GLONASS对跖卫星对导航接收机定位功能影响分析
2017-09-14杨东旭郭恳平丁亚玲
刘 庆,杨东旭,吴 翔,郭恳平,丁亚玲
(上海航天电子技术研究所,上海 201109)
GLONASS对跖卫星对导航接收机定位功能影响分析
刘 庆,杨东旭,吴 翔,郭恳平,丁亚玲
(上海航天电子技术研究所,上海 201109)
针对运行于较高高度的航天用户,因会同时接收到GLONASS对跖卫星信号但无法区分而可能影响接收机定位功能的问题,分析了对跖卫星失锁重捕后因位置与伪距不对应,对接收机定位性能产生影响或导致解算出错的机理,发现当接收机工作高度大于208 km时需考虑对跖卫星的影响。讨论了对跖卫星对接收机影响的发生条件,将其归为对跖卫星两星仰角均小于5°和一星大于等于5°、一星小于5°的两种场景。给出了工作高度大于208 km且小于1 700 km、工作高度大于1 700 km,以及高轨应用时消除对跖卫星影响的解决方法。用卫星信号模拟器对两种场景的影响进行了仿真并对所提方法进行测试验证。结果表明:给出的方案能有效解决GLONASS对跖卫星引起的接收问题。研究可为兼容GLONASS信号的导航接收机的开发、测试和使用提供参考,对高可靠性航天用户导航接收机的设计有一定的工程实用价值。
GLONASS; 对跖卫星; 接收机; 定位; 仰角; 工作高度; 失锁; 重捕
0 引言
GLONASS系统由前苏联开发、现由俄罗斯继承,是继美国GPS系统之后第二个投入运行的全球卫星导航系统。与其他导航系统采用的码分多址(CDMA)方式不同,GLONASS系统采用了频分多址(FDMA),通过在不同的载波频率上发射信号实现不同卫星信号的区分,同时卫星信号中的导航电文又经相同的伪码调制作为测距码。通过这种方式,GLONASS信号具有更好的抗窄带干扰能力,也减小了不同卫星信号间的互相关干扰[1-2]。
为在GLONASS卫星发射的两个民用信号G1,G2波段产生不同的载波频率,最初GLONASS系统采用的频道号K值为0~24且每颗卫星各不相同[3]。但因G1波段的高频部分与无线电天文研究和部分商用卫星通信服务的波段存在重叠与冲突,故在国际电信联盟(ITU)的要求下,GLONASS系统放弃使用原信号波段中高于1 610.6 MHz的高频部分,并将相同的频道号K分配给对跖卫星(在同一轨道上位置相隔180°的两颗卫星),以解决由于让出高频部分产生的波段总带宽变窄的问题[4]。目前,GLONASS系统接口控制文件中规定频道号K值的范围为-7~6[5]。
因对跖卫星具载波频率相同、调制伪码相同的特点,故在未解调出导航电文前卫星导航接收机无法区分对跖卫星。虽然各类海陆空用户接收机通常不会同时观测到任何一对对跖卫星,但运行高度较高的航天用户接收机易同时接收到GLONASS对跖卫星的同频信号。若同时接收到对跖卫星的信号,则可能导致接收机出现差错。文献[6]介绍了俄罗斯科罗廖夫能源火箭公司在联盟号火箭与和平号空间站交会对接的任务过程中,对GPS/GLONASS双系统导航接收机进行了测试,发现接收机出现受对跖卫星影响而无法定位,但未进一步分析影响发生的条件及解决措施。国内外文献对GLONASS对跖卫星引起的接收机定位问题及发生条件也鲜有论述。为此,本文分析了对跖卫星对定位解算影响的机理,讨论了对跖卫星影响接收机的两种场景并分析产生影响的条件,针对每种场景给出了相应的解决方案。
1 对跖卫星对定位解算影响机理
接收机定位方程可表示为
(1)
