基于Sim u lin k与Tru c ks im联合仿真的多轮独立电驱动客车驱动力控制及分配
2017-08-23张华王健伟重庆大学重庆400044
张华,王健伟(重庆大学,重庆400044)
基于Sim u lin k与Tru c ks im联合仿真的多轮独立电驱动客车驱动力控制及分配
张华,王健伟
(重庆大学,重庆400044)
对六轮电动客车独立驱动系统的驱动力控制及分配策略进行研究,利用Simulink和Trucksim软件搭建联合仿真模型,建立客车速度稳定控制的驱动力输入模型,仿真验证控制算法和分配算法的有效性,
从而实现电动客车分布式驱动。
电动客车;多轮独立驱动;Simulink与Trucksim;联合仿真;控制及分配
近几年来,国内外一些机构和厂家已经开始研究电动客车采用多轮独立电驱动系统。多轮独立电驱动系统驱动力可单独控制,其主要结构特征是将驱动电动机分散布置到各个车轮,传动链短、传动效率高、结构紧凑,车内空间利用率高[1-2]。本文基于直接横摆力矩控制(DYC)理论研究多轮独立电驱动客车在超车和转弯等工况下其DYC的有效性,通过优化算法得到各轮控制需要的力矩,使用Simulink软件进行控制系统的仿真研究[3],将结果与主动前轮转向(AFS)控制和期望模型(DES)的结果进行对比,验证DYC与期望值的差异及DYC相对于AFS的优越性,同时利用Simulink和Trucksim的联合仿真验证控制算法的有效性[4]。
1 六轮客车动力学模型建立
本文研究的多轮独立电驱动客车采用的是三轴的布置形式,六轮客车模型如图1所示。每个轴上使用的是单胎,驱动电机在后面4个轮胎上,这样可以增加客车的过道宽度。

图1 六轮客车动力学模型
在计算过程中假设轮胎侧偏特性处于线性范围,忽略客车运动过程中的侧倾和俯仰运动,只考虑它的侧向和横摆运动,考虑车轮的纵向力与横向力。由于是三轴形式,为了使客车行驶过程中三轴轮胎的转向瞬时中心尽量在一个点,此模型考虑了后轴的随动转向,前轴为主动转向,中间轴为不转向,后轴随着前轴转向产生一定的转向角δs,使得转向过程中车轮的转向中心在同一个瞬时中心,利用几何关系可以得到δf和δs之间的关系为(b2-b1)/tanδs=(a+b1)/tanδf。
通过牛顿第二定理得到模型的平衡方程[5-6],利用该平衡方程推导得到动力学模型的微分方程为:

2 客车运动控制策略及横摆力矩分配计算方法
式(1)可以利用Matlab/Simulink搭建模型进行仿真计算。由该式子得知,只要知道客车的相关参数,输入计算所需的速度、车轮转向角和控制所需的横摆力矩,就可以求得客车运动过程中的质心侧偏角β和横摆角速度γ。计算方法如图2所示,具体的控制过程如下所述[7]。

图2 直接横摆力矩计算控制模型
计算过程主要分为前馈计算和反馈计算。前馈计算主要是将车轮转向角乘上前馈增益得到,前馈增益计算方法主要是为了控制车辆的质心侧偏角β保持不变,为了达到这个目的,控制输入即直接横摆力矩与前轮转向角δf和后轴转向角δs之间的关系假设为Mff(s)=Gffδf(s)+Gfsδs(s),其中Gff和Gfs为前馈增益,对式(1)的微分方程进行拉普拉斯变换可以得到质心侧偏角β和横摆角速度γ的响应。令质心侧偏角β的响应为0可以得到两个前馈增益,最终得到的前馈转矩如式(2)所示。

式中:kyd(v)和τyd(v)分别是横摆角速度γ响应下的稳态增益和时间常数。期望模型主要是通过期望质心侧偏角β得到的横摆角速度γ响应,是一个二阶系统,为了减轻控制的复杂度设计,将其近似认为是一阶系统从而得到的微分方程,计算X与Xd之间的误差,误差项求导后将公式的后两项看作是由车轮转角引起的干扰项,令干扰项为0,则通过优化计算可以得到反馈力矩:
殷明不想看着这个似乎居高临下的时间的代表,他关掉手机。想想,又打开了,翻到那条存留许久的短信:“明,我走了。以后也别再找我了,咱们就此别过吧,祝你找到理想的工作。再见!”

