基于PI调节占空比的自适应MPPT方法
2017-08-30朱建波张正江朱志亮
朱建波,张正江,朱志亮,吴 平
(温州大学 电气数字化设计技术国家地方联合工程实验室,浙江 温州 325035)
基于PI调节占空比的自适应MPPT方法
朱建波,张正江,朱志亮,吴 平
(温州大学 电气数字化设计技术国家地方联合工程实验室,浙江 温州 325035)
最大功率点跟踪(MPPT)技术是提高光伏发电效率的重要途径之一;扰动观测法是MPPT控制中最常用的方法,针对其无法兼顾跟踪速度与最大功率点跟踪过程的震荡问题,提出了一种基于PI调节占空比的自适应MPPT方法,该方法针对占空比采用基于PI调节的自适应策略;通过Simulink建模仿真,与其他方法进行对比分析,结果显示了该方法可显著地提高了最大功率点跟踪的速度与精度。
光伏发电;最大功率点跟踪;扰动观测法;占空比
0 引言
随着化石燃料的日渐枯竭和生态环境的日益恶化,新能源的开发利用已成普遍趋势,而太阳能作为绿色环保可再生能源,受到了世界各国的高度重视。2015 年,全球光伏新增装机容量超过50 GW,同比增长16.3%,累计装机容量超过230 GW[1]。但是目前光伏发电的光电转换效率低且投入产出比不平衡,故研究一种高效稳定的最大功率点跟踪(MPPT)技术是必需的。
目前,国内外专家学者研究出了多种MPPT控制算法,如恒定电压法、增量电导法、神经网络法、扰动观测法等[2-6]。对于恒定电压法,戴志威等人采用二元线性函数的模型[7],但由于该控制策略是基于最大功率点电压和开路电压是近似的线性关系,存在一定的误差。而Shah提出的增量电导法[8],其对测量传感器精度要求很高,计算量大速度慢,在天气变化频繁时,跟踪时间很长,甚至会出现达不到最大功率点的情况。随着神经网络理论的发展,Elobaid等人建立了双ANN模型,实现对光伏发电系统最大功率点的良好跟踪[9],但是其训练的数据来源于现场设备测量,数据含有测量误差。扰动观测法适应复杂天气环境且易实现,目前得到了普遍的应用,但是由于其步长固定,无法兼顾跟踪速度和在最大功率点处的振荡幅度。徐锋将模糊控制与变步长的方法相结合[10],对传统扰动法进行了优化,但是其隶属度规则复杂,在照度变化时的跟踪速度也不理想。吕川等人则采取了部分步长自适应的方法[11],然而在跟踪时间上仍可有效提升。针对上述情况,本文提出了一种基于PI调节的高效快速算法,并通过Simulink建模分析,与其他方法对比,结果显示了该方法的有效性与可靠性。
1 光伏建模
1.1 光伏电池的等效模型
光伏电池一般由串联和并联形成光伏阵列,通过光—电能量的转换,并网或离网进行供电。其系统模型可以用一个电流源和一个二极管并联组成的物理等效电路模型表示,如图1所示。
输出电流为I,输出电压为V,可得到其简化关系式为:
(1)
其中Isc是光生电流(A);Id是是流过二极管的电流(A);Io是反向饱和电流(暗电流)(A);Rs是串联电阻(Ω);Rsh是并联电阻(Ω);q是电子电荷(1.6×10-9C);k是波尔兹曼常数(1.38×10-23J/K);T是光伏绝对温度(273+实际摄氏温度);n是二极管品质因子。