式中:n为用户观测到的可参与定位的卫星数;(x,y,z),δtu分别为用户在坐标系中的位置和钟差;c为光速;(xn,yn,zn)为第n颗卫星的位置;ρn为用户与第n颗卫星间的伪距[7-8]。
当每颗卫星的位置与伪距都一一对应时,接收机可正确解算出位置信息,但若有1颗及以上的卫星位置与伪距不一致,则会使接收机定位解算出错。设接收机捕获跟踪的第n+1颗卫星(与第n颗卫星为一对对跖卫星),其位置为(xn+1,yn+1,zn+1),伪距为ρn+1,正常情况下,接收机可通过这n+1颗卫星进行定位解算,但当接收机中有GLONASS卫星参与定位且受对跖卫星影响时,第n+1颗卫星的位置与伪距会出现不一致的情况,即位置会变为对跖卫星的位置(xn,yn,zn),而伪距仍是ρn+1。这导致定位方程变为
(2)
式中:Δρ=ρn+1-ρn。因此,在定位解算过程中会引入Δρ的误差,从而导致定位结果出错。
此外,对兼容GLONASS信号的接收机(N个系统,单系统时N=1),至少需要N+3颗可参与定位的卫星,才能解算出位置信息[9]。当接收机受GLONASS对跖卫星影响时,原本可参与定位的卫星会被接收机误判为不可参与定位,极端情况下会导致接收机因可参与定位卫星数不足而无法定位。
2 对跖卫星对接收机的影响分析
对近地应用的接收机来说,为减小低仰角卫星带来的较大测量误差和定位误差,一般取可用于定位的卫星仰角门限为5°,仰角低于5°的卫星不参与定位解算[9]。定义一对对跖卫星Sat1,Sat2,则可能有以下两种场景对接收机产生影响。
a)场景1:Sat1仰角<5°,Sat2<5°。
b)场景2:Sat1仰角≥5°,Sat2<5°(或Sat1<5°,Sat2≥5°)。
目前GLONASS对跖卫星共有12组,在仰角5°~90°范围内的可见卫星可参与定位解算。以下分析上述两种场景对跖卫星对接收机的影响及产生影响的条件。
2.1场景1
2.1.1 影响
场景1中,对跖卫星Sat1,Sat2的仰角都小于5°门限,均不可参与定位解算。
如接收机对Sat1失锁,后重捕到Sat2,因Sat1,Sat2为对跖卫星,接收机无法区分,会使用Sat1的星历计算Sat2的位置。但此时Sat2的仰角小于5°,不参与定位,不会对定位解算产生影响。
假设随着卫星和接收机的运动,Sat2的仰角不断增大,Sat1的仰角不断减小。当Sat2的真实仰角大于5°可参与定位时,由于接收机仍在使用Sat1的星历计算Sat2的位置,导致接收机解算出的Sat2的仰角仍是Sat1的仰角(小于5°,并在不断减小),致使Sat2无法参与定位。该情况虽不会导致接收机定位错误,但可能会使接收机因可参与定位卫星数少于最低可定位卫星数而无法进行定位解算,影响了接收机的定位性能。
对单GLONASS系统接收机,发生上述情况可能使可参与定位的GLONASS卫星数少于4,或对兼容GLONASS信号的N系统接收机,发生上述情况可能使可参与定位的卫星数少于N+3颗,若无消除对跖卫星影响的措施,则会导致接收机无法进行定位解算。
2.1.2 产生条件
由于地球遮挡,运行高度较低的用户不会同时观测到仰角均小于5°的对跖卫星。但当高度增大到一定时,会出现场景1,从而给用户接收机带来隐患。以下分析场景1的产生条件。
如图1所示,Sat1,Sat2是一组对跖卫星,用户接收机在点C,其相对Sat1,Sat2的仰角均小于5°。分别以点A、B为起点向地球作切线,当用户接收机位于两条切线的交点时,则恰好出现场景1。
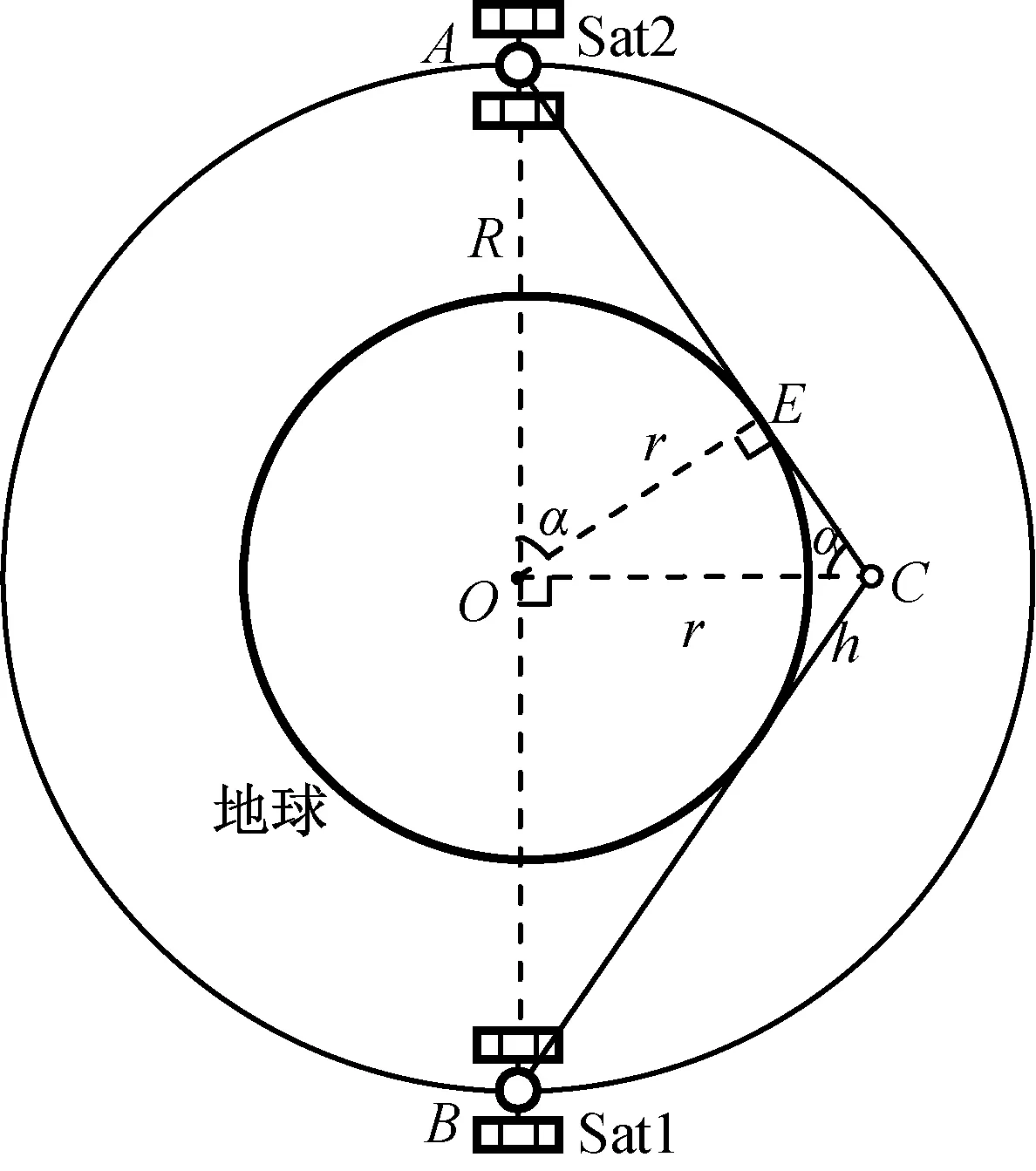
