某民用飞机显示系统仿真器的设计与实现
2017-09-12徐志鑫谢祥南SHENJiaXUZhixinXIEHanXIEXiangnan上海航空无线电电子研究所上海200241ChinaNationalAeronauticalRadioElectronicsResearchInstituteShanghai200241China
沈 佳 徐志鑫 谢 寒 谢祥南 / SHEN Jia XU Zhixin XIE Han XIE Xiangnan(上海航空无线电电子研究所,上海200241)(China National Aeronautical Radio Electronics Research Institute, Shanghai 200241, China)
某民用飞机显示系统仿真器的设计与实现
沈 佳 徐志鑫 谢 寒 谢祥南 / SHEN Jia XU Zhixin XIE Han XIE Xiangnan
(上海航空无线电电子研究所,上海200241)
(China National Aeronautical Radio Electronics Research Institute, Shanghai 200241, China)
航电系统仿真平台以其灵活方便和低成本特点,支持综合航电系统的预先研究、方案设计、详细设计、系统综合,成为综合航电系统研制过程中不可或缺的设计手段。给出了IMA系统仿真平台显示系统仿真器的详细的设计和实现方案,首先介绍了IMA系统仿真平台的组成,接着介绍了显示系统仿真器的组成架构,并对显示系统仿真器的硬件配置、航电网络配置、人机交互界面和逻辑处理进行了详细的介绍。最后经过IMA系统仿真试验样件验收测试程序的测试,验证了显示系统仿真器满足验收测试程序的各项功能和性能要求,满足了该型号显示系统仿真器的试验要求。
民用飞机;IMA系统;显示系统仿真器;航电网络;人机交互
0 引言
航电系统被誉为现代飞机的大脑,其重要性不言而喻,随着航电系统不断向综合化、模块化的方向发展,其系统的复杂性,系统间的耦合性也不断增加,进而增加了系统的研制风险,因此在航电系统研制的各个阶段迫切需要建立航电系统实时仿真平台,对系统进行验证以降低设计缺陷,提高设计成熟度。
航电系统仿真平台通过对分系统和环境的仿真,提供系统验证所需的真实环境,完成系统闭环的构建,IMA系统通用处理平台作为航电系统综合信息处理的核心,以其灵活方便和低成本特点,支持综合航电系统的预先研究、方案设计、详细设计、系统综合以及试飞排故。成为综合航电系统研制过程中不可或缺的设计手段。显示系统(DS)作为IMA系统仿真平台的重要部分,是飞行员与飞行系统进行人机交互的主要媒介,对飞行任务的完成起着至关重要的作用,一直以来都是各航空大国飞机研制水平的重要标志之一。
1 IMA系统仿真平台的组成
IMA仿真平台的基本组成如图1所示。
整个IMA系统仿真平台由IMA通用处理平台,2个远程交换机(ARS)、2个RDIU以及IMA系统开发调试平台以及显示系统仿真器等组成。IMA系统仿真平台包含如下的基本功能。
1)通讯功能:平台计算机能够进行正确通讯,实现数据传输和信息交互。
2)监控功能:仿真器件能够对IMA平台和各子系统的运行情况进行监控。
3)冗余度:即容错性能。是指当互为备份的设备,有一个出现某些指定的功能故障时,仿真平台仍能正常工作。
4)功能可扩展性:对于不同的子系统,在IMA平台的驻留功能是不同的,采用模块化设计,能够满足扩展性的要求。
本显示系统仿真器基于航电系统仿真平台,用于仿真某型号民用飞机座舱显示交互功能,提高后续显示系统真件集成综合的效率。
2 DS仿真器的组成
DS仿真器作为IMA系统重要组成部分,在IMA系统仿真平台的基本框架下,由数据激励器,通讯网络,子系统逻辑处理单元,显示界面等部分组成,组织架构如图2所示。
激励器是由IMA系统开发测试平台上的飞行仿真软件提供,模拟飞行的环境,飞行的状态以及飞机自身的指示参数等数据,数据格式转换和网络通讯由RDIU和ARS以及SPM内带的ACS共同组成。核心处理单元由SPM1/SPM3等组成,完成数据的逻辑处理和转发,人机交互界面使用AFDX板卡作为通讯接口,使用VAPS工具绘画界面,用于显示PFD、Synoptic Page、EI、CAS等飞行信息和告警指示。
3 DS仿真器关键技术分析与实现
3.1 硬件设计
一个完整的DS仿真器应该由电源控制模块,数据激励器,数据网络传输模块,核心处理模块,显示器组成。图3所示为DS仿真器的硬件组成。
