多传感器数据融合的智能电动车自主导航
2017-09-11叶美松肖世德张志峰王鸿雁
叶美松, 肖世德, 张志峰, 赵 阳, 王鸿雁
(西南交通大学 机械工程学院,四川 成都 610031)
多传感器数据融合的智能电动车自主导航
叶美松, 肖世德, 张志峰, 赵 阳, 王鸿雁
(西南交通大学 机械工程学院,四川 成都 610031)
以四轮驱动电动车为研究对象,将智能电动车上多种传感器所采集的信息进行处理与融合,实现校园环境里的自主行驶与导航。提出了在空旷路段和沿墙导航的控制决策,着重研究了沿墙算法和入弯算法,使智能电动车在不同的环境下可以有效地完成自主导航。实验结果表明:该导航控制策略和算法具有较高的可靠性。
多传感器; 智能电动车; 自主导航
0 引 言
无人驾驶智能电动车从本质上来讲是一种轮式的移动机器人[1],主要依靠智能车自带的计算机系统实现智能车的自主导航和控制。系统主要靠车顶部的视觉传感器、激光测距传感器和车载雷达感知车身周围的环境信息。通过全球定位系统(global positioning system,GPS)、陀螺仪里程计、路标导航等定位方式定位和定向,根据传感器获得的车辆位置和障碍物信息,并将决策传输给车体控制层控制车辆的速度和转向,从而使车辆能够安全可靠地在道路上行驶。
智能电动车实现自主导航任务,涉及到路径的规划、车的自定位、机器视觉、障碍物识别以及多传感器信息的处理与融合技术,处理这些技术难度很大,算法复杂,成本很高。基于此,本文提出了基于校园环境内的无人驾驶电动车的自主导航,通过多个超声波传感器检测车身周围的环境信息,电子罗盘和陀螺仪解决车辆自定位问题,其所用方法较易实现,成本相对比较低廉。
1 智能电动车控制系统
智能电动车的控制系统[2],包括中央处理器模块、运动控制模块、传感器模块三大部分。如图1所示。

图1 智能电动车控制系统结构框图
1.1 中央处理器模块
中央处理器模块用于处理外部传感器所采集的环境信息,并将这些环境信息融合一些算法实现电动车自主行驶。
本文采用的外部传感器主要有超声波传感器、红外传感器、陀螺仪、电子罗盘,计算量相对较小,因此,采用STM32F103VET6控制器,其处理速度满足目前的控制系统要求。该控制器对超声波传感器采集的数据进行处理,并分离出障碍信息,确定智能电动车下一时刻的运动姿态,通过串口将命令发送至下位机。
1.2 运动控制模块
运动控制模块由 STM32F103ZET6 控制器、电机驱动器、直流电机、步进电机组成,其中,STM32F103ZET6运动控制器作为下位机,通过串口与上位机进行数据传输。驱动电机功率为1 kW,由48 V的锂电池供电,智能电动车自重约260 kg,电机驱动功率满足要求,最高时速能达到45 km/h,可以供电2 kW·h,转向电机和刹车电机均由24 V的锂电池供电,实物如图2所示。

图2 电动车实物
1.3 传感器模块
1.3.1 超声波传感器URM37
采用的超声波传感器型号为URM37,用于测量动态或静态目标之间距离,其所采集的数据稳定,误差在1 cm左右,能够满足本文的测距要求。
采用多个超声波传感器采集车身周围的环境信息[3,4],实物如图2所示,传感器总体布局如图3所示。

图3 超声波传感器分布
2#~4#传感器检测前方障碍物的信息;6#,7#,9#,10#传感器用于检测左右两侧障碍物的信息;1#,5#传感器用于确定电动车的入弯点;8#传感器用于倒车时检测后方区域的环境信息。
表1、表2所测得的数据为6#,7#传感器(以下称右前、右后传感器) 距离墙面不同的角度所测得的数据,数据为以位于后面的传感器为中心点转动车的位置时,测得传感器与墙面的距离,所以右后传感器测得的数据变化范围比较小,测这2组的数据的目的是为了获得当车与墙面呈一定角度时传感器所采集的数据的失真率。