图1 对跖卫星位置(仰角Sat1<5°, Sat2<5°)Fig.1 Position of antipodal satellites (elevation of Sat1<5°, Sat2<5°)
设地球中心为点O,接收机运行轨道高度为h。地球半径r=6 370 km,GLONASS卫星轨道半径R=25 508 km。AC,BC是地球的两条切线,点E为切线AC与地球的交点。在△AOE,△ECO中由三角定理可得
(3)
(4)
由式(3)、(4)可算得h≈208 km,即当用户工作高度大于约208 km时,场景1就可能出现。
2.2场景2
2.2.1 影响
对跖卫星中的Sat1仰角大于等于5°门限,可参与定位解算,Sat2仰角小于5°,不参与定位。
如接收机对Sat2失锁,后重捕到Sat1,但因使用Sat2的星历计算Sat1的位置,导致Sat1无法参与定位,此时可能会使接收机因可参与定位卫星数少于最低可定位卫星数而无法进行定位解算,影响了接收机的定位性能。此情况可归于场景1。
如接收机对Sat1失锁,后重捕到Sat2,因Sat1,Sat2的频点和伪码均相同,接收机会误认为重捕到的仍是Sat1,并使用Sat1的星历,而测量的伪距则是Sat2的伪距,这导致定位方程中的卫星位置与伪距不一致,致使定位出错,此情况定义为场景2。无论单GLONASS系统接收机还是兼容GLONASS信号的多系统接收机,一旦发生上述情况,若无消除对跖卫星影响的措施,则均会导致接收机定位结果出错。
2.2.2 产生条件
由于地球遮挡及仰角门限,运行高度较低的用户不会同时观测到Sat1≥5°,Sat2<5°的对跖卫星。但当高度增大到一定时,会出现场景2,从而给用户接收机带来隐患。以下分析场景2的产生条件。
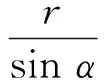
如图2所示,Sat1和Sat2,Sat3和Sat4是两组对跖卫星;用户接收机在点C,其对Sat1的仰角为5°,对Sat3的仰角为90°。因Sat4被地球遮挡,接收机对其不可见,只能观测到Sat3,Sat4对跖卫星中的一颗。在相对接收机仰角5°~90°的范围内,出现场景2的临界条件是:接收机相对Sat1卫星仰角恰为5°,同时可观测到对跖卫星Sat2。
设地球中心为点O,以点C为起点向地球作切线,交点为E。当β=α时,Sat2刚好相对接收机可见,且仰角小于5°,此为场景2。图2中:β即为∠ACO,α即为∠ECO。以下分析接收机高度h满足的条件。
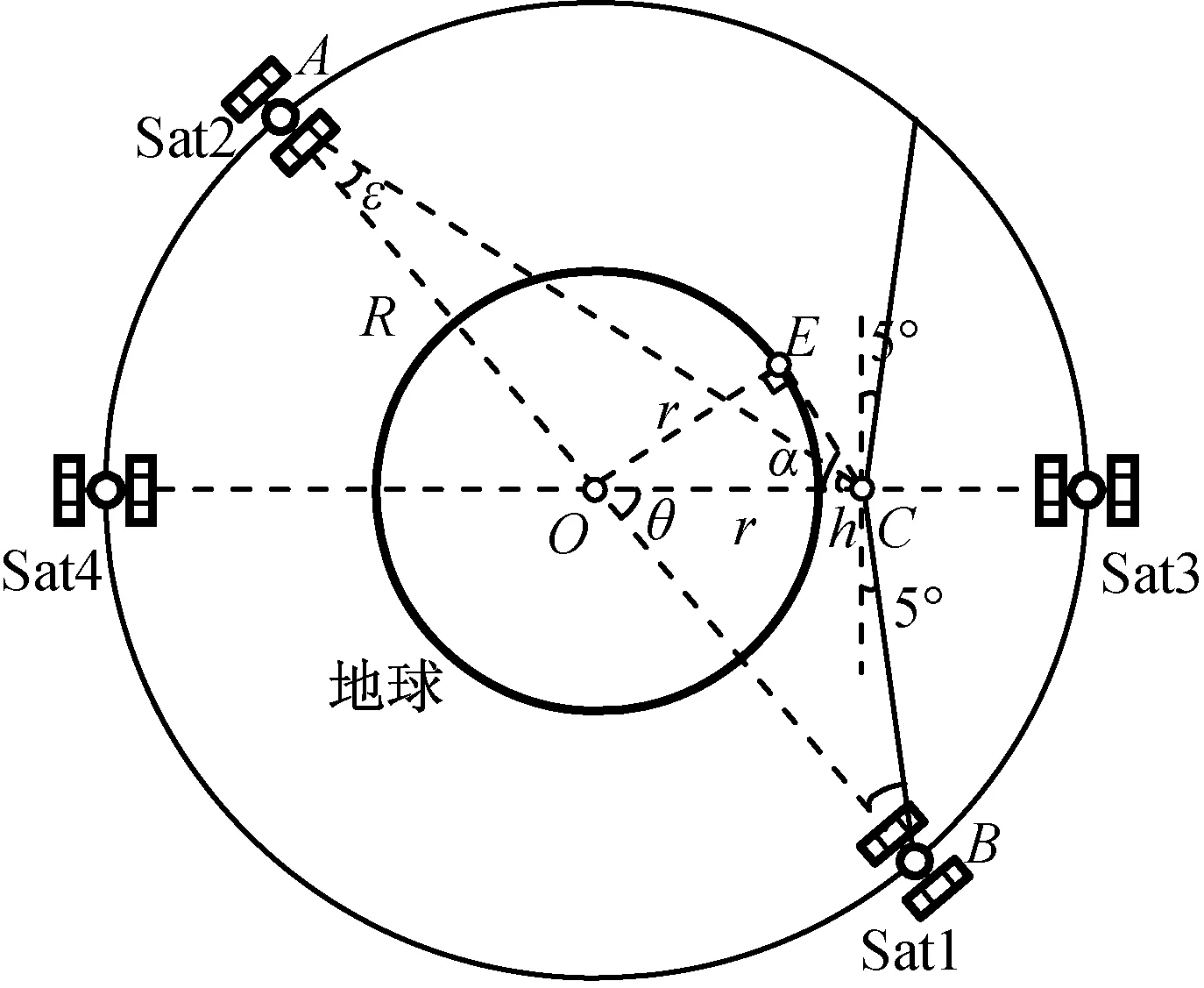
图2 对跖卫星位置(仰角Sat1=5°,Sat2<5°)Fig.2 Position of antipodal satellites (elevation of Sat1=5°, Sat2<5°)
在△ECO中由三角定理可得
(5)
在△BCO中由正弦定理可得
式中:∠OCB=95°。
在△ACO中由余弦定理和正弦定理可得
(AC)2=R2+(r+h)2-2×R×
(r+h)×cos∠AOC
(6)
式中:∠AOC=95°+γ。
由式(5)、(6)可知:当β=α时,h≈1 700 km,即当用户高度大于约1 700 km时,场景2可能会出现。
3 对跖卫星问题解决方法