其中,输入电源提供220V和115V两种交流电源,220V交流电源负载能力大于4 000W(使用两套IMA系统开发调试平台时),115V交流电源用于为RDIU提供交流信号激励,采用2个电源控制模块实现对其他功能模块的供电余度,每个电源控制模块为其各自的IMA模块电源总线提供12.5V直流电源。采用带有飞行仿真数据库的工控机作为DS仿真器数据输入源,互为备份的2块RDIU实现I/O 接口和数据网关转换功能。2台ARS提供单通道、全双工、高速的符合ARINC664 part7协议要求的数据交换功能,同时提供A664网络的双通道冗余。系统处理模块(SPM) 满足ARINC653要求的实时分区操作系统,提供对多个驻留应用软件的平台处理能力; 采用带有旋极的WFDX100 AFDX板卡和NVIDIA Quadro 2000显卡的工控机作为DS显示单元,其中WFDX100 AFDX板卡实现664数据包的收发。NVIDIA Quadro 2000显卡实现DS画面的显示和多屏拓展功能。
3.2 DS仿真器的网络配置
IMA系统数据网络主要完成IMA平台的总线数据传输和数字接口的功能,系统与传感器和作动器间的远程或分布式I/O接口(RDIUs),连接IMA和第三方子系统的总线网络资源,包括传统的数据总线和网络(A664、A429、A825等)。IMA系统数据网络拓扑图如图4所示。
其中,DS仿真器的数据来源包括两部分,一部分是飞行主仿真数据直接通过交换机过来,这部分的数据有AFDX格式的,可以直接通过AFDX网络发送,还有部分则是像惯导、维护字的数据,其数据格式是429格式的,需要经过RDIU之后将429数据打包成664的包,然后再通过交换机发送;另一部分是来自飞行主仿真数据经过SPM1系统处理模块逻辑处理后的数据信息,如CAS的信息。
为了实现上述的数据通讯,首先要设置RDIU1、RDIU2、SPM1、SPM3、SPM4、DS(PFD)、OMS、FMS以及DS(EI)的IP地址,ARS交换机的路径配置,RDIU的数据格式转化的初始化配置;其次,要确定各条链路的数据源和数据目的,确定SPM内部ACR交换机的配置,包括源端口,目的端口,包长,BAG值,VL虚拟链路号,以及源端和目标端的UDP和COM口配置,以及RDIU中需要源转化数据格式和目标数据格式的配置。具体的网络配置表见表1。

表1 通讯链路配置表
由表1中第一条数据链为例,是DS的应用,传输内容为显示数据,数据源是DS,是指数据源来自SPM1的DS逻辑处理分区,数据目的是DS仿真2(EI),是指数据目的地为DS EI画面显示工控机。传给PFD画面的数据,一部分是以429格式传输的数据,通过RDIU进行429到AFDX数据格式的转化,每个应用都由A/B 2条链路来完成完全相同的任务,所有的链路设置都是唯一确定的。其中链路号300~307为PFD画面提供数据输入源,201链路为EICAS画面提供数据输入源,数据信息比较多,所以它的数据包包长为1 518,比其他链路明显要大很多。
3.3 软件实现
DS仿真器软件实现包括PFD(主飞行显示)和MFD(多功能显示)等功能和显示画面的实现。
3.3.1 功能的实现
在前面网络配置部分有提到,VL链路号300~307为PFD画面提供数据输入源,201链路为MFD的EICAS画面提供数据输入源,数据信息比较多,所以它的数据包包长为1 518,输入源主要来自飞控(FCM)的664数据和直连的429数据。仿真激励数据源的处理方式如图5所示。
同一个ipSingal会有系统SYSTEM A 的3个或多个实例作为输入源,经过Selection Criteria源选择标准和Selection Order来决定最终的输入源,当此输入源失效时,选择当前有效输入源中优先级最高的。一般664数据源优先级高于直连429数据源。
PFD画面主要是飞行状态和航向的显示,主要包括当前空速、高度、垂直速度、无线电高度、横滚角、翻滚角,磁航向等,在具体到每一个功能部分的实现依据仿真设计功能需求,如根据仿真设计需求,确定空速刻度线的范围以及空速数字显示的范围,空速刻度带显示当前空速数值正负50的范围等,刻度带上只会显示偶数数字。整个飞行过程共有11个飞行阶段,轮载、空速、发动机状态等不同的飞行条件对应不同的飞行阶段。V1,V2,VR在如下飞行阶段有效:
{ipFDASFlightPhase = 1(P1,power up) ||
ipFDASFlightPhase = 2(P2,taxi out) ||
ipFDASFlightPhase = 3(P3-1, TO 1) ||
ipFDASFlightPhase = 4(P3-2, TO 2) ||
ipFDASFlightPhase = 5(P4, TO 3-ground)}
与此类似的,configuration limit speed(配置限制速度)也由如下表中的飞行配置状态决定。
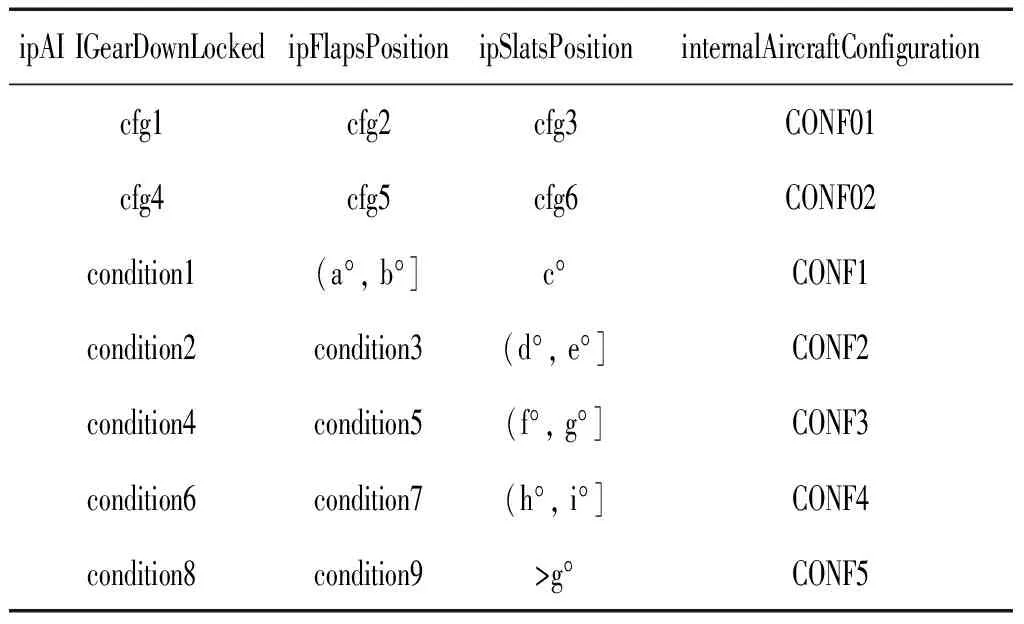
