基于双总线的FY-4卫星测控数管分系统及应用
2017-09-14范颖婷朱振华王军旗
范颖婷,朱振华,王 震,顾 强,王军旗,闫 奎
(上海卫星工程研究所,上海 201109)
基于双总线的FY-4卫星测控数管分系统及应用
范颖婷,朱振华,王 震,顾 强,王军旗,闫 奎
(上海卫星工程研究所,上海 201109)
介绍了风云四号(FY-4)卫星测控数管分系统特点及其应用。给出了测控数管分系统的组成和工作流程。采用CCSDS协议分包遥测,提出了虚拟信道遥测包调度策略、遥测包传输灵活配置策略、高精度高频可编程遥测,以及境外遥测全程采集4种分包遥测优化方法,实现了自主动态遥测采集和下传、在轨遥测异常排查、重点遥测波道高精度高频采样、卫星发射至定点过程的遥测盲区消除。分包遥控采用遥控数据优先级选择策略,保证了遥控与程控指令同时输出,实现了卫星发射至定点全过程的程控管理功能。设计了部件级和整星级故障管理策略,对部件级故障具备一定自主管理功能,其检测策略可对部件级故障进行诊断与切换重组,实现了对卫星重要故障状态的监视与应急处置。采用1553B+SpaceWire双总线结构,既满足了高低速数据使用需求,又提高了数据传输接口的通用性,同时对卫星重要参数有备份与恢复功能。FY-4A星表明:其测控数管分系统实现了预期的功能。
CCSDS协议; 分包遥测遥控; 调度配置策略; 高精高频; 境外遥测; 遥控优先级; 程控; 安全管理
0 引言
FY-4卫星是我国第二代静止轨道气象卫星,主要任务是接替FY-2卫星以确保我国静止轨道气象卫星观测业务的连续、稳定,实现静止轨道气象卫星更新换代。随着星上终端及下位机微处理器的普遍使用,其自主性越来越强、应用过程越来越丰富,传统的PCM遥测遥控体制因其固定采样率、固定编排格式,以及指令码距要求等的局限性,已不能满足星上复杂多变的数据源的传输要求和功能灵活性要求,因此对FY-4卫星测控系统提出了分包遥测、遥控体制的要求。与第一代静止轨道气象卫星和其他遥感、通信卫星相比,FY-4卫星有更多的遥控上行通道用于地面根据气象应用情况进行突发或批量的业务指令上注,同时为尽可能减少地面遥控干预,最大限度地发挥星上计算机的自主运行能力并提高安全性,对星上遥控机优先级策略、程控功能覆盖性提出了更高要求。为保证卫星在轨观测业务的连续性,卫星须具备部件级故障检测及重组、整星应急情况管理的能力。与我国第一代静止气象卫星相比,FY-4卫星的功能性能有跨越式提高,达到探测通道3倍、空间分辨率4倍、时间分辨率2倍,以及探测灵敏度0.1 ℃和探测精度0.5 ℃,卫星平台数据及载荷遥感数据是第一代静止轨道气象卫星的20倍,这对整星高低速数据的有效传输提出了更高的要求。
FY-4卫星的分包遥测采用了虚拟信道遥测包调度、遥测包传输灵活配置、高精度高频可编程遥测方法,以及境外遥测全过程采集;分包遥控采用基于5路遥控数据的优先级选择方法,实现了卫星从发射至定点及在轨运行多项程控功能。FY-4卫星采用多种部件级故障管理策略和整星应急管理策略。FY-4卫星国内首次实现1553B+SpaceWire双总线结构星载网络传输技术,国际首次提出SpaceWire-RVTP协议。
本文介绍了FY-4卫星测控数管分系统的组成和工作原理,以及CCSDS协议的分包遥测方法在FY-4卫星中的应用特点,从遥测调度策略、配置策略、采样精度频率,以及卫星境外遥测采集等方面提出了创新的应用优化方法;介绍了CCSDS协议分包遥控方法的应用特点,特别是在指令优先级策略以及卫星从发射至定点全过程程控功能中的作用,分析了测控数管分系统作为卫星数据中心的高低速数据传输、部件故障检测及整星安全管理等的应用特点。
1 测控数管分系统简介
FY-4卫星测控与数管分系统结构如图1所示。其中:测控子系统的主要功能是提供卫星与地面间遥测、遥控和测距,为卫星地面测试、发射至定点、在轨运行和离轨提供全寿命测控服务;数管子系统的主要功能是实现星务管理及载荷基带管理。
卫星测控子系统采用S频段统一载波测控体制,采用符合CCSDS协议的分包遥测及分包遥控方案,子系统由跟踪子系统A、B和中心遥控机组成。其中:跟踪子系统提供卫星与地面测控站间的无线传输通道,通过准全向测控天线接收地面站工程上行载波信号、发送下行遥测及测距信号;将解调出的遥控副载波信号送至中心遥控机,并接收数管计算机遥测副载波信号,与上行转发的测距信号同时经载波调制及功率放大后,经测控天线下行至地面站。中心遥控机对S应答机输出的2路工程遥控副载波信号及转发系统S接收机输出的2路业务遥控副载波信号,进行副载频解调及数据识别,同时接收和识别数管计算机产生的程控PCM数据;中心遥控机和3台配电测控单元输出识别出的直接指令帧,中心遥控机将识别出的遥控注数帧送数管计算机进行进一步解析、分发。
