多旋翼无人机高空飞行稳定控制问题分析
2017-08-29张利民张益聂其兵丛恒黄鹏
张利民 张益 聂其兵 丛恒 黄鹏

【摘 要】多旋翼无人机由于它的机械机构较为简单,并且维护和应用比较方便,可以实现垂直起降和快速放飞,在近些年来已经在很多领域得到了广泛的应用和发展。跟微小型的四旋翼无人机相比较,大轴距多旋翼的无人机有着更加优良的载重能力、抗风能力以及续航能力,在工业现场中的应用可以将其价值完好的体现出来。而多旋翼无人机在高空飞行过程当中的稳定控制是目前研究较为广泛的一个问题,本文主要就多旋翼无人机在高空飞行过程中抗风性的问题进行了简要的探讨。
【关键词】多旋翼无人机;高空飞行;稳定控制
1 大气运动对于多旋翼无人机形成的影响
电机桨叶的旋转所形成的气流运动,是多旋翼无人机最为主要的动力来源,不过在大气环境之中,风场的运动会对桨叶所承受的相对气流加以改变,继而影响到旋翼在力跟力矩的输出,对无人机在高空飞行的姿态、速度以及轨迹控制形成影响。
2 多旋翼无人机抗风等级的评估
在对多旋翼无人机加以设计的过程当中,抗风等级是一种比较重要的设计指标,所以应该结合模型,并且应用相应的实验数据对其抗风性加以评估,主要是关于无人机出现在不同的蜂场强度之下能够维持固定姿态和位置所呈现的可控性做出的评估。
为应用模型对抗风等价加以评估,我们把相应的控制率在simulink模型当中加以实施。如图一所示。图中最左面的木块是控制器设计,其输出包括油门、横滚、偏航以及俯仰这几个通道输出,继而利用电机分配的算法将其转化成为八个电机转数所对应的控制量。而最右边的木块则是多旋翼无人机的系统对象,把模型当中之前的风场输入自非线性的模型之中实现引出,继而变更成为能够应用外部向量值而直接得出想要投影至无人机机体坐标系之下的风速。将为之设定值改成[0 0 0],然后将偏航角控制设定于正北的方向之上。而在纵向通道上时,对风速加以逐步增大,对无人机所能够维持的位置所对应的姿态角响应加以记录。
如图二所示,利用不同风速之下所对应的姿态角的配平工作点,计算出能够拟合出的对应风力-姿态曲线。图二当中的横轴表示风力的强度,而纵轴则表示对应的风场强度之下,无人机为了保持位置的单个通道方向所形成的配平抗风姿态角。结合模型所具备的有效性和无人机飞行需要的速度,在控制率的设计时应该把无人机的最大姿态角所对应的设定值限制在二十度以内,多对应的抗风性能就比十五米每秒要大,实现了独一五级风强范围的覆盖。
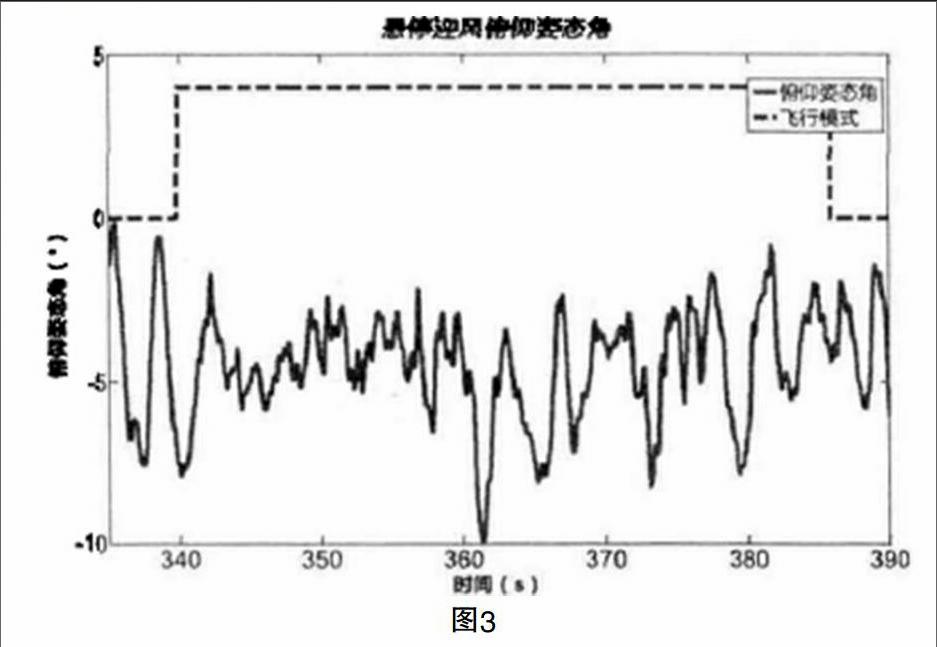
在我国某地区对八旋翼无人机实施悬停抗风实验,用俯仰姿态角迎着风向,这个时候实验人员利用手持形式的风速测量仪对地面的风速加以测量,是七到八米每秒。飞行姿态角的实际数值如图三所示。在实施这个悬停实验的过程当中,飞行器被拉高到了五米的高度后进行悬停,继而防止地面效应的影响。可以在最大程度之上使俯仰通道对着风场的方向,让抗风姿态角可以尽量在俯仰单通道中得以呈现。因为地表所具备的粘滞性,所以与地面接近处的风场所呈现出的变化不够稳定,所以反应出的俯仰姿态角在波动范围上也比较大。不夠利用相关的统计能够得知,在四十秒的悬停时间之内的配平风速所呈现的俯仰姿态角所具备的平均值是4.75度,跟基于模型所得出的风力-姿态取向在计算八米每秒的风速之下相应姿态角五度的数值十分接近,其误差大概在百分之五之内。
经过了多次抗风实验验证,并且将模型所具备的抗风性加以分析可以得出结论,本文中设计的无人机的最大姿态角限幅是二十度的情况之下,可以在十五米每秒的风速当中维持在一定的位置,基本能够达到抗六级风的能力,对需要的指标需求可以加以良好的满足。
3 结束语
本文主要结合一个实验对多旋翼无人机在高空飞行过程中抗风性进行了探讨,实验结果表明所设计的无人机抗风实验中,该多旋翼无人机可以实现对六级风的抵御。
【参考文献】
[1]薛伟霖.四旋翼无人机姿态控制的研究[D].沈阳工业大学,2016.
[2]李诚龙.多旋翼无人机高空飞行稳定控制问题研究[D].浙江大学,2016.
[责任编辑:张涛]