GEO卫星GNSS导航在轨长期性能验证与分析
2017-09-14李冰,刘蕾,王猛
李 冰,刘 蕾,王 猛
(1.上海卫星工程研究所,上海 201109; 2.航天恒星科技有限公司,北京 100080)
GEO卫星GNSS导航在轨长期性能验证与分析
李 冰1,刘 蕾2,王 猛2
(1.上海卫星工程研究所,上海 201109; 2.航天恒星科技有限公司,北京 100080)
为对地球静止轨道(GEO)全球卫星导航系统(GNSS)自主导航性能进行验证,用通信技术试验卫星二号实际在轨工作数据,在我国首次对GNSS导航的长期在轨性能进行实测和试验,并对导航精度进行评估。介绍了GEO上GNSS导航原理和通信技术试验卫星二号的GNSS导航系统。设计了转移段(GNSS天线未展开)和定点后GNSS天线展开前后的导航性能试验。给出了转移段GPS/GLONASS的可用星数、GNSS的位速解算结果,以及定点后GNSS天线展开前后GNSS捕获的星数与可用星数、位置精度因子和位速精度,并说明了性能试验的有效性。结果表明:在转移段,在GNSS接收机在部分弧段可捕获到导航星4颗以上,位速解算结果正确,且位速一致性好,GNSS导航系统可用;定点后GEO上观测到的GNSS星数量满足自主导航使用要求,获得的位速精度符合仿真预期,GNSS天线展开后位置精度因子和位速精度明显优于展开前。连续48 h数据获得的实测位置精度优于30 m,速度精度优于0.05 m/s。本次在轨试验证明了GNSS用于GEO轨道卫星是可行的,为我国高轨卫星自主导航和在轨自主管理提供了重要支撑。
地球静止轨道; 全球卫星导航系统; 捕获星数; 可用星数; 位置精度因子; 位置精度; 速度精度; 天线展开
0 引言
GEO卫星的轨道高度约36 000 km,可覆盖地球超过三分之一的表面,该特点使GEO卫星目前广泛用于通信、导航和遥感等多个领域。早期GEO通信和遥感卫星主要关注的是轨道监控和天线定向等,百米级的定轨精度能满足卫星应用任务对轨道精度的要求。但随着GEO卫星在资源、导航定位与授时、跟踪与数据中继等领域的作用不断增强,对轨道自身的确定精度要求已越来越高,如通信卫星的位置精度要求200~400 m,遥感卫星200~400 m,欧洲导航卫星1 m,深空中继站(ODSRS)2 m,美国TDRSS中继卫星优于10 m[1-3]。
目前GEO卫星测定轨技术主要有地基测距测角和天基测距测速两大类。地基一般采用长基线测距定轨方案,由多站测距完成。地基测量中包括测角跟踪技术、甚长基线干涉测量技术(VLBI)、短基线连接元干涉技术(CEI)等。天基测距测速技术主要包括GEO-LEO的卫-卫跟踪和星载GNSS[3]。上述两类测定轨技术中,地基测量离不开地面测距站的支持,所受的制约因素较多,如测距精度、频率资源、星载测距设备、测距站布局等,其中对测距精度影响最大的是测距站的地理位置,即几何精度因子(DOP)[4]。受客观条件的制约,我国卫星能选择的测距站有限,很难获得非常好的几何精度因子。天基GEO-LEO也需依赖LEO卫星实施对GEO卫星的测定轨,同样受到LEO卫星使用的限制。针对GEO卫星使用地基和天基测量都面临制约因素多、造价高、外部依赖性大的问题,国际上提出了将LEO卫星上已成熟应用的GNSS导航技术(三轴位置精度(1σ)可优于10 m,三轴速度精度(1σ)可优于0.05 m/s)发展演变用于GEO卫星的解决方案。该方案可脱离地基、天基测量系统,通过GEO卫星自身携带的GNSS导航接收机接收导航信号即可完成在轨自主导航,具造价低、使用方便、精度高等优点,是目前国际上GEO卫星自主导航技术的主流。
LEO卫星因轨道高度在3 000 km及其以下范围,远低于MEO轨道导航星的轨道高度,因此LEO卫星通过对天面天线接收导航信号的条件好,可自主完成高精度测定轨,轨道高度1 340 km的Topex/Poseidon海洋卫星利用星载GPS接收机的径向位置能实现精度优于3 cm(RMS)[5]。GEO卫星的轨道高度高于MEO轨道导航星,只能通过对地面天线接收地球另一面的“漏”导航信号。因受地球遮挡,信号传输路径变长,GEO卫星接收导航信号的可见星数、布局条件、信号强度和多径效应等条件变差。针对GNSS用于GEO卫星自主测定轨的可行性,国内外均开展了大量研究和试验。
