电磁力滤波与快速反射镜光学补偿在潜航器光轴稳定控制中的应用∗
2017-08-12刘宗凯薄煜明王军崔珂
刘宗凯 薄煜明 王军 崔珂
(南京理工大学,先进发射协同创新中心,南京210094)
电磁力滤波与快速反射镜光学补偿在潜航器光轴稳定控制中的应用∗
刘宗凯 薄煜明†王军 崔珂
(南京理工大学,先进发射协同创新中心,南京210094)
(2016年10月20日收到;2017年1月19日收到修改稿)
搭载在潜航器上的光电桅杆是光电跟瞄的重要装置.当潜航器在水下高速行进时,海水会在物体表面形成脱体边界层和涡街,涡街的生成和脱体会引起阻力和升力的大幅度波动,从而对光轴稳定性产生极大的扰动.本文首先基于电磁场和流体力学的基本控制方程,通过层次结构网格下的有限体积法探讨了电磁流体表面控制对潜航器绕流流场的影响和消涡减振效果;其次,分析并获得了快速反射镜(fast steering Mirror,FSM)的结构特性、传递函数和PID控制策略;最后,以潜航器光路模型为研究背景,结合电磁流体的滤波特性和FSM的传递函数,论证了复合控制对潜载光电跟瞄系统稳定性提高的效果.结果表明,壁面流向电磁力能很好地调控潜航器绕流边界层,抑制涡激振动、减少光学系统的输入噪声,在此基础上通过FSM实现二次补偿,可以进一步提高光学系统跟踪的精度.本研究是电磁流体控制在光电领域的探索,也是对传统流体力学实验方法的拓展,因此具有一定的科学意义和实用价值.
电磁流体控制,快速反射镜,消涡减振,光轴稳定控制
1 引言
光电桅杆是以计算机为控制核心的高级光电成像与自动跟踪控制系统,也是光电系统现代化的突出代表.它是水下潜航器实现目视观察、测距、照相、导航、激光通信、激光打击、光学跟踪等多种功能的设备.由于桅杆搭载在潜航器之上,当潜航器在水下高速行进时,海水会在航行器和桅杆表面形成脱体边界层.当雷诺数较大时海水可能从物体表面某处脱体,形成涡街.涡街形成的同时伴随着阻力和升力的大幅度波动,从而引起振动.对于更高雷诺数的流体则会形成湍流,相对于层流来说,湍流具有更强的随机性,从而使流场结构与受力特性变得更为复杂.先前科研人员也对水下潜航器绕流做了大量的研究.A lin等[1,2]采用大涡模拟的方法研究了SUBOFF全附体模型和类潜航器模型(DARPA-2 SUBOFF)的绕流,分析了交叉流分离、马蹄涡的产生和周围的流场涡结构,并探究了潜航器涡激振动的来源.K im等[3]计算了DARPA SUBOFF裸艇体、裸艇体加围壳和裸艇体加尾舵三种模型在小偏航角时的流体动力学和力矩的演变特征.Jimenez等[4,5]对用于潜水艇和鱼雷的回转体模型DARPA SUBOFF在雷诺数为1.1×106—6.7×107条件下的尾流场演变特征做了一些实验研究,以此来探索雷诺数对潜航器下游流场的影响,进而实现潜航器的稳定.
当潜航器在水下航行的时候,来流的扰动会反映在艇身受力变化以及潜载光电系统的跟踪视窗的抖动之上.由于不同来流攻角、雷诺数以及潜航器外形的差别,会使扰动具有更多的高频小扰动和尖锐的噪声,如图1所示,这些在后期光学补偿中很难抑制(主要是由于:尖锐的噪声会超出控制系统的范围从而引起数据丢包;高频小扰动会超过控制系统的带宽).鉴于此,需要在光学补偿的前端添加相应的滤波控制来抑制这种噪声的出现.
针对上述问题本文研究了电磁流体控制和快速反射镜(FSM)补偿这种复合控制策略的可行性.潜航器光电桅杆模型及光轴稳定控制原理如图2所示,远处的平行光经过光学透镜入射进入光电桅杆,光路经FSM调整之后映射在成像CCD上.
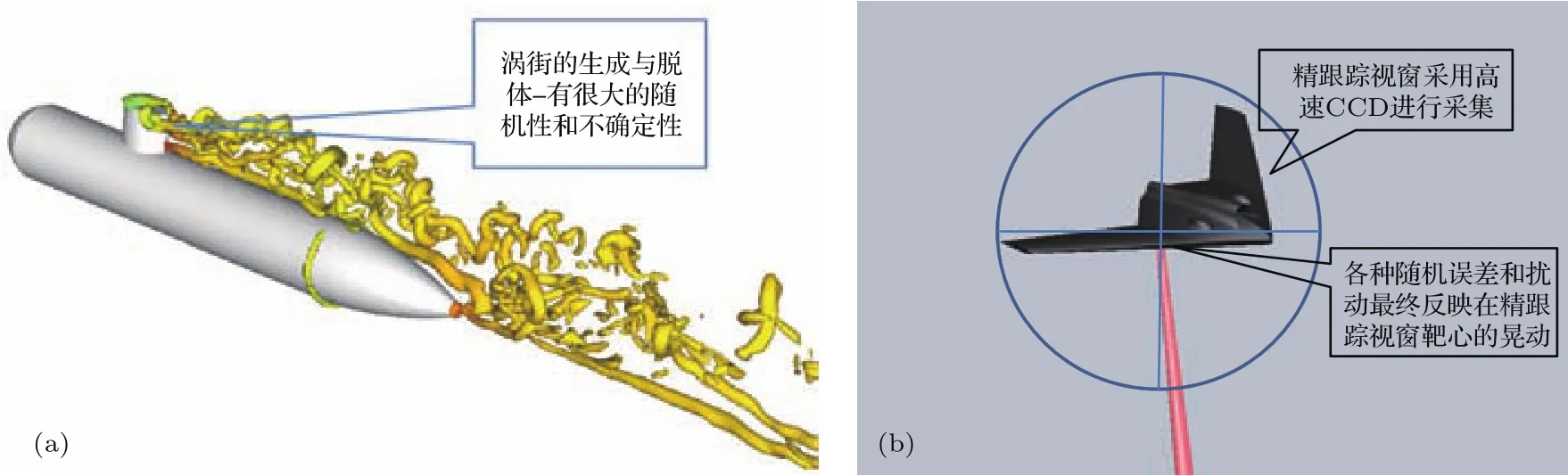
图1 潜航器涡激振动对光轴稳定的影响Fig.1.The in fl uence of vortex induced vib ration on the op tical axis stability.
