养护机械电气故障诊断系统的研究
2017-08-31朱敬花邵珠枫
朱敬花,邵珠枫
(1.九州职业技术学院机电工程系,江苏徐州 221116;2.徐州徐工筑路机械有限公司电气控制研究所,江苏徐州 221000)
养护机械电气故障诊断系统的研究
朱敬花1,邵珠枫2
(1.九州职业技术学院机电工程系,江苏徐州 221116;2.徐州徐工筑路机械有限公司电气控制研究所,江苏徐州 221000)
为了提高养护机械电气系统的性能和可靠性,提出一种基于多传感器信息融合的养护机械电气故障诊断方法,采用多传感器信息融合技术对养护机械电气控制系统进行故障采集和诊断。以综合养护车滚筒热风加热系统为研究对象,将神经网络与专家系统相结合,对其电控系统进行分析,验证了该诊断方法的可靠性,而且实现了养护机械电气控制系统的状态报警和故障诊断。
传感器;养护机械;神经网络;故障诊断
0 引 言
养护机械发生故障时传统的检测方法是使用诊断设备或仪器读取电控单元的各种数据,从而判断设备是否正常工作。这种方法耗时耗力,而且检测结果不够准确。为解决这种弊端,本文提出采用多传感器信息融合技术对养护机械电气控制系统进行故障采集和判断,将传感器采集到的信息数据进行有效的集成与融合,提高养护机械电气控制系统故障的诊断与定位效果。
1 电控系统检测诊断特征参数的选择
养护机械电气控制系统比较复杂,出现电气故障时反映电气故障状态的特征信息多种多样,如果这些信息选择不准确,就不能对电气系统的故障状态进行很好的诊断和定位,因此养护机械电控系统在进行传感器测量时的诊断参数选择非常重要[1]。对于养护机械电控系统而言,主要诊断参数包括电压、电流、速度、流量和温度等[2]。
(1)基于对电控系统特点的分析,优先选用那些有助于尽早发现故障的特征信息。将某一信号作为核心,其他信号作为补充,利用电压和电流稳定信号对电气元件早期的故障进行诊断。
(2)进行电气故障诊断时选取的特征信息与系统状态之间应呈单值的关系。由于电气控制系统中电压波动和功率变化往往呈非线性关系,因此在对电控系统进行故障诊断时应该特别注意故障和特征之间一对多或多对多的情况。
(3)在安装传感器进行故障信号检测时,其安装位置不应改变系统原有的回路结构。
(4)所选的特征信息应便于测量、分析,整个故障监测系统的安装、使用费用应合理。
2 总体结构
基于多传感器信息融合技术的电气控制故障诊断系统,主要由中心处理单元(专用控制器TTC200、TTC60、EPEC3724等)和多个信号采集单元组成。信号采集单元的个数视不同养护机械的结构而定,各单元通过CAN总线进行通讯。信号采集单元将采集到的信息(主要是电压信号、电流信号和动态波形信号)经特征提取后发送给中心处理单元,由中心处理单元对这些信息进行分析处理,以此判断系统是否处于故障状态,并将故障信息以报警信号的形式发出。用户也可随时调用故障诊断模块对养护机械控制系统进行故障分析和定位。系统的总体结构如图1所示[3]。
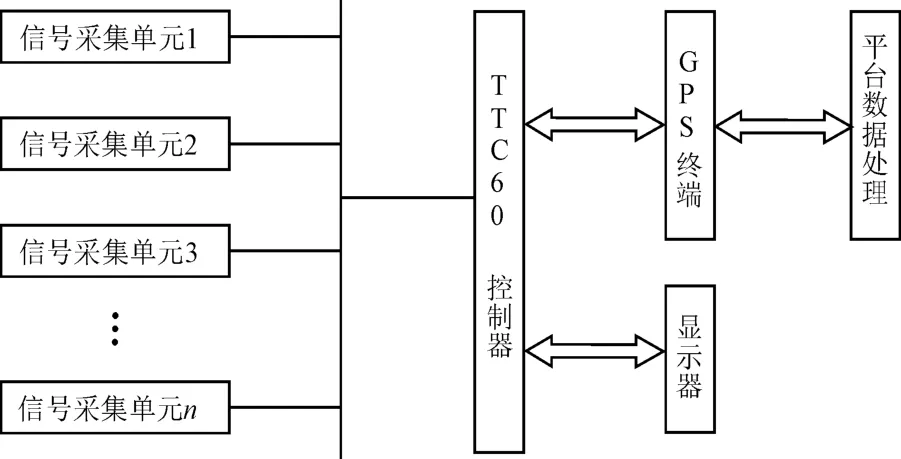
图1 系统总体结构
3 信息融合的类别
养护机械电控系统信息融合的层次可以分为:初级数据信息融合、中级数据信息融合和高级数据信息融合。
(1)初级数据信息融合。初级数据信息融合是在对传感器最初采集到的信息进行预处理之前就对所获信息进行综合与分析。这可以保留大量的原始信息,并通过对这些信息的识别分析来判断电气系统是否处于故障状态。其主要缺点是处理信息时间长、代价高。这种融合是最低层次的融合,由于传感器原始信息具有不确定性、不稳定性,所以要求该层次的融合应有较高的信息纠错能力,而且传感器的种类应该一致。初级融合过程如图2所示[4]。