在GNSS导航用于GEO卫星研究中,主要通过保证GNSS天线有足够高的增益、提高GNSS接收机灵敏度,实现微弱GNSS信号快速捕获、跟踪保持,并以LEO轨道自主定轨算法为基础进行算法升级作为主要途径解决相关问题。国外对此已完成理论研究,并通过在轨试验证明了应用的可行性[6-11]。如德国的Equator-S科学卫星转移轨道200~36 000 km,最终轨道为500~67 000 km,卫星上载有LEO星载GPS接收机的改进型,通过在高轨段试验证明在GEO卫星上能跟踪到GPS卫星发播的导航信号,但也发现了GPS卫星的可见性差、接收到的信号微弱、信号捕获困难等问题;NASA发射的AMSAT-OSCAR-40(AO-40)卫星在1 000~58 800 km的大椭圆轨道上对GPS接收机用于HEO/GEO轨道卫星自主导航进行了探测性试验,结果表明在远地弧段实际接收的GPS信号的载噪比能达到40~47 dBHz(包括天线增益),多普勒频率约±10 kHz,50 h内可见导航星在0~5颗间变化。相比国外已完成工程验证,我国目前仍处在理论研究和数学仿真阶段,急需开展GNSS导航在GEO轨道的长时间飞行验证和测定轨性能分析。通信技术试验卫星二号在我国首次对GEO上GNSS导航的长期在轨工作和性能进行试验,本文依据该卫星的在轨工作数据分析了GNSS导航的性能,并评估了导航的精度。
1 GEO上GNSS导航原理
在LEO(3 000 km及其以下范围),GPS的可见星多,信号条件好。对中、高轨道航天器如GEO(35 786 km),由于高于GPS星座(20 200 km),只能接收地球另一面的“漏”GPS导航信号,即只有在GPS主天线下行频率主波束边缘构成的环形锥内才能接收到GPS信号。地球半径为6 378.14 km,由于地球遮挡GPS信号,从GEO卫星上只能“看到”8.7°~13.2°的范围,若考虑地球表面电离层则情况更差。GEO接收GPS信号原理如图1所示。其他导航系统与GPS类似,基本上是MEO卫星,在GEO也只能接收其“漏”导航信号。

图1 GEO上GNSS导航原理Fig.1 Principle of GNSS navigation in GEO satellite
低轨道卫星GNSS自主定轨方法中,最常用的是最小二乘估计和卡尔曼滤波方法。对高轨道GNSS自主定轨来说,因导航星几何分布差,单纯使用最小二乘估计方法的精度低,故可用基于轨道动力学模型的卡尔曼滤波方法,从而获得高精度的位置速度信息。扩展卡尔曼滤波是用于高轨道GNSS自主定轨最广泛的非线性滤波算法,主要原理是用轨道动力学模型预报轨道要素,再用实时数据中的伪距和多普勒观测值对轨道要素进行修正[12]。扩展卡尔曼滤波器状态量为
(1)
R=[xyz]

W=[wRwTwN]

此滤波器中以用户星J2000惯性系中三轴位置、速度,GNSS接收机的钟差、钟速,太阳光压系数,RTN方向三轴补偿加速度作为滤波器状态量,用轨道动力学模型进行外推预报,以伪距测量值对状态量的预报值进行滤波修正,通过坐标转换模块将滤波器状态量的滤波值转换成用户星J2000惯性系或WGS84系中的三轴位置、速度供用户或地面使用。GNSS自主定轨算法原理如图2所示。
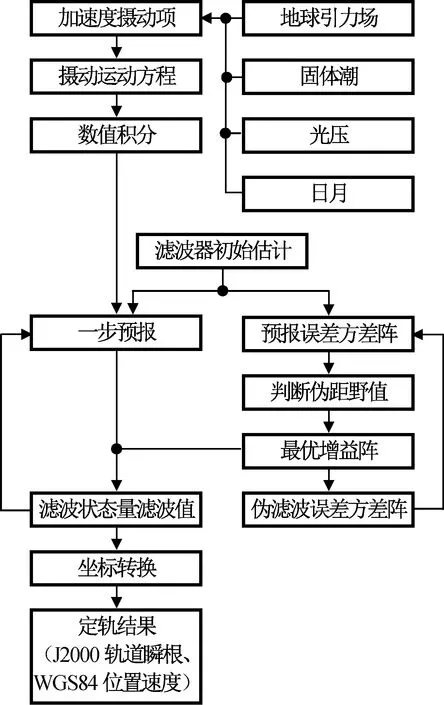
图2 GNSS自主定轨算法原理Fig.2 Principle of GNSS arithmetic
与用于LEO卫星的产品配套类似, GEO卫星的GNSS导航系统主要功能有:兼容接收和处理GPS等导航信号;具GPS等信号伪距测量能力;形成原始观测数据通过总线送星载计算机,下传地面用于精度分析;产生实时定位数据(UTC时间、三维位置、三维速度)通过总线送星载计算机,供姿轨控软件使用;提供精确时间基准。
2 通信技术试验卫星二号的GNSS导航系统
2.1使用方案
2017年1月5日,作为国内首颗正式应用高轨GNSS导航技术的GEO轨道卫星通信技术试验卫星二号成功发射,目前在轨运行稳定,工作正常。该卫星配置的高轨GNSS导航系统采用了典型的产品配套方案(如图3所示),能兼容接收和联合处理BD2/GPS/GLONASS三个导航系统的信号,实时完成三维位置、速度解算和输出,并将原始观测数据通过数传通道下传地面进行精密定轨处理。