表2 飞行配置状态表
其中,cfg1~cfg6,condition1~condition9,a~g均根据飞机自身构型和所处的阶段计算得出。在CONF01和CONF02时配置限制速度的值如图6所示。
其中,BaroAltitude1和BaroAltitude2分别对应于CONF01和CONF02配置状态时的大气高度值,BaroAltitudeLimit是飞机的最大飞行高度。黑色箭头上方和下方分别对应CONF01和CONF02配置状态。当在CONF01配置状态时,大气高度不大于BaroAltitude1时的配置限制速度为定值CfgSpeed1,当大于BaroAltitude1到BaroAltitudeLimit之间时配置限制速度是随着高度线性变化的。同样在CONF02配置状态时,大气高度不大于BaroAltitude2时的配置限制速度为定值CfgSpeed2,当大于BaroAltitude2到BaroAltitudeLimit之间时配置限制速度是随着高度线性变化的。
MFD上的功能主要由DSLP APP(Display System Logic Pressing Application)来实现,DSLP驻留在IMA处理平台上,DSLP APP提供以下分系统的逻辑处理功能:
1)发动机指示(Engine Indication):为机组提供发动机、燃油、起落架、飞控、液压以及发动机防冰等系统运行必要的参数和系统状态指示。DSLP APP根据预先设计的逻辑来处理显示逻辑,包括数值颜色的变化、单位转换等;
2)驾驶舱告警系统(FDAS, Flight Deck Alerting System):为机组提供有关飞机运行和状态的安全性告警。DSLP APP根据预先设计的逻辑来处理飞机系统的各类包括视觉、听觉和触觉告警。告警等级上高到低分为:警告、戒备和提示。
DSLP APP主要包括两部分的功能模块,I/O接口通讯模块和逻辑处理模块:
3)IO 模块
IO 模块从IMA测试开发处理平台接收AFDX数据,同时把逻辑计算模块的处理结果输出到IMA平台的AFDX 网络;
4)逻辑计算模块
逻辑计算模块从IO模块接收的ADFX数据读取逻辑计算所需数据,然后根据预定逻辑关系进行计算并把结果输出给IO模块。201链路为EICAS画面提供数据输入源,数据信息比较多,所以它的数据包包长为1 518。附录表3对应201链路EICAS部分信息。
表中第一行为网络配置信息,第二行为有效数据载荷,表明链路201传送的EICAS各部分功能对应的具体429状态字信息,对接收的每个429字按照设定的格式结构解析获得对应的状态信息,如相应LABEL号的WING OVERPRES显示的红色告警信息,相应LABEL号的N1 VibesAmberLine的黄色戒备信息以及相应LABEL号的Oil Pressure的白色提示信息。

表3 EICAS部分信息
3.3.2 画面设计
DS仿真器主要包括PFD和MFD的画面的设计,使用presagis公司的VAPS XT工具绘制画面和NCom通讯程序的数据流的处理,重要的三要素是DD文件、MAPPING文件和CONNECTIONS文件,DD文件定义通讯程序和画面之间要数据流传输的变量和数据格式,CONNETCTIONS文件定义通讯通道的通讯方式是share memory 还是UDP/TCP模式,以及通讯服务线程的名称,MAPPING文件定义使用的I/O_buffer共享内存的名称以及要使用的通讯通道的名称。画面设计和数据流做好生成exe可执行文件,使用BAT格式文件关联该exe文件,并按格式列出需要的connections、mappingd等信息,加上VAPS运行必须的库文件,就可以在任何操作系统上运行了。
图8是在开发测试阶段,PFD在运行状态下的部分功能画面的显示,主要展示了飞行的高度、速度、姿态和航向等。
MFD的左边为简图页的画面,中间为EI的画面,右上角为CAS信息。其中EI画面包含有总温、静温、N1、N2、EGT、燃油左右流量、滑油左右油量、温度和油压,N1/N2左右振动值,油箱左中右油量等数值信息,这部分值是经过I/O模块直接转发。CAS信息包括对L ENG OIL PRESS LOW、R ENGINE FIRE等红色告警信息,L FIRE DET FAIL、APU FIRE DET FAIL等黄色戒备信息以及RENG IGNITOR A FAULT、R ENG IGNITOR B FAILT等白色提示信息,画面显示为开发测试阶段,图中的FIRE SYS FAULT是我们在内部测试进行颜色赋值时有意标出的,不是最后设定的告警等级定义库。正式测试时,FIRE SYS FAULT是红色告警信息。
4 测试结果