图1 光伏电池等效模型
1.2 Simulink仿真模型
为了更好地研究光照强度和外界温度等条件变化对光伏阵列的输出功率的作用,在公式(1)的基础上建立了如图2所示的以Boost升压电路为主电路的光伏系统Simulink仿真模型。Subsystem1为光伏阵列模型的封装,而本文的优化算法封装在MPPT模型中。

图2 光伏系统Simulink仿真模型
1.3 光伏发电特性曲线
从公式(1)可发现,其输出特性曲线受外界温度和光照强度影响。
故在1.2的仿真模型的条件下,模拟光照强度为1 000 W/m2,不同光伏温度下时以及模拟光伏温度为25 ℃,不同光照强度下时,输出电压与输出电流关系的U-I曲线和输出功率与输出电压关系的P-V曲线。分别如图3和图4所示。
由图3、图4可见,光伏阵列最大输出功率随温度上升而下降,随光照强度上升而上升。
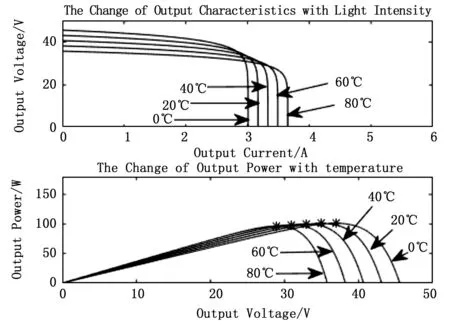
图3 不同光伏温度下U-I及P-V关系曲线

图4 不同光照强度下U-I及P-V关系曲线
2 基于扰动观测法的MPPT算法
2.1 传统扰动观测法
传统的扰动观测法,采取的是固定扰动步长,即通过对输出电压加一个正的或负的扰动±Δ,然后根据当前时刻功率与上一时刻功率的大小,来继续确定扰动方向。可以看出由于扰动的存在,在最大功率点会出现振荡,同时步长的大小将直接影响最大功率点的振幅和跟踪速度。当步长较大时,跟踪速度虽然快,但是在最大功率点附近振荡也随之加大;而步长较小时,虽然最大功率点附近振荡变小,但是跟踪速度会显著下降。
2.2 变步长法
为了优化传统扰动观测法的跟踪时间,有专家提出变步长的方法,即在最大功率点跟踪的初期采用固定的较大步长,而在最大功率点附近则采用固定的较小步长。相比较传统扰动观测法,该方法前期的较长步长使跟踪时间变短,后期较小步长使最大功率点的振荡幅度也有所减小。但这种方法,前期步长仍是半固定的,不能全部自适应,有待优化。
2.3 基于PI调节占空比的方法
虽然上述的变步长扰动法,已经对传统方法进行优化,但是跟踪前期的步长其实还是固定的,不能够随动,故本文提出了更加优化的自适应变步长法,相对于半固定的变步长法,该方法跟踪速度更快,最大功率点输出更稳定。该算法具体流程图如图5所示。

图5 基于PI调节占空比的自适应MPPT方法流程图
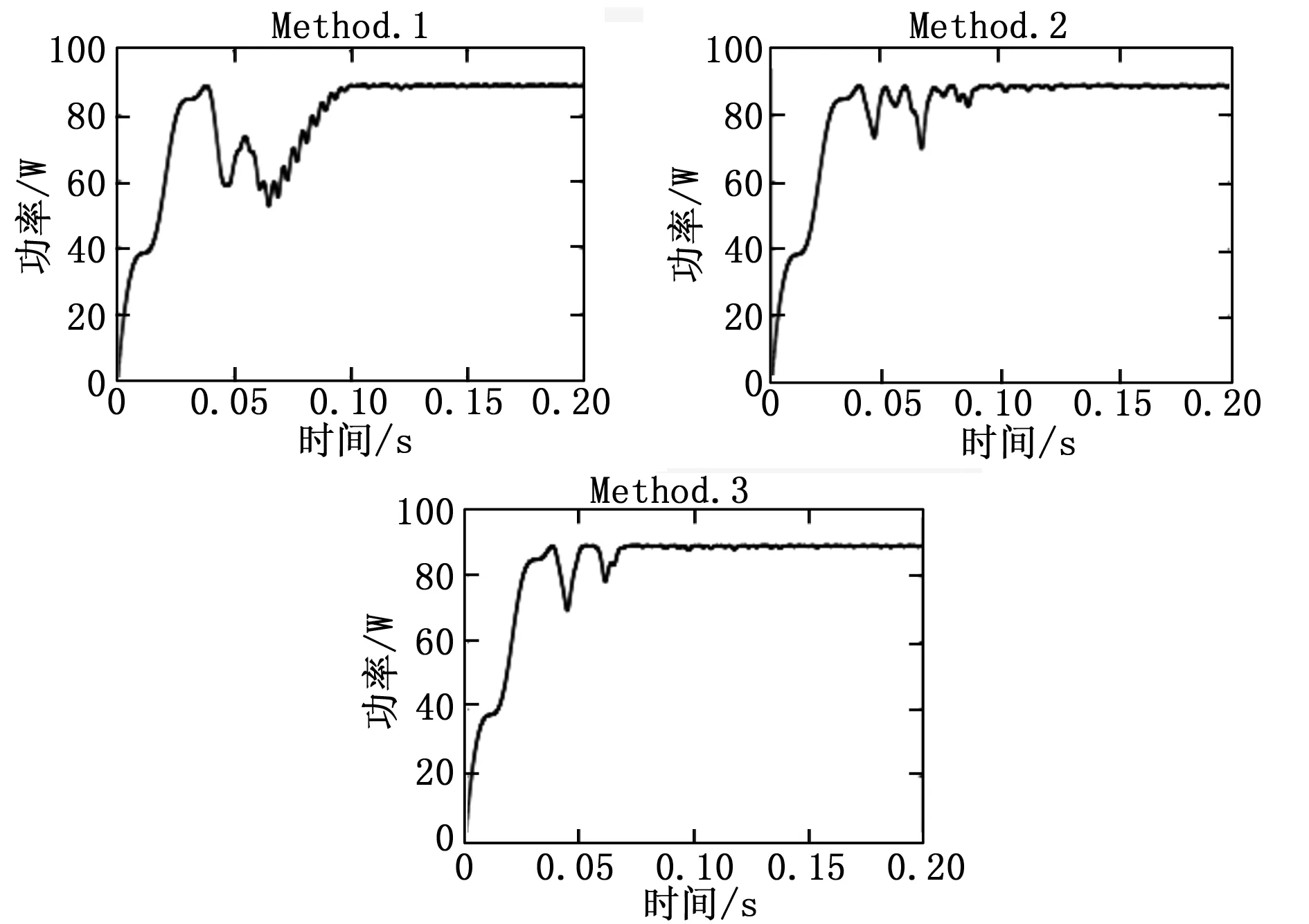
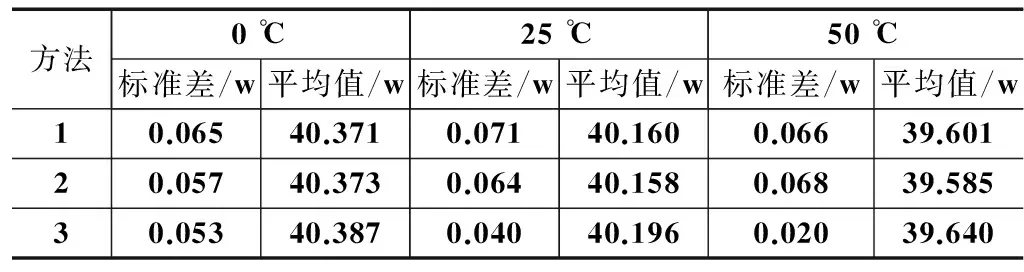
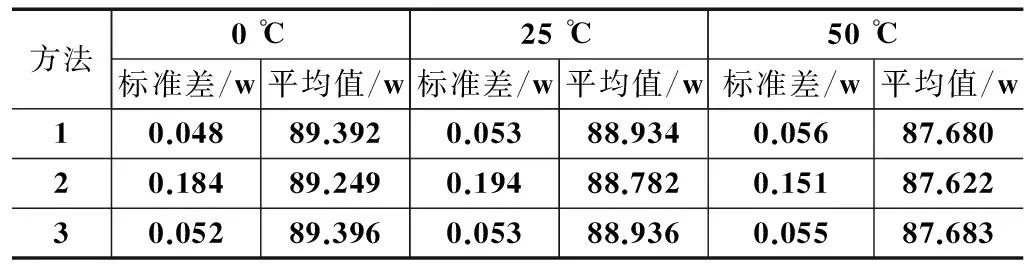
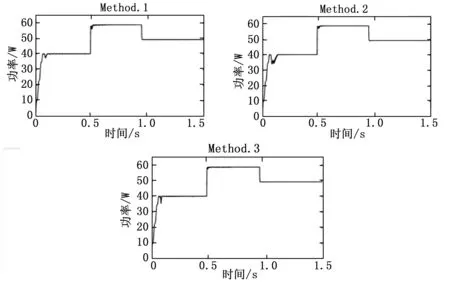
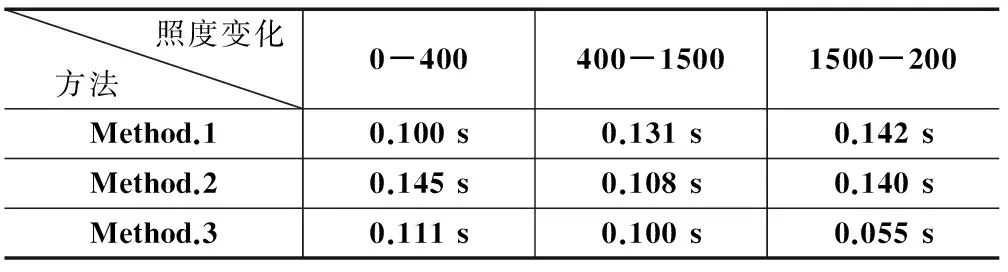
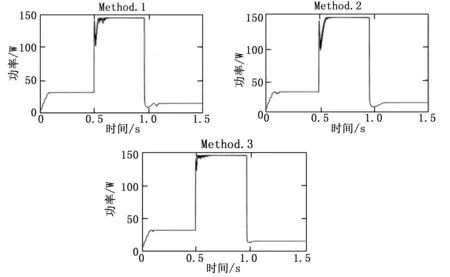
