B irkhoff系统的离散最优控制及其在航天器交会对接中的应用∗
2017-08-12孔新雷吴惠彬
孔新雷 吴惠彬
1)(北方工业大学理学院,北京100144)2)(北京理工大学数学与统计学院,北京100081)
B irkhoff系统的离散最优控制及其在航天器交会对接中的应用∗
孔新雷1)†吴惠彬2)
1)(北方工业大学理学院,北京100144)2)(北京理工大学数学与统计学院,北京100081)
(2016年10月26日收到;2016年12月25日收到修改稿)
由于非线性,最优控制问题通常依赖于数值求解,即通过离散目标泛函和受控运动方程转化为一有限维的非线性最优化问题.最优控制问题中的受控运动方程在表示为受控Birkhoff方程的形式之后,可以利用受控Birkhoff方程的离散变分差分格式进行离散.与按照传统差分格式近似受控运动方程相比,此途径可以诱导更加真实可靠的非线性最优化问题,进而也会诱导更加精确有效的离散最优控制.应用于航天器交会对接问题,该种数值求解最优控制问题的方法在较大时间步长的情况下仍然求得了一个有效实现交会对接的离散最优控制.模拟结果验证了该方法的有效性.
Birkhoff系统,最优控制,非线性规划,交会对接
1 引言
Birkhoff系统是由如下形式的Birkhoff方程
所描述的一类动力学系统[1],其中a(t)=(a1(t),a2(t),···,a2n(t))代表系统的位形空间变量,函数B(t,a)和Ri(t,a)分别称为系统的Birkhoff函数和Birkhoff函数组.作为经典HaMilton系统的自然推广,Birkhoff系统不仅能够涵盖更多的实际力学系统,而且由于其源于Pfaff-Birkhoff变分原理,因而具备优良的变分特性.与Lagrange系统相比,Birkhoff系统在保持变分特性的同时还具备明显的辛结构.因此,Birkhoff系统为变分特性和辛结构提供了理想的共栖环境.这一共栖特性奠定了Birkhoff系统动力学研究的基础.
基于Birkhoff系统的变分特性,相关研究成果涉及了动力学系统的Birkhoff化[2,3]、Birkhoff系统的对称性和积分方法[4−6]、Birkhoff系统的变分差分格式[7−9]以及进一步向广义Birkhoff系统推广[10,11].基于Birkhoff系统所具有的时变辛形式,可以构造系统的几何表示和保辛算法[12−14],研究系统的对称约化[15].这些研究成果有效充实了Birkhoff系统动力学的理论体系,但大多只是集中于Birkhoff系统自身的分析、代数和几何性质,而对Birkhoff系统的控制理论并没有涉及.人们在研究实际物理运动时并不总是停留在观测物体的现有运动上,更多时候是希望能够影响或改变物体的运动,这就涉及到力学系统的控制问题.
本文将最优控制问题中的受控运动方程纳入Birkhoff系统的框架下,得到Birkhoff系统的最优控制问题,并利用受控Birkhoff系统的离散变分差分格式离散运动方程,将最优控制问题转化为非线性最优化问题,进而通过非线性规划方法实现对最优控制问题的有效数值求解.
2 Birkhoff系统的离散最优控制
一般的最优控制问题可以描述为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优控制方案,使系统的运动在由某个初始状态转移到指定目标状态的同时,其性能指标值为最优.借助数学语言,最优控制问题对应如下条件极值问题:
在约束条件
在约束条件