由上述分析可知:GLONASS对跖卫星可能会对用户接收机产生两种影响,尤其对场景1,几乎所有的在轨航天器均会满足208 km工作高度的临界条件,但接收机使用GLONASS卫星信号参与定位解算仍有其优势:一方面,GLONASS系统是覆盖全球的卫星导航系统,使用GLONASS卫星可增加定位卫星数,提高航天器全区域运行时接收机的可靠性;另一方面,GLONASS系统采用了FDMA,卫星信号分布在多个频点上,具备更好的抗干扰能力。因此,接收机可兼容GLONASS信号是必要的。
为有效解决GLONASS对跖卫星问题,根据对跖卫星特点和上述分析本文给出以下解决方案。设Sat1,Sat2为一对GLONASS对跖卫星;h为Sat1失锁时用户接收机的高度;E1为Sat1失锁时相对用户接收机的仰角;E2为Sat1失锁时Sat2相对用户接收机的仰角;T为从Sat1失锁到当前一次重捕结束经历的时间;dt为允许重捕Sat1的时间(对导航接收机,重捕获时间要求一般为小于5 s,dt可设置为5 s)[10]。da为Sat2仰角余量,以保证在dt时间内,Sat2相对接收机不会由不可见变为可见,有
(7)
GLONASS卫星速度小于第一宇宙速度7.9 km/s,若接收机最大速度为v,则da的门限值dath可近似表示为

(8)
当接收机对Sat1失锁时,进入处理流程(如图3所示)。
图3 对跖卫星问题处理流程Fig.3 Flowchart of treating problem caused by antipodal satellites
3.1工作高度小于208km
接收机工作高度小于208 km时,不会同时观测到对跖卫星,可不考虑对跖卫星影响。若接收机对Sat1失锁,则根据已有星历对Sat1进行快速重捕,若在dt时间内未能捕获Sat1,则清除其星历后再捕获Sat1(或Sat2)。
3.2工作高度大于208km且小于1700km
接收机工作高度大于208 km且小于1 700 km时,接收机可能观测到一对仰角小于5°的对跖卫星。该情况下,若Sat1失锁时仰角小于5°,因其不参与定位,则可直接清除其星历,待捕获成功后,重新收集星历;若Sat1失锁时仰角大于5°,则根据已有星历对失锁卫星进行快速重捕,在dt时间内未能捕获Sat1,就清除其星历后再捕获Sat1(或Sat2),这样可避免场景1的出现。
3.3工作高度大于1700km
接收机工作高度大于1 700 km时,接收机既可能观测到一对仰角小于5°的对跖卫星,也可能观测到一颗仰角大于等于5°、另一颗仰角小于5°的一对对跖卫星。
若Sat1失锁时仰角小于5°,因其不参与定位,则可直接清除其星历,待捕获成功后,重新收集星历。若Sat1失锁时仰角大于等于5°,则需计算Sat2的位置,根据其可见性采取不同的措施。Sat2位置的计算方法如下。
a)当接收机中有Sat2的可用历书时,用历书计算Sat2位置[2]。
b)当接收机中无Sat2的可用历书时,先用星历计算Sat1位置[2]。根据对跖卫星位于同一轨道且位置相隔180°的特性,若Sat1位置为(XS1,YS1,ZS1),则Sat2的位置(XS2,YS2,ZS2)=(-XS1,-YS1,-ZS1)。
获得Sat2位置后,判断此时Sat2相对接收机是否可见。如图4所示,用户接收机在点C,过地球中心O向接收机与Sat2连线AC作垂线,垂足为E。当Sat2和接收机视线方向被地球遮挡时,Sat2对接收机不可见,此时需满足
即
(9)
式中:(Xu,Yu,Zu),(XS2,YS2,ZS2)分别为Sat1失锁时的接收机和Sat2的位置;(X,Y,Z)为点E坐标,且
(10)
反之则可见。