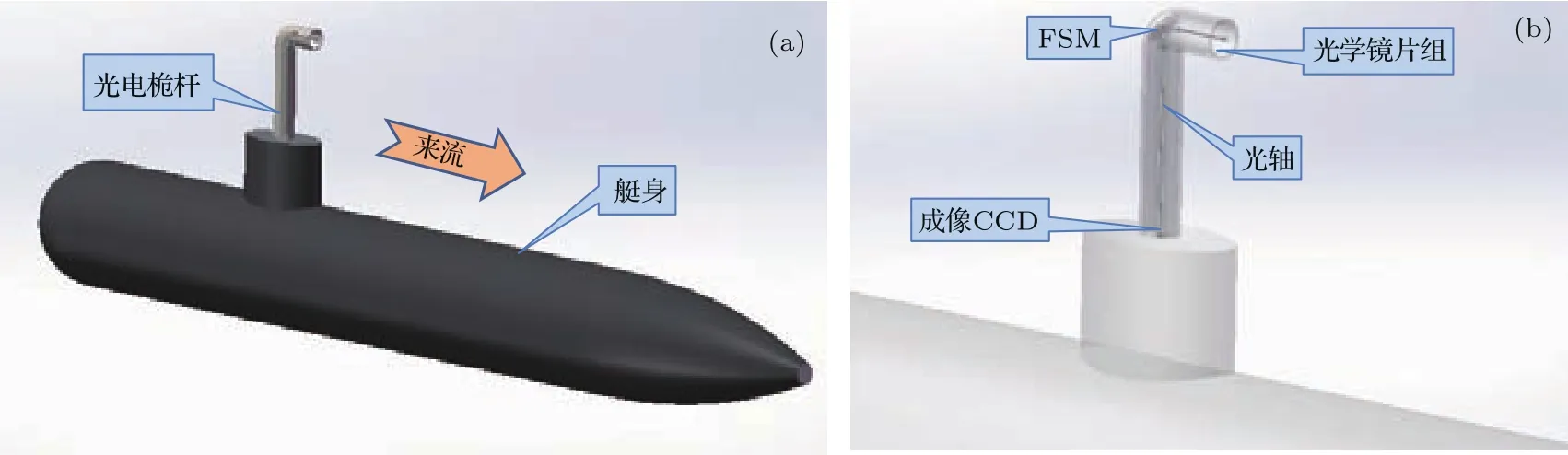
图2 潜载光电桅杆模型及光轴稳定控制原理图Fig.2.The p rincip le diagraMof photoelectricMast and optical axis stability control.
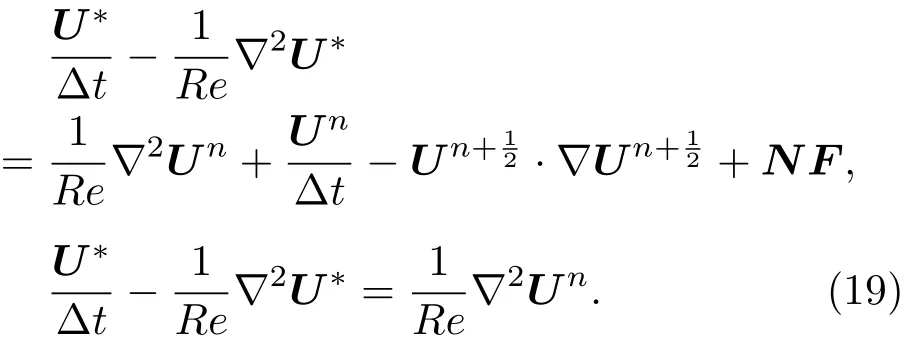
电磁流体推进的基本原理为:浸入弱导电流体(海水、等离子体等)中的物体,由于其周围诱导磁场和电场比较微弱,必须施加外加电场和磁场才能使其在近壁面激发出一种沿法向迅速衰减,且能直接反映体积分布特征的电磁体积力.据电磁学弗莱明左手定律,导电流体在相互垂直的电场和磁场中受到电磁力的作用.本文所研究的电磁流体控制是一种静态的作用方式,它在推进的同时也能在一定程度上实现对周围流场的调控[6,7].在此前的实验中将电极、磁极条带平行排布于受控物体表面,进而能激励出沿条带方向的电磁力.这种方法不改变受控物体的外形,具有良好的表面适应力.图3为排布上电磁激活板的潜载光电桅杆模型示意图,图中黄色的是铜电极,与其相邻的是磁极,这样便能激励出沿轴向(流向)的电磁力,由于光电桅杆较整个艇身的尺寸小很多,因此其扰动主要是由艇身振动所引起,数值建模时忽略了桅杆.