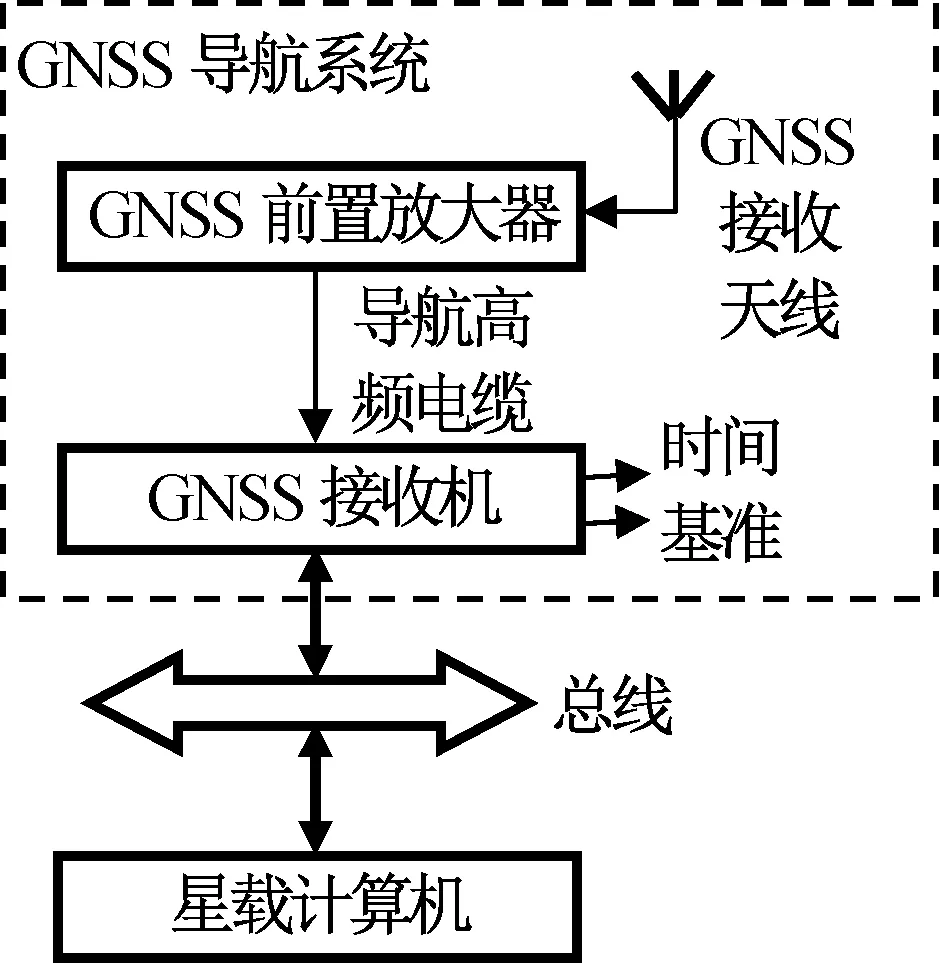
图3 GEO卫星典型GNSS导航系统Fig.3 Typical GNSS system for GEO satellite
该GNSS导航系统自卫星发射转移段即开机工作,截至目前在轨正常工作,向地面发送了大量在轨导航定轨结果和原始观测数据,可用于GNSS导航在GEO性能分析。
2.2使用约束
高轨GNSS导航在GEO上使用的约束主要源自轨道特性。因只能接收地球对面的“漏”导航信号,故采用多系统联合接收处理的方案可提高信号接收的概率,优化导航星座布局,并提高测定轨精度,GNSS接收天线应能同时接收BD2/GPS/GLONASS导航卫星星座的信号,频带宽度显著展宽。另外,GEO上GNSS接收到的信号非常微弱,为提高接收能力,天线在较大的波束范围内应具较高的增益。
通信技术试验卫星二号使用的GNSS天线在装星前对不同频点、不同角度的增益进行了实测,结果见表1。

表1 GNSS天线实测增益
由表1可知:天线3 dB波束宽度为±30°。在天线3 dB波束宽度视场角域内的遮挡可引起天线方向图严重变形,电性能下降较多,另外遮挡也将影响导航系统的位置精度因子(DOP),从而降低测定轨精度,最大可能导致定位精度产生较大误差机率提升至10%,故须注意GNSS天线在星上的布局[13]。欲获得理想效果,至少应保证在天线±30°波束范围内无星体遮挡。
为满足上述布局约束条件,通信技术试验卫星二号将高增益GNSS天线安装在1.3 m展开臂上,在卫星发射前展开臂与星体锁紧,在卫星定点后根据地面指令展开。展开臂与星体锁紧状态下,GNSS天线在星体一侧的波束视场被完全遮挡;展开臂展开状态下,可保证在GNSS天线±30°波束范围内无星体遮挡。
3 通信技术试验卫星二号GNSS导航性能分析
通信技术试验卫星二号GNSS天线展开前波束视场被星体遮挡,GNSS信号接收受到干扰。在卫星发射的转移段,为避免1.3 m展开臂展开后对卫星变轨飞行产生影响,在转移段GNSS接收机开机但展开臂为锁紧状态。在卫星定点后,为验证星体遮挡对GNSS导航性能的影响,制定了定点后前1个月仍保持展开臂为锁紧状态,此后通过指令解锁展开的方案,由此对比GNSS天线展开前后的导航性能。
3.1转移段
2017年1月5日,GNSS接收机于星箭分离后开机验证接收机在转移轨道的工作情况。GNSS接收机开机后,GNSS天线按计划未实施展开操作。
3.1.1 捕获星数
根据遥测下传的观测结果判断GNSS导航系统共跟随整星飞行了9~10圈,尽管GNSS天线处于未展开状态且姿态不确定,天线波束视场受星体遮挡较大,但GNSS接收机仍可捕获并使用GPS,GLONASS信号,可用星数分别如图4、5所示。其中:GPS星数集中在4~8颗,GLONASS星数集中在1~2颗。
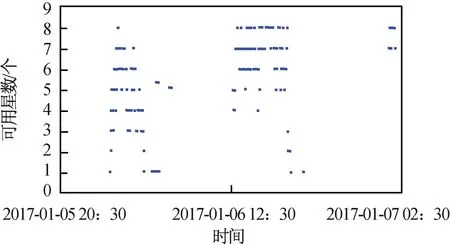
图4 转移段GPS可用星数Fig.4 Number of available satellites of GPS system on GTO
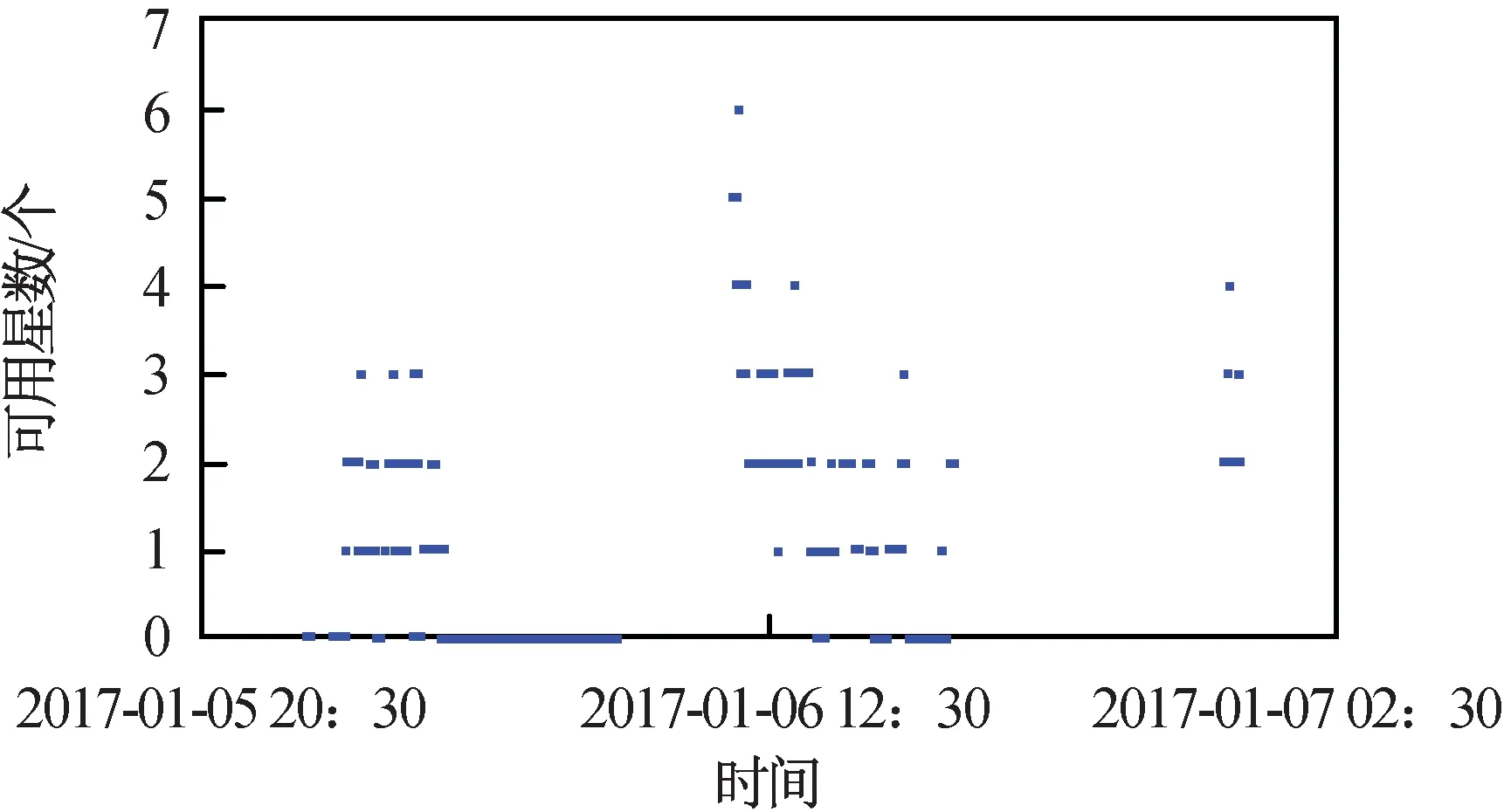
图5 转移段GLONASS可用星数Fig.5 Number of available satellites of GLONASS system on GTO
3.1.2 位置解算
根据GNSS伪距测量定位原理,用户星与导航星间以距离为基本观测量,根据时间测距进行导航定位。假设第j颗导航星于时刻tsj发播导航信号,该信号于时刻tr被用户接收机接收,则用户与第j颗导航星之间的距离ρj满足关系
ρj=c(tr-tsj)=[(Xj-X)2+(Yj-Y)2+
(Zj-Z)2]1/2+cΔt
(2)
式中:(Xj,Yj,Zj)为导航星j在时刻tsj地心坐标系中的坐标;(X,Y,Z)为用户接收机在地心坐标系中的坐标;Δt为钟差。导航星j的坐标可由导航天文求得,故(Xj,Yj,Zj)为已知量。另外,用户接收机时钟与导航星时钟、各导航星时钟间不可能完全同步,会引入误差Δt=ΔtR-Δtj-ΔtS。此处:Δtj为导航星j钟面时钟距离准确时刻的偏差,可由地面监控系统测定,并通过卫星发播的导航电文提供给用户,故Δtj可视为已知量;ΔtR为用户接收机钟面时钟距离准确时刻的偏差,一般用户很难测定,为未知量;ΔtS为在用户接收机同时接收到不同导航星座的信号时需考虑的,是不同导航星座钟面时钟的偏差,一般也难以测定,亦为未知量。由此,式(2)中最多包含未知量5个(如只接收单个导航星座的信号,则只有未知量4个)。用户接收机需至少同时对5颗或4颗卫星进行观测,测得5个或4个伪距观测值ρj(j=1,2,3,4,5),组成5个或4个观测方程联立求解,即可测定用户接收机坐标(X,Y,Z)。