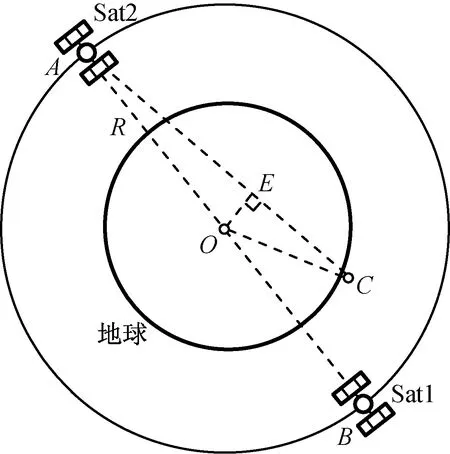
图4 Sat2相对接收机位置Fig.4 Relative position of Sat2 and receivers
若Sat2可见,则清除Sat1的星历,以保证接收机不受对跖卫星影响。若Sat2不可见,则通过已有星历对失锁卫星进行快速重捕,如在dt时间内未能捕获Sat1,就清除其星历后再捕获Sat1(或Sat2),这样可避免场景1、2的出现。
3.4高轨应用
随着接收机工作高度增大,为使可参与定位卫星更多,需取消仰角5°的门限限制。近年来,采用全球导航卫星系统(GNSS)技术的星载接收机成为研究热点,部分用于高轨道地球卫星,如地球静止轨道(GEO)卫星等,此时卫星所处的位置高于GNSS星座,不但可接收到GNSS主瓣信号,而且也可能接收到其旁瓣信号。因接收机处于高轨时仅靠单系统信号难以实现定位,故接收机兼容GLONASS信号是必要的,可改善高轨卫星上接收机对导航卫星的可见性[11]。
对上述高轨应用,接收机如能同时观测到一对GLONASS对跖卫星,其仰角均小于0°,此时应取消仰角门限的限制。以下对此进行讨论。
如图5所示,点C1、C2为GEO轨道用户接收机位置;Sat1,Sat2为一对GLONASS对跖卫星;直线L1、L2间的区域为Sat1、Sat2导航信号可到达的区域(本文认为天线方向角可达到180°范围)。当接收机对Sat1失锁时:
a)若接收机位于点C1,按3.3节方法得到Sat2位置。过地球中心O向接收机与Sat2连线AC1作垂线,垂足为E1。若满足
(11)
接收机可能收到Sat2的旁瓣信号,则Sat2对接收机可见。此时清除Sat1的星历,保证接收机不受对跖卫星影响。
b)若接收机位于点C2,按3.3节方法得到Sat2位置。过地球中心O向接收机与Sat2连线AC2作垂线,垂足为E2。此时接收机无法接收到Sat2的信号,故其对接收机不可见,满足
(12)
接收机可通过已有星历对失锁卫星进行快速重捕。
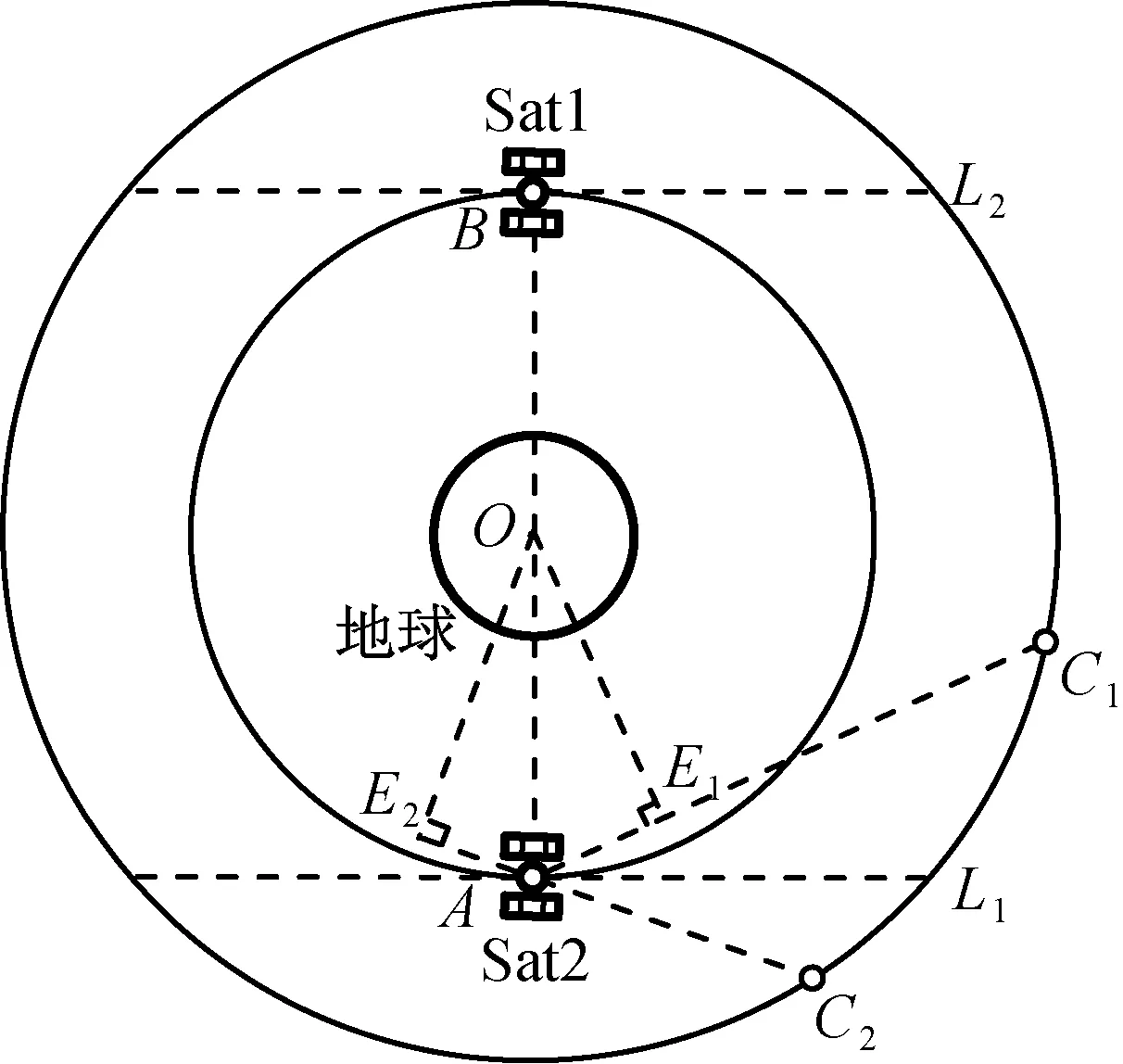
图5 GEO轨道时对跖卫星相对接收机位置Fig.5 Relative position of antipodal satellites and receivers on GEO
综上,在高轨应用场景中可通过判断垂足位置选择相应处理方案。
4 测试验证
以下使用卫星信号模拟器对相关场景进行了仿真,并对本文的对跖卫星问题解决方案进行测试验证。
4.1场景1测试结果
模拟器场景设置为:共有卫星2、3、13、17、20、24号6颗,仅20、24号仰角小于5°。其中20、24号是一组对跖卫星,20号仰角逐渐减小,第30 s时,被地球遮挡不可见;24号仰角逐渐增大,第160 s时,仰角大于5°可参与定位。
测试结果如图6所示:接收机一开始捕获跟踪到卫星20号,因仰角始终小于5°,故不参与定位,此时接收机仍可接收到4颗可参与定位的卫星,工作正常;第30 s时,接收机对卫星20号失锁,随后其24号对跖卫星被接收机捕获跟踪,且无法与20号区分,但因仰角均小于5°不影响定位结果;第160 s后,24号仰角大于5°,由于使用20号的星历,使接收机解算出的24号仰角误认为仍小于5°,无法参与定位;第370 s时,接收机对3号失锁,可参与定位的卫星数由4颗降为3颗,接收机无法定位,而原本若24号正常参与定位解算时接收机可正常工作。图6中:红色曲线表示参与定位卫星;绿色曲线表示可见但未参与定位卫星(已解出仰角);黄色曲线表示本可参与定位却未参与定位卫星。
