基于建筑结构探测的微传感器设计
2017-09-03林智雄邹文平
林智雄, 邹文平
(福建农林大学 交通与土木工程学院, 福州 350108)
基于建筑结构探测的微传感器设计
林智雄, 邹文平
(福建农林大学 交通与土木工程学院, 福州 350108)

为了改进微光机电系统中加速度集成化差、灵敏度低问题,采用过振保护、稳定性较好固支梁进行加速度传感系统设计。通过环形谐振腔和直波导耦合的方式实现微环谐振腔设计,利用控制波导长度参数实现耦合稳定性、强度等调节。理论分析了实现光强谐振、光放大的过程,固定的固支梁系统,得到了微环谐振腔波长,模型分析得出通过波长变化得到检测微环输出端的光谱变化。传感特性分析表明:微环谐振腔的输出光强谐振峰值高,自由频范围明显小,有利于测量高精度变化量;加速度变化量与输出光谱表现为线性关系,设计的加速度传感系统灵敏度可以达到50 pm/g。
微光机电系统; 固支梁; 谐振腔; 加速度; 微传感器
0 引 言
微光机电系统(Microoptoelectromechanical System,MOEMS)是随着近年来微机电系统(Micro-Electro-Mechanical System,MEMS)快速发展兴起又一特点鲜明的技术架构[1-3]。MOEMS集成了微机械、微纳光学、微纳电子学多个领域的特点构成的结构技术系统,其具备了MEMS相对比较成熟的工艺制作流程[4-5],还将微纳光学中的微纳光器件、光波导、光学谐振腔等整合在了一起,即引入了光学器件的优势[6-7]。在MOEMS发展中传感器技术的应用极为关键,这是由于当前MEMS对传感器的要求越来越高,希望系统中的传感器能够实现超高灵敏度、微纳化、超高精度、高稳定性等特点[8-9]。鉴于上述原因,MOEMS加速度传感器有了较好的研究成果,典型的有微纳光纤的Bragg光栅加速度传感系统,Fabry-Perot(F-P)微谐振腔的加速度传感系统[10-11]。上述2类较为成熟的加速度传感器系统都表现了质量轻、体积小等优势,然而其集成化、灵敏度方面很多时候还不如电子传感器特点鲜明[12-14]。
微环谐振腔是光子学发展中集成化程度较高的一个领域,它主要是将波导、耦合器等元器件集成到同样的基底中,这样形成的微型谐振腔就不再需要腔面,且其品质因数能够实现1万以上[15-16],光学损耗和局域化优势显著,此外微环谐振腔的灵敏度还较高[17-18],这对于特殊环境下的气体传感、微量环境因子(如温度、湿度)传感的应用非常有帮助。最近研究中,比较有代表性的有美国俄亥俄州立大学BipinBhola团队设计的聚合物微环谐振腔传感系统,该团队实现了加速度、压力等参数的测试,加速度传感能够实现31pm/g的高灵敏度。这类加速度传感器目前大都采用的悬臂梁的结构,尽管其灵敏度较高,但研究发现其灵敏度高导致的是偏轴造成的误差大[19,15,13]。基于上述背景,本文采用双端固定的固支梁系统进行加速度传感系统设计,利用的就是双端固定的固支梁结构的过振保护及其稳定性较好的特点。
