一种基于改进UKF滤波的GPS+PDR组合定位方法
2017-08-11廉保旺
牛 欢,廉保旺
(西北工业大学电子信息学院,陕西 西安 710072)
一种基于改进UKF滤波的GPS+PDR组合定位方法
牛 欢,廉保旺
(西北工业大学电子信息学院,陕西 西安 710072)
针对接收信号质量恶化的环境,提出了一种适用于信号遮蔽环境的改进GPS+PDR组合定位算法。该方法用短时间内的陀螺仪积分数据校正数字罗盘的航向偏差,在一定程度上消除了数字罗盘受到的偶发干扰。采用约束残差的无迹卡尔曼滤波(UKF)算法对GPS和行人航迹推算(PDR)定位信息进行融合处理,有效克服了PDR定位中累积航向误差产生的位置漂移问题,提高了算法的定位精度和稳定性。试验结果表明,改进算法能有效抑制数字罗盘的漂移误差,航向相对误差平均降低56%;行人步行时,GPS定位标准误差为2.67 m,单纯PDR定位标准误差为6.83 m;随机给予若干点GPS数据辅助定位,标准误差降至3.12 m;全程融合GPS与PDR定位,标准误差可降至1.94 m。
GPS;行人航迹推算;组合导航;多传感器数据融合;精度;无迹卡尔曼滤波
在密集建筑区、大型商场等信号遮蔽严重的环境中,因信号质量变差,GPS定位精度迅速下降甚至无法定位。目前针对室内等信号遮蔽环境的主要定位技术包括红外定位技术、射频识别定位技术(radio frequency identification,RFID)、ZigBee技术、行人航迹推算技术(pedestrian dead reckoning,PDR)等[1-2]。其中,基于MEMS传感器的行人航迹推算技术,无需接收外部信号,通过测定步频、计算步长和航向角,即可完成基本的位置计算,并且受环境影响较小,因此得到了广泛研究。
PDR技术具有短时间内定位精度高,但定位误差随时间积累逐渐增大的特点。文献[3—4]指出了航向估计偏差是PDR定位误差的重要来源。文献[5—6]提出了WiFi和地标识别融合定位算法,并辅助地磁测量组件,通过WiFi指纹识别和建筑标志特征匹配,利用MEMS设备接收肌电信号,能够有效提升定位精度和稳定度。但是,融合WiFi指纹特征或建筑特征等算法均需要布置额外的硬件设施,提前测绘生成特征数据库以供后续匹配使用,系统构建复杂,实现代价较高,并且目前大部分室内消费场所不具备上述条件,可穿戴设备的市场应用尚不成熟,主流设备仍然以智能手环为主,需要与智能手机或其他设备通信后才能查看结果,这给普通消费者的使用带来不便。