由于该文研究的客车驱动电机放置于4个后轮上,所以式(4)计算得到的横摆力矩需要通过一定的方式分配到4个驱动电机,从而驱动并控制客车的运动。
轮胎力的分配要在满足横摆力矩控制、电机驱动能力限制和路面附着要求的前提下,根据车辆的运动状态进行实时优化,使得分配得到各轮的纵向力/力矩施加到驱动车轮的驱动电机上,从而控制客车的稳定性。现在比较有代表意义的典型力矩分配方法有:路面附着消耗率最小的分配方法、驱动系统效率最高的分配方法和前后轮同时达到附着极限的分配方法。由于每个车轮所需要的驱动力会受到路面条件、整车纵向加速度、电机的可输出转矩和纵向力与侧向力之间的关系等限制,所以需要设计四轮驱动分配策略。根据车轮模型,轮胎力需满足摩擦圆的关系,因此车轮纵向力与车轮横向力的合力不能超过地面所能提供的最大摩擦力。又因为驱动电机的功率问题,各个车轮的驱动力Fxi不能超过电机所能提供的最大力矩,因此各个驱动轮的驱动力限制为[8-9]:

式中:i表示4个驱动车轮之一;Fzi为该车轮所受的垂直力;Fvi为该车轮所受的横向力;Tim为对应的电机所能提供的最大扭矩。
一般认为,地面提供的最大轮胎纵向力与轮胎垂直力成正比,所以为了防止轮胎打滑,轮胎的纵向力需要按照轴载比例进行分配。由达朗贝尔原理可知,客车各个车轮的轮胎纵向力需要满足式(6)。

3 仿真分析
3.1 六轮客车模型仿真计算
根据图2的控制模型在Simulink中搭建出六轮客车动力学仿真模型,通过动力学理论建立vehicle模型。该模型用于计算得到只考虑侧向和横摆情况下运动的质心侧偏角β和横摆角速度γ。期望模型用于计算质心侧偏角β和横摆角速度γ的期望值,计算得到控制需要的横摆力矩。该仿真模型的输入控制变量为客车的轮胎转向角,车辆模型参数如下:质量m=18 000 kg,整车绕Z轴转动惯量IZ=69 386 kg·m2,前轴距a=3.5 m,后轴距b1=2 m,后轴距b2=3.2 m,轮胎半径r=0.52 m,前轮侧偏刚度kf=6 954 764 N/rad,后轮侧偏刚度kr1=5 280 477 N/ rad,后轮侧偏刚度kr0=5 280 477 N/rad。模拟的工况为移线仿真和J型仿真,输出控制变量为质心侧偏角β和横摆角速度γ。
移线(换道)仿真工况假设的是,客车以50 km/h在匀速行驶一段时间后给前轮输入一个幅值为4°、周期为5 s的正弦,模拟车辆在换道时前轮转角的变化。J型仿真工况假设的是,客车在弯道上以50 km/h在匀速行驶一段时间后给前轮输入一个幅值为4°的阶跃信号,模拟客车弯道行驶时前轮转角的变化。仿真过程中分别计算主动前轮转向(AFS)、直接横摆力矩控制(DYC)和期望模型(DES)的质心侧偏角β和横摆角速度γ,计算直接横摆力矩控制得到的总横摆力矩。

图3 前轮转角输入曲线

图4 质心侧偏角曲线

图5 横摆角速度曲线
3.2 Simulink和Trucksim联合仿真
通过Simulink计算并优化后得到的横摆力矩需要进行验证。由于实车验证比较困难,因此利用Trucksim软件来模拟验证。用Simulink与Trucksim联合仿真,将理论计算模型中的二自由度改成多自由度的Trucksim车辆模型,通过Simulink优化分配得到的各轮横摆力矩作为Trucksim的输入,Trucksim计算得到的质心侧偏角β和横摆角速度γ反馈回Simulink作为输入参数,从而可以验证计算得到的横摆力矩的有效性,并利用两者联合仿真有效地控制客车的运动状态。Simulink和Trucksim联合仿真模型如图6所示。