首先初始化给予系统扰动ΔD,然后测量第k时刻电流电压,计算出功率Pk,与k-1时刻功率Pk-1比较。当Pk>Pk-1时,根据图5可知,由于前期功率变化较大,故前期占空比变化也应变大以获得更大的跟踪速度,而在后期为使振幅减小占空比调整应该尽可能小,所以优化算法的占空比将采取基于PI调节自适应变化,具体值取决于当前输出功率和上一时刻的输出功率,自适应占空比变化值ΔD=kp×|Pk-Pk-1|+ki×Pk,这样就可以使前期变化率大的时候占空比变化ΔD也相应变大,同时为避免占空比调整过大造成系统不稳定,还需判断ΔD是否大于阈值上限ε,若大于则ΔD就取上限值ε。在接近最大功率点时,ΔD趋于0,以减小在最大功率点处的振荡。而后再判断Uk和Uk-1的大小,若Uk>Uk-1,则最后输出占空比Dk=Dk-1+ΔD,否则输出占空比Dk=Dk-1-ΔD;而当Pk 其中kp、ki为PI调节的整定值,kp为比例调节,可以加快系统调节速度,但是过大的比例会使系统稳定性下降,ki为积分调节,可以使系统消除稳态误差,但是会使动态响应变慢,故本文经过多次实验兼顾多项指标最终分别取0.01和0.0001;ζ为跟踪后期的占空比变化的固定值,本文取0.0001;ε为自适应占空比变化的最大阈值,本文取0.004;Uk、Ik为当前电压、电流值。 为了验证方法的可靠性,本文将从各种环境下的系统跟踪时间和最大功率点处振幅来对比分析3种扰动法。Method.1为固定步长的传统扰动观测法,取适中步长0.001;Method.2为半固定的变步长扰动法,取前期步长0.001,后期步长0.0001;Method.3为基于PI调节占空比的自适应MPPT方法,kp、ki分别取0.01和0.0001。表格中的测试数据采集样本点为10 000个,测试量振幅为在最大功率点振荡的范围,标准差为最大功率点振荡的标准差,平均值为最大功率点振荡的功率平均值。 3.1 相同温度和照度情况下的跟踪过程 通过Simulink仿真温度为25 ℃,照度为1 000 W/m2情况下得到的时间图对比各方法的跟踪过程。如下图6,依次为传统扰动观测法、变步长扰动法、基于PI调节占空比的自适应MPPT方法。 图6 不同方法跟踪过程对比 由图6可知,传统扰动观测法的跟踪速度最慢,变步长法速度较快,而本文MPPT方法不仅时间更短而且跟踪过程更加平缓。 跟踪时间项数据综合评测优劣:Method.3 > Method.2 > Method.1。 3.2 相同温度和照度情况下的输出功率 输出功率项数据对比以温度0、25、50,照度500、1 000相互组合模拟出共6种外界环境下,3种方法的数据对比。见表1和表2。 表1 500 W/m2时功率对比 表2 1000 W/m2时功率对比 从上述表格中可以看出,本文MPPT方法在各组环境下平均输出功率都是最高,振幅也较小。且当温度越低,光照越弱的情况下,该方法在输出功率这项优势体现的更加明显。 输出功率项数据综合评测结果:Method.3 > Method.1 > Method.2。 3.3 照度平缓变化情况下的数据对比 本项测试模拟的是天气相对稳定时的情况。