本文基于智能手机平台,通过MEMS传感器采集数据,利用加速度计测量值进行步伐检测,以陀螺仪短期测量值校正磁罗盘航向,进而获得行人航迹推算定位结果,最后采用约束残差的无迹卡尔曼滤波(uanscented kalman filier,UKF)算法,将PDR定位结果与GPS定位结果相融合,能有效克服外界突发扰动,提高了信号遮蔽环境下行人定位结果的精度与稳定性。
1 算法原理
UKF方法的具体计算过程可参考文献[7],由于此法本质上仍然属于卡尔曼滤波体系,其保留了与传统卡尔曼滤波器类似的缺陷。比较严重的一点就是当系统趋于稳定状态时,所有卡尔曼滤波器均趋于稳态[8]。此时滤波器的预测协方差和增益同时趋于极小值。如果系统状态发生突变,此时滤波残差会迅速增大,而预测协方差和增益会存在一定滞后性,进而使UKF滤波器丧失对系统状态突变的跟踪。为了克服UKF滤波算法在系统稳态时针对状态突变的响应缺失问题,可以通过适当改变方差的加权因子,进而改善滤波器的收敛性[9]。
模型噪声和观测噪声的非线性系统状态空间模型如下
xk=f(xk-1,uk-1)+wk-1
(1)
zk=h(xk)+vk
(2)
式中,k表示不同的离散时刻,xk/xk-1和zk分别为滤波系统的状态量与观测量;uk-1为滤波系统的输入变量;f()和h()表示已知且有界的非线性传递函数;噪声wk-1和vk均为高斯白噪声,其方差分别为Qk和Rk。
状态量的更新形式同一般的高斯滤波器结构,即
(3)


(4)
LMDk=diag[η1,k,η2,k,…,ηn,k]
(5)
式中,Pk,k-1为一步预测状态的自方差,LMDk为对角渐消阵;ηi,k≥1,i=1,2,…,n,为渐消因子,与滤波器增益呈正相关性[10];χi,k,k-1是经过UT变换后的预测状态Sigma点集中的元素。计算Sigma点集时,通常采用对称采样策略,为了提高算法的实时性,可使用改进的UT变换,减少Sigma点集中的点数,进一步提高UKF效率[11]。
为了尽可能地抑制由残差增大所产生的跟踪误差,设法对上述UKF系统进行残差约束。文献[9]证明对上述滤波器进行残差约束的充分条件如下
(6)
(7)
当滤波器对系统状态的刻画比较准确时[12],可以近似得到

(8)
式中,Pxkzk为状态值和观测值的协方差;C0,k为残差估计矩阵,滤波器达到最优增益时,其值为0。
由式(8)成立的条件结合上文可推出残差阵C0,k的更新公式如下
(9)
式中,ρ为滤波遗忘因子,取值范围为(0,1]。
2 系统架构和流程
2.1 基于智能手机的PDR定位
PDR定位原理如文献[13]所述,本文采用文献[14]提出的方法进行步频检测和步长测定。航向可通过数字罗盘感知地磁场强度变化进行计算,利用智能手机内置数字磁罗盘所测得的磁场信息(Mx,My,Mz),可得到当地的磁场水平分量Xh与Yh。
磁航向角[15]计算公式为
(10)