表1 距墙48 cm左右不同角度所测距离
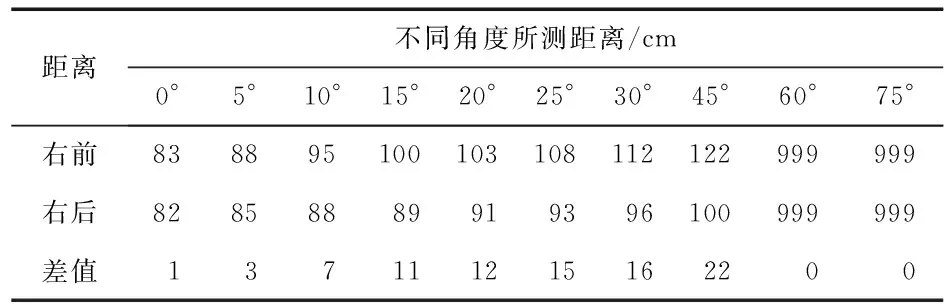
表2 距墙82 cm左右不同角度所测距离
表1和表2数据表明:在传感器与墙面的夹角较大时,所采集的数据失真率较高,比如夹角大于60°时,超声波传感器无法接收回波,导致所采集的数据不可靠;在夹角较小时,所采集的数据是比较可靠的。因此,在夹角较小时,根据2只传感器所采集的数据差可以判断车身相对于墙面的位置。
1.3.2 红外反射传感器
红外反射传感器用于限位传感器和行程开关[5]。模块采用晶体振荡,38 K红外接收,控制距离非常稳定,不怕外界光照影响,因此,在室外可以作为电动车的方向盘零点位置的校准,实物如图4所示。

图4 红外传感器安装位置
由于未安装角度传感器,因此,零点位置的校准变得尤为重要,通过程序对时间长短的控制确定方向盘的转动角度,转动次数增多之后会形成累积误差,可通过对方向盘回正时零点位置的校准消除以保证制电动车转动角度证控的准确性。
1.3.3 电子罗盘和陀螺仪
采用电子罗盘SCM225和陀螺仪MPU6050用来感知电动车的行驶姿态。SCM225测量方位角 0°~360°,可靠性高,测量航向角的误差范围在1°左右,但易受到强磁物质的干扰,因此,安装时选择一个磁干扰最小的地方。
MPU6050在解析航向角的时会产生漂移误差,因此,所测的航向角不可靠,但在转向角度较大、连续变化时,航向角的差值比较准确,在车转弯时可以与电子罗盘配合使用,对航向角起到校准的作用,保证车辆转弯时更加稳定可靠。
2 避障控制算法研究与实现
智能电动车在室外行驶的过程中,如果要精确地按照所规划的路径行驶,必须解决电动车的自定位问题,需要电子罗盘、高精度的GPS、路标导航(CCD图像识别)、地图模型匹配(红外激光扫描)等定位方式[6,7],算法复杂,成本很高,目前阶段,电动车采取漫游式的行走方式。
2.1 自主避障行为
设计电动车在校园内沿马路边缘行驶,将左、右传感器安装于距地面高10 cm左右的位置,以检测到马路的边缘,实现电动车精确的自定位。
在道路环境下,行人比较多,障碍物出现较频繁[8,9],在遇到动态障碍物的情况下,所选择的决策为减速停车,遇到静态障碍物的决策如图5所示。 此外,外界的环境对传感器的干扰因素较多,采用限幅消抖滤波法,对超声波传感器URM37所采集的数据进行滤波,能有效克服因偶然因素引起的脉冲干扰。