在温度为25 ℃,照度500到700再到600平缓变化时的仿真如图7所示。表3为其跟踪时间的数据。 表3 平缓天气下的跟踪时间 图7 平缓天气下的对比图 从图7和数据表3中总体来看,在照度平缓变化情况下,3种方法效果相差不大。Method.1在最大功率点处振动稍大,Method.2在环境变化时跟踪时间稍长,Method.3效果稍好。故综合评测结果:Method.3 > Method.2 = Method.1。 3.4 照度急剧变化情况下的数据对比 实际应用中,光照度并不会一直很平缓,如云层突然遮住阳光等情况。故本项测试就模拟的是天气恶劣时的情况。仿真在温度为25 ℃,照度剧烈变化,依次为400到1500再到200的情况下进行,如图8所示。表4为跟踪时间数据测试结果。 表4 恶劣天气下的跟踪时间 图8 恶劣天气下的对比图 从对比图和数据表中可以明显看见,传统扰动观测法在各情况下跟踪时间都最长,半固定变步长在高光照时最大功率点处振幅较大,而变化变步长扰动法在两者之间取长补短,跟踪时间短,最大功率点处振幅小,且在低光照时优势更加明显。故综合评测结果:Method.3 > Method.2 > Method.1。 为了进一步提高光电转换率,本文提出了基于PI调节占空比的自适应MPPT方法,并通过Simulink建模仿真,与其他方法进行对比分析,结果表明基于PI调节的占空比自适应MPPT方法相比较传统扰动法和其他变步长法,具有更短的跟踪时间、在最大功率点更小的振幅、更大的平均输出功率,在各方面数据都占据优势,相应的也就提高了光伏电池的输出效率。由此可以看出该方法对传统方法进行了优化,且效果明显,适应恶劣环境,具有实际应用价值。 [1] 包婧文. 光伏产业:回顾2015 展望2016[J]. 太阳能, 2016(2):79-80. [2] Mutoh N, Inoue T. A Control Method to Charge Series-Connected Ultraelectric Double-Layer Capacitors Suitable for Photovoltaic Generation Systems Combining MPPT Control Method[J]. IEEE Transactions on Industrial Electronics, 2007, 54(1):374-383. [3] Mutoh N, Ohno M, Inoue T. A Method for MPPT Control While Searching for Parameters Corresponding to Weather Conditions for PV Generation Systems[J]. IEEE Transactions on Industrial Electronics, 2006, 53(4):1055-1065. [4] Dorofte C, Borup U, Blaabjerg F. A combined two-method MPPT control scheme for grid-connected photovoltaic systems[A]. European Conference on Power Electronics and Applications[C]. 