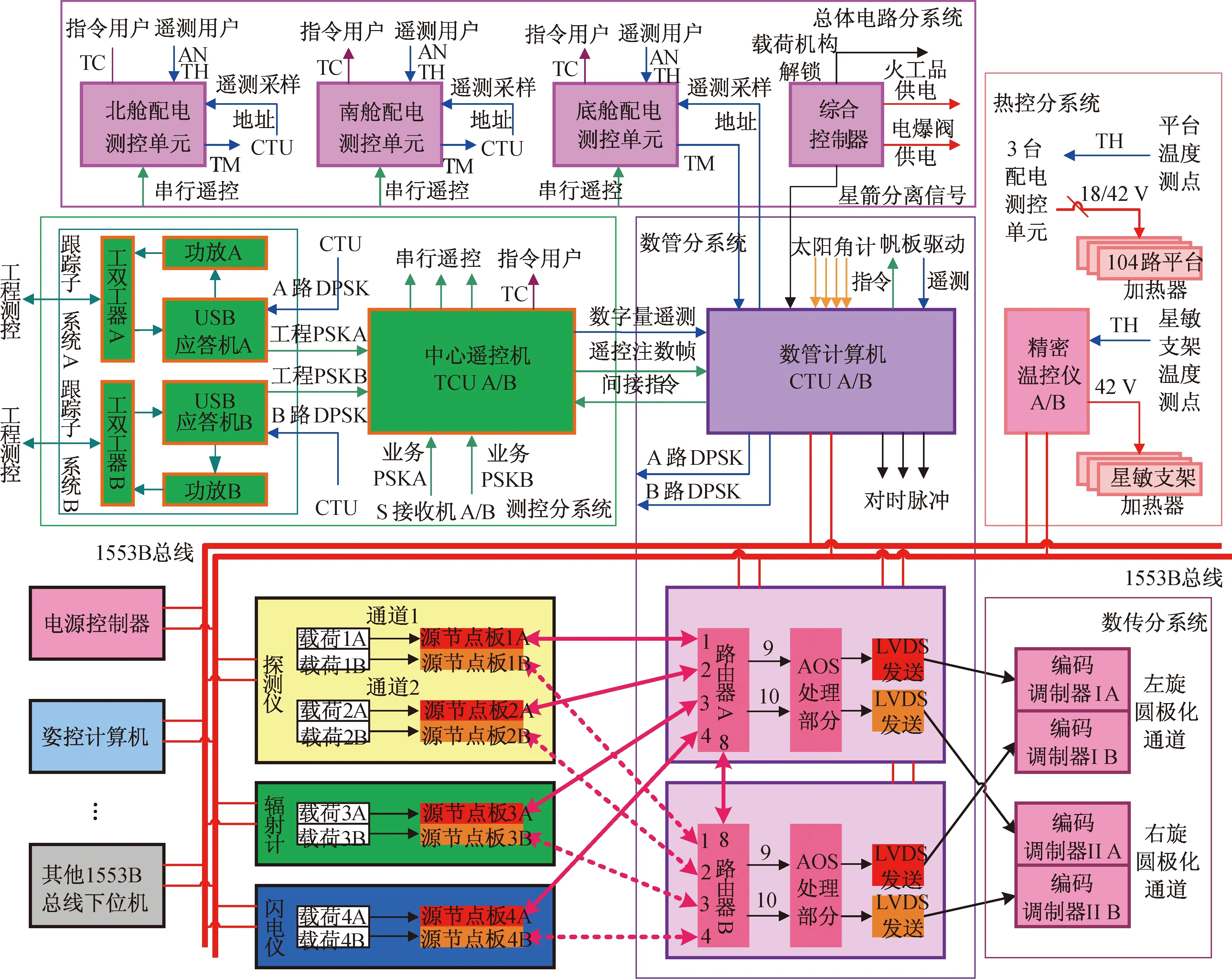
图1 FY-4卫星测控与数管分系统组成Fig.1 Structure of TT&C and data management subsystem for FY-4 satellite
卫星数管子系统采用1553B+SpaceWire双总线结构,能有针对性地处理整星高低速数据,子系统由数管计算机和数据处理器A、B组成。数管计算机的功能是实现星务管理,除与测控系统共同完成整星遥测、遥控功能外,还包括1553B总线通信管理、星上时钟管理、星箭分离及帆板展开程控、帆板闭环控制、平台主动温控、星敏支架精密温控、蓄电池程控管理,以及在轨故障检测与应急管理、在轨编程等。其中:数据处理器实现载荷基带数据管理功能,通过SpaceWire总线接收高速载荷数据,通过1553B总线接收低速工程数据,对接收到的数据进行错误检查、CCSDS协议格式化复接处理,并以LVDS接口电平形式向数传分系统输出2路平衡数据;数据处理器具网络路由选择控制功能,有星载网络故障诊断与恢复机制。
2 分包遥测应用特点
传统卫星主要采用PCM遥测体制。与分包遥测相比,其优点是格式简单,省去了遥测包的包装结构,数据紧凑、传输效率高[2]。PCM遥测体制主要包括主副帧和浮动组合两种格式,其缺点是需预先确定每个遥测的位置,无法适应信号的变化,或不能随卫星在轨运行动态随时变化,虽可编程但灵活性较低。随着星上信源自主性和随机性越来越强,大量应用过程都能产生数据包,且不同应用过程源包的数据发生率和包长各异,这就要求遥测系统具动态组织这些数据包的能力,因此CCSDS分包遥测体制更适于自主性强的多信源、多应用过程的卫星。CCSDS协议分包遥测系统如图2所示[2]。其信源、信宿、应用过程、虚拟信道和主信道间的关系如下:
a)单个信源可有多个功能、速率不同的应用过程;
b)虚拟信道面向的是应用过程而非信源,一般按功能特性组织;
c)多个虚拟信道独立调度应用过程源包,互不影响;
d)多个虚拟信道按事先安排的调度策略分时独占主信道;
e)单个应用过程源包在地面可被分发到多个信宿。
FY-4卫星采用CCSDS分包遥测设计。根据星上信源及其应用过程产生遥测的特点,将星上16个信源产生的107个应用过程分为工程数据、实时响应数据和内存下卸数据三类,分别分配了虚拟信道,三类数据的信道号、应用过程定义和用例见表1。按CCSDS协议定义,遥测传送帧格式如图3所示,遥测源包格式如图4所示[3-4]。
FY-4卫星的分包遥测方案,采用了虚拟信道遥测包调度、遥测灵活配置传输、高精度高频率遥测可编程,以及境外遥测全过程采集4种分包遥测优化方法,解决了卫星在有限遥测码速率条件下遥测包调度不及时问题,能根据卫星工作模式自主动态调度遥测采集及下传;解决了卫星在轨遥测异常难以排查问题,模拟示波器原理对重点遥测波道进行针对性高精度高频率采样;填补了卫星发射至定点过程中的遥测盲区,在卫星境外发生现象的分析中起了关键作用。
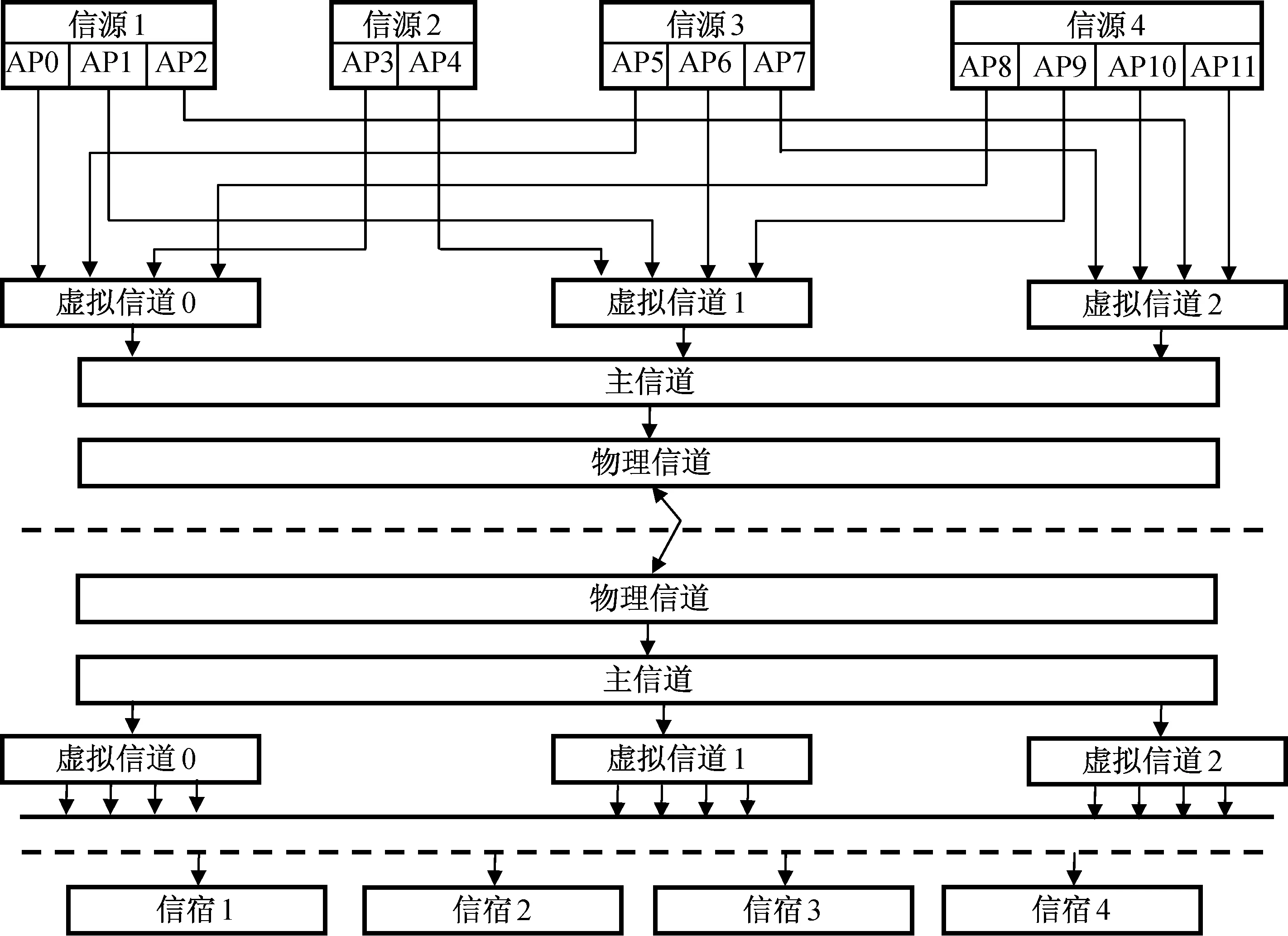
图2 分包遥测系统Fig.2 Packet telemetry system

虚拟信道数据类型应用过程用例VC0工程数据62个平台和总线下位机产生的工程遥测VC1实时响应数据39个总线下位机对遥控注数的实时反馈;星上产生应急报警信息VC2内存下卸数据6个星载计算机内存下卸
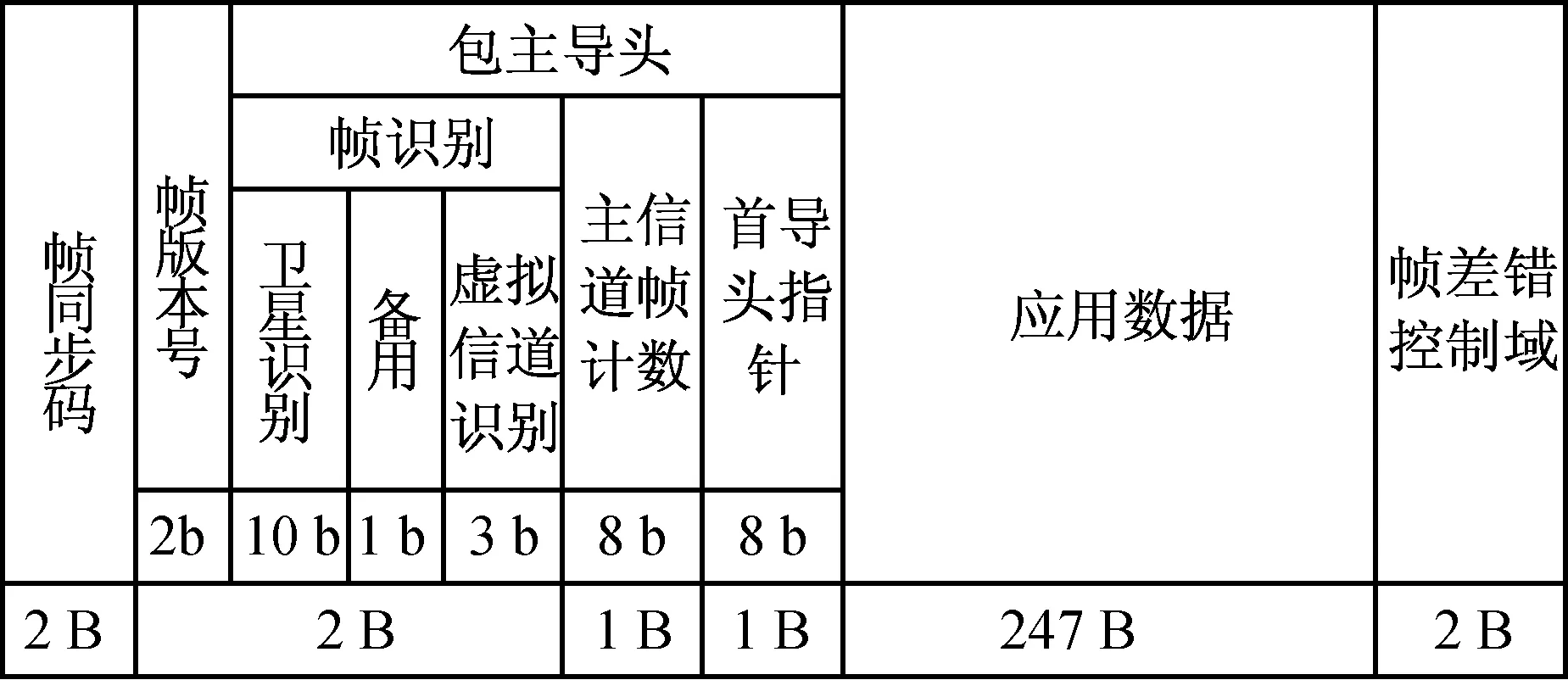
图3 遥测源包组帧Fig.3 Arranging frames with telemetry packets
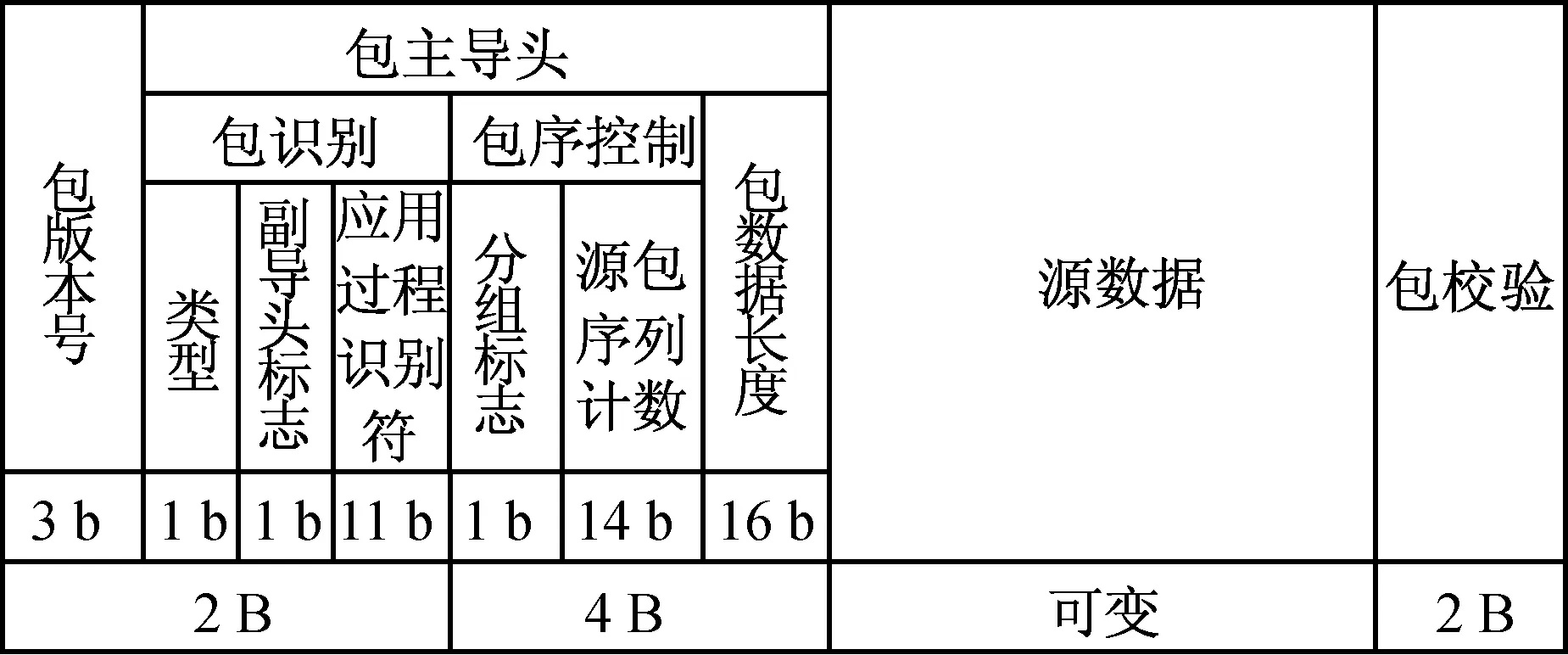
图4 分包遥测源包格式定义Fig.4 Definition of packet’s format in packet telemetry
2.1虚拟信道遥测包调度
遥测帧中的应用数据字段采用虚拟信道调度策略和包调度策略填充遥测源包。
虚拟信道调度策略的设计,采用基于优先级的动态调度方法,设置优先级为:VC1>VC2>VC0。正常情况下VC0占用主信道,当地面有突发注数、星上产生应急报警或收到内存下卸命令时,VC1,VC2占用主信道[5]。遥测源包组帧如图5所示:VC0将3个源包组帧下传,其中第3包需跨帧传输,此时星上产生报警,VC1优先级较高将VC0数据打断,等待报警数据传输完成后,VC0继续传输第3包遥测和星上其他遥测数据[5]。
VC0由卫星平台和总线下位机的工程遥测共同占用,若对遥测包不加考虑地按先进先出的原则装入VC0,则较长的工程遥测慢包将可能阻塞快包,导致时延的产生,如图6所示。如T1时刻队列中的3个遥测包X、Y、Z依次排队,先进先出,该时刻VC0首先组帧下传遥测包X,并在T2时刻继续下传遥测包X(跨帧)、Y、Z,则T1时刻在队列中排队的快包X中产生了T2-T1的延时,降低了遥测的实时性[6]。