图5 静态空旷环境导航决策流程
2.2 沿墙行为
电动车行驶过程中感知到周围存在墙或者面积较大的障碍物时,将触发电动车的沿墙行为[10,11],具体的有以下的3种情况:左侧有墙;右侧有墙;两侧有墙。文中讨论右侧有墙的情况,其他情况与其原理基本相同。实验场地选取学校图书馆前的花坛。如图6所示。

图6 图书馆前方花坛示意图
在超声波传感器感知到右侧有墙时,电动车将根据墙的位置调整行驶姿态,最终实现沿墙行为,图中A-B,C-D,E-F,G-H,4条线段均为直线,因此,处理方法相同。
电动车行驶在A-B路段的时候,传感器检测到A-B路段的距离可以划分为Ⅰ,Ⅱ,Ⅲ,Ⅳ共4个区域,右侧传感器检测到的距离在Ⅰ区域则认为是车离墙太近,属停车区域,也可以认为是一个安全区域,到了这个区域可以停车,根据右侧传感器检测到的数据判断相对于墙的姿态,安全时间判定完毕后调整速度和方向向Ⅱ区域行驶。
Ⅱ区域为电动车离墙比较近的区域,右前和右后任意一只传感器检测到该范围时会向Ⅲ区域靠近。Ⅲ区域为距离比较适中的范围,该区域是电动车调整姿态的区域,实现电动车与墙平行行驶。Ⅳ区域为电动车离墙比较远的区域,右前和右后任意一只传感器检测到该范围时会向Ⅲ区域行驶。
当车身与墙面的夹角比较大时,根据表1和表2数据知道右前和右后2只传感器所采集的数据不可靠,此时,图3中4#传感器与墙面的夹角比较小,所采集的数据较准确,达到4#传感器的限定距离时,控制转向左转,减小车身与墙面的夹角,当夹角逐渐变小时,回到右前和右后传感器的检测范围,从而保证车身相对于墙面无论以何种角度最终都能行驶到Ⅲ区域,沿着墙平行行驶。为下一个行驶阶段B-C做铺垫。这一过程即为电动车直线行驶中方向微调过程。
2.3 智能电动车过弯算法实现
对于电动车过弯的算法考虑的因素比较多,图6中的B-C,D-E,F-G,H-A表示弯道,在电动车进入弯道时,传感器与墙面形成的角度较大,传感器所采集的数据失真,导致系统会出现决策错误,因此,在过弯时沿墙算法并不适用。图6中每个弯道的半径、长度、角度均不同,因此,需要考虑的因素有入弯点、入弯半径、车身回正时间。入弯点即车在进入弯道时什么时机开始转弯,本文中所选择的入弯点为C点,当4#传感器检测不到数据时或者检测的数据大于某个参数值时,判定车进入了弯道区域,前提条件是右前和右后传感器的检测值是在有墙的状态下,此为入弯条件的唯一性。
确定了入弯点后需要确定其入弯半径,即车的转向角度,而文中的4个弯道的半径都比较大,因此,可以选定一个确定的值,最后一个参数为车身的回正时间,利用电子罗盘和陀螺仪可以确定弯前和弯后的转向角度。本文车身需要转90°的弯,在电子罗盘和陀螺仪所测得的航向角为70°时,车就要开始回正。同时,当4#传感器或者右前、右后传感器检测的数据到了指定范围时车也开始回正,这就保证了即使车在转弯角度过大或者速度过快时以及其他特殊的因素,也能够在恰当的时机回正,从而继续正常的行驶,具体的入弯过程的流程如图7所示,现场调试如图8所示。
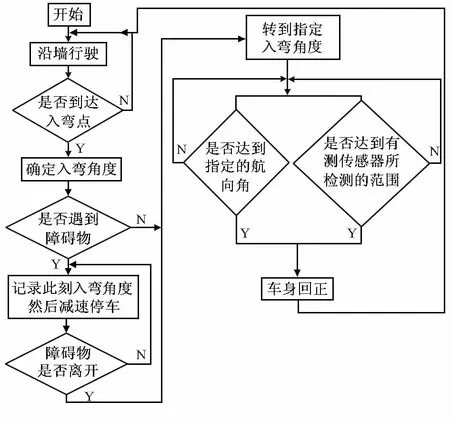
图7 电动车入弯过程流程