图3 包裹电磁激活板的潜航器Fig.3.The underwater vehicle covered w ith electroMagnetic actuator.
先前,在流体力学领域人们广泛开展了以消涡、减阻、减振为目的的电磁流动控制[8,9].在光轴稳定控制方面,除了滤除光学系统的噪声,对于带宽较窄,幅值较小的扰动往往需要在跟瞄随动系统内采用自适应光学构架来进一步弥补这些扰动所带来的瞄准线晃动问题.快速反射镜[10,11]是一种工作于光源与接收器之间的用于调整和稳定光路的重要组成部件.由于反射镜转动惯量小,响应频率高,因此可以做出更高、更快的响应,这样就可以显著提高跟瞄系统的精度,增强其抗扰动能力和稳定跟踪能力.
本文探讨了均匀来流、雷诺数Re=107条件下,不同强度的流向电磁力对潜航器绕流流场的形态和受力的影响,进一步揭示诱发潜航器及光电桅杆振动与制约光电跟瞄系统精度的因素和内在机理.同时,根据现有的FSM和数理模型构建了FSM的闭环传递函数,并通过MATLAB Simulink工具箱对PID闭环控制下的快速反射镜二次补偿进行了仿真.
2 基本模型与数值方法
2.1 基本模型
如图4所示,潜航器由半球形的前体、圆柱形的中体和平滑锥形的后体组成,其长度分别为0.06l,0.69l和0.25l(l为潜航器的长度,即特征长度,具体尺寸如图4所示).围壳为高0.06l的椭圆柱,其长短半轴分别为0.045l和0.025l,并与裸艇体相贯于距前缘0.3l处(以椭圆柱中心轴计算).由于算法采用流体体积的思想来解析物体边界,所以不能解析小于网格尺度的物体(如带尖角的部分),因此将模型前后滞点处修改为圆形截面,圆的半径为0.0125l,这种修改对流场影响较小.
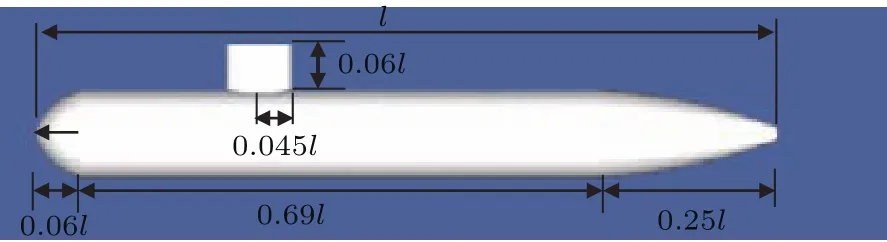
图4 潜航器尺度模型Fig.4.The underwater vehicle Model w ith scale.
如图5所示,计算区域大小为4l×2l×2l,来流沿潜航器轴向自左向右,右手坐标系的原点位于墙体潜航器的首端点,x轴指向下游,y轴指向右舷,z轴垂直向上.潜航器的首端点(即坐标原点)位于入口下游0.5l处.左、右面分别为速度入口和压力出口,其余四个侧面为压力边界条件,即压力为固定值、法向速度梯度为零,以消除边界的堵塞效应,潜航器表面为无滑移边界条件.图5中的纵中剖面为此时根据局部涡量自适应而生成的八叉树网格.最小的网格长度为l/29,总网格数约为2300000.
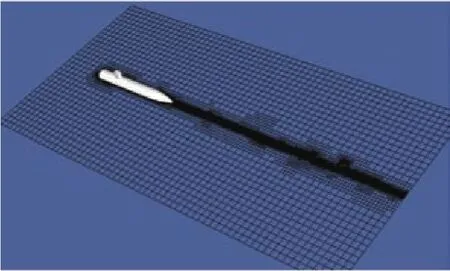
图5 潜航器流场的计算区域与计算网格Fig.5.The fl ow field area and coMpu tational grids.
2.2 基本的控制方程、网格划分和求解方法
无量纲形式的电磁流体控制方程可以写为:
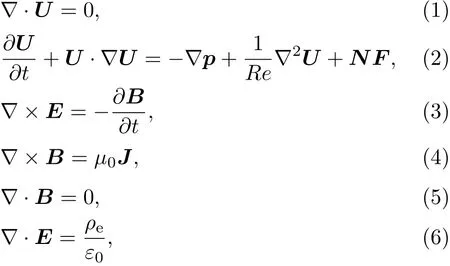
其中U=(u,v,w)和p分别为流体的速度和压力;雷诺数Re=u∞l/ν,u∞为来流速度,ν为流体运动学黏性系数;无量纲时间t=t′u∞/l,其中t′为计算时间;µ0是磁导率;ρe是电荷密度;ε0是介电常数.F为无量纲电磁力可以由边界层中的磁感应强度B和电流密度J表示为

j0和B0分别为电流密度特征值和磁场强度特征值.电流密度可以用欧姆定律表示为

E为流体边界层中的电场,σ是流体的电导率.