为此,对VC0~ VC2中的工程遥测包、实时响应包和内存下卸包设计了源包调度策略,使各虚拟信道的应用过程源包能有序下传。设计原则如下:
a)每个虚拟信道调度应用过程源包的策略相互独立,互不干扰;
b)每种速率遥测包分别建立队列,相同速率遥测遵循先进先出原则;
c)按遥测包速率为优先级安排遥测组帧,遥测速率越快优先级越高(如图7所示);
d)上一遥测帧中未传完的遥测包在下一帧数据域中最先被传输;
e)遥测队列为空时,数据域中未填满部分用AA填充。
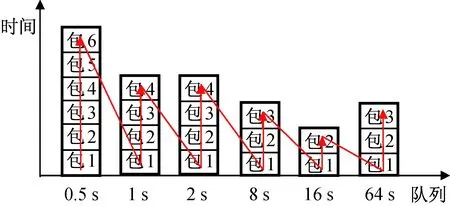
图7 遥测源包组帧优先级Fig.7 Priority of telemetry packets by arranging frame
2.2灵活配置遥测包传输
FY-4卫星共应用过程(即遥测源包)107个,每个遥测源包的传输准禁、传输速率均可单独配置,卫星发射前初始状态禁止源包19个,允许其余源包88个下传。FY-4卫星从发射至定点各阶段运行过程中实际下传的遥测源包数量统计见表2。结果表明:该方案可实现各阶段遥测自动按需下传,能自动适应信源开关状态及变化,动态增加或减少遥测源包下传数量,从而减少不必要的采集开销及人工干预。
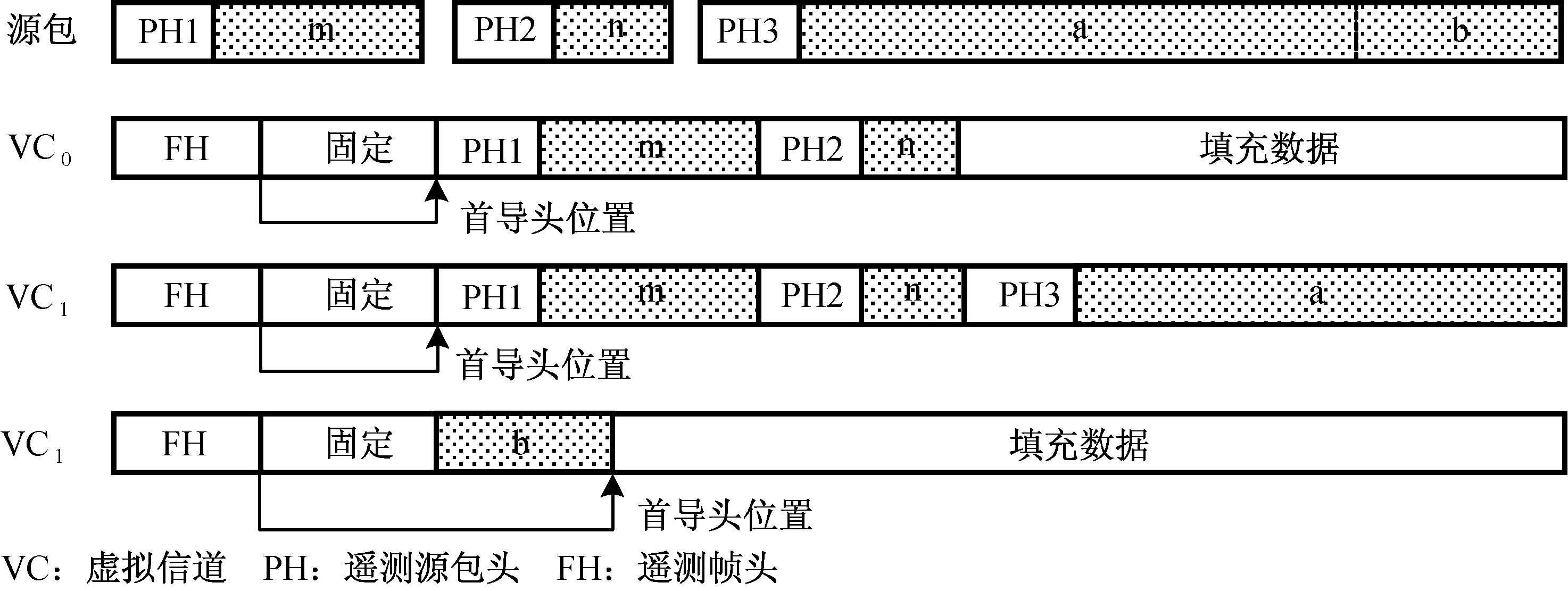
图5 分包遥测传送帧格式定义Fig.5 Definition of frame’s format in packet telemetry
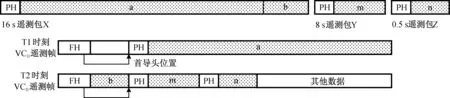
图6 遥测快包延时Fig.6 Fast telemetry packet being delayed

数据类型主动段星箭分离圣地亚哥转移轨道准同步定点后工程数据/包192837373943实时响应数据/包141461639内存下卸数据/包001001
此外,该遥测方案面向应用过程的特点使其具备强在轨编程能力,遥测包的速率由数管子系统控制,可根据需要通过地面遥控注数的形式修改数管子系统遥测功能相关参数,实现需快看的遥测加速下传、不需快看的慢速下传的要求。
北京时间12月11日01:03,FY-4A星帆板展开,测控数管分系统提取姿控三浮陀螺数据暂存于其内存中,后续通过圣地亚哥站指令将内存数据下卸至地面,通过对三浮陀螺数据以及卫星姿态角速度的分析,计算得出非约束下帆板0°转角展开弯曲频率见表3。
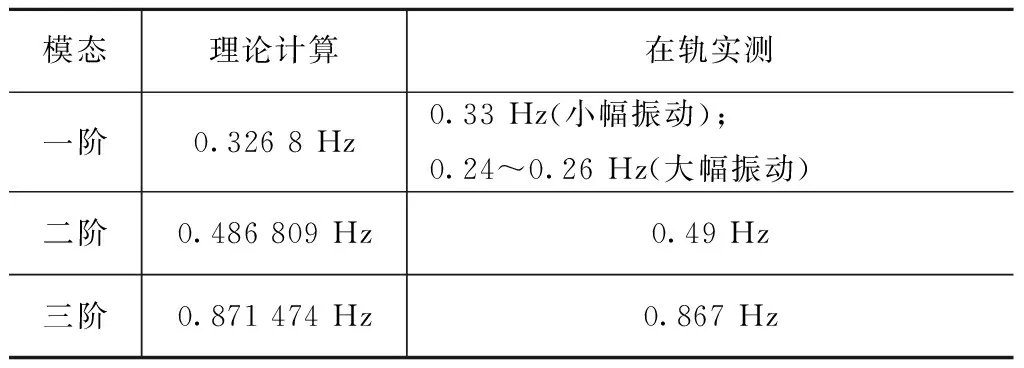
表3 帆板各阶频率
2.3高精高频可编程方法
FY-4卫星在分包遥测方案的基础上,首次提出一种高精度高频率可编程的遥测采样方法,设计的遥测包具模拟示波器工作原理的功能,可对需重点监视的遥测波道进行针对性的高精高频采样,能满足卫星各阶段测试、故障排查的使用要求。具体方法如下:
a)预定义一个遥测源包(包长待定),为其分配空闲应用过程识别符(APID)并设置其默认传输状态为不下传,以及默认传输周期。
b)按卫星具备的最高采样能力设计该遥测包采样精度,11位精度可用于表示2.44 mV以上遥测变化及波动,采样精度高于星上其他遥测(8位)。
c)计算该遥测包采样路数,根据b)设计的精度每一路遥测参数需占用遥测帧数据区1.5 B资源,建议高精度遥测对遥测帧数据区资源占用率不大于40%。
d)根据c)确定的遥测采样路数初始化该遥测包采样地址,某个遥测参数具体采样频率取决于预定义遥测包下传周期及其在遥测包中被采集的次数。
e)当星上部分遥测出现异常,特别是卫星能源、卫星姿态和母线电压电流等出现异常波动时,选择需重点监视的1路/多路参数,上注修改预定义遥测包的采样地址,设置遥测包传输状态为下传并根据需要设置传输周期。
f)地面测试系统根据遥测方案的规定对该遥测包APID进行识别并快速完成对卫星关键遥测参数的重点实时监视、数据存储、事后回放、故障排查及定位。
常规遥测采集与高精高频方法遥测采集对比效果如图8所示。高精高频采集方法的采集精度取决于星务计算机AD的最高采样精度(根据需要设计),图8中采集精度2.44 mV,是常规遥测精度的8倍,而采集频率取决于星务计算机对时间周期分频的程度。测试表明高精高频采集方法可满足星上遥测采集精度测试、故障排查的需要。
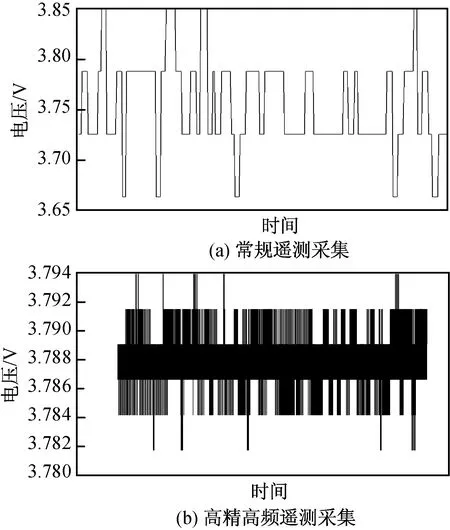
图8 常规遥测与高精高频遥测对比
2.4境外遥测全程采集
首次在高轨卫星上实现境外遥测全过程采集策略:卫星入轨初期,测控数管分系统通过1553B总线将转移轨道段的境外遥测帧发送至某总线下位机进行存储;在卫星定点后,根据地面指令将遥测帧(数传包格式封装)经SpaceWire总线调度至数传通道下传地面。