图8 电动车现场调试
3 结 论
本文针对无人驾驶的智能电动车在空旷环境下以及沿墙环境下的自主导航系统的研究,提出了沿墙行驶的模糊控制方法和入弯算法,并通过了有效地实验测试,得出了以下的结论:
1)控制方法能够根据沿墙行驶时不同的状态切换行驶速度,实验结果表明:该方法能够很好地根据墙的位置调整电动车的行驶姿态,并且有效地避开前方障碍物,具有良好的实时性和鲁棒性。
2)针对弯道的不同角度、半径,为了保证电动车能够正常过弯,通过对入弯速度、入弯角度以及入弯后的航向角的分析与调试,最终实现了电动车平稳过弯,并再次沿墙行驶,达到了自主行驶的目的。
[1] 李小涛.无人驾驶智能车面向校园场景的自主导航[D].大连:大连理工大学,2011.
[2] 查 峰,肖世德,冯刘中,等.移动机器鼠沿墙导航策略与算法研究[J].计算机工程,2012(6):172-174.
[3] 毛 玲,李振波,张大伟,等.基于红外传感器的移动微机器人定位研究[J].传感器与微系统,2014,33(12):38-41.
[4] 高 峰,郑源明.超声波传感器测量声速和距离实验的研究[J].传感器与微系统,2009,28(11):68-70.
[5] 陈朝大,吕志胜.基于智能寻迹的清洁机器人控制系统[J].机床与液压,2015(21):91-94.
[6] 毛闵军,金 辉,卜弘毅,等.电容位置传感器在激光扫描雷达的应用研究[J].传感器与微系统,2010,29(11):20-22.
[7] 富志凯,邢建春.基于复合控制算法的移动机器人沿墙导航研究[J].计算机应用与软件,2012(9):234-236,277.
[8] 常景娜,高慧斌,乔冠宇.一种基于传感器的测量目标运动参数方法研究[J].传感器与微系统,2015,34(11):19-22.
[9] 沈凤梅.移动机器人的导航与避障系统研究[D].郑州:中原工学院,2014.
[10] 贾蕴发,刘 杨,李 超,等.基于多传感器的汽车防碰撞及行人保护预警设计[J].农业装备与车辆工程,2015(12):56-59.
[11] 陈佳佳.城市环境下无人驾驶车辆决策系统研究[D].合肥:中国科学技术大学,2014.
Autonomous navigation of intelligent electric vehicle of multi-sensor data fusion
YE Mei-song, XIAO Shi-de, ZHANG Zhi-feng, ZHAO Yang, WANG Hong-yan
(School of Mechanical Engineering,Southwest Jiaotong University,Chengdu 610031,China)
Four-wheel drive electric vehicle is research target.The information collected by a variety of sensors in smart car is processed and integrated,the purpose is to complete autonomous travel and navigation in campus environment.Navigation control decision-making in open sections and along wall is put forward,along wall algorithm and bending algorithm is focused on,intelligent electric vehicle can effectively achieve autonomous navigation in different environments.The experimental results show that the navigation control strategy and algorithm have high reliability.
multi-sensor; intelligent electric vehicle; autonomous navigation
10.13873/J.1000—9787(2017)09—0084—04
2016—09—20
TP 242.6
A
1000—9787(2017)09—0084—04
叶美松(1992-),男,硕士研究生,主要研究方向为过程控制。
肖世德(1967-),男,教授,博士研究生导师,主要从事过程控制与运动控制方向研究工作。