另卫星在变轨飞行过程中轨道高度满足关系
Rj= [(Xj-X0)2+(Yj-Y0)2+
(Zj-Z0)2]1/2-Re
(3)
式中:(Xj,Yj,Zj)为GNSS接收机实时输出的WGS84坐标系中坐标;(X0,Y0,Z0)为WGS84坐标系原点(即地球质心)坐标,本文取值为(0,0,0);Re为地球半径。
因受星体遮挡及卫星姿态影响,GNSS接收机仅在部分弧段捕获到4颗以上的导航星,故GNSS导航系统只能在这些弧段中完成导航解算。GNSS接收机使用GPS,GLONASS信号实施联合定位定轨,实时输出卫星坐标(X,Y,Z),通过遥测下传。地面根据式(3)描绘的卫星在变轨飞行过程中轨道高度变化与地面测控系统实际测得的卫星真实情况一致(以第1~2圈为例,如图6、7所示),说明GNSS接收机位置解算结果正确、数据可用。
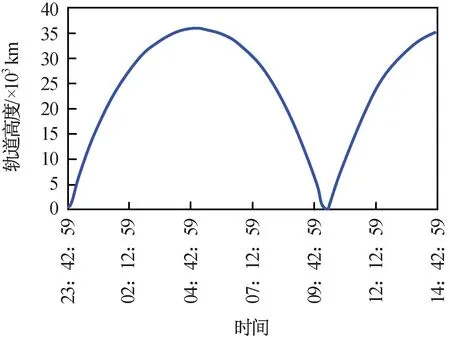
图6 地面测控系统实际测得飞行第1~2圈轨道高度Fig.6 Orbit altitude during 1~2 circle depends on practical measure
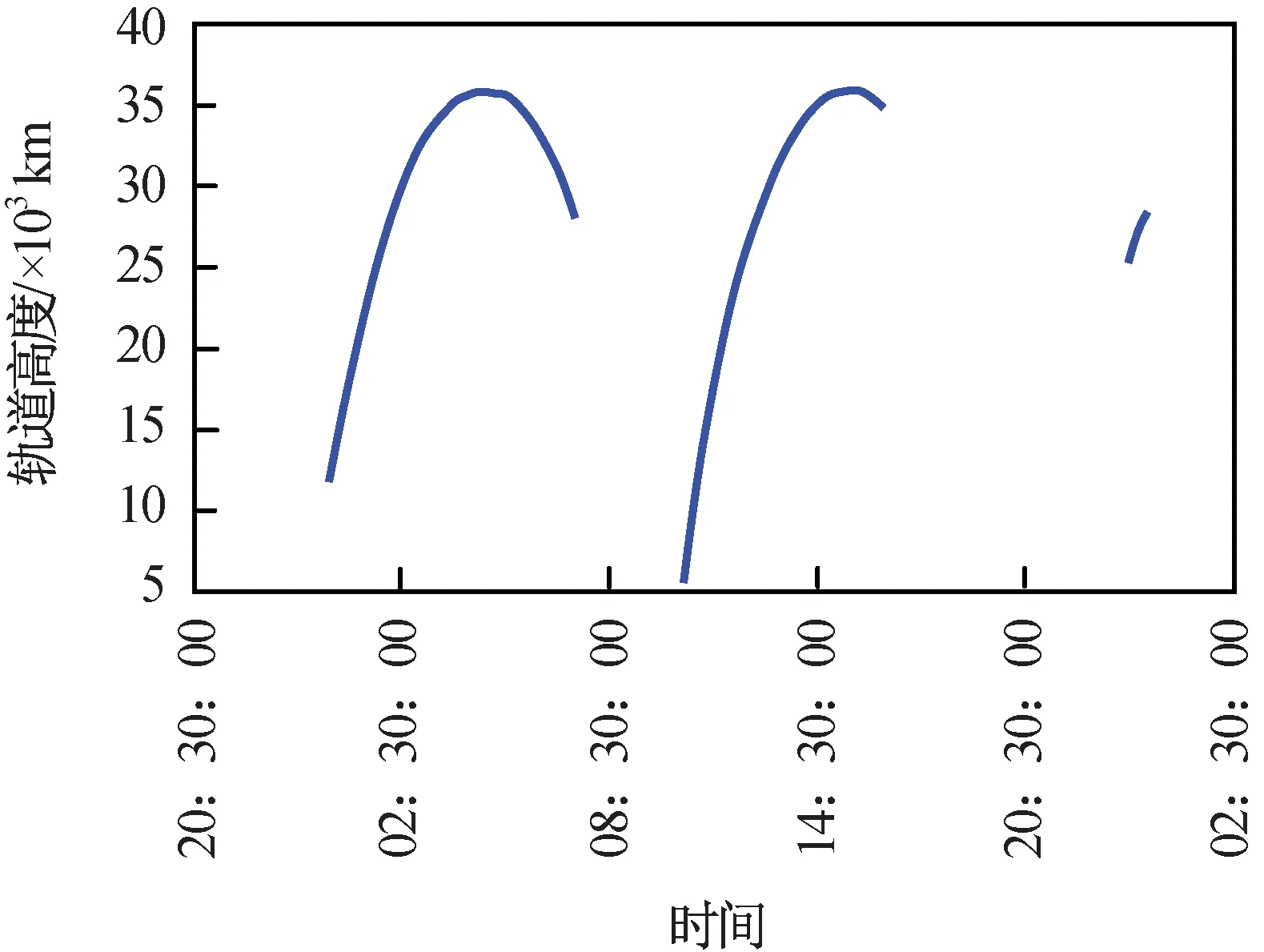
图7 根据GNSS系统输出描绘飞行第1~2圈轨道高度Fig.7 Orbit altitude during 1~2 circle depends on GNSS navigation
3.1.3 速度解算
对转移段中较关注的卫星速度,在仅从遥测通道获取GNSS接收机观测结果的有限条件下,用GNSS接收机定位定轨所得的相邻时刻位置偏移量与该时刻实测速度值进行对比,验证位置速度的一致性,有
(4)

位置速度比对结果如图8所示。由图8可知:偏移量与实测速度的差值均小于0.04 m/s,说明位置速度的一致性较好,GNSS接收机速度解算结果正确、数据可用。
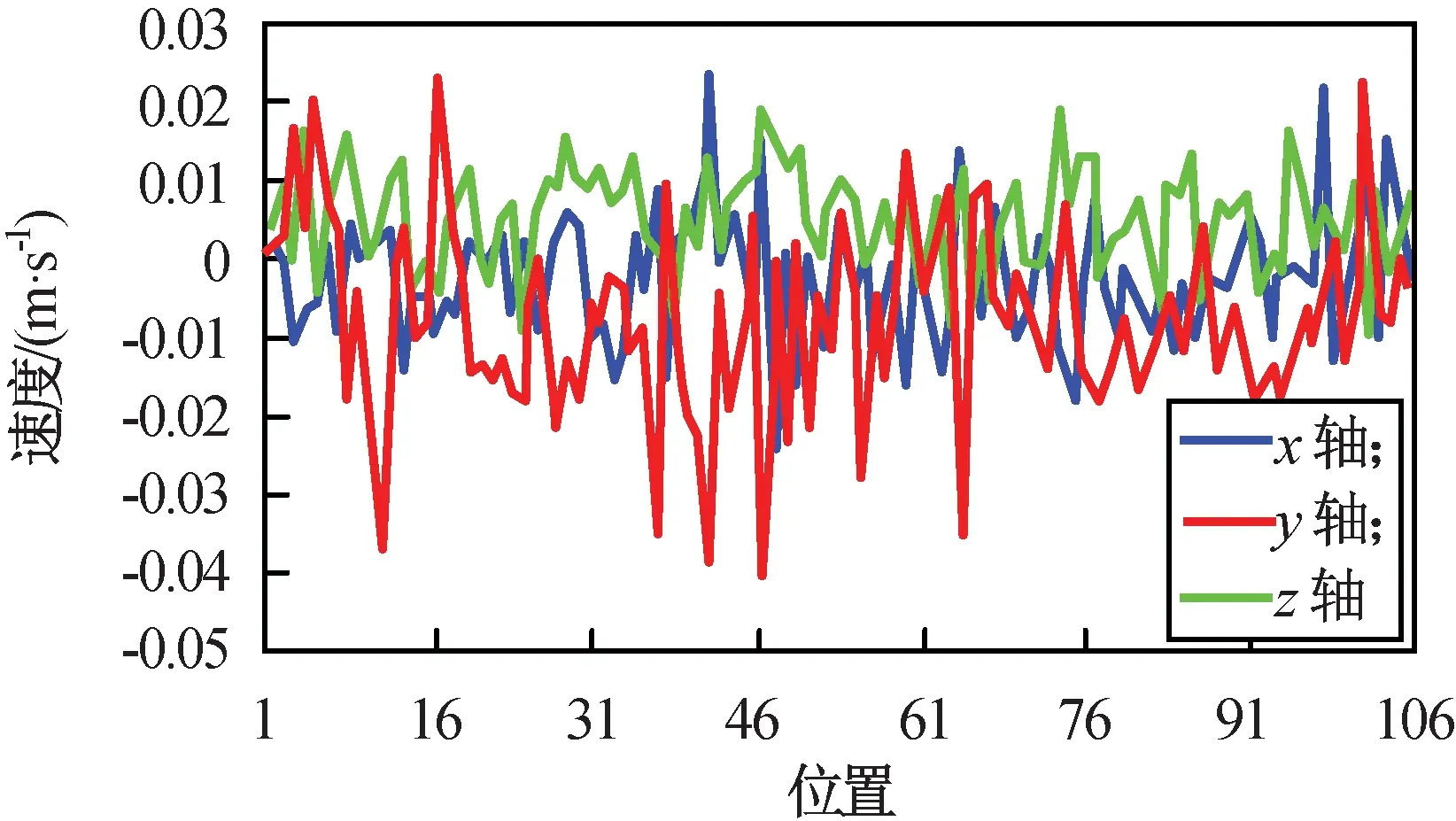
图8 位置速度一致性比对Fig.8 Consistency of position and speed of GNSS navigation
综合以上分析,在卫星转移段飞行过程中,GNSS天线未展开状态下GNSS接收机在部分弧段可捕获到4颗以上的导航星,从而实现位置、速度解算,解算结果均正确,且位置速度一致性较好,表明GNSS导航系统可用。
3.2定点后
卫星定点1个月后,GNSS天线按计划展开。根据天线展开前后数据,考虑捕获星数/可用星数、位置精度因子和位速精度等因素,对天线展开前后GNSS导航系统的在轨性能进行分析。
3.2.1 捕获星数/可用星数
天线展开前后各取连续48 h数据,对GPS,GLONASS,BD2的捕获星数、可用星数同时进行分析,结果如图9~14所示,统计见表2。由结果可知:在GEO可接收到三个导航系统的信号,可用星数总数大于4,满足自主定轨要求。BD2系统受导航星布局制约,故捕获和可用的星数均较少。
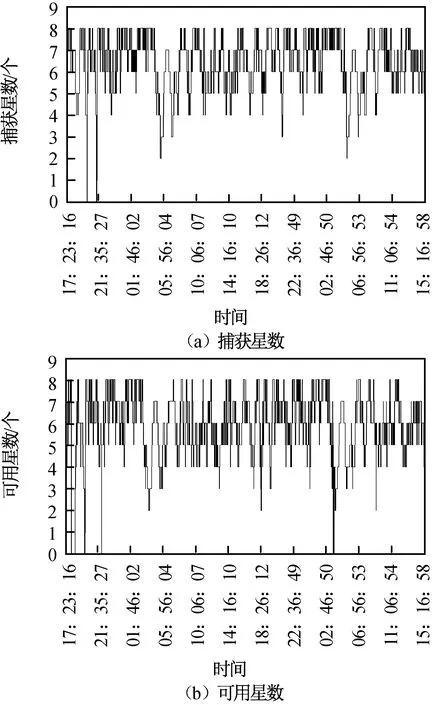
图9 天线展开前GPS系统捕获和可用星数Fig.9 Number of captured and available stars of GPS system before antenna outspread
由上述比较可知:天线展开前后天线波束视场范围不同,在展开后无遮挡条件下,GNSS导航系统的捕获星数和可用星数均明显优于展开前有遮挡,且捕获星数和可用星数均趋于稳定,不再频繁变化,这种改善在对GPS信号的接收中表现最明显,但在对BD2信号的接收中表现不明显,这主要是因为目前BD2星数少,且布局上暂时只能满足我国区域导航定位需求,GNSS接收机捕获和可用的“漏”BD2信号少。