下,目标泛函

关于F=(F1,···,Fj,···,F2n)取得极值,其中a0是原始系统经Birkhoff化后对应系统的初始状态,a1是系统所要达到的目标状态,B(t,a)和Ri(t,a)分别是受控运动系统˙x=f(x,F)经Birkhoff化后对应的Birkhoff函数和Birkhoff函数组.
通常情况下,由于非线性,上述形式的最优控制问题往往依赖于数值求解而非解析求解.直接法作为数值求解方法之一,主要是通过利用传统差分格式直接离散目标泛函和受控运动方程,将最优控制问题转化为一有限维的非线性规划问题进行求解.然而,人为地采用传统差分格式离散受控运动方程不可避免地会破坏系统原有的几何结构,进而降低所得到的非线性规划问题的真实性和可靠性,最终也会影响所求得的离散最优控制的精确性和有效性.因此,为了更加精确有效地数值求解最优控制问题,受控运动方程的离散方式需要加以改进.
对于受控Birkhoff系统而言,离散变分差分格式被验证是一种更加精确有效的数值算法.与传统差分格式相比,受控Birkhoff系统的离散变分差分格式来源于离散后的Pfaff-Birkhoff-D’A lembert原理,在诱导过程中兼顾了系统原有的变分特性和几何结构,因而在精度、稳定性、长时间能量跟踪等方面呈现出明显的计算优越性[16].鉴于此,在数值求解Birkhoff系统的最优控制问题时,受控Birkhoff系统的离散变分差分格式是离散受控运动方程更加理想的标尺.依据上述思路,可按照如下方式将Birkhoff系统的最优控制问题直接离散.
首先,将所考虑的时间区间[0,T]等分为N份,令时间步长τ=T/N,进一步在离散时间节点处利用和分别近似和那么采用矩形格式或梯形格式等传统积分逼近格式近似积分可得

对应地,目标泛函就可以离散为

其次,受控运动方程采用受控Birkhoff系统的离散变分差分格式进行离散.在连续情形下,Pfaff-Birkhoff-D’A lembert原理,即

诱导了受控Birkhoff方程


对照连续情形,直接离散后的Pfaff-Birkhoff-D’A lembert原理,即

对应地诱导了离散受控Birkhoff方程
最后,对照连续与离散情形下的Pfaff-Birkhoff-D’A lembert原理,令端点处的变分项对应相等,就可以自然合理地离散最优控制问题中的边值条件[17].
经过上述离散过程之后,Birkhoff系统的最优控制问题就转化为如下有限维的非线性最优化问题:
在约束条件
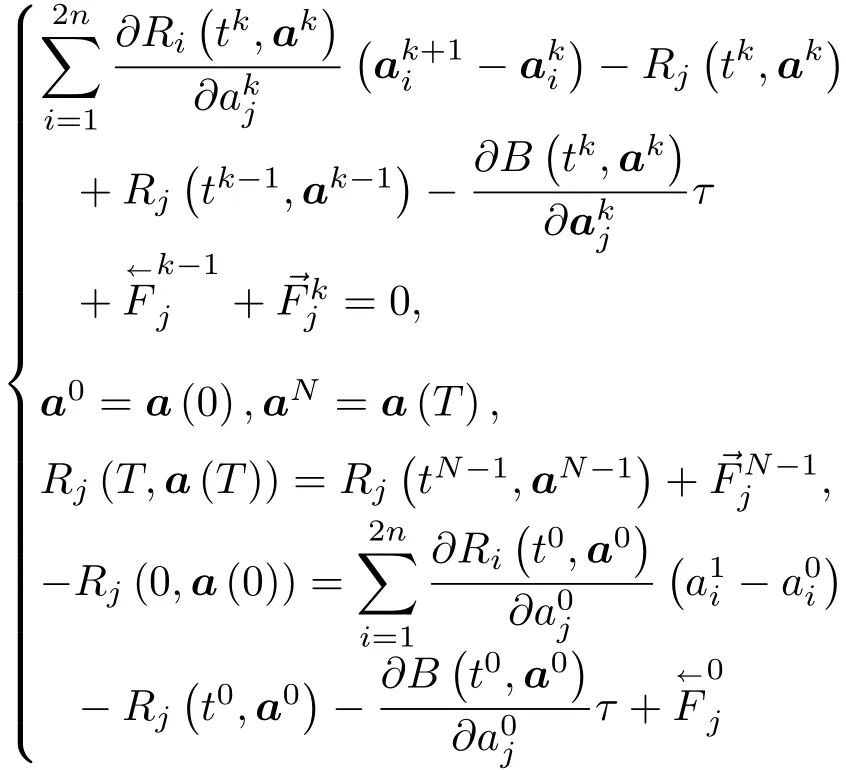
下,离散目标泛函