图6 Simulink和Trucksim联合仿真模型
1)客车驱动力控制。在联合仿真之前,需要为客车提供驱动力和转向角等参数,所以与之前六轮客车模型不同的是联合仿真需要一个驾驶输入模型,驱动力控制主要是为了实现速度在一定的控制范围内,速度控制模块的两个输入端分别是期望速度vd和Trucksim反馈的真实速度vr,两个速度之间的误差为△v=vd-vr,利用误差值修正得到客车行驶的驱动力F,在△v与F之间存在一个函数关系式f(x),使得F=f(x)△v(10)
式(10)中的f(x)可由期望速度和客车最大驱动力等参数得到,在Simulink中搭建自定义函数fcn实现该函数。利用递增函数或者递减函数关系控制驱动力的增加或者减少,从而计算得到的F可以有效地实现客车加速到期望速度后保持匀速行驶,以更加有效地模拟实际情况中驾驶员的意图。
在联合仿真中,式(4)得到的横摆力矩与式(10)得到的驱动力一起叠加在客车驱动轮上。该客车的驱动轮是位于后面4个轮胎上。通过Trucksim的输入框将4个扭矩施加作为客车的驱动力。
2)联合仿真工况。如前所述的六轮客车模型一样,联合仿真采用的工况也是移线模拟和J型模拟。由于实车控制中主要是为了实现之前所述的DYC控制理论的有效性,因此在联合仿真中主要比较客车受DYC控制和未受控制状态下质心侧偏角β和横摆角速度γ的异同。
联合仿真中为客车施加驱动力,使得客车速度从静止加速到50 km/h后匀速行驶,在客车保持匀速行驶的过程中进行移线和J型的仿真模拟,通过Trucksim得到的质心侧偏角β和横摆角速度γ参数来验证控制理论的有效性。联合仿真得到的结果如图7~图9所示。
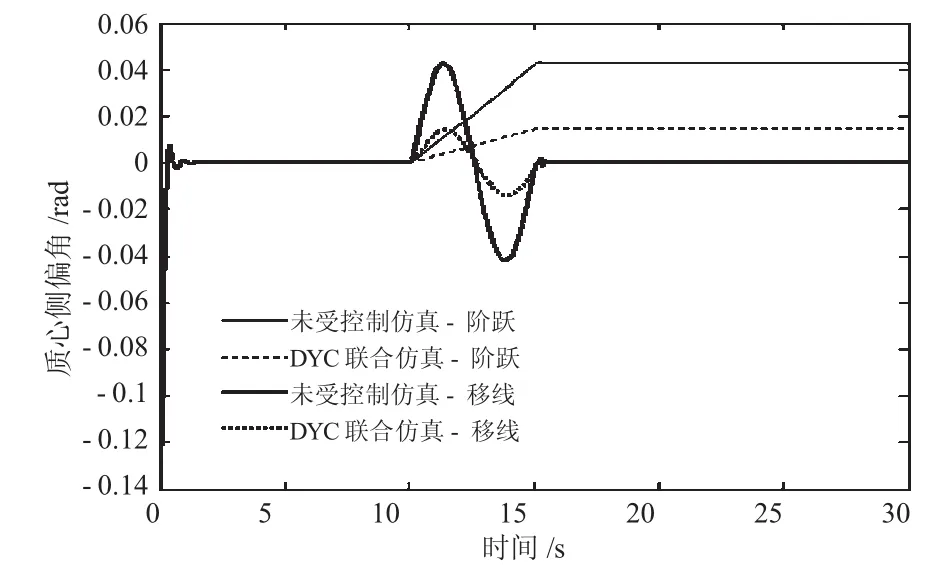
图7 质心侧偏角曲线

图8 横摆角速度曲线

图9 优化分配驱动轮各轮扭矩曲线
4 结束语
本文研究了六轮客车的多轮独立电驱动系统,以质心侧偏角β和横摆角速度γ为控制目标制定直接横摆力矩控制策略和横摆力矩的分配方法。采用Trucksim和Simulink联合仿真对控制策略及分配方法进行了仿真模拟。仿真结果表明,利用DYC控制的质心侧偏角β和横摆角速度γ比未受控制状态下的值小,说明利用DYC控制客车的质心侧偏角β和横摆角速度γ对于实车实验仿真是有效的。
[1]余卓平,冯源,熊璐.分布式驱动电动汽车动力学控制发展现状综述[J].机械工程学报,2013(8):105-114.
[2]李斌花,王地川,钟勇.纯电动车电机驱动控制系统现状与发展趋势[J].客车技术与研究,2005,27(1):5-6.
[3]靳立强,王庆年,宋传学.四轮独立驱动电动汽车动力学控制系统仿真[J].吉林大学学报(工学版),2004(4):547-553.
[4]熊璐,陈晨,冯源.基于Carsim/Simulink联合仿真的分布式驱动电动汽车建模[J].系统仿真学报,2014(5):1143-1148.
[5]Shino M,Nagai M.Yaw-moment control of electric vehicle for improving handling and stability[J].JSAE Review,2001,22(4):473-480.
[6]余卓平,高晓杰,张立军.用于车辆稳定性控制的直接横摆力矩及车轮变滑移率联合控制研究[J].汽车工程,2006(9):844-848.
[7]Shino M.Independentwheeltorque controlofsmall-scale electric vehicle for handling and stability im provement[J].JSAE Review,2003,24(4):449-456.
[8]邹广才,罗禹贡,李克强.四轮独立电驱动车辆全轮纵向力优化分配方法[J].清华大学学报(自然科学版),2009(5):111 -115.
[9]余卓平,姜炜,张立军.四轮轮毂电机驱动电动汽车扭矩分配控制[J].同济大学学报(自然科学版),2008(8):1115-1119.
[10]张聪.基于线控4WS和DYC的客车操纵稳定性控制策略研究[D].秦皇岛:燕山大学,2013.
[11]赵云.四驱轮毂电机电动汽车稳定性控制研究[D].长春:吉林大学,2015.
修改稿日期:2017-02-06
Controland Distribution of Drive Force for M ulti-wheel Independent Electric Bus Based on Co-simulation w ith Simulink and Trucksim
Zhang Hua,Wang Jianwei
(Chongqing University,Chongqing 400044,China)
The authors study the drive force controland distribution strategy of the six-wheelelectric bus independentdrive system.They build a co-simulation modelwith Simulink and Trucksim softwares,and establish the drive force input model on the speed-stability control to simulate and verify the validity of the control algorithm and the distribution algorithm,and realize the distributed drive of the electric bus.
electric bus;multi-wheelindependentdrive;Simulink and Trucksim;co-simulation;controland distribution
U469.72;U464.142+.1
A
1006-3331(2017)04-0001-04
张华(1962-),男,博士;副教授;研究方向为客车动力学控制。