表2 三个导航系统的捕获/可用星数
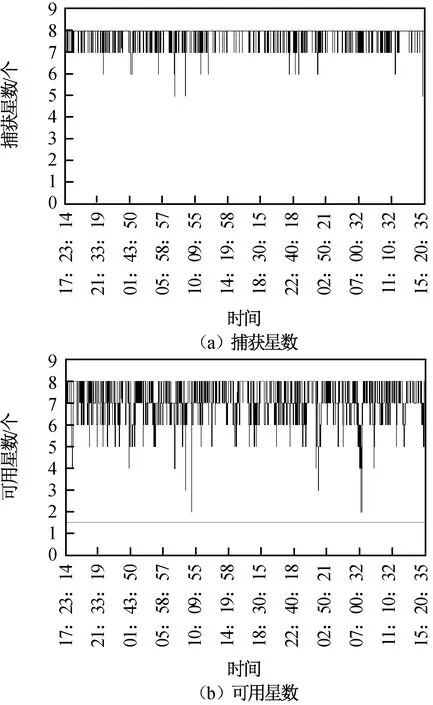
图10 天线展开后GPS系统捕获和可用星数Fig.10 Number of captured and available stars of GPS system after antenna outspread
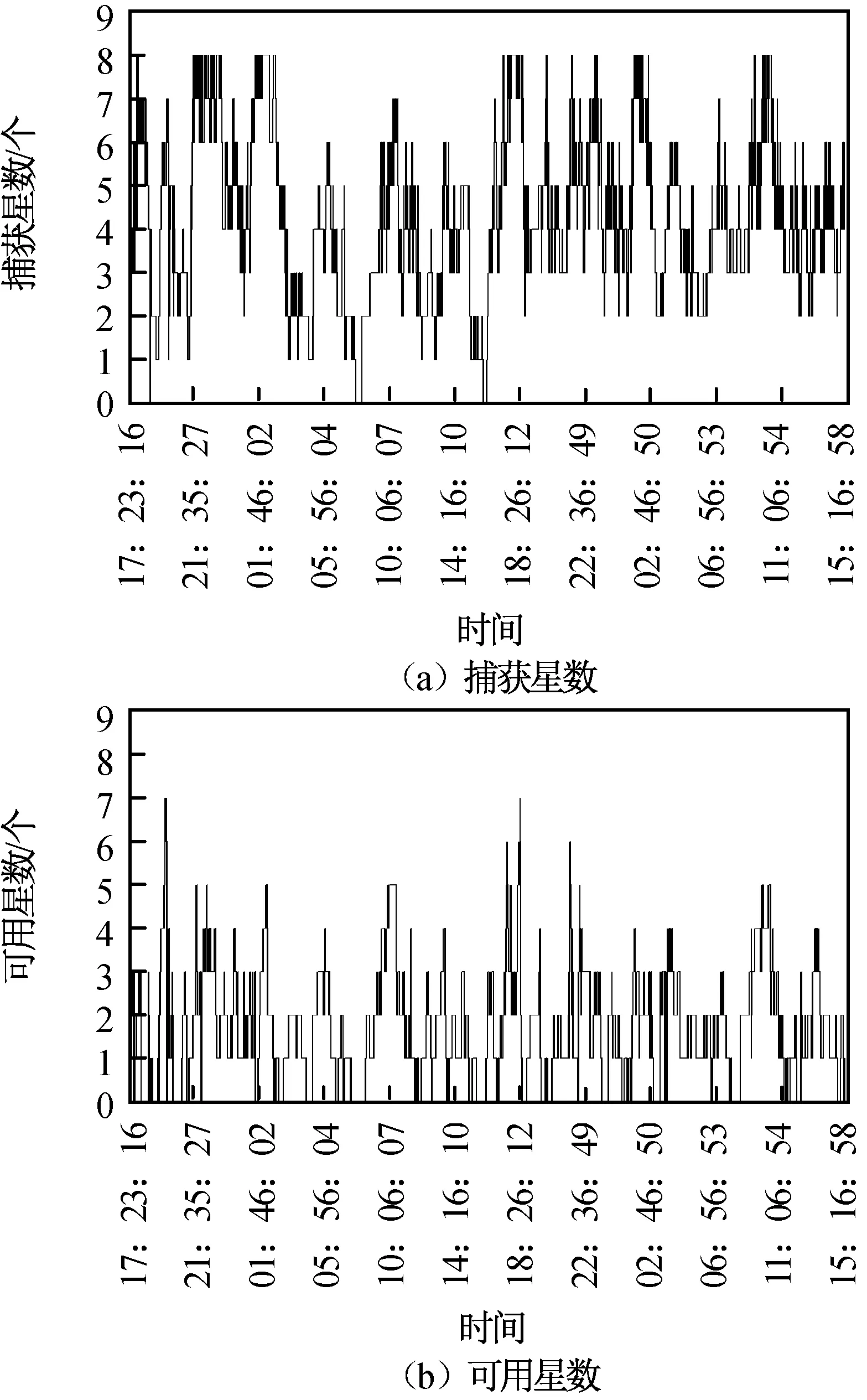
图11 天线展开前GLONASS系统捕获和可用星数Fig.11 Number of captured and available stars of GLONASS system before antenna outspread
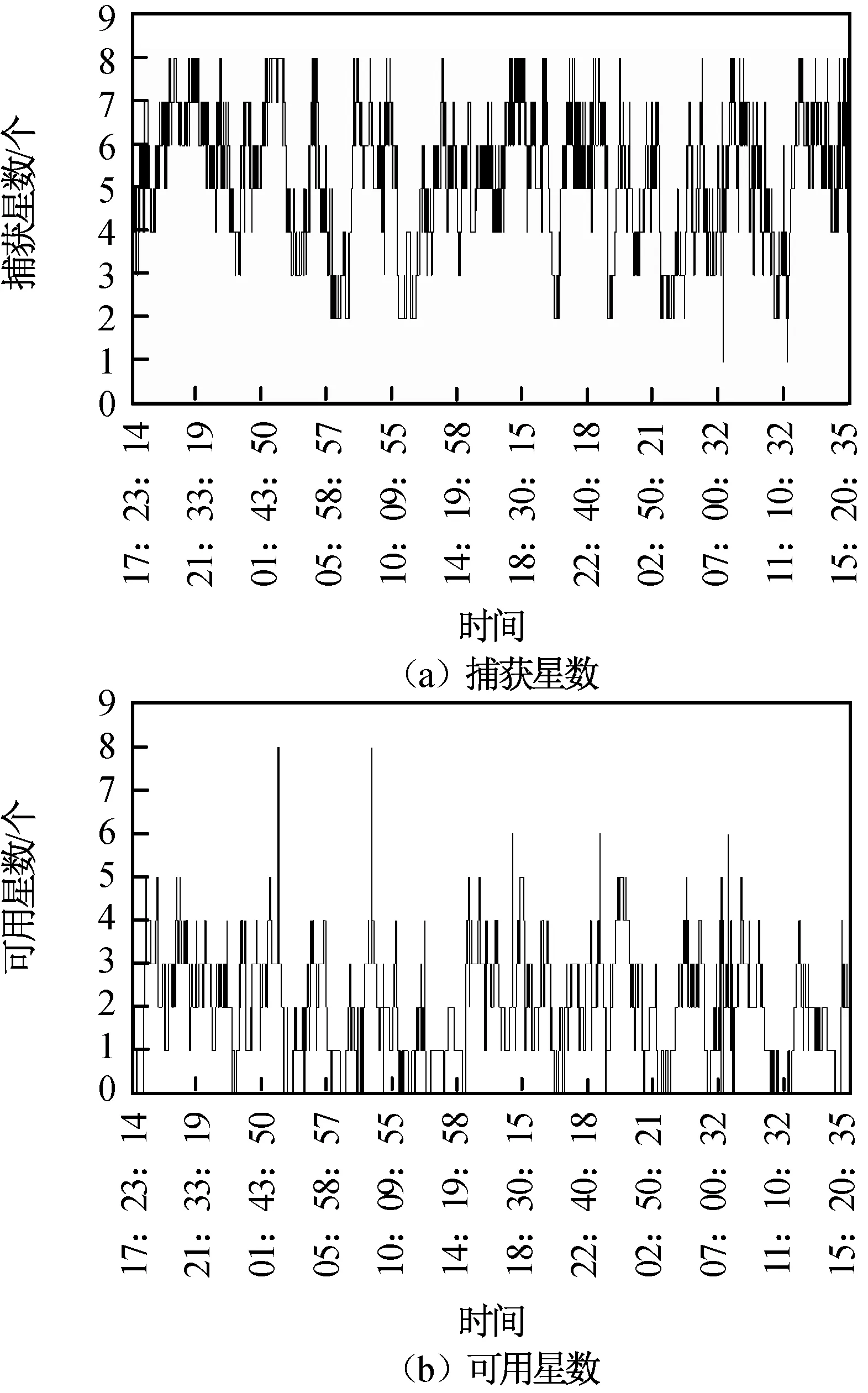
图12 天线展开后GLONASS系统捕获和可用星数Fig.12 Number of captured and available stars of GLONASS system after antenna outspread
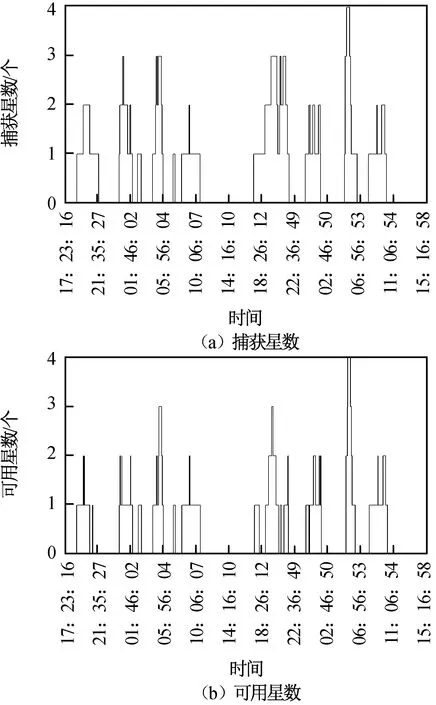
图13 天线展开前BD2系统捕获和可用星数Fig.13 Number of captured and available stars of BD2 system before antenna outspread
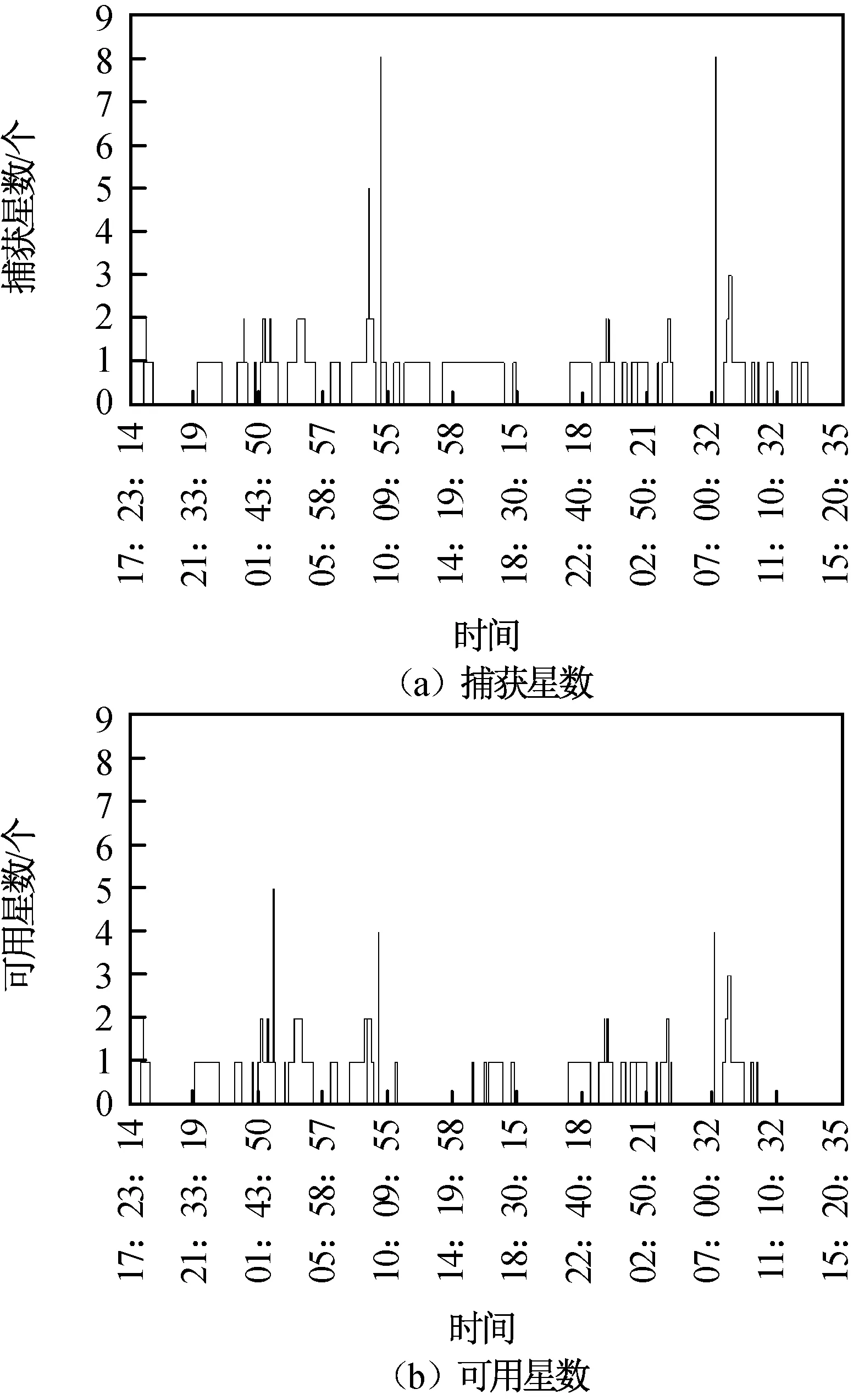
图14 天线展开后BD2系统捕获和可用星数Fig.14 Number of captured and available stars of BD2 system after antenna outspread
3.2.2 位置精度因子
导航系统的可用性是系统在某一指定覆盖区域内提供可使用的导航服务能力的标志,本文将其等效为满足某一门限要求的GNSS位置精度[14]。该精度可表示为
σp=λDOP·σUERE
(5)
式中:σp,σUERE分别为定位精度和卫星伪距测量误差的标准偏差;λDOP为位置精度因子,表征导航星几何布局。因此,提供给定精度级别的GNSS导航功能的可用性取决于对某个特定观测位置和时间来说的导航星几何布局。由式(5)可知:位置精度因子数值越小,定位结果越优。通过对GNSS接收机位置精度因子的仿真分析,GEO轨道上一般λDOP为10左右时表示导航星几何布局较好,λDOP为40左右时则较差。
天线展开前后各选取连续48 h数据,对GNSS位置精度因子进行分析,结果如图15、16所示。由图15、16可知:GNSS天线展开前λDOP大部分时间小于60,但个别时段大于100,表明星座布局较差,且个别时段无法满足使用要求;展开后λDOP优于展开前,其值全部小于60,且多在20以内,集中在10~15间,表明导航系统星座布局较好,满足使用要求。
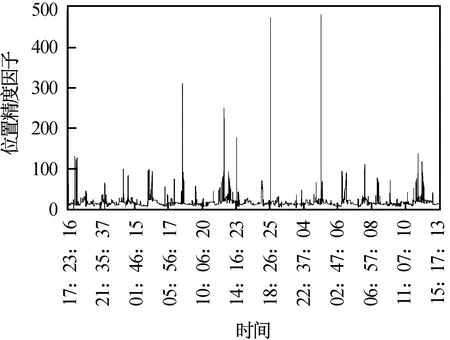
图15 展开前位置精度因子Fig.15 Statistics of DOP before antenna outspread
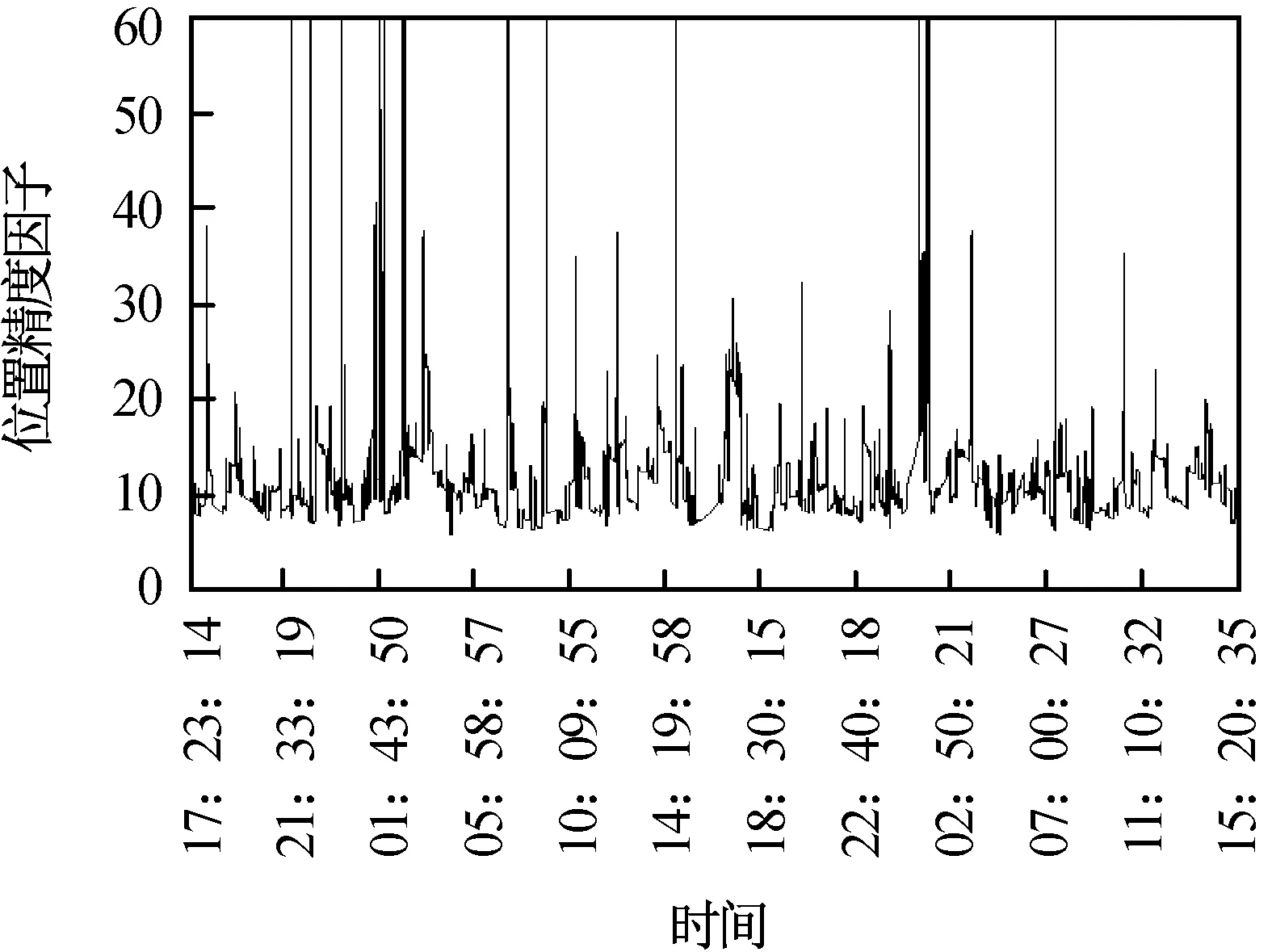
图16 展开后位置精度因子Fig.16 Statistics of DOP after antenna outspread
3.2.3 位速精度
卫星下传的GNSS原始观测数据包中记录了GNSS的伪距、载波相位、信噪比等原始观测量,可用于事后分析及精密定轨。利用导航星的精密星历与GNSS下传的原始观测量信息,在地面用动力学公式进行事后精密定轨,可作为卫星位速的真值,以评估GNSS在轨性能。
天线展开前后各选取连续48 h数据进行分析,展开前后事后精密定轨与GNSS位差和速差分别如图17~20所示,GNSS导航位置和速度精度见表3。结果表明:天线展开前后在GEO轨道GNSS导航均可获得较高的位置和速度精度;天线展开后由于天线波束视场变大,捕获和可用的星数、载噪比、位速精度均有所改善,由此位速精度也得到一定程度的提高。
由分析可知:在高轨上通信技术试验卫星二号GNSS导航实际获得的位速精度符合仿真预期,可满足GEO轨道通信和遥感卫星对位置精度的要求。