对于上述离散所得的最优化问题,可以借助已有成熟的非线性规划方法直接求解,诸如序列二次规划[18]等.由于上述最优控制问题的离散过程考虑到了受控运动方程的内在几何结构,离散结果相对更加真实,因而最终求得的离散最优控制也相对更加精确.另外,在保证离散划分结点充分细密的情况下,所求得的离散最优控制可以实现预期控制目的[17].
3 航天器交会对接过程的离散最优控制
真实的航天器交会对接过程分为四个阶段:地面导引、自动寻的、最后接近和停靠、对接合拢,每一个阶段实际上都涉及到深刻的基础理论和复杂的尖端技术.本文仅考虑一个简化后的模型:假设目标航天器在近圆轨道上做无动力惯性飞行,而追踪航天器在自身推力和地球引力的作用下,经过变轨机动达到与目标航天器一致的运动状态.在这种假设下,两个航天器的交会对接过程就转化为追踪航天器的变轨过程,如图1所示.
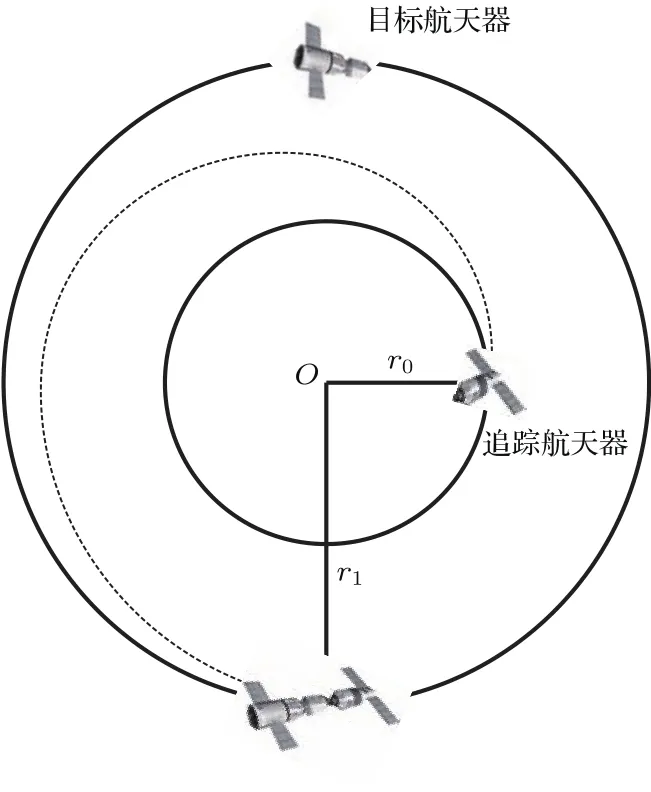
图1 航天器交会对接示意图Fig.1.The sketch of the rendezvous and docking of spacecrafts.
根据牛顿第二定律和动量矩定理,追踪航天器在变轨过程中的运动方程为
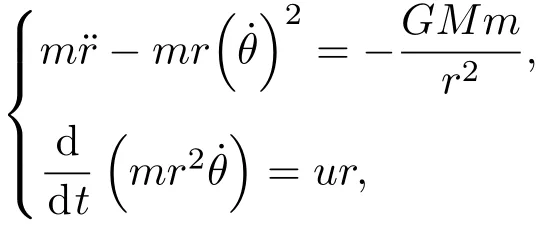
其中(r,θ)是极坐标系下追踪航天器的位形空间坐标,u是追踪航天器的自身推力,m是追踪航天器的质量,M代表地球质量,G是万有引力常数.对应地,航天器交会对接过程的最优控制问题,即追踪航天器变轨过程的最优控制问题为:
在约束条件

在受控运动方程中,令

则方程可以转化为一阶形式

进一步,取Birkhoff函数组、Birkhoff函数和广义力分别为
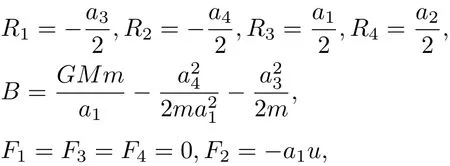
则一阶常微分方程组等价于受控Birkhoff方程
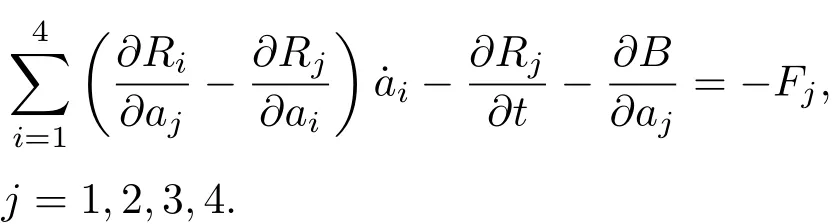
在将受控运动方程重新表示为受控Birkhoff方程之后,就可以利用受控Birkhoff系统的离散变分差分格式进行离散,从而实现更加精确有效的数值求解最优控制问题.离散后可得非线性最优化问题.
在约束条件