2005:10. [5] Altas I H, Sharaf A M. A novel maximum power fuzzy logic controller for photovoltaic solar energy systems[J]. Renewable Energy, 2008, 33(3):388-399. [6] Kottas T L, Boutalis Y S, Karlis A D. New Maximum Power Point Tracker for PV Arrays Using Fuzzy Controller in Close Cooperation With Fuzzy Cognitive Networks[J]. IEEE Transactions on Energy Conversion, 2006, 21(3):793-803. [7] 戴志威, 舒 杰, 吴昌宏. 基于环境参数模型的定电压MPPT控制算法研究[J]. 电力电子技术, 2015, 49(5):61-63. [8] Shah K B, Joshi L P. Comparative analysis of incremental conductance base MPPT for multi-string photovoltaic system[A]. Nirma University International Conference on Engineering[C]. 2013:1-6. [9] Elobaid L M, Abdelsalam A K, Zakzouk E E. Artificial neural network based maximum power point tracking technique for PV systems[A]. IECON 2012-, Conference on IEEE Industrial Electronics Society[C]. IEEE, 2012:937-942. [10] 徐 锋. 基于模糊控制和功率预测的变步长扰动观察法在光伏发电系统MPPT控制中的应用[J]. 计算机测量与控制, 2014, 22(2):414-416. [11] 吕 川, 王 斌, 张良力,等. 基于交错Buck变换器的光伏系统MPPT控制[J]. 