FY-4A星发射后从第一圈圣地亚哥站跟踪结束至第五次远地点点火完成期间,卫星共经历出境4次、地影期5次,其中第一、二次地影出现在卫星第一次出境期间;第三次地影出现在第二次出境期间;第四、五次地影出现在第三次出境期间。卫星出境及出现地影的时间分别见表4、5。
北京时间12月11日01:03分帆板展开归零后,分析实时遥测和回放境外遥测发现因太阳帆板背面蜂窝板内气体不断放出,对卫星+X、+Y轴产生干扰力矩最大达0.05 N·m,较光压力矩大2个量级;随着蜂窝板内气体不断放出,干扰力矩不断减小,12月11日17:00左右X轴放气结束,排气时间持续接近16 h。放气过程干扰如图9所示。

表4 过渡轨道段卫星出境时间

表5 过渡轨道段卫星地影时间
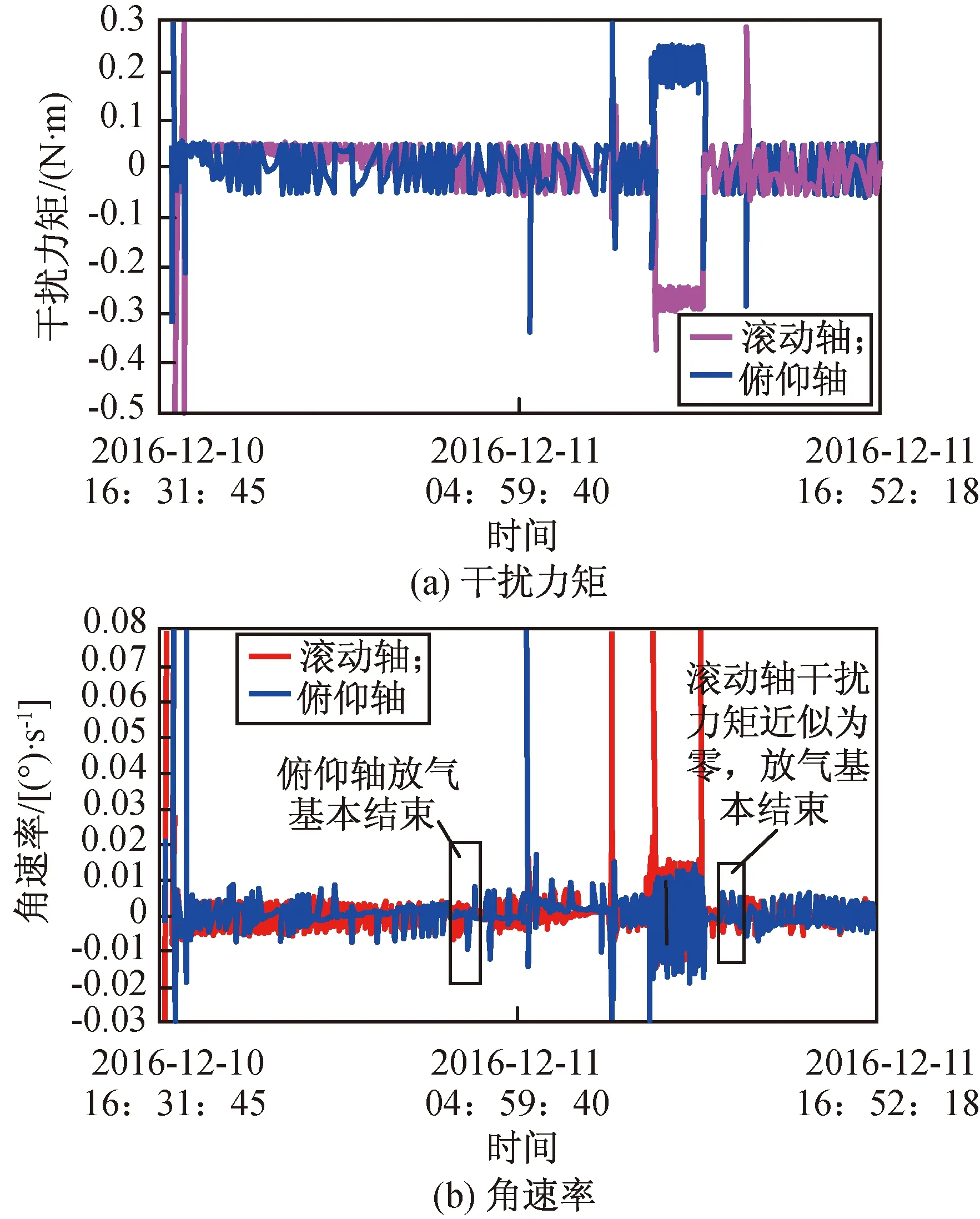
图9 帆板放气过程干扰力矩Fig.9 Disturbance torque during solar panel exhausting
FY-4A星第一次出境结束遥测跟踪开始后,通过对境外遥测数据回放发现卫星X、Y轴干扰力矩明显增大,认为卫星在近地点附近受到空气阻力作用,并首次观察到空气阻力引起的干扰力矩最大达0.35 N·m,姿控分系统诊断出喷气频繁报警,如图10所示。
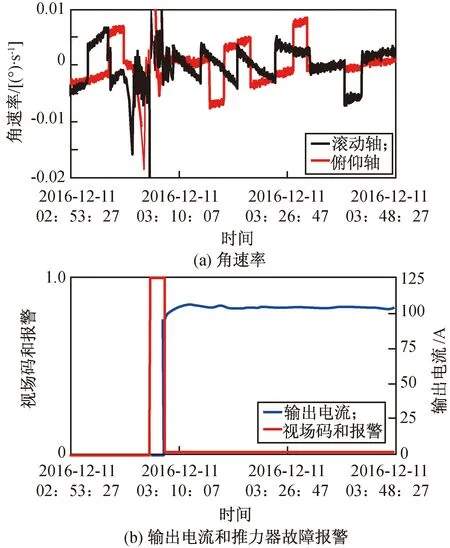
图10 推力器喷气频繁报警Fig.10 Alarm of frequent jetting for thrusters
根据空气阻力力矩计算公式,当FY-4A星处于距地球约220 km上空时,空气阻力对卫星太阳帆板(气阻系数C=1,帆板面积S=17 m2,飞行速度v=7 780 m/s,力臂L=4.7 m)产生的气动力矩0.33 N·m接近遥测估值,空气阻力对星体的力矩接近于0 N·m。
FY-4A星5次地影均发生在境外,通过对境外遥测数据分析,回放出5次地影期间电源分系统工作状态见表6。其中地影时间最长33 min,蓄电池组放电深度最大16.3%。地影期间太阳电池阵保持在0°零位,地影期内太阳阵输出电流为0 A。
3 分包遥控应用特点
FY-4卫星遥控功能主要由S频段应答机及S接收机、中心遥控机、配电测控单元、数管计算机和各总线下位机等共同完成。CCSDS协议分包遥控设计考虑了静止轨道气象卫星的应用特点,遥控信息设计分类如图11所示。遥控信息按数据格式可分为直接指令帧和遥控注数帧;遥控注数帧按数据格式分为间接指令、内部指令和软件指令,其中间接指令最终由中心遥控机或配电测控单元输出脉冲式指令,而内部指令、软件指令由各总线下位机执行,载荷工作指令是一种特殊格式的软件指令。
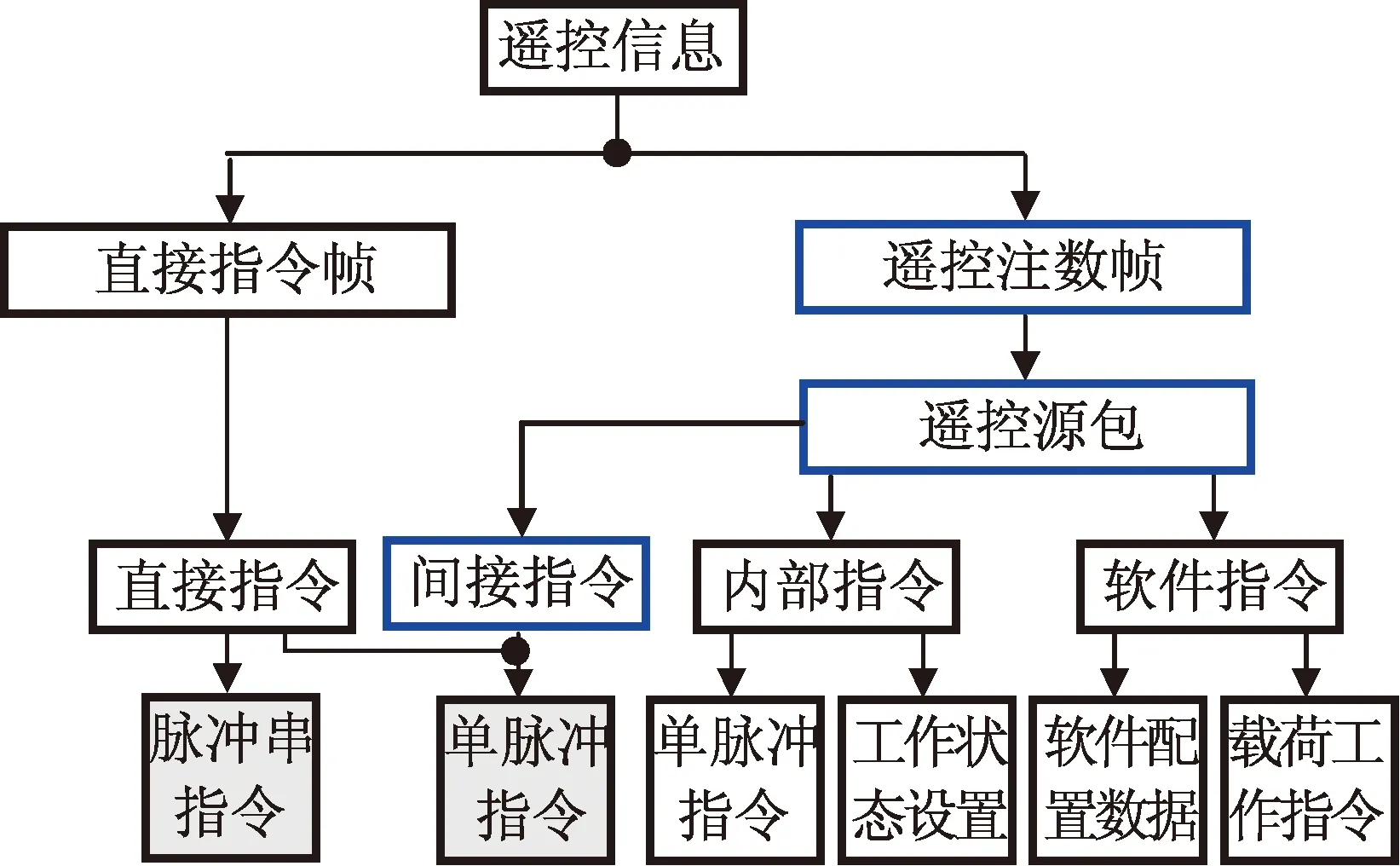
图11 卫星遥控信息分类Fig.11 Classification of telecommand
FY-4卫星在分包遥测方案基础上,采用了基于5路遥控数据的优先级选择方法,并充分发挥程控指令时间符合性好、可靠性高等优点,实现了卫星从发射至定点在轨运行多项程控功能。FY-4卫星采用的遥控机优先级策略和两种分包遥控的创新应用方法,解决了卫星多路遥控上行与程控指令冲突的难题,保证了遥控与程控指令同时得到输出,简化了星地操作流程;测控数管分系统覆盖了整星全部9项程控管理,功能和性能均达到指标要求。
3.1遥控机优先级策略
FY-4卫星中心遥控机接收工程A、B,业务A、B共4路遥控副载波上行信号(分时工作),进行副载频解调及数据识别,同时接收数管计算机输入的程控数据(即间接指令)。为确保地面发送的4路遥控副载频信号与数管计算机输入的程控数据不发生冲突,提出并设计中心遥控机A、B机分别设置不同的优先级,顺序如下:
a)中心遥控机A,工程A>业务A>程控>工程B>业务B;
b)中心遥控机B,业务B>工程B>程控>业务A>工程A。
根据上述指令优先级设置,指令执行逻辑见表7。当数管计算机发送程控数据同时向地面发送遥控指令时,能确保中心遥控机中的1台遥控优先级始终高于数管程控,中心遥控机A、B机可分别输出遥控与程控指令,有效解决了程控和地面遥控同时发令的冲突问题并简化了星地操作流程。
3.2程控功能覆盖能力
卫星运行过程中的程控指令包含间接指令、内部指令和软件指令,指令生成后分别按时间顺序进入队列排队,时间符合后测控数管分系统将指令码送中心遥控机或总线下位机进行处理执行。
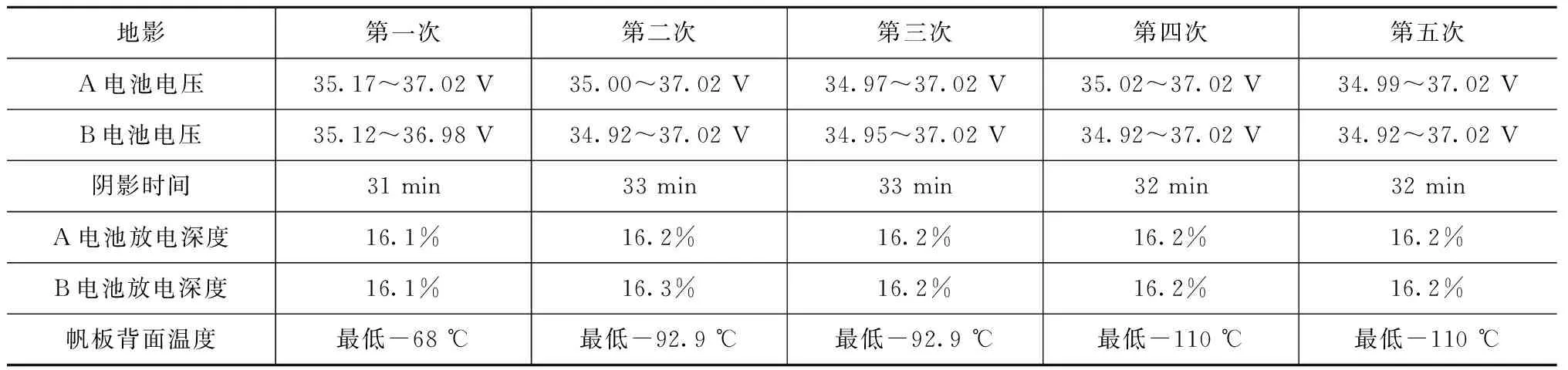
表6 五次地影期间电源工作情况
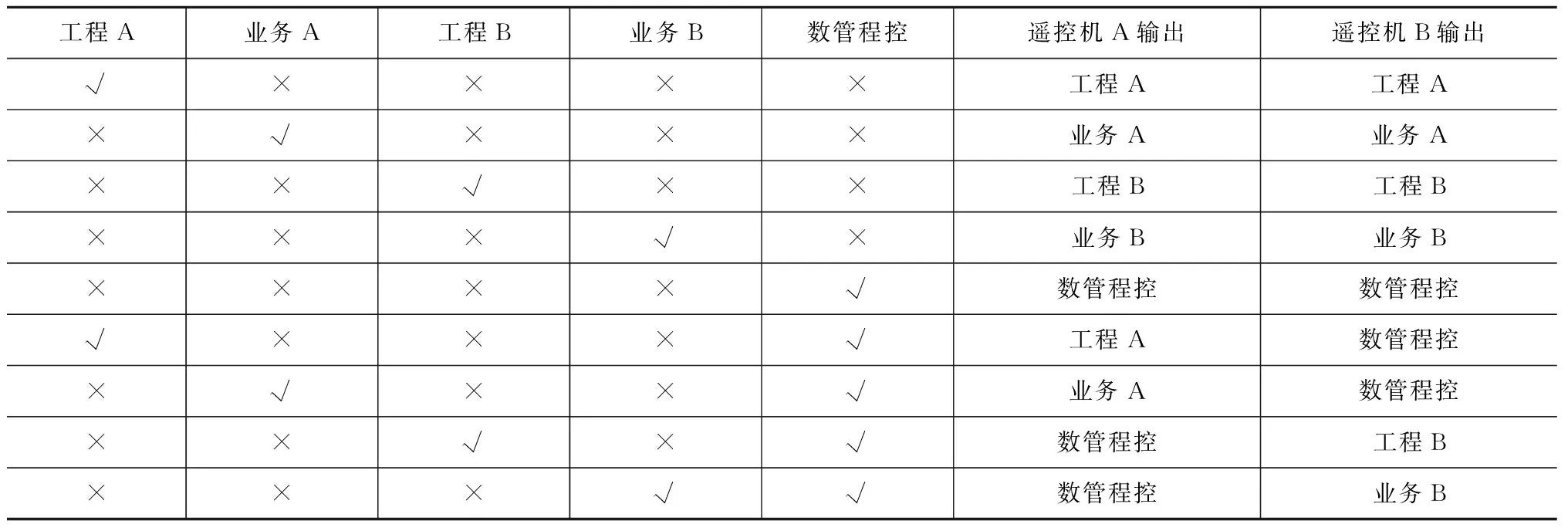
表7 遥控机指令执行逻辑