计算区域的空间离散通过将正方体有限体积离散成分层组织的八叉树结构[12,13].速度、压力和电磁力源项被定义在单元体中心,表示与该单元对应的体积平均值.以图6所示二维四叉树离散为例,定义每个有限体积为单元(cell),每个单元是四个子单元(children)的父单元(parent).根单元(root cell)是树结构的基础,而叶单元(leaf cell)是没有子单元的单元.单元的层(level)定义如下:从根单元即零层开始,每增加一组紧挨着的后继子单元,层数就增加一层.每个单元的每个方向上(二维时为4个,三维时有6个)在同一层上都通过单元的某个面而连接.定义被嵌入的固体边界切断的单元为混合单元(Mixed cells).图6中虚线和箭头表示网格遍历的顺序.
为简化单元边界上的计算、保证网格大小的平滑过渡,单元边界须满足一些约束条件,如图7所示,虚线为单元须满足的约束条件,分别为:图7(a)相邻单元间的层数之差不能大于1;图7(b)对角相邻单元间的层数之差不能大于1;图7(c)混合单元的相邻单元的层数须相同.
计算程序仅在叶单元网格被调用.为了在特定的部分区域(例如图7中的灰色阴影区域)执行计算程序,给每个叶单元引入一个标示符以确定该单元是否属于选定的区域.如图7右侧所示,只有实线相连的分支点被遍历.图7中的斜线区域为引入的虚拟单元,虚拟单元用另一个标示符标记并可以被独立地遍历,用以指定边界条件.
时间离散采用二阶时间交错离散的分数步投影法[14].这种投影法依靠速度场的Hodge分解,

其中U∗为临时速度场,在计算区域Ω内,U满足∇·U=0,在边界上有U·n=0.对(9)式两边求散度得到下面的泊松方程:

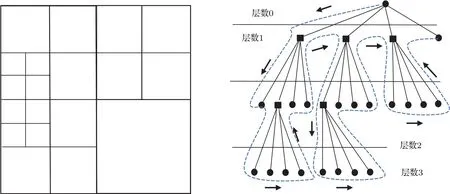
图6 四叉树离散及其对应的树结构示意图(虚线表示网格遍历顺序)Fig.6.The diagraMof quad tree d iscrete and corresponding tree structure(the grid traversal sequence denoted w ith dotted line).
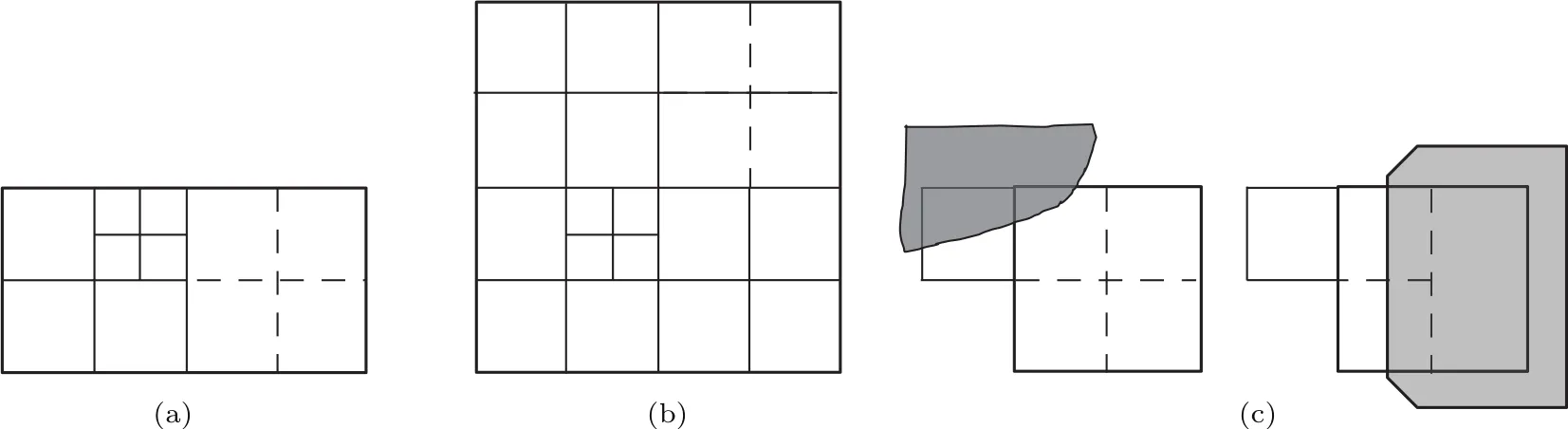
图7 四叉树离散的约束条件Fig.7.The constraint cond itions of quad tree d iscrete.
它在边界上的定义是

由此,无散速度场可以定义为

方程(12)定义了一个从速度场U∗到无散速度场U的一个投影算子,其中φ可以通过求解泊松方程(10)得到.投影算子的离散形式依赖于相应压力场的速度场的离散位置.在单元面中心的对流速度采用精确投影法;而在最终的单元体中心的速度采用近似投影法.
