基于智能控制的植树机器人研究
2017-08-22张鹏飞吴震银良良
张鹏飞+吴震+银良良

摘 要 随着科学技术的发展,越来越多的智能装备开始走入我们生产生活的各个领域。本文提供了一种基于智能控制的植树机器人的设计思路,综合利用单片机、PLC控制、传感器、车辆设计等技术,实现了机器人挖坑、送苗、培土、浇水等作业过程的一体化,大大提高了植树作业的自动化及效率。
关键词 植树作业;智能控制;自动化
中图分类号 TP3 文献标识码 A 文章编号 1674-6708(2017)191-0042-02
1 研究背景
近年来,我国提出了绿色发展理念,而植树造林就是工作重点之一。据我国2014年发布的第八次全国森林资源清查结果显示,全国森林覆盖面积为2.08亿公顷,森林覆盖率为21.63%,远低于世界31%的平均水平,人均森林面积仅为世界平均水平1/4[1]。因此,要实现我国森林资源建设的总体目标,机械化植树造林是必由之路。
国外研究机构在植树设备的研究领域尽管已达到了较高的水平,但是所设计开发的设备结构复杂,成本偏高,且部分功能还需进一步完善。国内对这一领域的研究较晚,基本上以打坑机和挖坑机为主,功能单一,自动化水平较低,如3WH-60型悬挂式挖坑机、3WS-2.8型手提式挖坑机[2]。本文基于以上问题,提供了一种基于智能控制的植树机器人的设计思路。
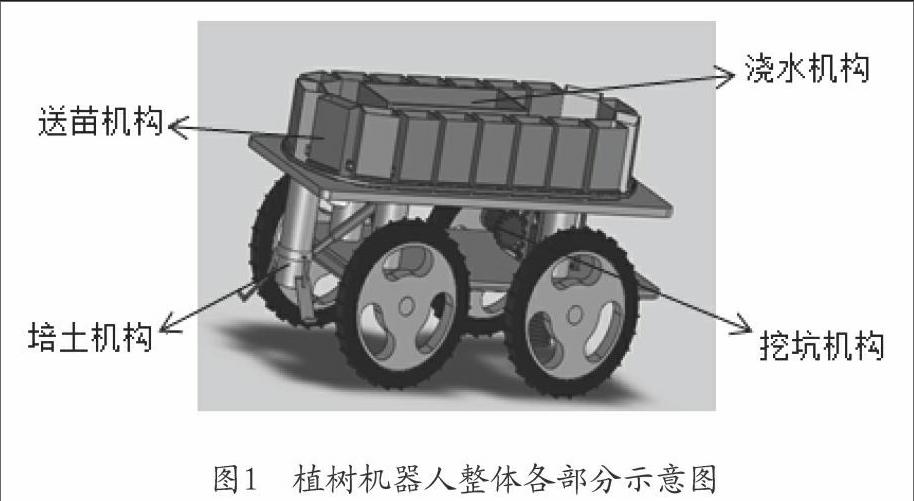
2 产品结构及工作原理
该设备由驱动系统、智能控制系统、挖坑机构、送苗机构、培土机构、浇水机构组成。其中驱动系统由全数字控制的四轮直流伺服电机组成,负责机器人在作业过程中的行走驱动;挖坑机构采用螺旋式钻头,便于松土和向周围抛洒;送苗机构采用专用创新设计,巧妙地运用外槽轮间歇运动的特点,完成树苗的输送;培土机构连接于送苗筒下部表面处,培土时培土钢片呈倾斜状态,能高效地完成聚拢拍土的动作;浇水机构通过控制水阀开启与关闭,完成浇水作业。
2.1 智能控制系统
该系统综合采用单片机、PLC控制技术,负责对小车的行走驱动以及挖坑、送苗、培土、浇水等过程的控制。且该部分安装了蓝牙接收模块,可以用手机App实现远程操控、作业参数的动态调整等[3]。
2.2 挖坑机构
该机构由螺旋钻头、连接杆、永磁无刷直流电动机、升降齿条、齿轮(与齿条啮合)、稳定架等组成。
螺旋钻头和直流电机通过连接杆螺栓连接,直流电机与蓄电池连接,把化学能转化为机械能,通过连接杆把机械能传递给螺旋钻头。稳定架和直流电机通过螺栓连接,升降齿条和稳定架焊接在一块。PLC控制直流电机的运动来控制钻头的运动,包括控制直流电机的启动、停止和正反向运动,从而控制稳定架和钻头的竖直运动,完成向下挖坑和提升钻头。
2.3 送苗机构