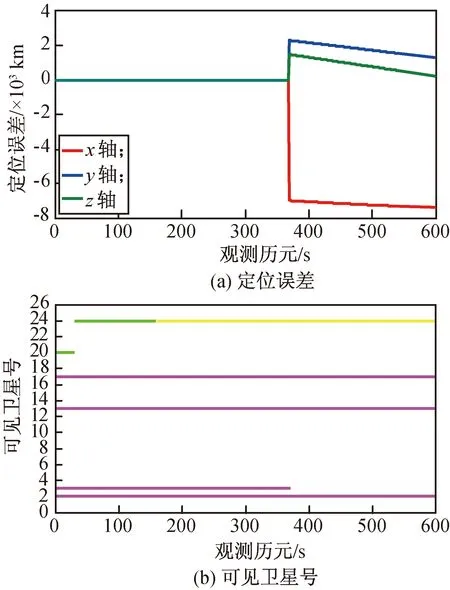
图6 对跖卫星影响接收机性能
当接收机使用本文的对跖卫星问题解决方案后,因卫星20号仰角小于5°,故当接收机对其失锁后,直接清除该星星历,则场景1不会出现。如图7所示:在第160 s后,24号重新收齐星历,可参与定位解算,接收机工作正常。图7中:红色曲线表示参与定位卫星;绿色曲线表示可见但未参与定位卫星(已解出仰角)。

图7 清除卫星星历消除对跖卫星的影响Fig.7 Clearing ephemeris eliminates effect caused by antipodal satellites
4.2场景2测试结果
模拟器场景设置为:共有卫星8、15、22、23、24、20号6颗,仅20号仰角小于5°,20、24号是一组对跖卫星,20号仰角逐渐减小,24号仰角逐渐增大。第57 s时,关闭24号。
测试结果如图8所示:第57 s时,接收机对24号失锁,随后20号被捕获跟踪。由于接收机无法区分20、24号,会误用24号的星历计算20号的位置,导致解出的20号仰角大于5°参与定位解算,从而使定位结果出错。图8中:红色曲线表示参与定位卫星,青色曲线表示不该参与定位的卫星误参与定位。
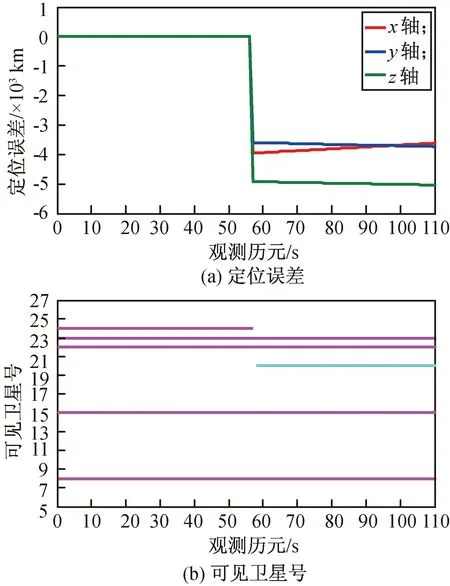
图8 对跖卫星导致定位出错Fig.8 Antipodal satellites lead to wrong positioning results
当接收机使用本文的对跖卫星问题解决方案后,若接收机对24号失锁,因其仰角大于5°,且根据模拟器场景设置20号可见,则接收机会清除24号的星历,以保证不会误用其星历计算20号的位置。如图9所示:第57 s时,接收机对卫星24号失锁,但随后20号不会误参与定位;第86 s时,当20号收齐星历并计算出其卫星位置后,解出了小于5°的仰角值,故不会对定位结果产生影响。图9中:红色曲线表示参与定位卫星;绿色曲线表示可见但未参与定位卫星(已解出仰角)。
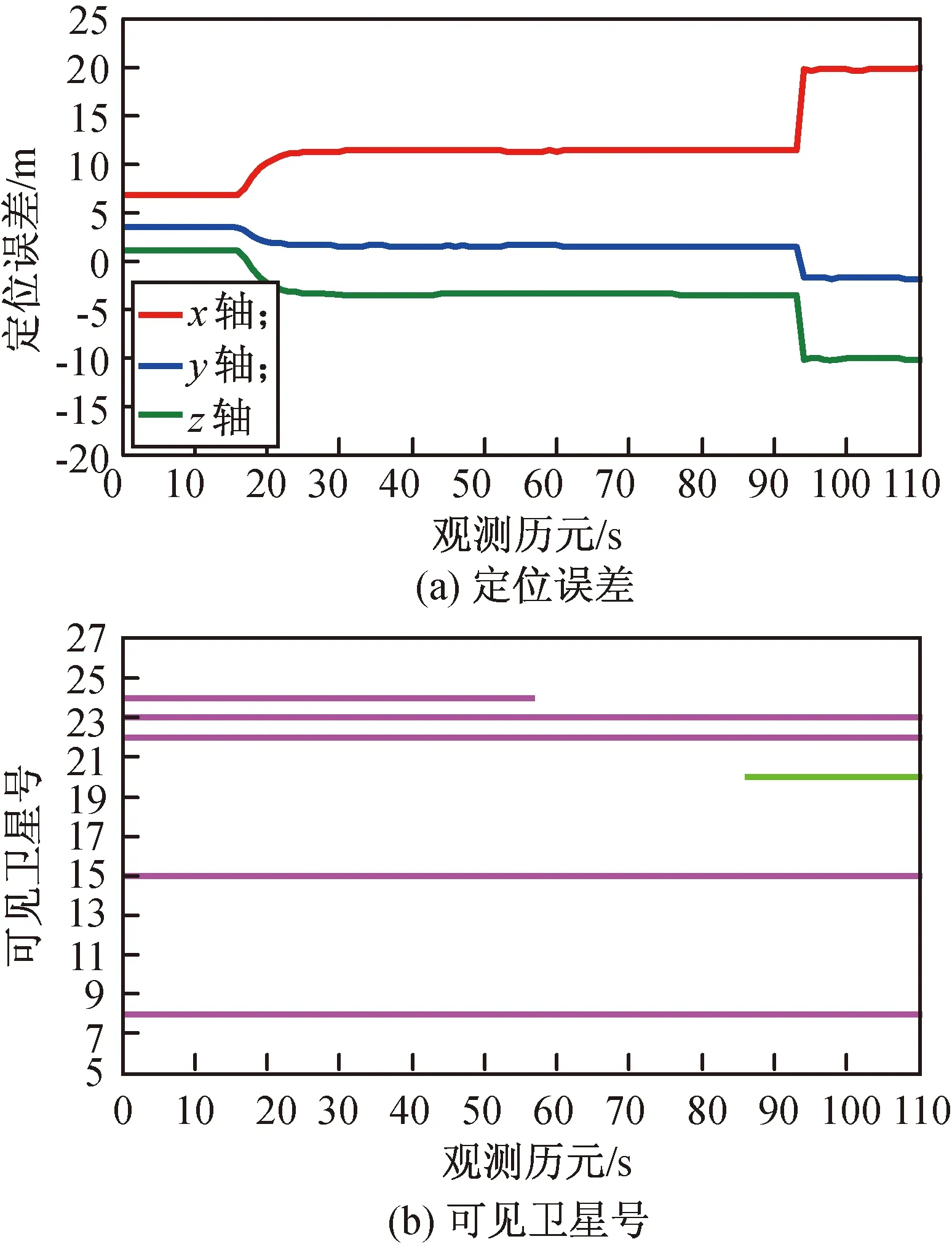
图9 清除卫星星历消除对跖卫星的影响
5 结束语
地面用户不会同时观测到GLONASS对跖卫星,但对航天用户接收机来说,可能会同时接收到GLONASS对跖卫星信号,使接收机解算出现错误。虽然是概率事件,但高可靠性的航天用户不能忽视其影响。本文分析了GLONASS对跖卫星对接收机定位功能影响的两种场景及其发生条件:当仰角门限为5°,工作高度大于约208 km时,同时接收到对跖卫星信号可能影响接收机性能,工作高度大于约1 700 km时,同时接收到对跖卫星信号可能导致接收机定位结果出错或影响接收机性能;当仰角门限不为5°,仍可按文中方法求出临界高度。部分空间应用中,为使可参与定位卫星更多,也会取消仰角门限的设置,这导致接收机更易受到GLONASS对跖卫星的影响。为消除对跖卫星影响,文中给出了对跖卫星问题解决方案,并通过测试验证了上述方法的有效性。对在垂直方向上速度为v的高速运动载体,其高度门限需预留v×dt的余量,以避免在dt时间内接收机工作高度跨越门限。本文的分析结果可为兼容GLONASS信号卫星导航接收机的开发、测试和使用提供参考,对高可靠性航天用户导航接收机的设计有一定的工程实用价值。
[1] 柴霖. GLONASS的最新进展及可用性分析[J]. 电讯技术, 2007, 47(4): 76-81.