于是,在给定时间步n,控制方程离散为:
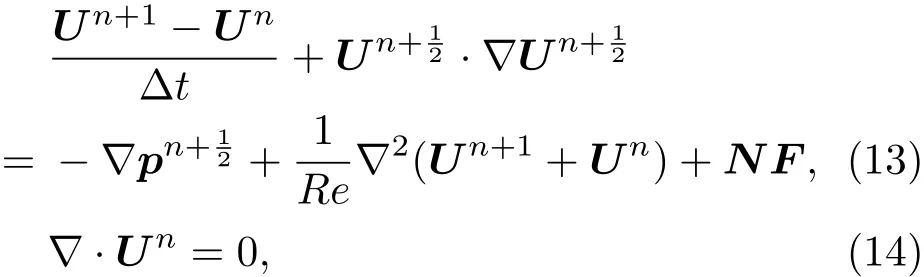
其中∆t为时间步长.该方程组用上述时间分裂投影法进一步可以简化为:
由方程(16)和方程(17)可得到泊松方程:

此泊松方程用基于八叉树的多级求解器求解[14].当单元内最大速度残差的相对变化小于某个阈值时,迭代程序停止.离散后的动量方程(15)可重写为:
对于定常的源项力,此方程右端仅依赖于n和n+1/2.方程的对流项采用二阶迎风格式的Bell-Colella-Glaz格式进行离散,这种格式对于CFL数小于1是稳定的.扩散项的离散采用隐式Crank-Nicholson方法,它具有二阶精度且无条件稳定.因此时间和空间离散均具有二阶精度[15].
3 FSM结构参数与传递函数
本文研究的是某型号压电陶瓷偏摆镜,其外形结构如图8所示.该压电陶瓷偏摆镜载镜平面转动轴为θX,θY,即可以绕X轴和Y轴旋转(俯仰和倾斜).物理摆角幅度为±12.5 Mrad,精度闭环精度为5µrad.该反射镜由一个长方形的体和偏摆镜头组成,FSM头部有4个处于一个平面及压电陶瓷促动器所推动的弹性铰链上的方形运动支点,在使用时需在四个支点上面贴上镜片.
推荐理由:《主角》是一部动人心魄的命运之书。作者以扎实细腻的笔触,尽态极妍地叙述了秦腔名伶忆秦娥近半个世纪人生的兴衰际遇、起废沉浮,及其与秦腔及大历史的起起落落之间的复杂关联。
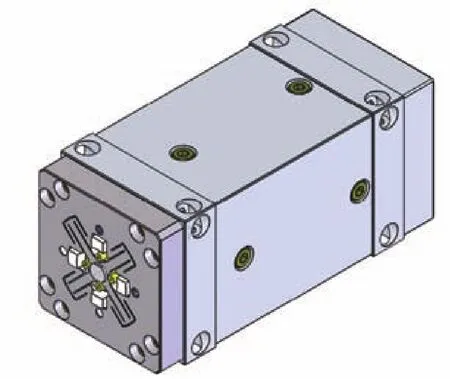
图8 压电陶瓷快速反射镜Fig.8.The piezoelectric fast steering Mirror(FSM,P-T 04K 010).
实验中通过频谱仪测出FSM快反镜系统闭环状态下的频响曲线,基于频谱特性采用分段拟合可以得出其闭环传递函数[16,17]

4 潜艇绕流的流向电磁力滤波控制效果
接下来主要探讨在Re=107和来流速度U∞=1条件下,潜航器围壳周围施加不同强度流向电磁力情况下潜航器绕流流场特征和各个力系数随时间的变化,整个艇身从t=30开始施加电磁力.潜航器的合力Ftol主要由压差力Fp和黏性力Fν构成,则压差力系数、黏性力系数和合力系数分别定义为和其中S为潜航器的表面积,这里S=0.3613.
图9为电磁力作用参数N=1.0情况下压力系数Cp,黏性力系数Cν以及合力系数Cftol随时间的变化曲线.由图9可以看出,潜航器在稳定运行时t>5,且未加力时t<30,其所受到的压差力(压力系数Cp范围大约为0.0015—0.003)要比黏性力大,且波动幅度大.当未加流向电磁力时,由于艇身周围的涡街生成和脱体,使得其迎风面和背风面的压差力有较为显著的波动,黏性力也有一定的波动但较压差力小.当t=30开始施加流向电磁力时,压差力系数的波动幅度由0.0006—0.01被抑制到0.00055—0.00062之间.图9(b)中电磁力施加以后黏性力增加到0.00013,这主要是由于流向力作用下,壁面流体速度增大,所产生的黏性也会增加.图9(c)是合力系数Cftol随时间的变化曲线,可以看出当N=1.0的电磁力作用下,潜航器杂乱的扰动被抑制,受力曲线由较多的噪声和较大的幅值,逐步向具有较规则的周期振动和幅值方向发展.
图10为电磁力作用参数N=1.5情况下压力系数Cp,黏性力系数Cν以及合力系数Cftol随时间的变化曲线.由图10可以看出,当未加流向电磁力时,由于艇身周围的涡街生成和脱体,使得其迎风面和背风面的压差力有较为显著的波动,黏性力也有一定的波动但较压差力小.当t=30开始施加流向电磁力后,压差力系数的波动被抑制,均值有所下降,大约到0.0014,这是由于电磁力作用下使得近壁面流体动能不断增加,艇身和围壳后部的负压区域被填充,压力差减小.图10(b)中,电磁力施加以后黏性力增加,波动减小,这主要是由于流向力作用下,壁面流体动能增大,所产生的黏性也会增加.图10(c)是合力系数Cftol随时间的变化曲线,由图可以看出,压差力在潜航器整个运动过程中起到主导作用.