图2 初级融合过程
(2)中级数据信息融合。中级数据信息融合属于中间层次,它先对养护机械电气控制系统多传感器的原始信息进行预处理和特征提取,然后对特征信息进行综合分析和处理,以便对整车电气故障做出正确的决策。该层次的融合系统实时处理性能好,能最大限度地根据所采集到的信息做出决策,其融合过程如图3所示[5]。

图3 中级融合过程
(3)高级数据信息融合。高级数据信息融合的水平最高,实时性能好,可以从不同角度反应环境信息,对传感器的依赖程度小。当某一传感器出现故障时,养护机械电气系统的传感器系统仍能获得准确信息,具有较好的信息容错性[6],其融合过程如图4所示。
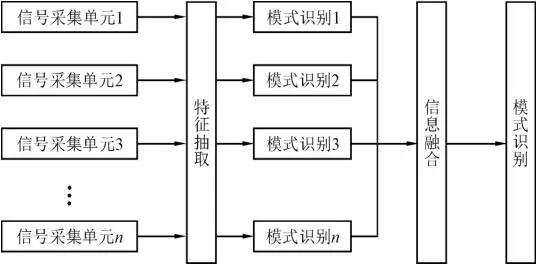
图4 高级融合过程
4 信息融合与故障诊断系统
由于养护机械电气控制系统比较复杂,运行环境多变,因此传感器系统检测到的信息具有很大的不确定性,这使得故障诊断系统检测的信息误差率较高。基于多传感器信息融合技术的养护机械电气系统故障诊断方法,为解决系统的不确定性提供了一条新途径[7]:采用模糊信息融合法,利用融合隶属函数与模糊关系矩阵之间的关系来解决故障与故障发生前的状态之间的不确定关系,进而实现系统故障的检测与诊断。其诊断故障的过程为:养护机械传感器系统采集被测对象的相关信息,再利用这些信息求出各类故障的隶属度值,将隶属度值矢量作为神经网络的输入,神经网络的输出则为信息融合之后的隶属度值矢量,最后对养护机械的故障状态做出决策[8]。
养护机械电气控制系统通过神经网络接受外界输入,对养护故障建立故障库,将故障按不同类别和级别分成不同区域;每个故障点被定义为一个神经元,各故障点在不同故障区域中与邻近的神经元进行交互、竞争,自适应地形成了对输入的不同响应。最后一个故障点优先胜出,那些与获胜神经元有关的各连接权将朝着更有利于竞争的方向调整,通过多路径竞争分析这样的获胜神经元就表示对输入的分类。此外还有一种通过抑制手段获胜的方法,即网络竞争层各神经元都能抑制所有其他神经元对输入的响应机会,从而使自己成为获胜者[9-13]。养护机械电气控制系统故障确定算法为:对于输入X=(X1,X2,X3,…,Xn)T,首先分析确定故障中心神经元Mc,使其满足‖X-Mc‖=min{‖X-Mc‖};然后对以Mc为中心的周围神经元的权向量按下式进行调整。

经过上式分析可以看到,Nc表示由Mc为中心周围的神经元组成的领域,在电气故障判断过程中,开始时Nc可取大些,然后随着判断逐步收缩;在开始判断时系数a(k)可取接近1的常数,然后通过该算法逐步收缩,最后确定电气系统的故障原因并提示解决方案[14-17]。
5 仿真分析
以综合养护车滚筒热风加热系统为研究对象,在滚筒加热常见故障与特征之间建立数据为BP神经网络的故障样本,对数据进行分析判断,然后根据输入的故障特征数据进行诊断。将滚筒热风加热系统3个温度传感器所获得的故障信息送往BP神经网络中心,经过诊断之后,每个传感器可获得4种故障信息,A1表示燃烧器故障,A2表示风机故障,A3表示循环管路故障,A4表示滚筒故障,其基本可信任分配函数值见表1。

表1 三个温度传感器的可信任分配函数值
利用D-S论证法进行分析论证,将传感器1和传感器2所采集到的信息进行融合。概率值K反映了证据间冲突的程度,通过论证可得K=0.686 (故障概率系数),然后得出融合结果,如表2所示。传感器1与传感器2所获信息经神经网络诊断后,对应于故障A1的基本可信任分配函数值分别为0.432和0.512;传感器2采集到的信息经过融合后,对应故障A1的信任度增加到0.607,可知其基本信任度分配明显增大。