经过IMA系统仿真试验样件验收测试程序的测试,验证了DS仿真器满足验收测试程序的各项功能和性能要求,通过与OMS等子系统的联调,验证了设备控制逻辑的正确性,飞机发动机、燃油、起落架等自身参数以及飞行状态在MFD和PFD页面指示正确,表明该仿真器满足了该型号民用飞机DS仿真器的试验要求,为后续该型号民用飞机显示真件系统的成功研制打下坚实的基础。
[1] HildermanV,BaghiT.AvionicsCertificaiton:A Complete Guide to DO-178(Software),DO-254(Hardware) [M].American:Avionics Communications Inc.,2007.
[2] ARP 4754A,Guidelines for Development of Civil Aircraft and Systems[S].SAE International,2010.
[3] DO-178B,Software Consideration in Airborne Systems and Equipment Certificaiton[S]. RTCA Incorporated,1992.
[4] DO-254,Design Assurance Guidance for Airborne electronic Hardware[S].RTCA Incorported,2000.
[5] 王文渊,沙海亮.基于增量综合的民机航电系统测试研究与实现[J].测控技术,2013,32(增刊):112-115.
[6] 金德琨,敬忠良,王国庆,等.民用飞机航空电子系统[M].上海:上海交通大学出版社,2011.
Design and Implementation of Display System Simulator for Civil Aircraft
Avionics system simulation platform can support advanced research,schematic design,detailed design and system integration for its flexibility and low cost. It has become an integral design method to the development of avionics system. This paper presents the detailed design and implementation of the display system simulator in the IMA system simulation platform. Firstly the composition of IMA system simulation platform was introduced, and then the composition architecture of display system simulator. This paper gives a detailed introduction of the hardware configuration, avionics network configuration, interactiveinterface and logic processing of display system simulator. Finally, the acceptance test procedure verified the display system simulator by IMA System. The results show the system can satisfy the functional and performance requirements.
civil aircraft;IMA System; display system simulator,avionics network, human-machine interaction
10.19416/j.cnki.1674-9804.2017.02.022
V241
A
沈 佳 男,硕士,工程师,主要研究方向为航电系统测试和综合验证技术;E-mail: shen_jia@careri.com
徐志鑫 男,硕士,工程师,主要研究方向为航电系统测试和综合验证技术;E-mail: xu_zhixin@careri.com
谢 寒 男,学士,主要研究方向为航电系统测试和综合验证技术;E-mail: xie_han@careri.com
谢祥南 男,硕士,主要研究方向为航电系统测试和综合验证技术;E-mail: xie_xiangnan@careri.com