如图2所示,机构由直流电动机、外槽轮、盛苗器(底部为空)、铰链、导轨、送苗管、小轮、拨动杆等组成。
送苗机构由直流电动机提供动力。位于工作台上的盛苗器之间铰链连接,小轮装在盛苗器与导轨的外边缘之间。在送苗过程中,控制系统控制直流电动机转动,从而带动外槽轮转动,外槽轮拨动盛苗器上的拨动杆使盛苗器向前滑动至送苗管的上方,树苗由于重力便会缓慢落入送苗管中,最终完成送苗动作。
2.4 培土机构
该机构主要由培土钢片、连接杆、套圈、送苗管、气动传动杆、气缸和气泵组成。套圈套在送苗管外表面,可以沿送苗管轴向移动。培土片与送苗管铰链连接,同时连接杆铰链连接套圈和培土片。气动传动杆与套圈之间为铰链连接。送苗结束后,控制系统通过控制气动装置中的电磁阀来控制气缸的运转,带动传动杆的运动,然后通过铰链控制套圈、传动杆及培土片的运动。电磁阀可通过控制气缸的正反向运动来实现培土片的上下往复运动,从而完成培土过程中的反复拍土,提高培土质量。
2.5 浇水机构
浇水机构主要由水箱、水管、开关阀、PLC控制模块组成。培土过程结束后,PLC控制开关阀的关闭进而完成浇水作业。在这个工作过程中,控制系统会根据不同种类树苗所需水量的不同来控制浇水时间,完成差异化作业。
3 产品的工作过程
产品的工作过程包括前期准备和工作行程两部分。前期准备主要包括盛苗器装苗和浇水水箱的储水过程。当这两个过程完成后,启动机器人的智能控制模块,机器人便开始按照单片机控制程序沿着既定路线进行树苗的自动栽培。工作行程包括挖坑、送苗、培土、浇水4个部分。首先挖坑机构控制螺旋转头完成挖坑动作及提升钻头,这一过程中控制系统会根据不同树苗的生存条件设定不同的树苗栽种间距;然后驱动系统控制机器人移动,使送苗管对准挖好的树坑,接下来控制系统控制机器人完成送苗、培土、浇水作业。工作行程中,使用者可以通过手机App把作业信息传输给机器人的蓝牙接收模块,智能控制系统会对接收的信息进行处理,最终实现植树作业过程的动态调整。
4 结论
本文设计的一种基于智能控制的植树机器人采用全新自主设计的送苗和培土机构,具有高度的功能集成化和作业自动化的特点,且工作过程中可以动态调整工作参数,可用于代替繁重的人工劳动或条件艰苦的工作环境,具有广阔的应用前景。但该机器人也存在设计不足之处,比如缺少樹苗往盛苗器中自动填装的装置和水箱(浇水机构)的自动装水设备,这也是今后该机器人研究改进的方向。
参考文献
[1]刘建平.我国森林资源现状及林业可持续发展探析[J].黑龙江科学,2015,6(3):64.
[2]于建国,屈锦卫.国内外挖坑机的研究现状及发展趋势[J].新疆农机化,2007(1):45-46.
[3]赵荣,张伟强.PLC在工业自动化控制中的应用[J].科技信息(科学教研),2013(17):30-31.