表2 传感器1、2的融合结果(可信任分配函数值)
将传感器1和传感器2的融合结果再与传感器3采集到的信息进行融合,K=0.616。以此类推可以得到综合养护车滚筒热风加热系统的融合结果,如表3所示。

表3 三个温度传感器的融合结果(可信任分配函数值)
3个温度传感器的采集信息经融合后,对故障A1的基本可信任分配增加到0.787,由此可以得出系统的故障发生在燃烧器处,这与系统的实际故障吻合。
6 结 语
基于多传感器信息融合的养护机械电气故障诊断系统相比传统故障诊断系统可以获得更准确的诊断结果;针对故障诊断中信息的多样性,包括测试数据的不确定性和特征现象与故障原因之间关系的模糊性,利用BP神经网络和证据理论相结合对多传感器系统信息进行融合,来判断养护机械电气故障状态。由诊断实例可知,诊断结果的可靠性和准确性得到了很大的提高;采用该项故障诊断技术的神经网络与专家系统相结合对电控系统进行分析,实现了养护机械电气控制系统的状态报警和故障诊断,在电气控制等领域中具有一定的应用和推广价值。
[1] 谢 嵘.基于CAN总线的分布式控制系统的研究与实现[D].上海:上海交通大学,2003.
[2] 王丽艳,侯明权.一种多传感器数据融合算法的研究[J].自动化与仪器仪表,2009,31(4):126-128.
[3] 李逢换,孙胜祥.数据融合的故障诊断技术分析[J].鄂州大学学报,2005,12(3):7-11.
[4] 云 俊,陈庆虎,王少梅.人工智能的新发展:人工神经网络及其应用[J].计算机工程及应用学报,200l,37(9):55-56.
[5] 王计生,黄惟公,喻俊馨.小波分析和神经网络技术在故障诊断中的应用[J].振动、测试与诊断,2004,24(1):46-48.
[6] 蔡静之.特征提取在工况监测与故障诊断中的应用[J].重庆大学学报:自然科学版,2003,26(4):93-95.
[7] 王 刚.人工神经网络方法在智能仪表分布式控制系统中的应用[D].南京:东南大学,2003.
[9] 秦永生.刍议工程机械电器的常见故障与诊断维修[J].科技与企业,2014(16):423.
[10] 张治坤,魏殿昌.工程机械电器故障诊断要点[J].工程机械与维修,2005(13):132.
[11] 王正兰,傅香如.工程机械两种常见电气故障的诊断方法[J].工程机械与维修,2014(12):157.
[12] 庄聪聪.机械设备电气系统的故障检测与诊断[J].中国机械, 2015(23):151-152.
[13] 崔 涛.试析机电设备电气回路故障的诊断与处理[J].中国机械,2015(1):107-108.
[14] 荣 彦.隔离试功能法在筑路机械电器故障诊断中的应用[J].筑路机械与施工机械化,2007,24(12):77-80.
[15] 席刚平,黄 健,刘 伟.工程机械的故障检测与维修[J].筑路机械与施工机械化,2009,26(12):82-84.
[16] 张白一,崔尚森.基于Web的汽车故障检测专家系统的设计[J].长安大学学报:自然科学版,2006,26(2):99-102.
[17] 蹇小平,张春化,王向东,等.电控汽油发动机故障模拟试验[J].长安大学学报:自然科学版,2008,28(1):97-102.
[责任编辑:王玉玲]
Research on Electrical Failure Diagnosis System of Maintenance Machinery
ZHU Jing-hua1,SHAO Zhu-feng2
(1.Department of Mechanical and Electrical Engineering,Jiuzhou Polytechnic,Xuzhou 221116,Jiangsu,China; 2.Institute of Electrical Control,Xuzhou Xugong Road Construction Machinery Co.,Ltd., Xuzhou 221000,Jiangsu,China)
In order to improve the performance and reliability of the electrical system of maintenance machinery,a diagnosis method for maintenance machinery was proposed,which applies the multi-sensor information fusion technology to conduct the failure acquisition and diagnosis of the electrical control system.The research on the hot air heating system of the drum was carried out,and the neural network and the expert system were combined to analyze the electronic control system.The reliability of the diagnostic method is verified,and the status alarm and fault diagnosis of the electrical control system of maintenance machinery can be realized.
sensor;maintenance machinery;neural network;failure diagnosis
U418.3
B
1000-033X(2017)07-0097-04
2016-11-30
朱敬花(1986-),女,山东临沂人,硕士,研究方向为机器人技术。
邵珠枫(1984-),男,江苏徐州人,硕士,研究方向为数控智能控制。