为尽可能减少地面遥控干预、最大限度发挥程控指令作用使卫星自主运行并提高安全性,FY-4卫星的程控指令设计遵循以下原则:
a)程控间接指令对直接指令具备全覆盖能力,但从安全考虑应禁止部分火工品、载荷机构和推力器等威胁卫星安全的间接指令;
b)从卫星安全考虑,限制程控间接指令执行脉宽最大2 040 ms;
c)程控内部指令、软件指令均根据卫星任务实际需要配置;
d)严格约束程控指令产生算法及判据,防止误触发。
按上述原则设计同时充分考虑卫星本身功能需求,测控数管分系统共实现卫星从发射至定点全过程的程控管理功能9项,其中平台主动温控、星敏支架精密温控、电源蓄电池管理,以及太阳帆板闭环控制为在轨长期运行程控,程控功能执行效果见表8。
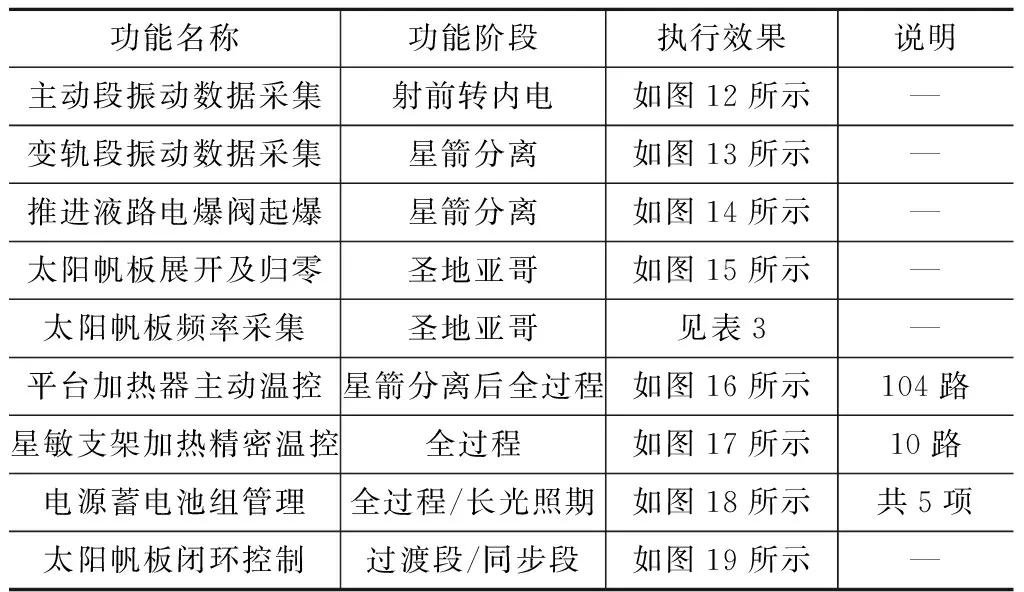
表8 程控功能执行效果
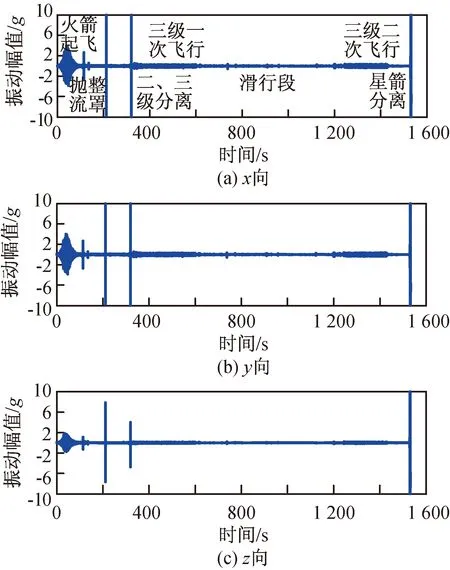
图12 主动段振动Fig.12 Vibration in active phase
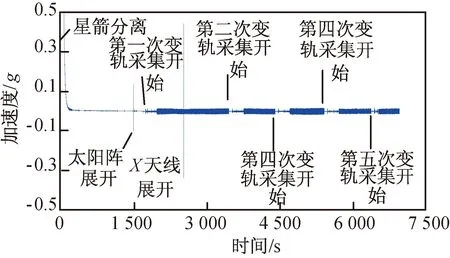
图13 变轨段振动Fig.13 Vibration in orbit maneuver phase
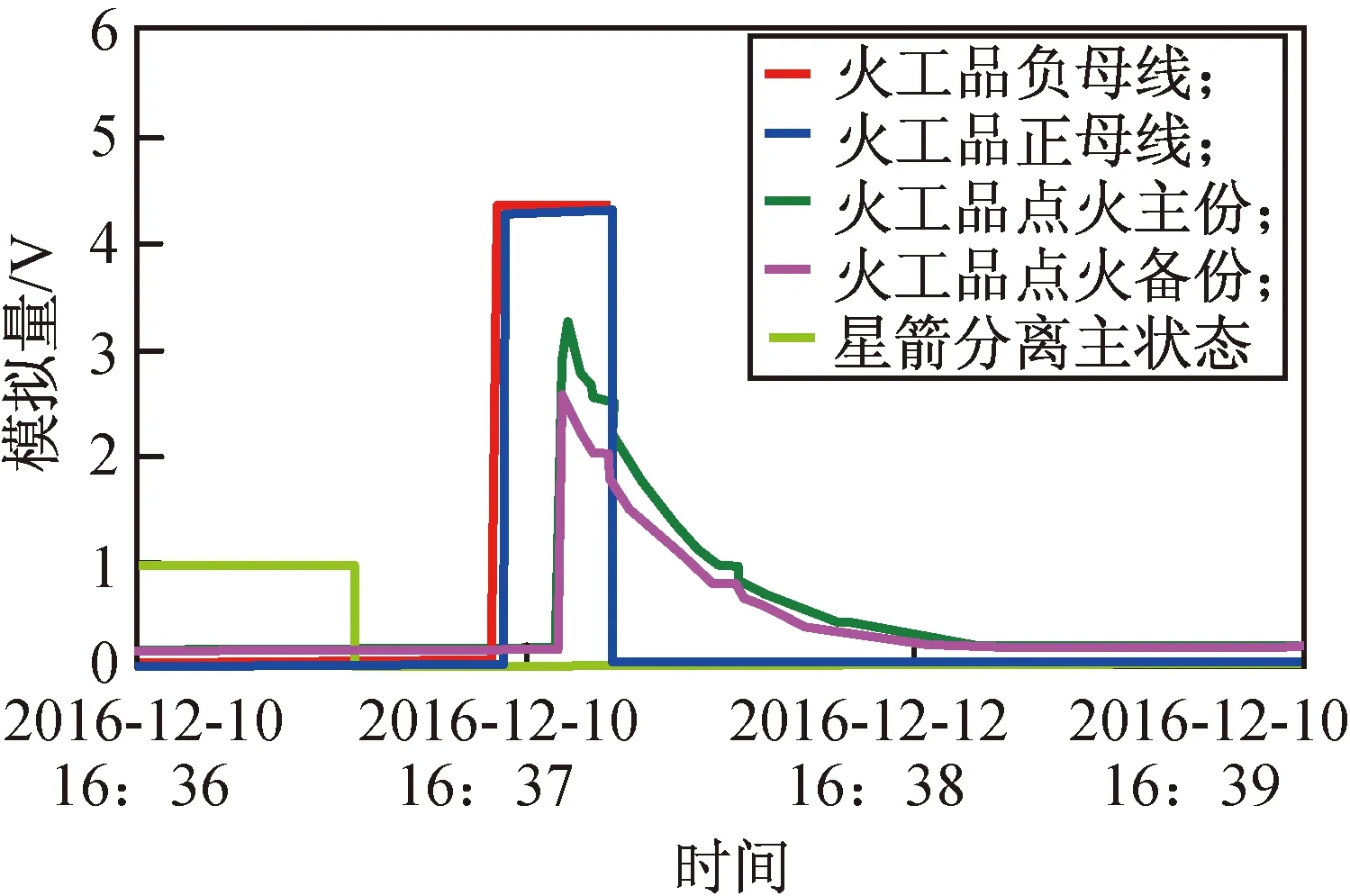
图14 推进液路电爆阀起爆状态Fig.14 Initiation of explosive valve of propellant pipe
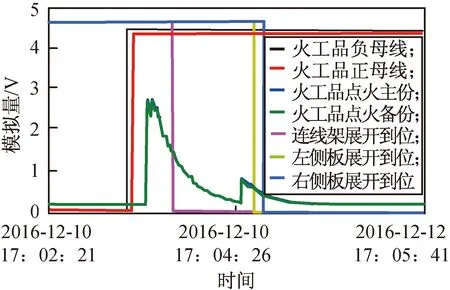
图15 太阳帆板展开及归零Fig.15 Solar panel deployment and zeroing
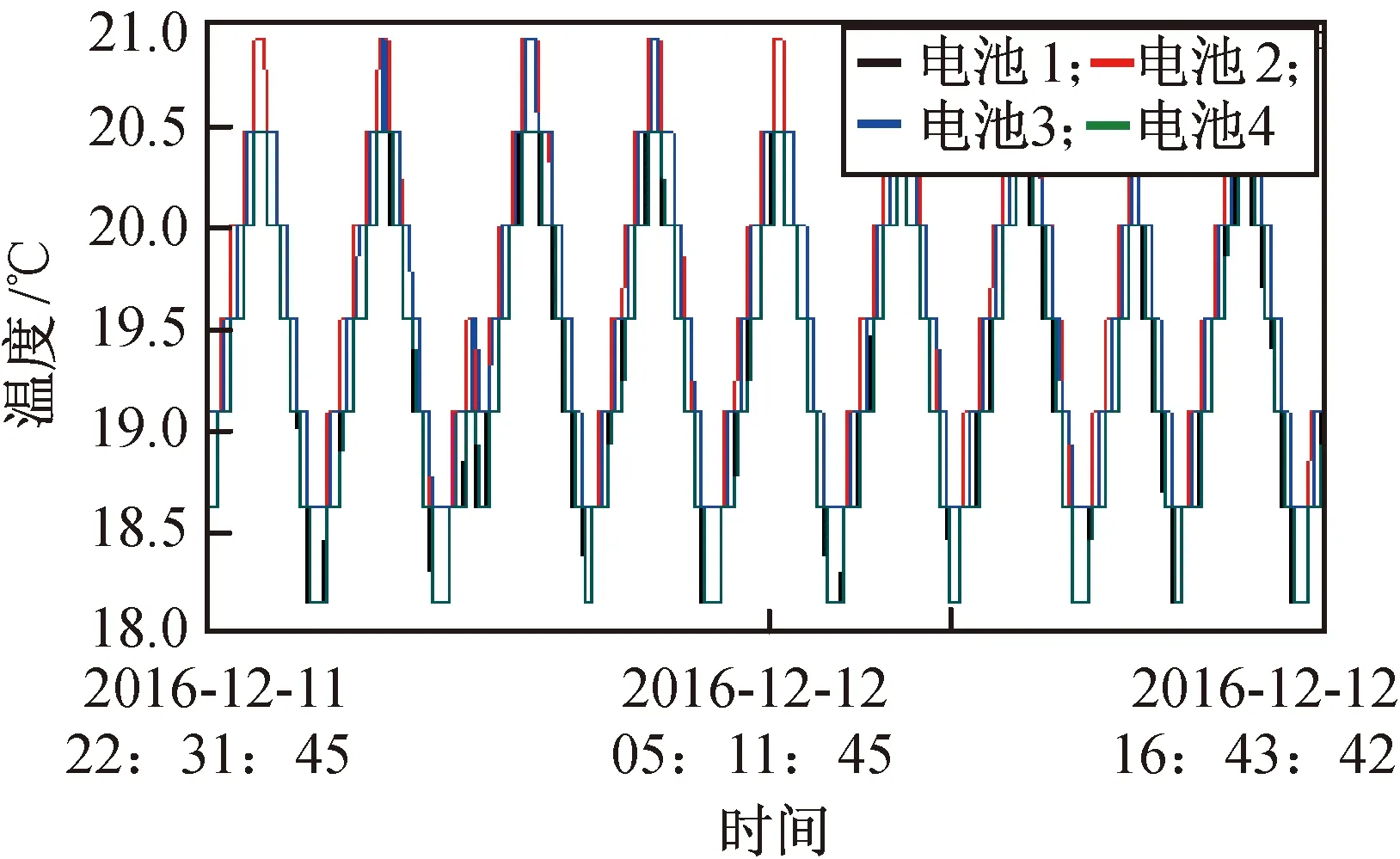
图16 蓄电池组B在轨主动温控Fig.16 Active temperature management of batteries B
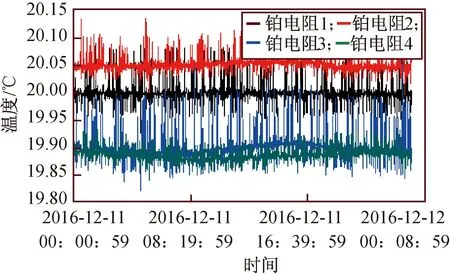
图17 星敏支架1在轨精密温控Fig.17 Fine temperature control of sensor support 1
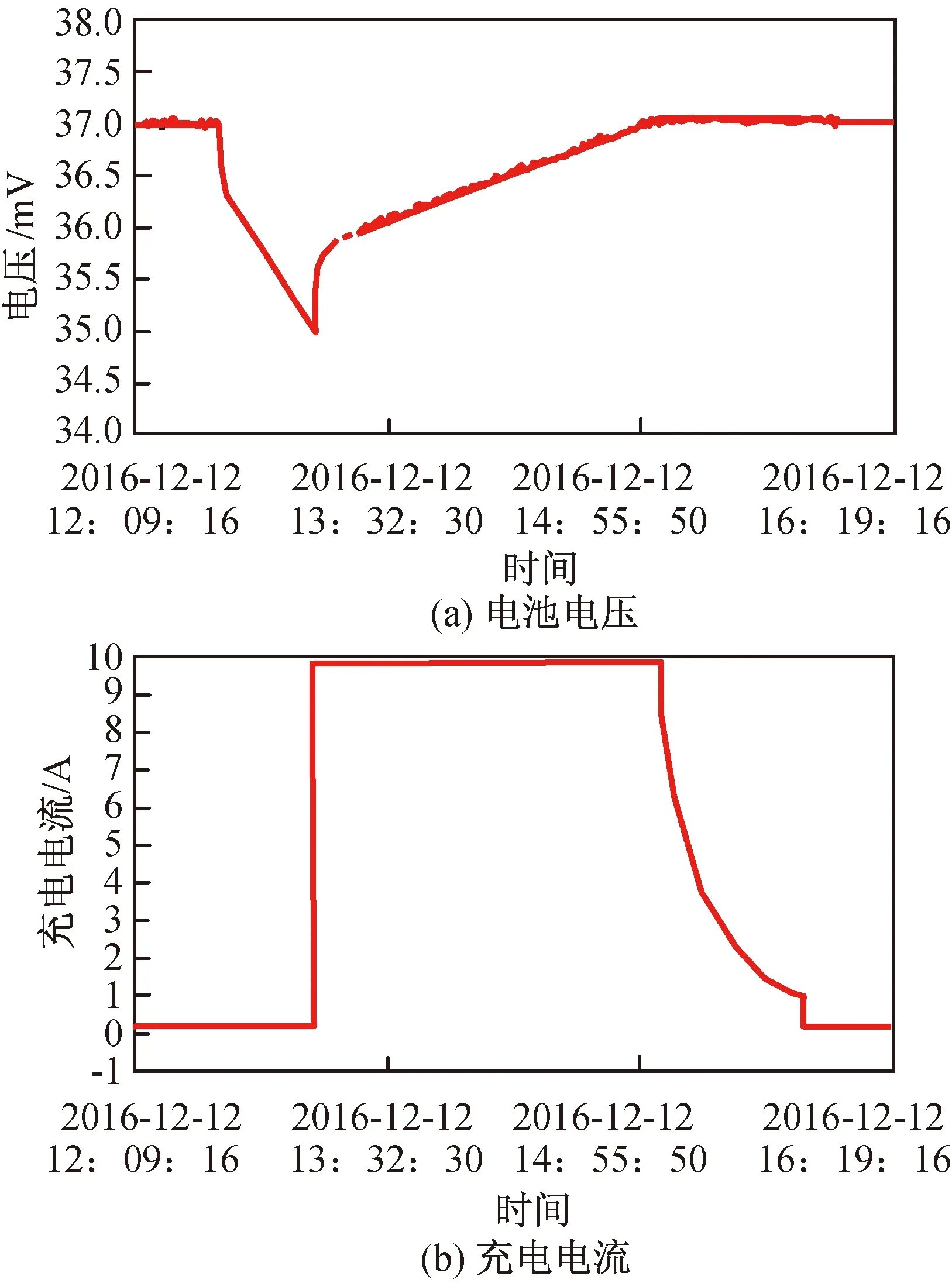
图18 蓄电池组A程控充电Fig.18 Charging of batteries A by program control
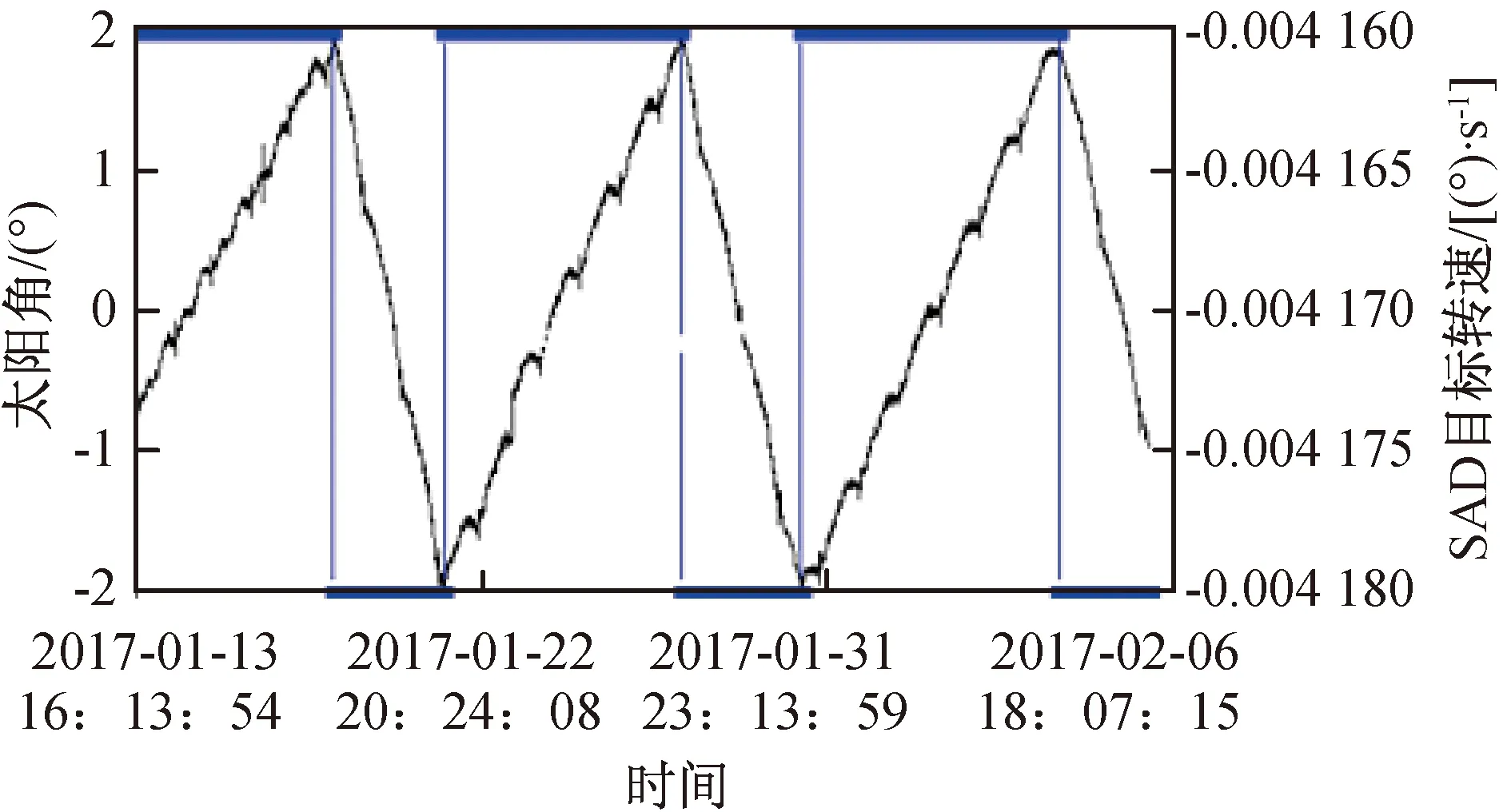
图19 太阳帆板在轨闭环控制Fig.19 Closed-loop control of solar panel
由表8、图12~19可知:发射阶段测控数管分系统正确完成了主动段、变轨段振动数据的采集,星箭分离后完成了推进电爆阀起爆、帆板展开及频率采集,在卫星飞行全过程实现平台104路加热器开关控制及星敏支架PID控制(精度达到20 ℃±3 ℃且每15 min温度变化不大于±0.1 ℃),以及电源蓄电池组管理、太阳帆板闭环控制(控制精度±2°)。
4 故障及应急管理
FY-4卫星测控数管分系统作为卫星平台及载荷的数据管理中心,对控制计算机、电源下位机等关键单机,以及自身的重要参数具备备份与恢复功能;对部件级故障具备一定的自主管理功能,设计相应的检测策略以实现部件级故障诊断与切换重组;同时实现卫星能源安全、姿态安全等重要故障状态监视与应急处置。
4.1部件故障管理策略
为避免部件级故障蔓延至整星,影响卫星安全,对星上可能出现的部件级故障进行影响域及措施分析,特别是涉及长期运行程控功能判断条件的部件,共梳理部件级故障管理8项,测控数管分系统对测控上下行通道故障、热敏电阻标称电压异常、外部太阳帆板驱动器、星敏精密控温仪及电源通信故障、分系统自身热起动复位异常及1553B总线通信故障等进行周期性检查,对检测到的部件级故障按相应故障策略进行处置,见表9。
虽然以上部件级故障自FY-4A星发射至今并未发生,但地面测试阶段多次验证均能实现检测:卫星测控上下行通道畅通;测控数管分系统长期运行的4项程控功能不因部件通信异常或基准电压异常而导致误判;分系统及各下位机能发现1553B总线通信异常并及时复位ACE芯片;数管计算机能主动置不健康状态,防止进入由自身循环热起动状态导致的系统运行故障中,从而保证卫星运行安全。
4.2整星应急管理策略
根据对整星故障的影响域及措施分析,将危及整星安全的故障分为卫星姿态失控故障和卫星能源异常故障,其中:姿态失控故障分为姿控进入应急线路(EC)模式、进入太捕模式;能源异常故障按蓄电池组的过放程度分为一级、二级和三级过放。测控数管分系统对以上故障模式进行自主诊断和应急状态管理,安全控制流程如图20所示。分系统对应急状态管理策略如下:
a)当姿控进入EC、太捕模式,能源进入二级、三级过放时,数管清空业务指令队列;
b)当姿控进入EC、太捕模式时,分系统通过程控关闭整星不必要的负载单机,并设置主动温控应急模式以降低整星功耗,同时帆板归零;
c)当能源进入一级过放时,分系统通过设置主动温控应急模式以降低整星功耗;
d)当能源进入二级过放时,分系统通过程控关闭整星不必要的负载单机,同时设置主动温控极限低温模式尽可能降低整星功耗;
e)当能源进入二级、三级过放时,分系统设置蓄电池过放保护允许,为断开放电开关做准备;
f)当能源进入三级过放,分系统通过程控断开蓄电池组放电开关,防止锂电池进入不可逆的损坏状态;
g)卫星进入应急状态后,及时保存境外遥测防止卫星姿态翻转导致遥测信号中断;
h)分系统执行的安全控制流程操作,通过遥测及报警状态通知地面系统;
i)分系统根据故障判断条件,通过剔野、求平均、时间累计等可靠性措施避免误判而导致开关误动作;
j)某些单机非关键参数出现短时间异常,经过故障容错分析不影响卫星业务运行;
k)除特殊规定外,分系统对姿控安全操作、能源安全操作的准禁由地面注入;
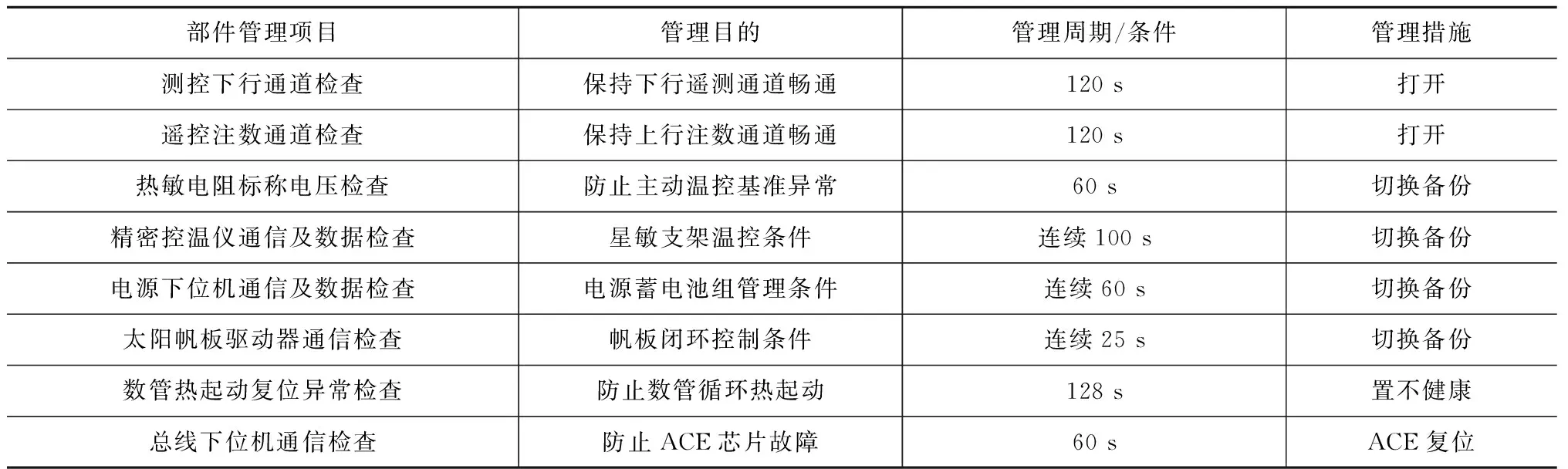
表9 部件级故障管理
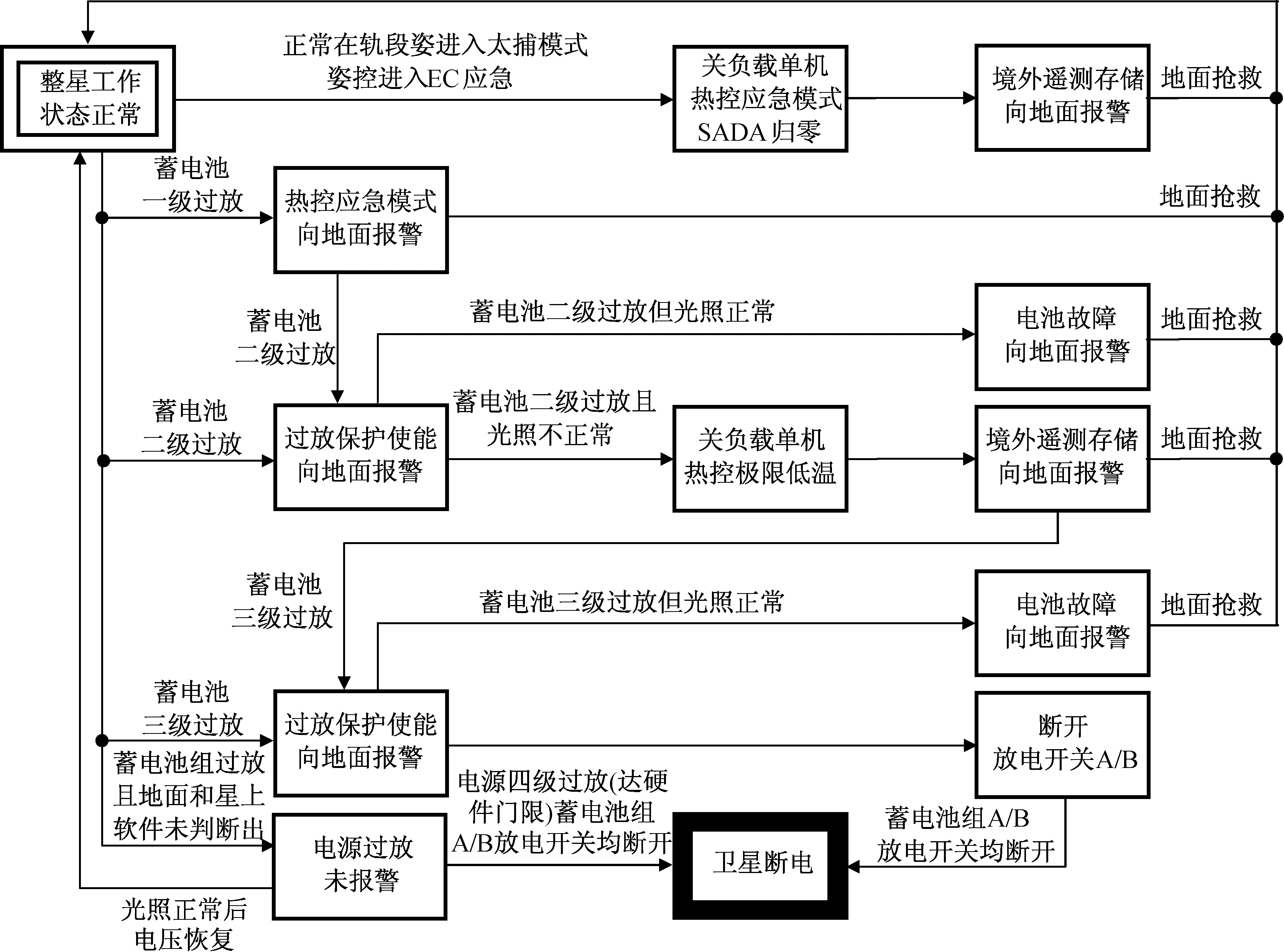
图20 卫星安全控制流程Fig.20 Procedures of security control
l)分系统安全控制流程使用的判据门限调整均通过遥控注数进行修改。
虽然自FY-4A星发射至今,上述卫星姿态失控故障和卫星能源异常故障并未发生,但地面测试阶段及热真空试验多次验证,分系统能及时检测出姿态失控故障并采取相应措施;能分别检测出能源一级、二级、三级过放,并依次采取对应保护措施;按故障分别降低负载尽可能延长卫星抢救时间;防止锂电池进入不可逆损坏状态。
5 高低速数据传输
虽然1553B总线的抗干扰性强、数据传输可靠、适合集中控制,但码速率仅1 Mb/s,无法支持更高速率的数据传输需求[7]。SpaceWire总线是欧空局为航天应用而设计的一种高速、可升级、低功耗、低成本的串行总线(传输速率2~400 Mb/s),是一种点对点、全双工通信或通过路由交换机形成复杂通信网络的总线形式。FY-4卫星测控数管分系统在国内首次采用1553B+SpaceWire双总线结构,SpaceWire总线接收各路高速载荷遥感数据,由AOS合路及处理完成与1553B总线低速数据复接,通过LVDS接口向数传分系统输出两路速率100 Mb/s的CCSDS格式数据流(如图1所示),既满足高低速数据的使用需求,又提高了数据传输接口的通用性。
5.1SpaceWire-RVTP协议
FY-4卫星在SpaceWire总线协议的基础上,国际上首次提出一种远程虚拟信道传输(RVTP)协议[8]。与基本SpaceWire协议相比,RVTP协议设计是将一个CCSDS AOS虚拟信道帧封装到SpaceWire数据包中,通过SpaceWire网络从源节点传输到目标节点;目标节点从SpaceWire数据包中提取AOS虚拟信道帧再传输给目标用户使用;对SpaceWire数据包具有协议符合性检测功能[9]。基本SpaceWire协议与SpaceWire-RVTP协议流程如图21所示。

图21 基本SpaceWire协议与SpaceWire-RVTP协议流程Fig.21 Procedures of basic SpaceWire and SpaceWire-RVTP protocols
5.2网络路由控制策略
FY-4卫星采用SpaceWire总线传输的高速载荷数据通道有4个,分别为多通道扫描成像辐射计、大气垂直探测仪通道1、大气垂直探测仪通道2和闪电成像仪,SpaceWire网络路由控制主要完成上述载荷数据包传输过程路径选择,采用路径寻址方式由SpaceWire协议芯片完成,如图22所示[10]。除默认路径外,地面可通过遥控注数帧配置载荷端SpaceWire端口地址以实现载荷端SpaceWire数据包的链路传输路径切换。
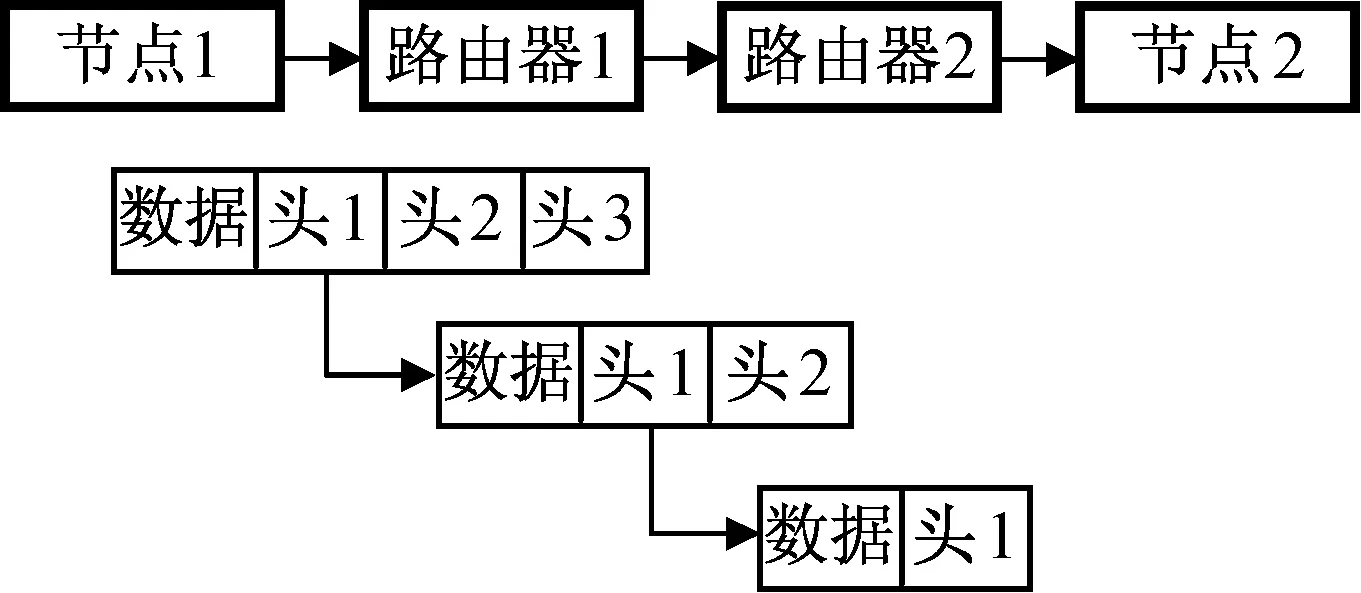
图22 路径寻址方式Fig.22 Path of addressing mode
由图1可知:数据处理器具有主、备网络结构,通过网络路由器互联,可实现任意载荷通道(包括主、备份通道共8个)路由传输至任意数传通道(包括主、备份通道共4个)。
5.3网络流量控制策略
FY-4卫星SpaceWire网络流量控制策略由数据处理器实施。为避免数据突发传输导致网络传输丢包异常,载荷节点准备好一个SpaceWire数据包即向数据处理器发送数据传输请求,数据传输过程中,当某个端口路由传输超时时,数据处理器将清除该端口路由路径防止其独占通道,以便于其他端口使用该传输路径,超时周期设置为1.3 ms。