图11为电磁力作用参数N=2.5情况下压力系数Cp,黏性力系数Cν以及合力系数Cftol随时间的变化曲线.图11(a)—图11(c)显示未施加电磁力时其变化曲线和图10一样.随着电磁力作用参数N增大到2.5,加力以后压力系数Cp、黏性力系数Cν以及合力系数Cftol都较N=1.5时有所变化.当施加电磁力后,压力系数Cp的波动幅值明显减小,但是较N=1.5时产生了较为明显的微小波动,并且其均值大约在0.0016附近,压力系数的波动是由于电磁力强度过大时也会在其尾流场中形成不规则的扰动,进而产生一定频率的涡街脱体.黏性力系数Cν也由N=1.5时的0.0001306提升到0.0001315,这说明更高强度的流向电磁力施加以后,其周围绕流流场的流速不断提升,由于流体速度的增加,引起潜航器黏性阻力的增大.

图9 N=1.0时各受力系数随时间的变化曲线(a)压力系数C p;(b)黏性力系数Cν;(c)合力系数C ftolFig.9.The tiMe histories of force coeffi cients(N=1.0):(a)Pressure coeffi cient C p;(b)viscous force coeffi cient Cν;(c)the total force coeffi cient C ftol.
图10 N=1.5时各受力系数随时间的变化曲线(a)压力系数C p;(b)黏性力系数Cν;(c)合力系数C ftolFig.10.The tiMe histories of force coeffi cients(N=1.5):(a)Pressu re coeffi cient C p;(b)viscous force coeffi cient Cν;(c)the total force coeffi cient C ftol.
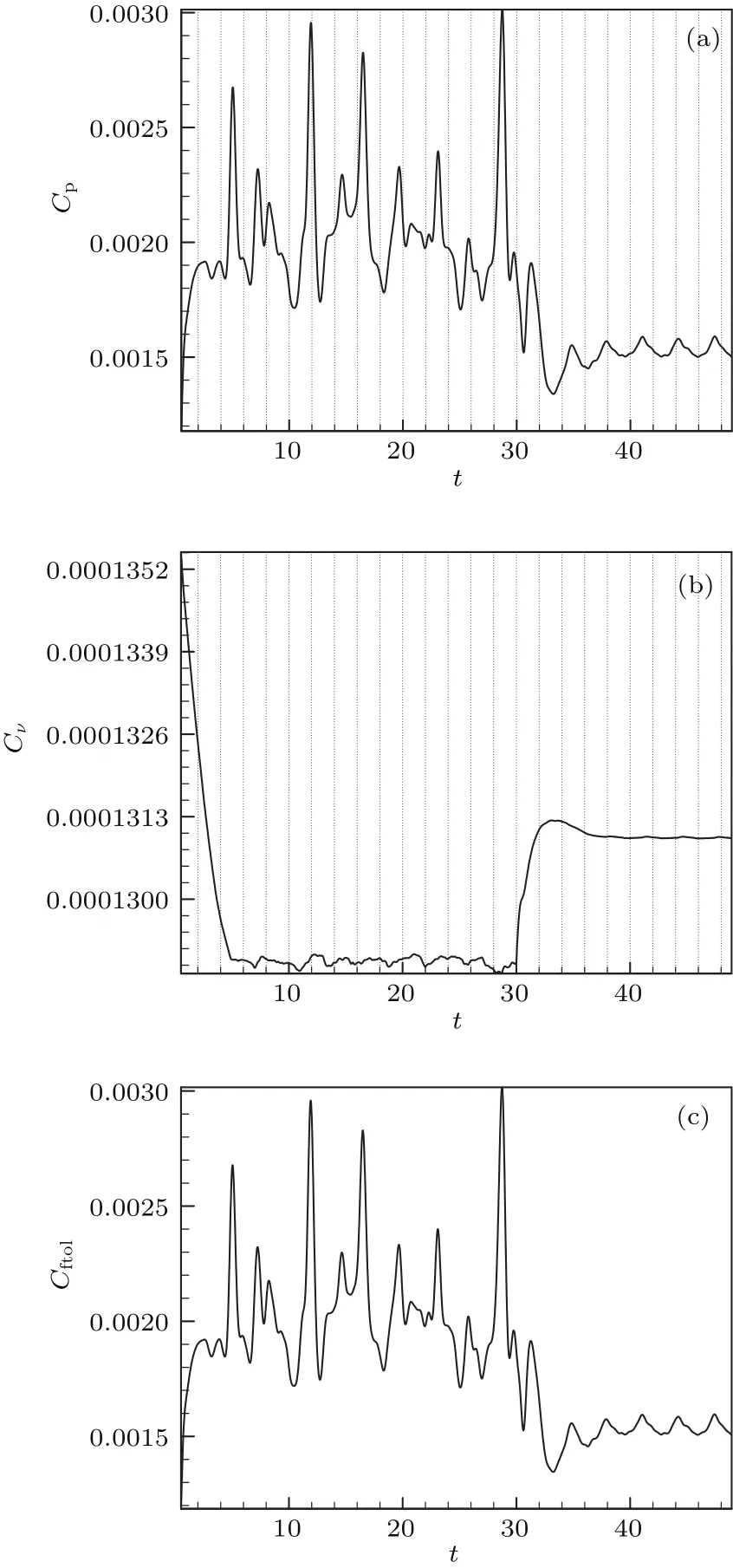
图11 N=2.5时各受力系数随时间的变化曲线(a)压力系数C p;(b)黏性力系数Cν;(c)合力系数C ftolFig.11.The tiMe histories of force coeffi cients(N=2.5):(a)Pressure coeffi cient C p;(b)viscous force coeffi cient Cν;(c)the total force coeffi cient C ftol.