1 模型理论及其分析
1.1 微环谐振腔光放大和谐振原理
本文设计的微环谐振腔模型采用的是环形谐振腔和直波导耦合的方式,这样可以克服谐振腔点耦合局域化程度弱的问题,如图1所示。图中采用的谐振腔定向耦合的方式,通过控制波导长度的参数实现耦合稳定性、强度等调节。
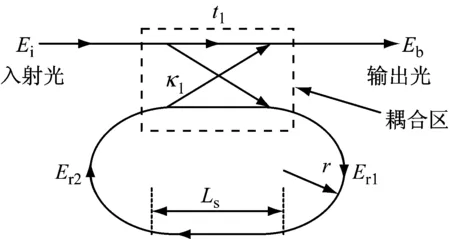
图1 传感理论模型
本文采用从输入端进入入射光,通过一个直波导与环形谐振腔实现定向耦合,即其中一部分光采用倏逝波方式进入了微环谐振腔中,这样能够在谐振腔里实现谐振,还有部分光将直接从直波导输出端输出,
(1)
式中:Ei、Eo、Er1、Er2分别表示输入电场、输出电场、谐振腔右侧电场、谐振腔左侧电场;Leff是微环谐振腔的定向耦合区长度;tr是衰减时间;κr表示耦合区的自耦合系数:
Er2=τr·exp(iβrLt)Er1
(2)
βrLt是微环谐振腔的电场相位变化值,于是会得到:

(3)
这样可以将输出端口传输能量P表示为以下比例关系确定特性:
(4)
当设计的微环谐振腔达到光强谐振条件情况时,其能量归一化表达式可以写为:
(5)
当tr=τr时,输出端口的电场就为0,其数学意义就是光波除了耦合到微环谐振腔就全部被损耗,这就是临界耦合的条件。光波实现了谐振后,设计的微环谐振腔就能发生谐振,完成光放大的过程,这时微环谐振腔的波长可以表示为:
λ=neffLt/m
(6)
通过微环谐振腔周长Lt、有效折射率neff实现调节谐振过程,进而也得到光强和波长的变化量。
1.2 固支梁的加速度传感分析
图2所示为设计的基于微环谐振腔的固支梁型的加速度传感结构图,其中微环谐振腔传感结构集成在固定块m上。当固支梁结构发生加速度变化时,使得固支梁出现形变导致应力的变化,有
(7)
式中:m是质量;a是质量块的加速度。通过固支梁的力学原理有以下应变关系:

(8)
式中,E表示的是固支梁弹性模量。

图2 固支梁型的加速度传感结构
由前面分析可知,固支梁结构发生加速度变化时,会导致固支梁出现形变导致应力的变化,进而可以知道其微环谐振腔也会发生变化,会导致微环输出光强波长出现漂移现象,数学关系如下:

(9)
式中:Δλ、ΔL、Δneff表示的是加速度发生变化情况下的微环谐振腔的相应变化量。进而得到微环谐振腔周长、折射率参数变化与应变的关系:
式中,p11、p12、v分别表示微环谐振腔的弹光系数和采用材料的泊松比。基于图2,图3给出了本文设计具体的结构图,相应地给出了结构有加速度变化时光强变化光谱。从光谱图可知,通过检测微环输出端的光谱变化得到需要检测的加速度参数。
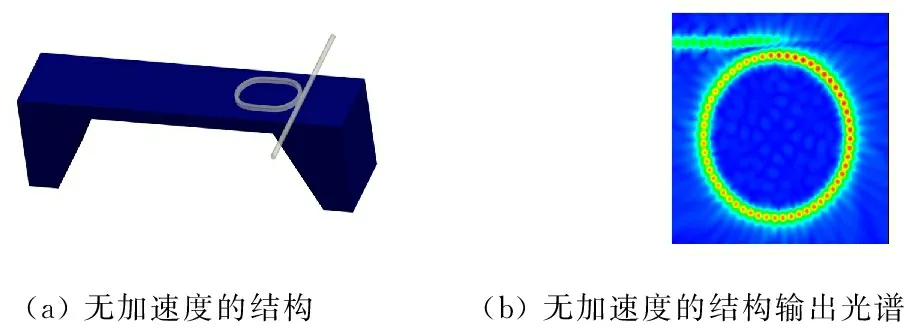
(a)无加速度的结构(b)无加速度的结构输出光谱
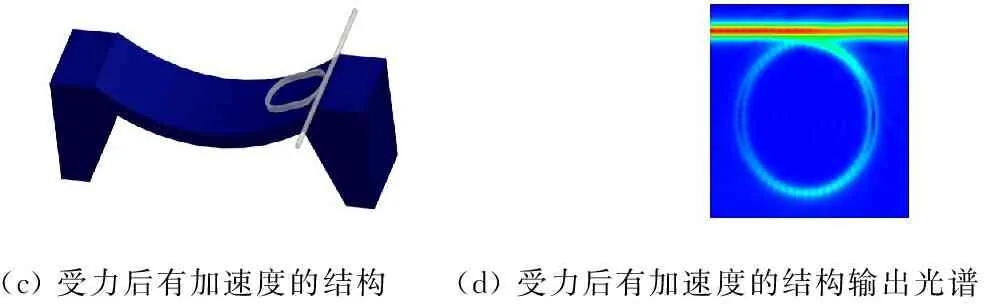
(c)受力后有加速度的结构(d)受力后有加速度的结构输出光谱
图3 设计固支梁的加速度传感系统
2 传感特性分析
2.1 谐振特性分析
采用对比方式分析谐振效果,通过无微环谐振腔和设计模型进行对比。图4对比分析了半径12 μm输出特性,从图中可知微环谐振腔的输出光强明显更大,自由频范围明显更小,且其谐振峰值更高,上述结果有利于测量高精度变化量,验证了微环谐振腔可能实现加速度传感的前提条件。
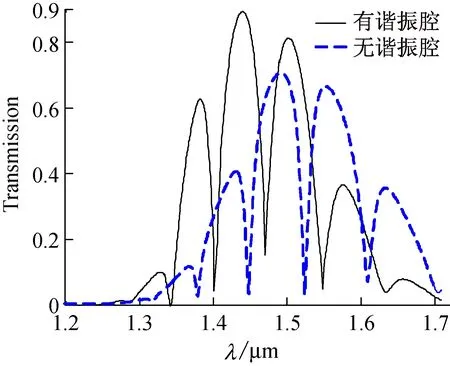
图4 输出光谱对比
2.2 加速度传感特性分析
对加速度传感特性进行分析,采用的数学模型参数如下:入射光波波长1 528~1 533 nm,微环谐振腔半径22 μm,直波导长度4 μm,直波导与环形谐振腔距离250 nm,固支梁的长、宽、高(厚度)参数分别为250 μm、40 μm、4 μm,参数p11、p12则选择为0.140,0.312,参数ν为0.208,E则选择1.9×109。通过波长变化量来测量加速度的变化量,图5给出了0~100g加速度的变化光谱。从图中发现,设计谐振腔加速度传感系统的Q值可以达到1 W以上,光谱只有谐振波长的变化,且当增加20g的加速度变化量时,其输出光谱有0.05 nm变化,即它们之间存在线性关系,如图6所示,进而可以计算出设计的加速度传感系统灵敏度达到50 pm/g。
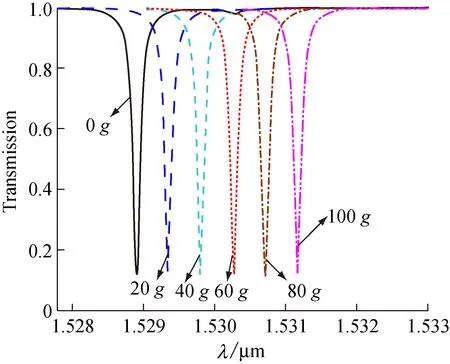
图5 系统在不同加速度条件的输出
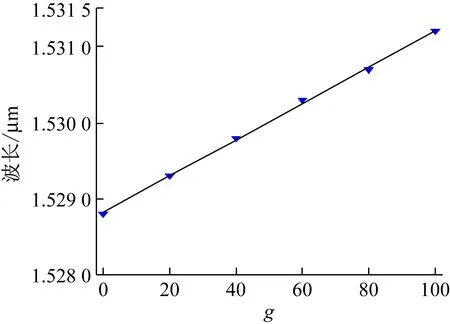
图6 微环谐振腔波长与加速度的拟合关系
3 结 语
文中设计的新型微环谐振腔加速度传感系统,采用固支梁和光学系统结合的MOEMS结构,上述系统具备工业化生产与机电系统应用的条件,且采用光学测量得到加速度的方法,必然适合长距离、特殊环境条件推广,加速度传感器灵敏度具有50 pm/g,这对于高灵敏度、高集成化的微光电系统应用显然具有一定的价值。
[1] 卢秉恒,赵万华,张 俊,等.高速高加速度下的进给系统机电耦合[J].机械工程学报,2013,49(6):2-11.
[2] 于 梅,胡红波,左爱斌,等.新一代冲击加速度国家基准装置的研究与建立[J].振动与冲击,2013,32(10):124-129.