6 结束语
本文介绍了FY-4卫星测控数管分系统的设计特点及应用情况。FY-4卫星采用4种分包遥测优化方法,解决了卫星在有限遥测码速率条件下遥测包调度不及时问题,能根据卫星工作模式自主动态调度遥测采集及下传;解决了卫星在轨遥测异常难以排查问题,模拟示波器原理对重点遥测波道进行针对性高精度高频率采样;填补了卫星发射至定点过程中的遥测盲区,对卫星境外所发生现象的分析起了关键作用。FY-4卫星提出的2种分包遥控创新、应用方法,解决了卫星多路遥控上行与程控指令冲突的难题,保证了遥控与程控指令同时得到输出,简化了星地操作流程;测控数管分系统覆盖整星9项程控管理,功能和性能均达到指标要求。FY-4卫星采用1553B+SpaceWire双总线结构,既满足了高低速数据使用需求,又提高了数据传输接口的通用性,同时对卫星重要参数具备备份与恢复功能;对部件级故障具备一定自主管理功能,设计了相应的检测策略实现部件级故障诊断与切换重组;实现了卫星多级能源安全、姿态安全等重要故障状态监视与应急处置。
随着卫星上下行码速率的进一步提高、星上各终端及下位机微处理器的普遍使用和功能性能的提高,CCSDS分包遥测、遥控体制因面向应用过程、对需求变化适应性强等特点,将发挥更明显的优势。FY-4卫星采用的虚拟信道遥测包调度、灵活配置遥测包传输和高精高频可编程方法可有效用于其他采用分包体制的卫星系统;境外遥测全程采集方法可推广至其他高轨卫星;部件故障检测策略、多级故障应对策略也可供其他卫星参考使用。此外,FY-4卫星测控方案采用集中管理、分布采集和驱动的实现形式,数管部分的星务管理、载荷基带数据管理采用集中管理形式,体现了综合电子的部分设计理念。今后,随着综合电子技术研究的逐渐深入,可在统一的体系结构、星载信息网络、标准硬件和软件接口、星载总线标准化、星载软件构件化,以及容错重构能力等方面,基于统一的任务调度和管理,建立一体化的卫星综合电子系统,提高整星的功能密度及系统可靠性,实现系统的有效在轨维护和重构。
[1] 姜昌. 分包遥测、遥控与AOS设计思想初探[J]. 飞行器测控技术, 1996, 15(3): 5-13.
[2] 谭维炽, 顾莹琦. 空间数据系统[M]. 北京: 中国科学技术出版社, 2004: 60-77.
[3] ESA. Packet telemetry standard: ESA PSS-04-106[M]. Issue 1. Paris: ESA, 1988.
[4] CCSDS. Packet telemetry, CCSDS 102.0-B-5, blue book[M]. Washington D.C.: CCSDS, 2001.
[5] 谭维炽, 顾莹琦. CCSDS下行链路虚拟信道调度方法及性能分析[J]. 中国空间科学技术, 2001, 21(3): 29-35.
[6] 范颖婷, 朱振华, 王军旗. CCSDS分包遥测在某卫星型号中的应用[J]. 飞行器测控学报, 2012, 31(S1): 77-80.
[7] 中国航空工业总公司第六一五所, 中国航空工业总公司第三○一所. 数字式时分制指令/响应型多路传输数据总线: GJB 289A—1997[S]. 北京: 国防科学技术工业委员会, 1997.
[8] CCSDS. AOS space data link protocol, CCSDS 732.0-B-2, blue book[M].Washington D.C.: CCSDS, 2006.
[9] ECSS. Space engineering, Space Wire Links, nodes, routers and networks: ECSS E 50 12A[S]. Noordwijk: ECSS, 2006.
[10] EADS Astrium: SpW-10X Space Wire router user manual[M]. Paris: EADS, 2008.
ApplicationsofTT&CandDataManagementSubsystemBasedonDoubleBusforFY-4Satellite
FAN Ying-ting, ZHU Zhen-hua, WANG Zhen, GU Qiang, WANG Jun-qi, YAN Kui
(Shanghai Institute of Satellite Engineering, Shanghai 201109, China)