式中,φM0为磁航向角,查表得到当地磁偏角,修正后可以得到测试者位置的航向角φM。
如上文所述,航向偏差是PDR定位误差的重要来源,磁罗盘除受内部误差干扰外,本身更容易受各类铁制品和使用环境的磁场影响,导致航向误差增大。而陀螺仪传感器本身不受磁场干扰影响,但智能手机内置的陀螺仪普遍精度较低,其零偏普遍分布在40°-80°/h,最大可达100°/h,根据其测量值得出的相对航向仅在较短时间内具有有效性。
依据上述传感器特性,采用闭环控制法进行航向校正,具体处理过程可以按照下述阶段进行。
(1) 初始化对准,用电子罗盘输出估计陀螺仪零位残差。
(2) 利用Adams方法求出陀螺仪相对航向,然后与电子罗盘输出航向比较,结果进入控制环路。
(3) 滤波估计下一状态,补偿罗差,得到修正航向。
航向修正流程如图1所示。
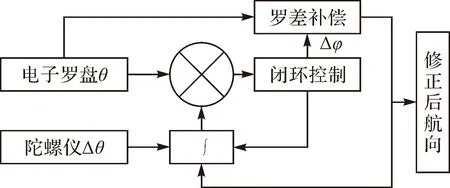
图1 航向修正流程
2.2 改进的组合定位方法
采用上述约束残差的UKF算法(RC-UKF)将GPS定位结果与PDR结果进行融合处理。定义滤波器的状态向量为
(11)
式中,E、N分别为“东-北-天”空间坐标系中的东向坐标和北向坐标;L为行人步长;θ为航向角。
观测向量为
(12)
状态方程为
(13)
式中,Wk为动态噪声扰动,各分量可近似认为服从均值为0的高斯分布。
图2展示了改进的RC-UKF融合算法处理流程,GPS定位信息提供了起始位置和滤波初值,加速度计判定运动状态变化,陀螺仪和电子罗盘协同提供航向角,系统检测到运动状态变动时运行滤波算法更新运动状态。
3 试验设计和数据分析
3.1 试验环境选择和参数设定
试验时使用的测试设备为Lenovo公司生产的K52e78型号智能手机,为确保GPS信号的可控性,选取西北工业大学学生操场为测试环境,含有一标准400 m跑道,场地开阔无遮挡,卫星信号接收环境良好,具有高精度经纬度信息,起始坐标设定为(34.032 771,108.760 946),参考点坐标设定为(34.032 994,108.760 791)。测试路径包含直行、直角转弯、环形轨道等部分,全长360 m,其中直行段长边110 m,宽边70 m,环形轨道长90 m,半径37 m。具体路径如图3所示,用字母A、B、C、D注明转弯节点,白色星号标注路径起始位置。为统一标准,便于分析,试验时将PDR测试结果转化为绝对坐标。
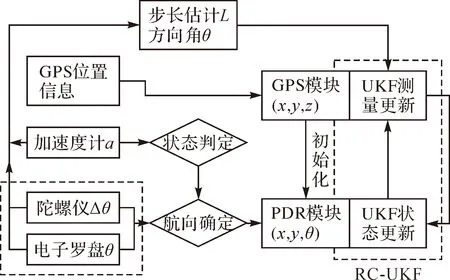
图2 RC-UKF融合算法系统框
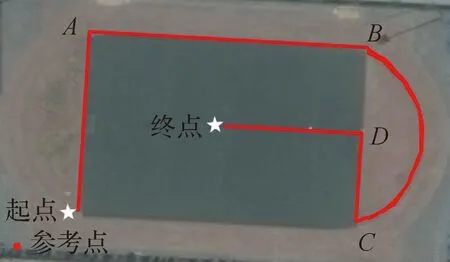
图3 测试路径
3.2 算法性能分析