[2] Russian Space Agency. Global Navigation Satellite System (GLONASS) interface control document (ICD)[M]. 5.1 ed. Moscow: Russian Space Agency, 2008.
[3] REVNIVYKH S., GLONASS system status and progress: IGNSS Symposium[C]// [S. l.]: 2009.
[4] LANGLEY R B. GLONASS: review and update[J]. GPS World, 1997, 8(7): 46-51.
[5] Russian Space Agency Information-Analytical Centre. GLONASS constellation status[EB/OL].[2012-07-03]. http://www.glonass-ianc.rsa.ru/.
[6] BRANETS V, MIKHAILOV M, STISHOV Y, et al. “Soyuz”-“Mir” orbital flight GPS/GLONASS experiment[C]// ION GPS-99. [S. l.]: [n. l.], 1999: 2303-2311.
[7] XU Guo-chang. GPS: theory, algorithms and applications[M]. 2 ed. New York: Springer, 2010.
[8] CAI C, GAO Y. Precise point positioning using combined GPS and GLONASS observation[J]. Positioning, 2007, 1(11): 13-22.
[9] 谢钢. 全球导航卫星系统原理—GPS, 格洛纳斯和伽利略系统[M]. 2版. 北京: 电子工业出版社, 2013: 164-166.
[10] 许丽丽, 吴海玲, 刘英乾, 等. 北斗/全球卫星导航系统(GNSS)导航单元性能要求及测试方法: BD420005-2015[S]. 北京: 中国卫星导航系统管理办公室, 2015.
[11] 詹鹏宇. 基于GNSS的高轨卫星定轨技术研究[D]. 南京: 南京航空航天大学, 2012.
AnalysisofGLONASSAntipodalSatellites’EffectonNavigationReceivers
LIUQing,YANGDong-xu,WUXiang,GUOKen-ping,DINGYa-ling
(Shanghai Aerospace Electronic Technology Institute, Shanghai201109, China)
To solve the problem that it was possible to affect the positioning of GLONASS receiver operating on relative high orbit because of receiving the signals of GLONASS antipodal satellites but not discriminating, the mechanisms of wrong positioning results or lower positioning performance for the receiver were analyzed, which was caused by the disconformity between the position and pseudorange after losing lock and recapture. It found that the effect of antipodal satellites should be considered when the receiver operated was higher than208km. The generating conditions of the effect of antipodal satellites were discussed. The two scenarios were given which were both two satellites’ elevations were smaller than5° and elevation of one satellite was not smaller than5° and elevation of the other was smaller than5°. The methods to eliminate the effect of antipodal satellites were presented for the receiver height from208km to1700km, higher than1700km and high orbit application. The effect of the two scenarios was simulated by satellite signal simulator and the proposed method was approved. The results showed that the solution proposed in this paper could effectively solve the receiver problems caused by antipodal satellites, which would provide reference for the development, testing and application of GNSS receivers compatible with GLONASS signal. Also it has some practical engineering value for the design of high-reliability space navigation receivers.
GLONASS; antipodal satellites; receivers; positioning; elevation; operation height; losing lock; recapture
1006-1630(2017)04-0150-08
2017-04-13;
:2017-07-07
刘 庆(1985—),男,硕士,主要研究方向为卫星导航接收机设计。
TN967.1
:ADOI:10.19328/j.cnki.1006-1630.2017.04.018