The characteristics and application of TT&C and data management subsystem for FY-4 meteorological satellite were introduced in this paper. The composition and operation of the subsystem were presented. The CCSDS packet telemetry was adopted. The four telemetry optimal methods of scheduling policy of virtual channels and telemetry packets, configuration policy for telemetry packet, high precision and high frequency telemetry and the offshore telemetry collection method were put forward, which realized the autonomous dynamic collection and download of telemetry, telemetry abnormity checking on orbit, high precision and high frequency telemetry for key telemetry channel and elimination of telemetry dead space during launching to pointing of the satellite. The priority policy of telecommand data was applied in telemetry, which ensured the telecommand and program control command outputting simultaneously and realized the all program control functions from launching to pointing of the satellite. The management strategies of the component level failures and the whole satellite level failures were designed, which had the capacity to backup and recovery for the key units’ parameters and autonomic diagnosis and restructure for the component level failures, so it realized the monitoring and emergency handling of the key failures of the satellite. The double-bus of 1553B and SpaceWire were used, which satisfied the requirements of high speed data and low speed data and improved the versatility of the data transmission interface. And it provided functions of the important data backup and recovery of the satellite. The flight results of FY-4A satellite showed that it’s TT&C and data management subsystem complemented the function proposed.
CCSDS protocols; packet telemetry and telecommand; scheduling and configuration policy; high precision and high frequency; offshore telemetry; priority of telecommand; stored program control; security management and emergency handling
1006-1630(2017)04-0104-14
2017-06-22;
:2017-07-27
范颖婷(1985—),女,工程师,主要从事卫星测控数管分系统设计与应用。
V447
:ADOI:10.19328/j.cnki.1006-1630.2017.04.013