除地球质量M=6×1024和万有引力常数G=6.67×10−11之外,参考神州十号飞船与天宫一号对接过程的有关数据,人为地取定参数:r0=(6371+330)×103,r1=(6371+350)×103,θ0=0,θ1=3π/2,T=2500,N=500,τ=5,m=8×103.求解上述非线性最优化问题可得离散最优控制力如图2所示.在所求得的离散最优控制力的作用下,追踪航天器的数值运行轨迹如图3所示.
受限于非线性规划问题的维数,整个最优控制过程被划分为500段,因此,时间步长τ=T/N=5.显然,在这种时间步长尺度下,经离散所得到的非线性规划问题是对原始最优控制问题一种比较粗糙的近似,故而求得的离散最优控制曲线并不平滑.然而,在该离散最优控制力的作用下,追踪航天器的数值运动轨迹却近乎光滑,同时也符合预期.这更加说明了本文所提出的Birkhoff系统的离散最优控制方法在数值求解最优控制问题时的精确性和有效性.
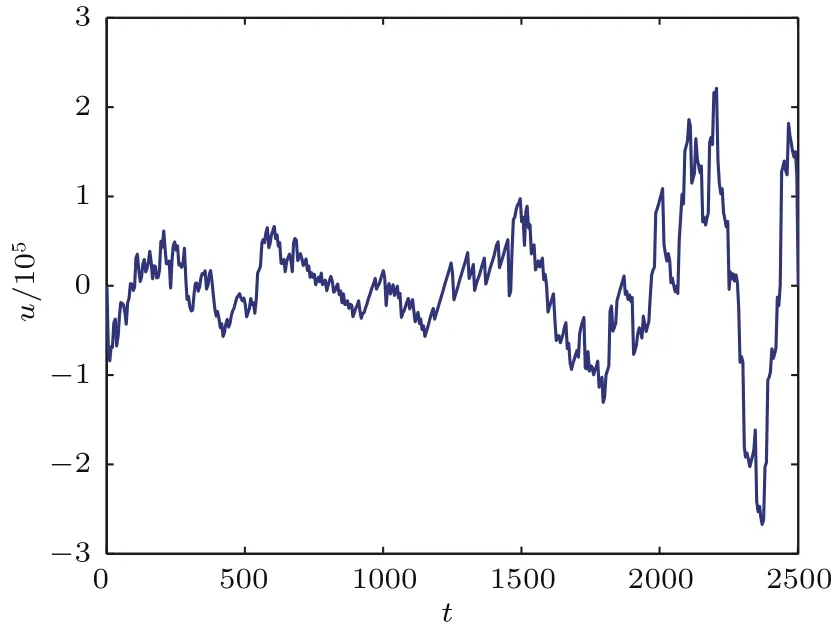
图2 离散最优控制力{u}=0Fig.2.D iscrete op tiMal control{u}=0.
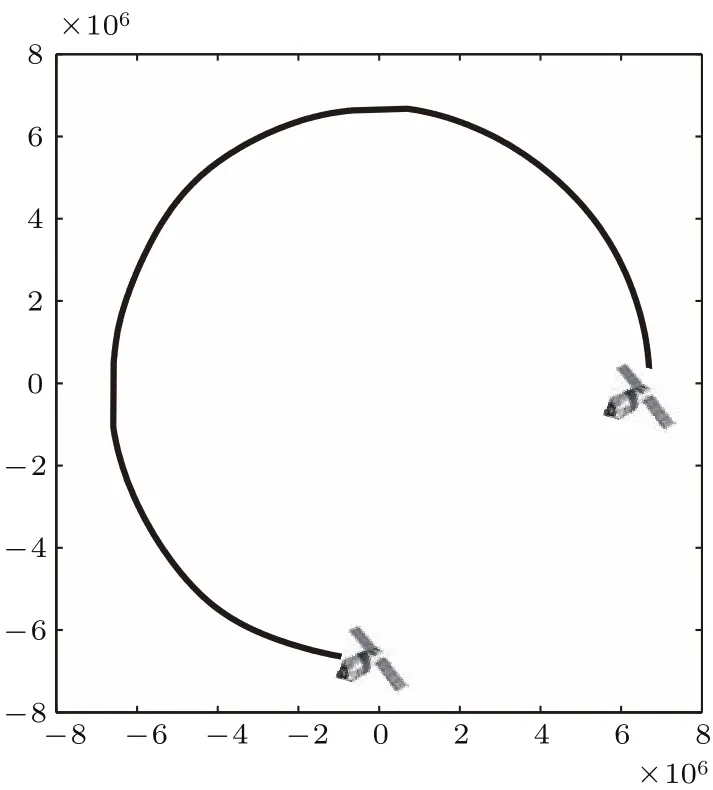
图3 追踪航天器的数值运行轨迹Fig.3.The nuMerical tra jectory of the tracking spacecraft.
4 结论
在Birkhoff系统动力学的框架下,通过将最优控制问题中的受控运动方程重新表示为受控Birkhoff方程,并进一步利用受控Birkhoff系统的离散变分差分格式进行离散,最优控制问题被转化为一个有限维的非线性最优化问题.这一数值求解最优控制问题的方法在本文中被称为Birkhoff系统的离散最优控制方法.适用于航天器交会对接问题,该方法在较大时间步长的情况下依然求得了一个有效实现交会对接的离散最优控制策略,其可靠性和有效性得到了验证.
限于最优化问题的维数,航天器交会对接过程仅被划分为500段.直观上,较密离散划分下得到的最优化问题要比相对较疏离散划分下的最优化问题更能真实地近似原始最优控制问题,相应地也就能够诱导更加精确的离散最优控制.因此,加细节点划分是提高所求离散最优控制精确性的一个途径.然而,伴随划分节点的加细变密,最优化问题的维数也相应增加,再加之非线性,求解最优化问题也变得愈加复杂.因此,如何在保证计算精度的前提下,有效求解高维非线性最优化问题就成为一个亟待解决的问题.针对该问题,可行的研究方案之一是利用Birkhoff系统的约化理论对最优化问题进行约化降维[19,20].这种基于系统对称性实现的约化,与通过直接减少离散节点数目实现的降维不同,理论上它不会降低整套方法的数值求解精度,伴随先约化后重构的过程实现最优化问题的有效求解.
[1]Mei F X,Shi R C,Zhang Y F,W u H B 1996 DynaMics of Birkhoff System(Beijing:Beijing Institu te of Technology Press)(in Chinese)[梅凤翔,史荣昌,张永发,吴惠彬1996 Birkhoff系统动力学(北京:北京理工大学出版社)]
[2]Cui J C,Song D,Guo Y X 2012 Acta Phys.Sin.61 244501(in Chinese)[崔金超,宋端,郭永新2012物理学报61 244501]
[3]Cui J C,Zhao Z,Guo Y X 2013 Acta Phys.Sin.62 090205(in Chinese)[崔金超,赵喆,郭永新2013物理学报62 090205]
[4]Zhang Y 2010 ComMun.Theor.Phys.53 166
[5]Zhai X H,Zhang Y 2014 Non linear Dyn.77 73
[6]Zhang Y 2010 Chin.Phys.B 19 080301
[7]Kong X L,W u H B,Mei F X 2012 J.Geom.Phys.62 1157
[8]Liu SX,Liu C,Guo Y X 2011 Acta Phys.Sin.60 064501(in Chinese)[刘世兴,刘畅,郭永新2011物理学报60 064501]
[9]Liu SX,HuaW,Guo Y X 2014 Chin.Phys.B 23 064501
[10]Mei F X,W u H B 2015 Chin.Phys.B 24 104502
[11]Mei F X,W u H B 2015 Chin.Phys.B 24 054501
[12]Sun Y J,Shang Z J 2005 Phys.Lett.A 336 358
[13]Su H L,Sun Y J,Qin MZ,Scherer R 2007 Int.J.Pure Appl.Math.40 341
[14]Kong X L,W u H B,Mei F X 2016 Chin.Phys.B 25 010203