计算机测量与控制, 2014, 22(12):3964-3966. An Adaptive MPPT Method Based on PI Strategy for Adjusting Duty Ratio Zhu Jianbo, Zhang Zhengjiang, Zhu Zhiliang, Wu Ping (National-Local Joint Engineering Laboratory of Electrical Digital Design Technology,Wenzhou University, Wenzhou 325035, China) The maximum power point tracking (MPPT)technology is one of the important strategies to improve the efficiency of photovoltaic power generation. Perturbation and observation method is one of the most commonly used MPPT control algorithms. However, it has the problems of low tracking speed and the vibration at the maximum power point. To solve those problems, an adaptive MPPT method based on PI strategy for adjusting duty ratio is proposed, which uses PI strategy to adaptively adjust the duty ratio for fast achieving accurate maximum power point. Compared with other methods through Simulink simulation, the results demonstrate that the proposed method can significantly improve the tracking speed and the accuracy of the maximum power point. photovoltaic power generation, MPPT, perturbation and observation method, duty ratio 2016-11-28; 2017-02-06。 国家自然科学基金项目(51207112);浙江省科技计划项目(2015C31157; 2014C31074; 2014C31093);浙江省大学生科技创新活动计划暨新苗人才计划(2015R426059)。 朱建波(1996-),男,浙江宁波人,硕士研究生,主要从事最大功率点跟踪技术方向的研究。 张正江(1982-),男,江西乐平人,讲师,硕士研究生导师,主要从事光伏发电系统建模与控制方向的研究。 1671-4598(2017)07-0194-03 10.16526/j.cnki.11-4762/tp.2017.07.048 TP216 A3 基于PI调节占空比的自适应MPPT方法与常规方法的对比分析

4 总结