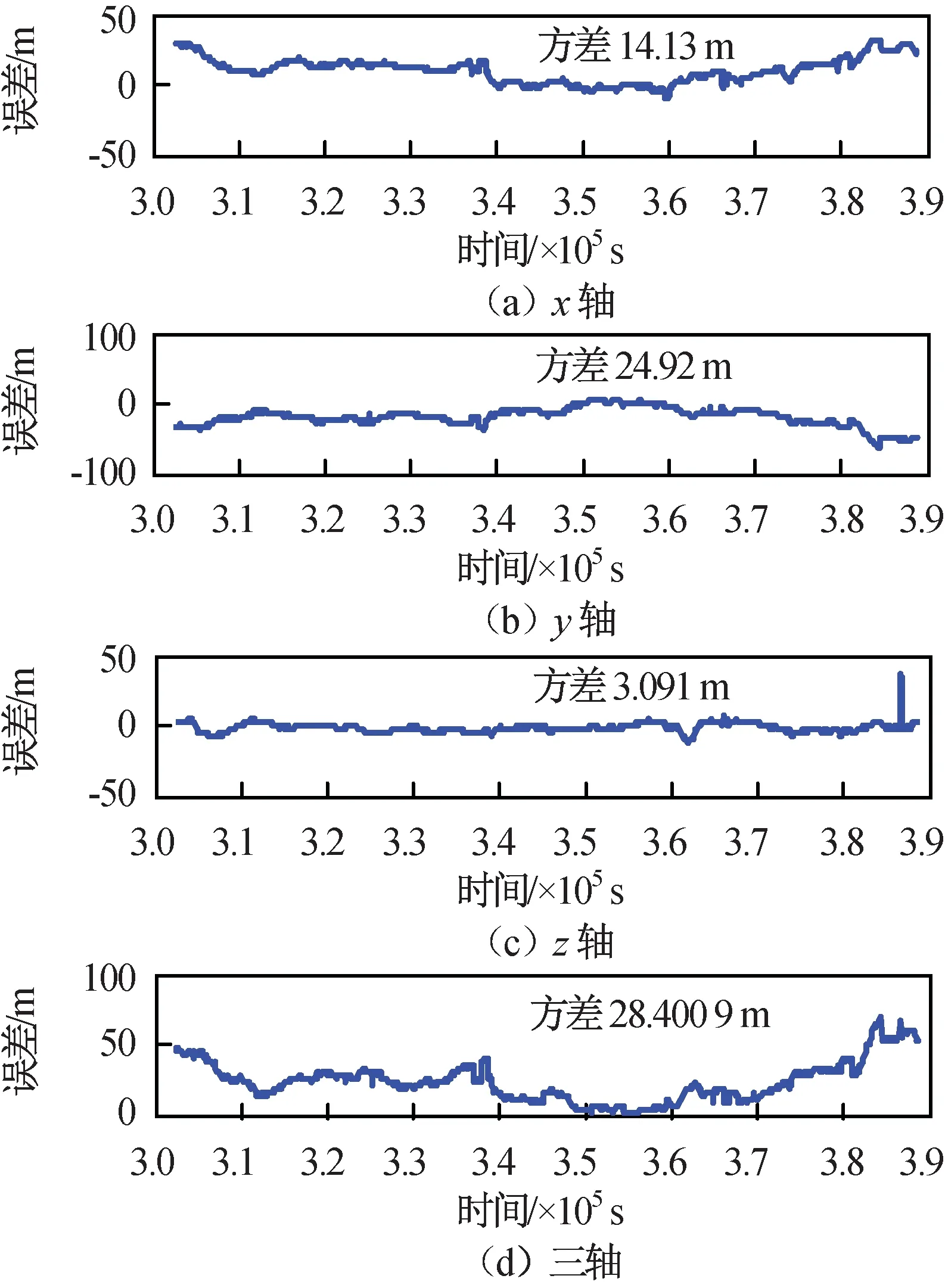
图17 展开前事后精密定轨与GNSS位差Fig.17 Position precise of GNSS navigation before antenna outspread
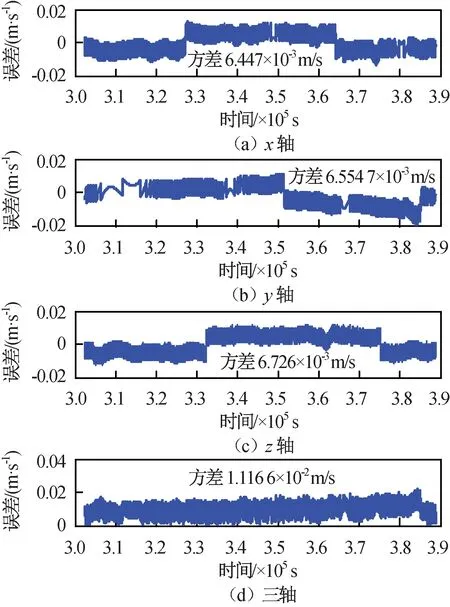
图18 展开前事后精密定轨与GNSS速差Fig.18 Speed precise of GNSS navigation before antenna outspread
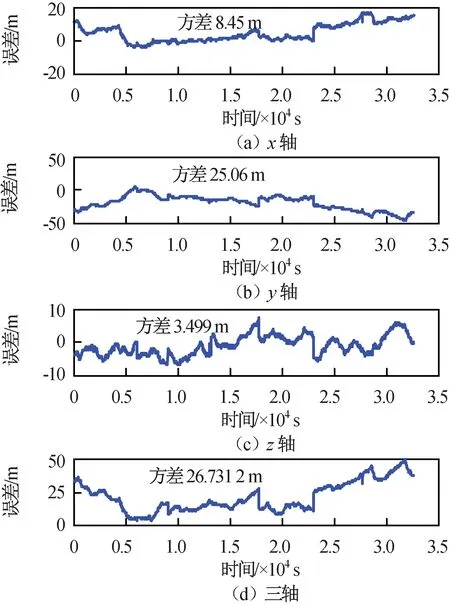
图19 展开后事后精密定轨与GNSS位差Fig.19 Position precise of GNSS navigation after antenna outspread
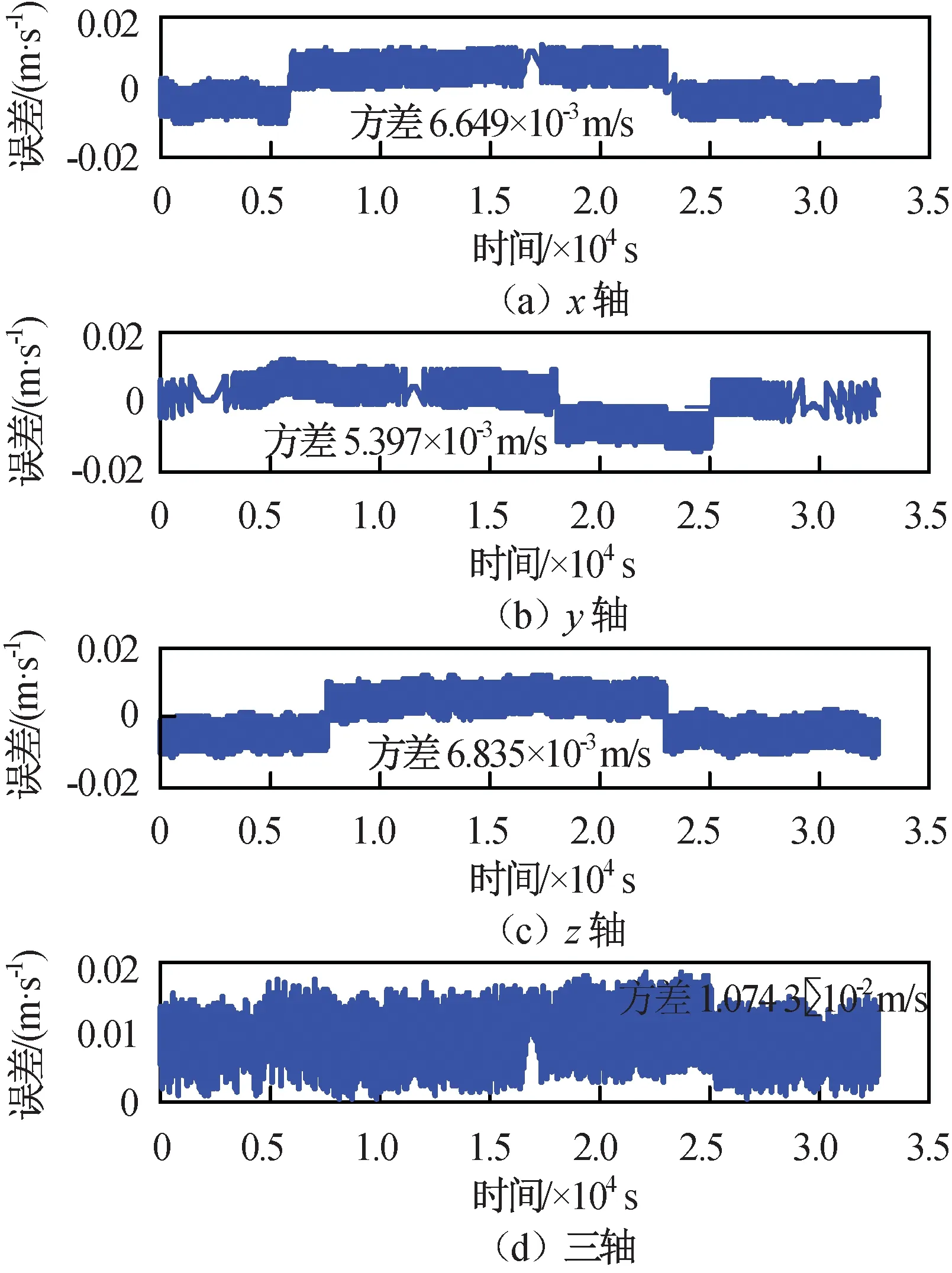
图20 展开后事后精密定轨与GNSS速差Fig.20 Speed precise GNSS navigation after antenna outspread
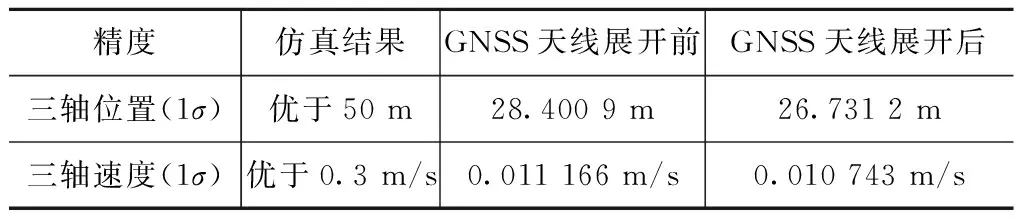
精度仿真结果GNSS天线展开前GNSS天线展开后三轴位置(1σ)优于50m28.4009m26.7312m三轴速度(1σ)优于0.3m/s0.011166m/s0.010743m/s
3.2.4 性能分析有效性
通信技术试验卫星二号为GEO轨道卫星,轨位固定,且导航星运行周期约12 h,因此本文选取连续48 h数据可反映GNSS在轨的真实性能,具有一定的代表性,性能分析有效。
另外,GPS卫星星座由安排在6个轨道面上的24颗卫星组成,具备向全球范围内用户提供导航服务的能力;GLONASS卫星系统与GPS类似;对BD2卫星系统,在布局完成GEO+MEO+IGSO的定位体系后,也具备GPS卫星系统相同的全球导航服务能力。因此,GEO轨道卫星在与通信技术试验卫星二号不同的其他定点位置处,其接收导航信号的条件与通信技术试验卫星二号一致,本文分析的性能依然适用。
4 结束语
通信技术试验卫星二号在我国首次开展了GNSS导航在GEO轨道的长时间在轨工作和性能实验,本文以连续48 h数据为基础进行测定轨性能评估。结果表明:在卫星转移轨道10余圈飞行中,GNSS接收机在部分轨道区间可提供有效导航数据,卫星定点后天线完全展开后GNSS接收机收星情况明显优于展开前。根据接收机实时定轨结果与事后高精度定轨数据比对结果分析,实测位置精度优于30 m,速度精度优于0.05 m/s,满足GEO轨道通信和遥感卫星对位置精度的要求。后续可基于通信技术试验卫星二号对GEO上GNSS导航系统性能的进一步改善进行研究和试验。
高轨GNSS导航系统在GEO上的应用具有重大意义,不仅为我国GEO卫星提供了一种新的测控手段,有效改善GEO卫星的测控精度,而且提高了我国GEO卫星自主管理水平,可为GEO卫星的轨位设计、轨道机动、多星组网等领域提供了有力的技术支撑,丰富了各任务领域GEO卫星的测定轨手段,为卫星在轨自主运行业务提供了更大的可能。
[1] HAINES B, LICHTEN S, SRINIVASAN J, et al. A demonstration of unified TDRS/GPS tracking and orbit determination[C]∥ Flight Mechanics/Estimation Theory Symposium 1995. [S. l.]: [n. l.], 1995: 309-320.
[2] YUNCK T P, WU S C. Ultra-Precise orbit determination by GPS[R]. AAS Paper 83-315, 1983.
[3] 杜兰. GEO卫星精密定轨技术研究[D]. 郑州: 信息工程大学, 2005.
[4] 兰茂田. 三点测距副站技术[J]. 中国空间科学技术, 1998, 18(3): 47-50.
