因此文章采用一种适用于二值化图像的特殊情况的灰度重心算法,公式如下:

处理后的结果如图7所示。
2.2 特殊情况的处理
在实际检测中,会遇到极少数图像检测失败,如图8所示。
对于图8,检测结果偏移到图像以外灰度值为255的黑色区域,此情况发生的原因是由于伽马变换和OSTU自适应二值化配合无法将发热部位准确提取出来,最终导致灰度重心算法计算出的型心不在图像内。此时只需设置程序,当检测到定位到的坐标的灰度值部位0是,则将将伽马系数增加0.5即可得到准确结果,如图9所示。
3 实验结果分析
文章将所采用方法在matlab上进行变成验证,对不同电力设备的红外热像图进行故障定位,所得结果精确。实验结果如图10,11,12所示。

图8 35kv电缆绝缘烧毁故障处理结果(γ=2.5)
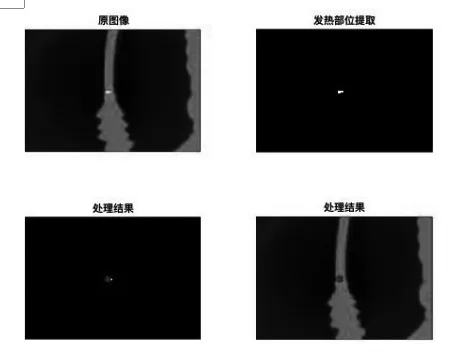
图9 35kv电缆绝缘烧毁故障处理结果(γ=3)
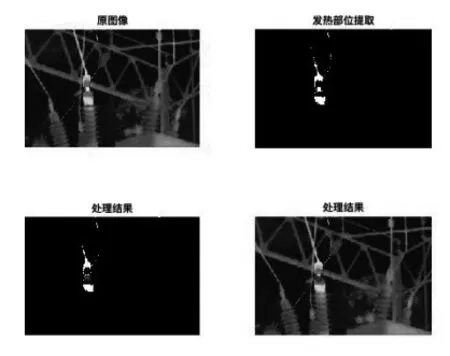
图10 高压套管故障
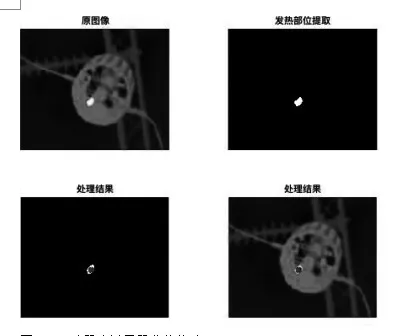
图11 阻波器内避雷器发热故障
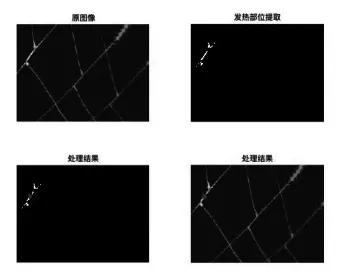
图12 线夹发热故障
4 结束语
文章针对电力设备发热故障定位,提出一种粗略到精确地电力设备热故障定位方法。该算法结合伽马变换和OSTU自适应灰度阈值算法,粗略提取发热部位二值图像,再使用灰度重心算法计算发热部位型心。经实验表明,该算法适用各种不同设备的故障定位,且结果精确,算法简洁。此方法对于之后的设备识别有着重要意义。
[1]曹海洋,张玉成,朱启伟,赵强.基于红外成像技术的变压器热故障在线检测与诊断[J].实验室研究与探索,2012,02:30-32+40.
[2]Jadin.M.S,Taib.S.Recent progress in diagnosing the reliability of electrical equipment by using infrared thermography[J].Infrared Physics & Technology,2012,55(4):236-245.
[3]Laurentys A.C.A,Braga A.P,Nascimento.S,et al.Intelligent thermographic diagnostic applied to surge arresters: a new approach[J]. IEEE Transactions on Power Delivery,2009,24(2):751-757.
[4]陈衡.红外热像仪在电力设备系统中故障诊断应用概况[J].激光与红外,1994,03:8-11.
[5]张启清,吕厚余,黄选发,唐昆明.电力变压器故障红外诊断专家系统[J].电网技术,2002,09:18-21.
[6]熊芬芳.基于图像处理技术的电气设备故障诊断方法研究[D].东华大学,2015.
[7]张小艳,王晓强,白福忠,田朝平,梅秀庄.基于改进灰度重心法的光带中心提取算法[J].激光与红外,2016,05:622-626.
[8]王晓华,赵志雄.结合伽马变换和小波变换的PCA人脸识别算法[J].计算机工程与应用,2016,05:190-193.
[9]孙力.基于ROI与自适应Ostu相结合的图像分割算法[J].现代电子技术,2011,06:1-3.
