海上试验系统定位点迹外推算法设计
2017-09-09李旭
李旭
摘要:针对海上试验平台位置点迹丢失问题,介绍了一种基于α-β-γ滤波的外推方法,使用导航信号跟踪失锁前序点迹对无效定位时刻坐标进行预测,计算复杂度低,并使用实际采集点迹对算法进行了仿真分析。仿真结果表明,除匀变速运动外,该方法对于缓变加速平台运动同样具有较好的外推结果,具有较高的工程实用价值。
关键词:运动建模;α-β-γ滤波;失锁;点迹外推
中图分类号:TN957.52 文献标识码:A 文章编号:1007-9416(2017)07-0144-02
海上试验船或声源船等平台需要使用卫星定位设备进行实时位置记录,辅助进行定位定向精度分析与评估。船载电台等产生的同频电磁干扰会导致卫星定位设备定位无效,造成点迹定位无效,影响试验效果。本文采用α-β-γ点迹外推解决该问题,平台位移变化近似为匀加速运动模型,可通过前序点迹对模型参数进行预测和估计。
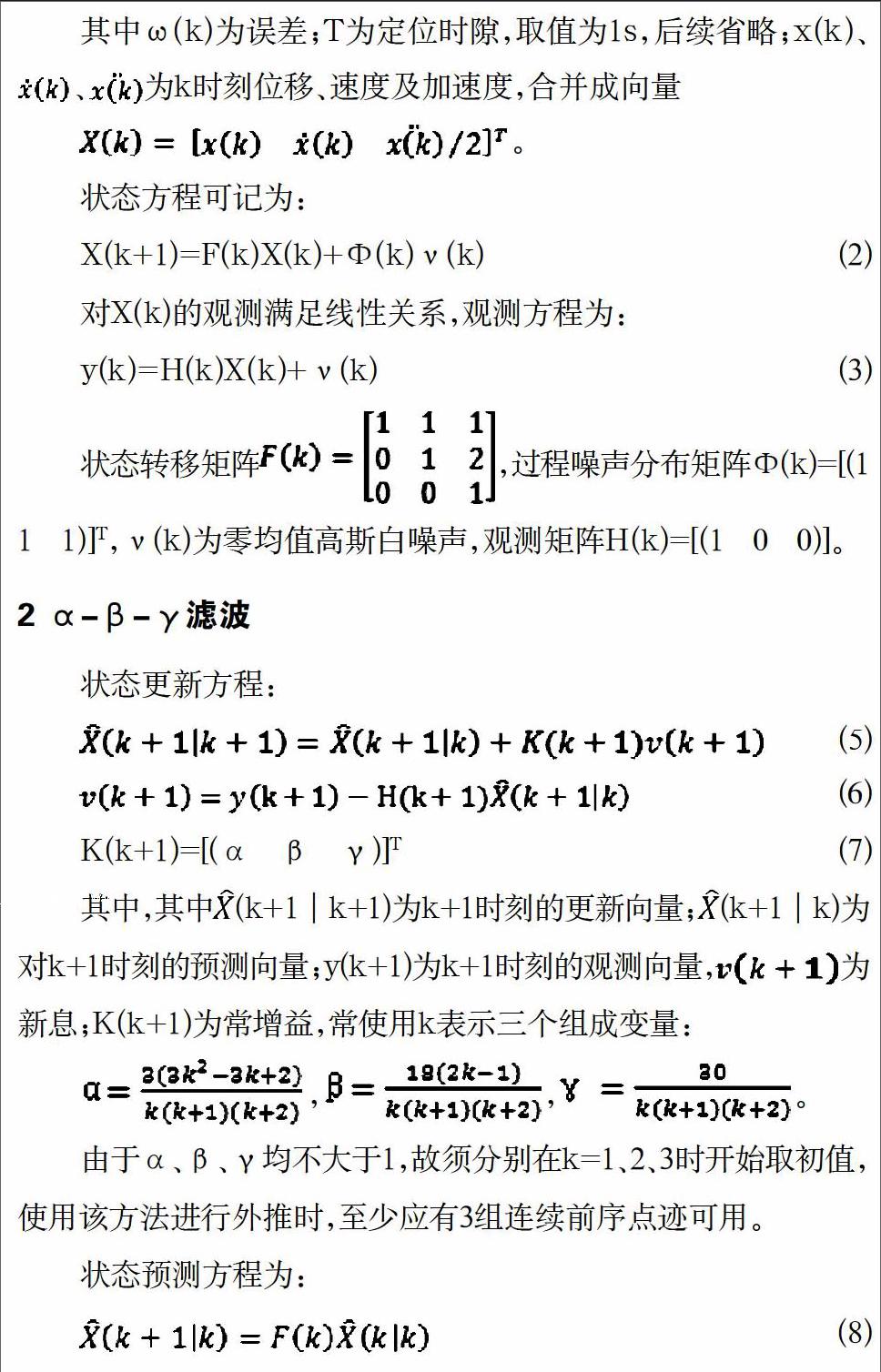
1 平台运动模型
将位置信息转换为空间直角坐标(x,y,z),在三个轴向分别进行相同的运动建模,以下以坐标x为例。根据CA模型,状态变量仅考虑位移、速度和加速度,高阶导数部分作为误差,位移状态方程为:
3 算法流程
算法流程如图1所示。由于试验平台移动速度较慢,且海上无遮挡,定位无效点占比例较小,所以选用的前序点迹FIFO长度较长,取值为10。
4 仿真与分析
选用2016年南海试验实测数据进行仿真,该航次全程无定位无效点,航程5小时,缓变加速运动,最大航速20节,适合算法仿真验证。以45秒为周期,前10秒数据推入点迹FIFO,对后续35秒进行外推,将结果与实际结果进行误差比对,如图2。
全程外推最大误差為7.02m,方差0.61m。经分析,外推误差较大点均因外推开始后航行状态变化产生,在航行平稳时段,外推精度误差2m以内,满足一般海上试验平台对位置精度的要求。
5 结语
该方法对于试验船类海上试验平台的点迹外推具有较高的工程实用价值,在航行平稳时段精度高,非平稳时段同样有较好的适应效果,应用时需根据平台的实际工作情况选用参数,以达到最佳的外推精度。
参考文献
[1]何友.雷达数据处理及应用[M].第2版.北京:电子工业出版社,2009,(8)83-89.
[2]黄鹤,张会生.一种改进的α-β-γ滤波跟踪算法[J].西北工业大学学报,2008,(2):146-151.
[3]陈亮,吴小俊.基于常增益组合滤波器的目标跟踪算法[J].计算机应用与软件,2009,(7):16-17.endprint