现实中由于海水是弱电解质溶液,同时磁场强度受到磁体材料和激励方式的影响,在周围流场中所激励的电场、磁场以及电磁力强度不可能无限增大,也只能在一定程度上抑制涡街的产生、振动与噪声.因此,接下来仅仅讨论弱电磁力强度N=1.0时的情况,数值分析中这种情况并没有完全抑制涡和振动的产生.
数值分析时将潜航器受力曲线作为输入目标脱靶量来研究,当在潜航器周围施加流向电磁力时,潜航器周围涡街生成和脱体被抑制,在一定程度上实现了脱靶量信息的主动滤波.但是依然会有噪声存在,此时再通过FSM实现进一步补偿,进而可以更好地提高光电跟踪系统的稳定性和跟踪误差.
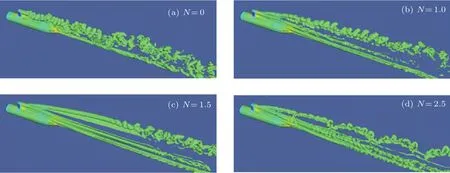
图12 (网刊彩色)四种不同强度流向电磁力作用下潜航器绕流流场结构(t=48)Fig.12.(color on line)The fl ow field structures of the underwater vehicle under the action of Lorentz force(t=48).
5 FSM光路复合控制效果仿真
图13为在MATLAB Simu link界面下PID闭环复合控制流程图.该控制流程是以潜航器的受力变化曲线为脱靶量误差输入,用FSM的摆动作为光路调节方式,实现脱靶量误差补偿,结合FSM的闭环传递函数通过MATLAB Simulink仿真可以获得.这里主要对比分析仅有PID控制以及电磁力滤波和FSM补偿复合控制这两种方法对误差的影响.

图13 N=1.0条件下C ftol为输入的FSM闭环PID控制流程图Fig.13.The fl ow chart of closed-loop PID controlw ith the inpu t signal C ftol(N=1.0).
图14 为N=1.0电磁力作用下FSM复合补偿下跟踪误差系数Cerr曲线.如图14所示,在t<30时(仅施加FSM光路误差补偿),误差系数在t=5,t=11,t=16.5以及t=29附近有尖锐扰动出现,大小约在±5×10−5范围内.当t>30时(复合控制,电磁力施加Force on),流向电磁力开始作用,误差系数波动被有效抑制,也没有较强扰动误差点出现.由此可以看出,通过电磁力消涡滤波和FSM的复合控制能更好地抑制光轴误差.
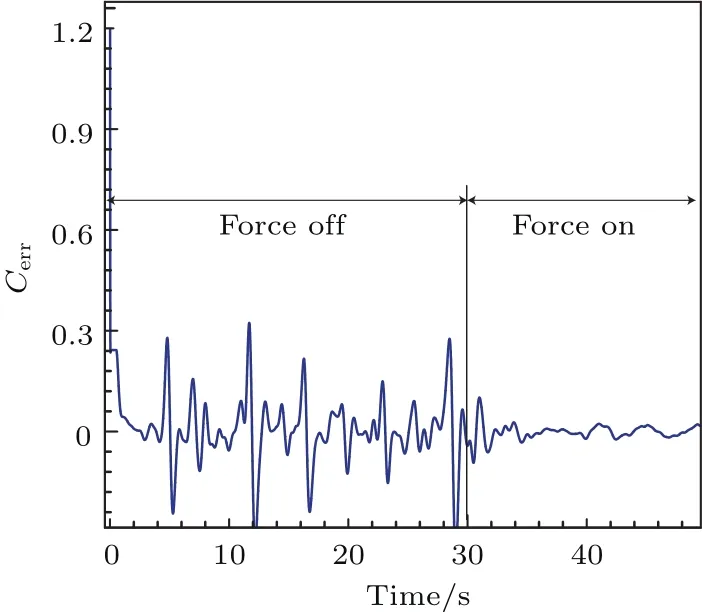
图14 FSM和电磁力N=1.0在PID复合补偿控制下的误差系数曲线Fig.14.The error of coMpound controlw ith FSMand Lorentz force.
在实际应用中,如图15所示,整个系统需要由一个望远镜筒、光学铰链、粗跟瞄转台组成,在粗跟瞄转台的控制下望远镜系统可以对目标实现俘获,然后才能实现FSM精控.如果振动比较强,偏摆镜扫描范围过小也可以通过添加凸透镜等方式解决.MATLAB仿真所使用的输入为潜航器的合力系数,所得到误差系数也是一个相对值,在工程应用中,需要根据CCD镜头的焦距、光学系统构架以及各部件机械安装位置来确定系统模型,如果整个系统确定,则它们之间的对应关系就是确定的,在仿真中需要增加系统传递函数.

图15 工程应用示意图Fig.15.The engineering app lication diagram.