[5] VISSER P, AMBROSIUS B. Orbit determination of TOPEX/POSEIDON and TDRSS satellites using TDRSS and BRTS tracking[J]. Adv Space Res, 1997, 19(11): 1641-1644.
[6] PASCALE F, LUC I, DUR J, et al.. GPS techniques for navigation of geostationary satellites[R]. ION GPS-94, 1994.
[7] KRONMAN J, MCELROY T. Consideration for the application of GPS is satellites: GPS system trade study[R]. ION GPS-95, 1995.
[8] BRUCE H, STEPHEN L. A novel use of GPS for determining the orbit of a geosynchronous satellite: the TDRS/GPS tracking demonstration[R]. ION GPS 94, 1994.
[9] STEPHAN T, CHRISTIAN A, SVEN M. Autonomous Onboard orbit and attitude control of geostationary satellites using GPS-pseudolites: 49th International Astonautical Congress[C]∥ [S. l.]: 1998.
[10] LEMKE N, EISSFELLER B, BALBACH O, et al. Tracking of GPS satellites in orbits above the GPS altitude: the GPS experiment on Equator-S: 49th International Astronautical Congress[C]∥ [S. l.]: 1998.
[11] COULSON P. The GPS at GTO experiment: 48th International Astronautical Congress[C]∥ [S. l.]: 1997.
[12] 詹鹏宇, 范胜林, 熊智, 等. 基于UKF的星载GNSS地球静止卫星定轨算法[J]. 现代电子技术, 2012, 35(8): 100-103.
[13] 陈琳, 朱忠, 李强, 等. 基于STK的测量船GPS天线遮挡模型仿真与分析[J]. 科学技术与工程, 2013, 13(21): 6265-6269.
[14] KAPLAN E D. GPS导航原理与应用[M]. 北京: 电子工业出版社, 2010: 248.
PerformanceDemonstrationandAnalysisofGNSSNavigationinGEOSatellites
LIBing1,LIULei2,WANGMeng2
(1. Shanghai Institute of Satellite Engineering, Shanghai201109, China;2. Space Star Technology Company Limited, Beijing100080, China)
To approve the self-navigation performance of global navigation satellite system (GNSS) on geosynchronous orbit (GEO), the measurement and test of GNSS performance on GEO were carried out based on the real data onboard of Telecommunication Test Satellite II in China, and the navigation precision was evaluated. The principle of GNSS on GEO and GNSS of Telecommunication Test Satellite II