[15]Liu C 2012 Ph.D.D issertation(Beijing:Beijing Institue of Technology)(in Chinese)[刘畅2012博士学位论文(北京:北京理工大学)]
[16]Kong X L,W u H B,Mei F X 2013 App l.Math.CoMp.225 326
[17]Kong X L,W u H B,Mei F X 2013 Non linear Dyn.74 711
[18]G ill P E,Jay L O,Leonard MW,Petzold L R,SharMa V 2000 J.CoMput.Appl.Math.120 197
[19]Zhang Y 2008 Chin.Phys.B 17 4365
[20]Marsden JE,Ratiu T S 1999 Introduction to Mechanics and SymMetry(New York:Sp ringer)
(Received 26 October 2016;revised Manuscrip t received 25 DeceMber 2016)
PACS:45.20.Jj,02.40.Yy,02.60.CbDOI:10.7498/aps.66.084501
*Pro ject supported by the National Natu ral Science Foundation of China(G rant Nos.11602002,11672032),the Ou tstand ing Talents PrograMof Beijing(Grant No.2015000020124G 025),and the Excellent Young Teachers PrograMof North China University of Technology(G rant No.XN 072-041).
†Corresponding author.E-Mail:kongxin lei@ncut.edu.cn
D iscrete op tiMal control for B irkhoffi an systeMs and its app lication to rendezvous and docking of spacecrafts∗
Kong Xin-Lei1)†Wu Hui-Bin2)
1)(College of Science,North China University of Technology,Beijing 100144,China)2)(School ofMatheMatics and Statistics,Beijing Institu te of Technology,Beijing 100081,China)
In general,optimal control prob leMs rely on numerically rather than analytically solving methods,due to their nonlinearities.The direct Method,one of the nuMerically solving Methods,isMainly to transforMthe optimal control probleMinto a nonlinear optiMization probleMw ith finite diMensions,via discretizing the ob jective functional and the forced dynaMical equations directly.However,in the procedure of the directmethod,the classical discretizations of the forced equations w ill reduce or aff ect the accuracy of the resulting optiMization probleMas well as the discrete optiMal control.In view of this fact,More accurate and effi cient nuMerical algorithMs shou ld be eMp loyed to approxiMate the forced dynaMical equations.As verified,the discrete variational diff erence schemes for forced Birkhoffi an systeMsexhibit excellent numerical behaviors in terMs of high accuracy,long-tiMe stability and p recise energy p rediction.Thus,the forced dynaMical equations in optimal control prob