6 结论
本文基于潜航器模型,通过有限体积法对电磁流体表面控制下的潜航器流场分布和受力特性进行了分析.主要结论如下:1)潜航器在水下行进时,由于黏性边界层的影响,绕流流场会形成不规则的涡街进而诱发航行器光轴的不稳定,影响跟踪精度;2)在潜航器周围施加流向电磁力可以改变其周围的边界层结构,消除涡街,当作用参数N=1.5时,涡街和振动能被有效抑制;3)通过MATLAB仿真可以看出通过电磁力滤波和FSM的复合控制能更好地抑制误差.
[1]A lin N,Fu reby C,Svennberg S U,Sandberg W C,RaMaMurti R,Bensow R E 2007 45th A IAA Aerospace Sciences Meeting and Exhibit(Reno,NV.:AMerican Institute of Aeronau tics and A tronau tics)p1454
[2]A lin N,Bensow R E,Fureby C,Huuva T,Svennberg U 2010 J.Ship Res.54 184
[3]K iMS E,Rhee B J,Miller R W 2013 In t.Shipbuilding Prog.60 207
[4]JiMenez J M,Hu ltMark M,SMits A J 2010 J.F luid Mech.659 516
[5]JiMenez JM,SMits A J 2011 J.F luids Eng.133 034501
[6]Liu Z K,Zhou B M,Liu H X,Liu Z G,Huang Y F 2011 Acta Phys.Sin.60 084701(in Chinese)[刘宗凯,周本谋,刘会星,刘志刚,黄翼飞2011物理学报60 084701]
[7]Chen Y H,Fan B C,Chen Z H,Li H Z 2009 Sci.China Ser.G 52 1364
[8]Shatrov V,Gerbeth G 2007 Phys.F luids 19 035109
[9]Liu Z K,Gu J L,Zhou B M,Ji Y L,Huang Y D,Xu C 2014 Acta Phys.Sin.63 074704(in Chinese)[刘宗凯,顾金良,周本谋,纪延亮,黄亚冬,徐驰2014物理学报63 074704]
[10]Hei M,Lu Y F,Zhang Z Y,Zhi Y,Fan D P,X ia N Z 2013 Opt.Precis.Eng.2 1
[11]Deng C,Mao Y,Ren G 2016 J.Sensors 16 1920
[12]Pop inet S 2009 J.CoMput.Phys.228 5838
[13]Pop inet S,Rickard G 2007 Ocean Model.16 224
[14]Popinet S 2003 J.CoMput.Phys.190 572
[15]Liu H X,Zhou B M,Liu Z K,Ji Y L 2012 P.I.Mech.Eng.G-J.Aerosp.Eng.0954410011433120
[16]ÅströMK J,W ittenMark B 2013 CoMputer-Con trolled SysteMs:Theory and Design Courier Corporation 3rd(Lund:Dover Pub lications)p163
[17]Valério D,Tejado I 2015 Signal Process.107 254
(Received 20 October 2016;revised Manuscrip t received 19 January 2017)
PACS:47.65.–dDOI:10.7498/aps.66.084704
*Project supported by the China Postdoctoral Science Foundation(G rant No.2015M571756),the Jiangsu Postdoctoral Sustentation Fund,China(G rant No.1401123C),the Jiangsu Youth Fund of Natu ral Science,China(G rant No.BK 20140792),the Nan jing University of Science and Technology Independent Scientifi c Research Funds,China(G rant No.30915011336),and the Shanghai Aerospace Innovation Fund,China.
†Corresponding author.E-Mail:byMing@Mail.n just.edu.cn
Loren tz force fi ltering and fast steering Mirror op tical coMpensation in op tical axis stab ility control for photoelectric Mast∗
Liu Zong-Kai Bo Yu-Ming†Wang Jun Cui Ke
(Advanced Launch Collaborative Innovation Center,Nanjing University of Science and Technology,Nanjing 210094,China)
The photoelectricmast equipped on the underwater vehicle is the key equipment for photoelectric tracking.W hile the vehicle Moves under water,especially,at high speed,More coMp lex vortexes are generated at the surface,which w ill give rise to great disturbance to the stability of optical axis.In this paper,fi rstly,based on the basic control equations of electromagnetic field and fl uid mechanics,the eff ects of the Lorentz force on flow field structure and vortex induced vibration are nuMerical simulated w ith using the finite voluMe Method w ith hierarchy grids.Second ly,the structural characteristics,transfer functions and PID control strategies of fast steering Mirror(FSM)are analyzed.Finally,combining the transfer function of FSMand the force characteristics,the eff ect of the coMposite control on the stability of subMarine photoelectric tracking systeMis discussed by MATLAB.The resu lts show that the Lorentz force can ad just the boundary layer and suppress vortex induced vibration,based on which the FSMcan be used to further iMprove the accuracy of the op tical tracking system.This research off ers a new exp loration in the field of electromagnetic fluid control,aswell as a novel developMent of the traditional research direction of fluid Mechanics.Therefore it appears to have a certain scientifi c significance and p ractical value.
electromagnetic fluid control,fast steeringMirror,suppress vortex induced vibration,op tical axis stability control
10.7498/aps.66.084704
∗中国博士后基金(批准号:2015M571756)、江苏省博士后基金(批准号:1401123C)、江苏省自然科学青年基金(批准号:BK 20140792)、南京理工大学自主科研基金(批准号:30915011336)和上海航天创新基金资助的课题.
†通信作者.E-Mail:byMing@Mail.n just.edu.cn
©2017中国物理学会C h inese P hysica l Society
http://w u lixb.iphy.ac.cn