[3] 张 刚,刘品宽,张 波,等.直线电动机精密运动平台轨迹跟踪控制器设计[J].光学精密工程,2013,21(2):371-379.
[4] 刘汉香,许 强,王 龙,等.地震波频率对岩质斜坡加速度动力响应规律的影响[J].岩石力学与工程学报,2014(1):125-133.
[5] 董金玉,杨继红,伍法权,等.顺层岩质边坡加速度响应规律和滑动堵江机制大型振动台试验研究[J].岩石力学与工程学报,2013(z2):3861-3867.
[6] 刘 伟,高维成,李 惠,等.基于有效独立的改进传感器优化布置方法研究[J].振动与冲击,2013,32(6):54-62.
[7] 徐 进,杨 奎,罗 庆,等.公路客车横向加速度实验研究[J].西南交通大学学报,2014(3):536-545.
[8] 曹彤彤,张利斌,费永浩,等.基于Add-drop型微环谐振腔的硅基高速电光调制器设计[J].物理学报,2013(19):260-265.
[9] 骆 亮,李明慧,马可贞,等.SOI微环谐振腔测试信号纹波噪声的分析[J].强激光与粒子束,2015,27(2):108-112.
[10] 朱 君,秦柳丽,傅得立,等.一种石墨烯波导褶皱激发表面等离子体激元的设计[J].光子学报,2016,45(2):40-45.
[11] 韦丽萍,王永华,臧俊斌,等.绝缘体上硅微环谐振腔电光调制器的分析与最优设计[J].光子学报,2013,42(12):1473-1477.
[12] 李 军,沈 祥,王国祥,等.双微环谐振腔耦合的双波长半导体激光器[J].强激光与粒子束,2015,27(8):40-46.
[13] 高 磊,王 涛.基于 Mach-Zehnder结构微环谐振腔全光逻辑门的研究[J].激光技术,2014(5):614-618.
[14] 邓丽莉,石 强,张 辉,等.条形和脊型SOI波导微环结构传感性能研究[J].红外与激光工程,2015(2):752-757.
[15] 唐 军,雷龙海,张 伟,等.Si基双环级联光学谐振腔应变检测研究[J].光谱学与光谱分析,2016,36(3):874-879.
[16] 李艳娜,汤 跃,韦丽萍,等.SOI环形光波导谐振腔双层石墨烯调制器[J].强激光与粒子束,2015,27(2):44-49.
[17] 张 伟,唐 军,刘丽双,等.级联环形谐振腔温漂抑制效应实验研究[J].传感技术学报,2016,29(8):1165-1168.
[18] 李梅凤,王景灏,何 岩,等.基于微环谐振腔产生光频梳的理论研究进展[J].光通信研究,2015(5):38-40,54.
[19] 朱 君,李志全,秦柳丽,等.MIM结构中腔的物理性质对SPP传播的分析[J].红外与激光工程,2015(3):852-856.
Micro Sensor Design Based on Structure Detection
LIN Zhixiong, ZOU Wenping
(Transport and Civil Engineering Institute, Fujian Agriculture and Forestry University, Fuzhou 350108, China)
In order to solve the problems that the acceleration integration of light mechanical and electrical system is poor, and the sensitivity is low, this paper adopts acceleration sensor system design by using vibration protection and good stability of clamped beams. The circular cavity and straight waveguide are coupled to realize the design of micro ring resonator, parameters of length of the waveguide are applied to control stability, strength, etc. The intensity of resonance, optical amplification process, and fixed clamped beam system are analyzed theoretically, the wavelength is obtained; by the model analysis wavelength change of the micro ring resonator is detected. Sensing characteristics analysis shows that the micro ring resonator output light intensity of the resonant peak is high, the free frequency range is obviously small, and the method can measure the precision variation. Acceleration variation has a linear relationship with the output spectrum, the sensitivity of the acceleration sensor system designed can reach 50 pm/g.
light mechanical and electrical system; clamped beam; cavity; micro sensor
2016-11-10
林智雄(1973-),福建浦城人,实验师,从事土木工程结构检测、土木工程物联网应用等研究。
Tel.:13950317658; E-mail:dxiong@163.com
O 433
A
1006-7167(2017)08-0080-03