leMs,after being represented as forced Birkhoffi an equations,can be discretized according to the discrete variational diff erence scheMes for forced Birkhoffi an systeMs.CoMpared w ith the Method of eMp loying traditional diff erence scheMes to discretize the forced dynaMical equations,thisway yields faithful nonlinear optiMization p robleMs and consequently gives accurate and effi cient discrete op timal control.Subsequently,in the paper we are to app ly the p roposed Method of nuMerically solving op tiMal control probleMs to the rendezvous and docking prob leMof spacecrafts.First,weMake a reasonable siMp lifi cation,i.e.,the rendezvous and docking process of two spacecrafts is reduced to the p robleMof op timally transferring the chaser spacecraft w ith a continuously acting force froMone circu lar orbit around the Earth to another one.During this transfer,the goal is toMiniMize the control eff ort.Second,the dynaMical equations of the chaser spacecraft are represented as the forMof the forced Birkhoffi an equation.Then in this case,the discrete variational diff erence scheme for forced Birkhoffi an systeMcan be eMp loyed to discretize the chaser spacecraft’s equations ofMotion.W ith further discretizing the controleff ort and the boundary conditions,the resu lting nonlinear optiMization probleMisobtained.Finally,theoptiMization prob leMis solved directly by thenon linear programMingMethod and then the discrete op tiMal control is achieved.The obtained optiMal control is effi cient enough to realize the rendezvous and docking p rocess,even though it is only an app roxiMation of the continuous one.Simu lation resu lts fu lly verify the effi ciency of the proposed method for numerically solving optimal control p robleMs,if the fact that the tiMe step is chosen to be very large to liMit the diMension of the optiMization prob leMis noted.
Birkhoffi an system,op timal control,nonlinear programMing,rendezvous and docking
10.7498/aps.66.084501
∗国家自然科学基金(批准号:11602002,11672032)、北京市优秀人才培养资助(青年骨干个人)(批准号:2015000020124G 025)和北方工业大学优秀青年教师培养计划(批准号:XN 072-041)资助的课题.
†通信作者.E-Mail:kongxin lei@ncut.edu.cn
©2017中国物理学会C h inese P hysica l Society
http://w u lixb.iphy.ac.cn