were introduced. The navigation performance experiments on geosynchronous transfer orbit (GTO) and GNSS antenna before and after outspread after positioning were designed. The numbers of available GPS and GLONASS satellites, arithmetic position and speed on GTO were given. And so were the numbers of captured and available navigation satellites, position dilution of precision (PDOP) and precise of position and speed before and after the antenna outspread after positioning. The effectiveness of the performance experiment was explained. The results show that the captured navigation satellites are more than4in some arcs by GNSS receiver on GTO, and arithmetic position and speed are correct with the good consistency of position and speed, which means the GNSS can be used. The numbers of GNSS satellites observed on GEO meet the requirement for self-navigation after positioning. The precise of position and speed obtained is agreed with the simulation result. The PDOP and precise of position and speed after the antenna outspread are better than those before the antenna outspread. The precise of position is better than30m and the precise of speed is better than0.05m/s. The result of this onboard experiment proves that the application of GNSS navigation in geostationary satellite is feasible, which provides a very important support to geostationary satellite tracking and orbit determination and self-management on the orbit for China.
geosynchronous orbit (GEO); global navigation satellite system (GNSS); captured satellite number; available satellite number; position dilution of precision (PDOP); position precise; speed precise; antenna outspread
1006-1630(2017)04-0133-11
2017-06-21;
:2017-07-15
国家自然科学基金资助(61601036)
李 冰(1983—),男,硕士,主要从事卫星总体与电子信息系统设计研究。
TN967.2
:ADOI:10.19328/j.cnki.1006-1630.2017.04.016