航向测试时,用一个可控电磁铁作为数字罗盘的干扰源。所用电磁铁在常温下测得表面平均磁场强度约0.5 T,可对20 cm内的电子罗盘产生有效干扰。取正北方向为航向零值,逆时针为正方向,试验采用45°、90°、180°等不同转向角度情形。
试验结果见表1和表2,通过比较测量航向与实际航向,可见无论是否有干扰,改进算法均能提升航向精度。无干扰时,转向阶段航向角的标准偏差小于10°,且转向幅度越小,偏差越小;有干扰时,罗盘示数已失去意义,而改进算法把转向阶段航向角的标准误差降低了56%,仍具有一定参考价值。
GPS模块定位时,除设备冷启动搜星阶段耗时较长,后续单次定位耗时大约在3~8 s。为模拟信号遮蔽环境,对系统融合模块加入人工阻塞,每5 s进行一次阻塞发生判定,单次阻塞片段持续5 s。可以通过调整阻塞发生概率P以表征GPS信号接收环境的恶劣程度,阻塞率P值越大,信号环境越差。
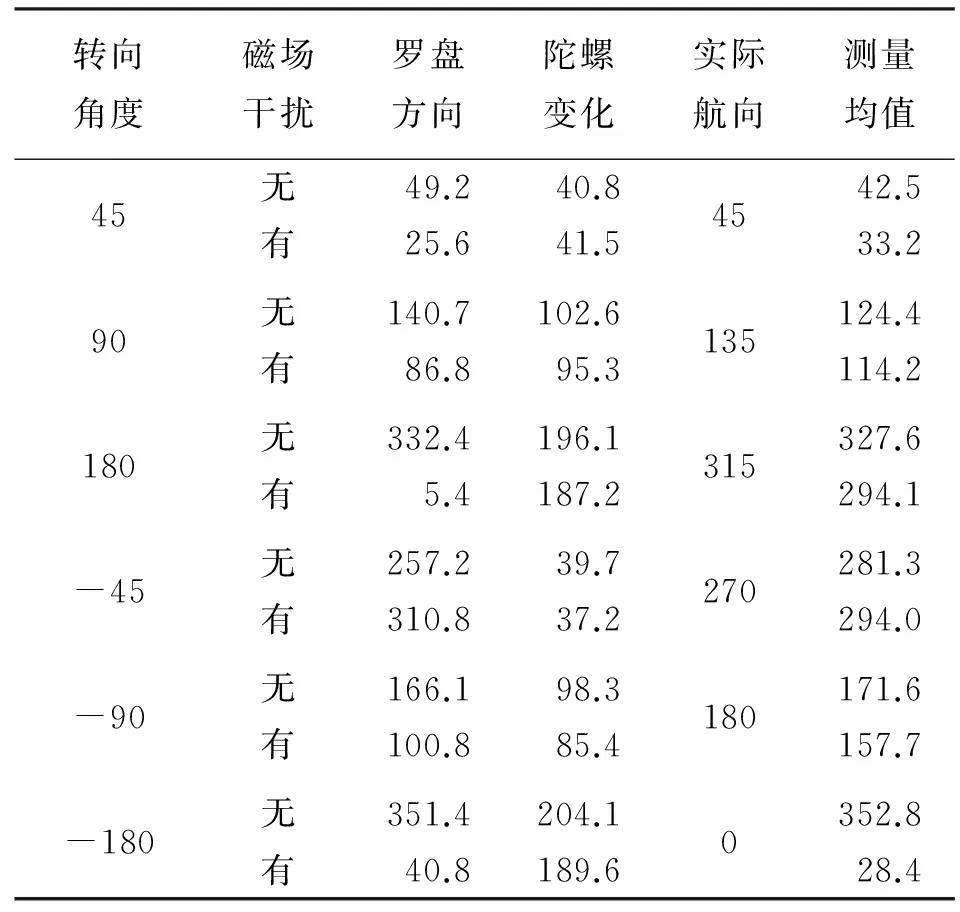
表1 转向阶段航向角测试数据 (°)
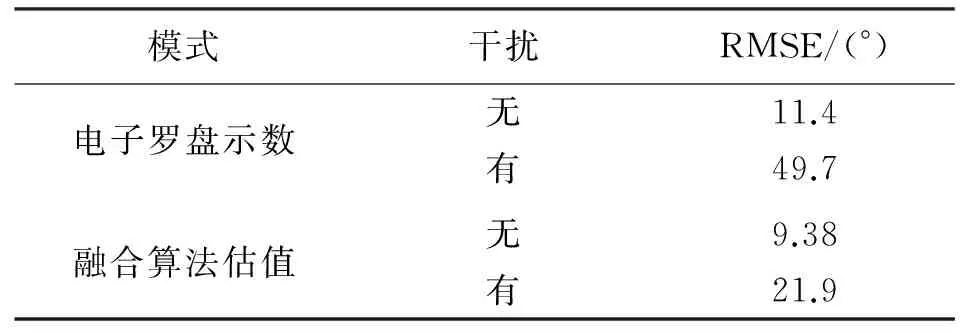
表2 转向阶段航向角标准偏差
调整P值,沿设定路线在不同P值下各重复进行10次试验,用目标转弯节点与参考点之间的相对坐标平均值作为估计结果。表3—表5展示了各P值下的定位结果和标准误差(RMSE)。
由表3—表5可见,不同P值下PDR定位结果偏差很大,但比较稳定,不受阻塞影响。随着P值的减小,GPS定位精度迅速提高,相应的UKF和RC-UKF融合算法定位精度也随之提高,但比较两种算法的RMSE可知,RC-UKF算法的稳定性更好。

表3 P=0.8时不同算法节点坐标估计分析 m

表4 P=0.2时不同算法节点坐标估计分析 m
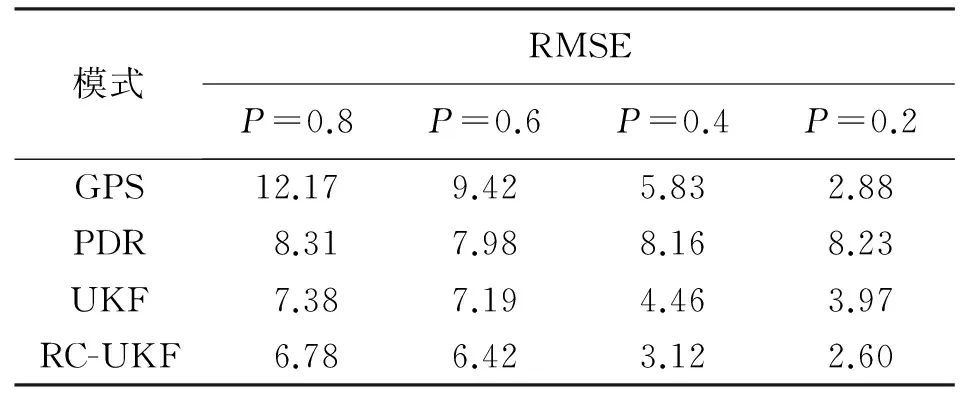
表5 算法坐标估计的RMSE对比 m
表6描述了P=0.05时各种算法的误差分析结果,通过比较发现,RC-UKF算法的标准误差降至1.94 m,标准差0.62 m,具有最高的定位精度。
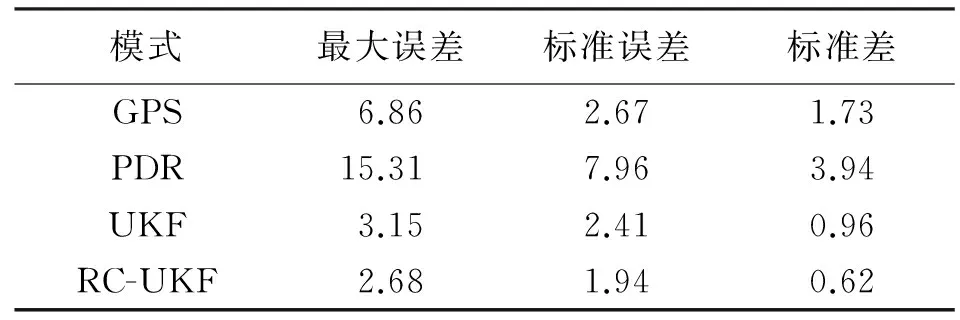
表6 P=0.05时算法误差分析 m
同时,图4展示了P=0.05时各算法的定位结果。可以看出GPS定位基本能显示出完整路径,定位偏差不受运动轨迹形状的影响,比较稳定;PDR定位在起始直行段误差很小,随时间推移逐渐增大,在转弯阶段航向会出现明显偏差,环形轨道的定位结果已严重偏离真实位置。比较传统UKF算法与RC-UKF算法的定位结果,可以看出两种算法均能很好地描绘出行人运动轨迹,但改进算法在突发转弯处的偏离程度更小,在环形轨迹处更贴合真实路径。
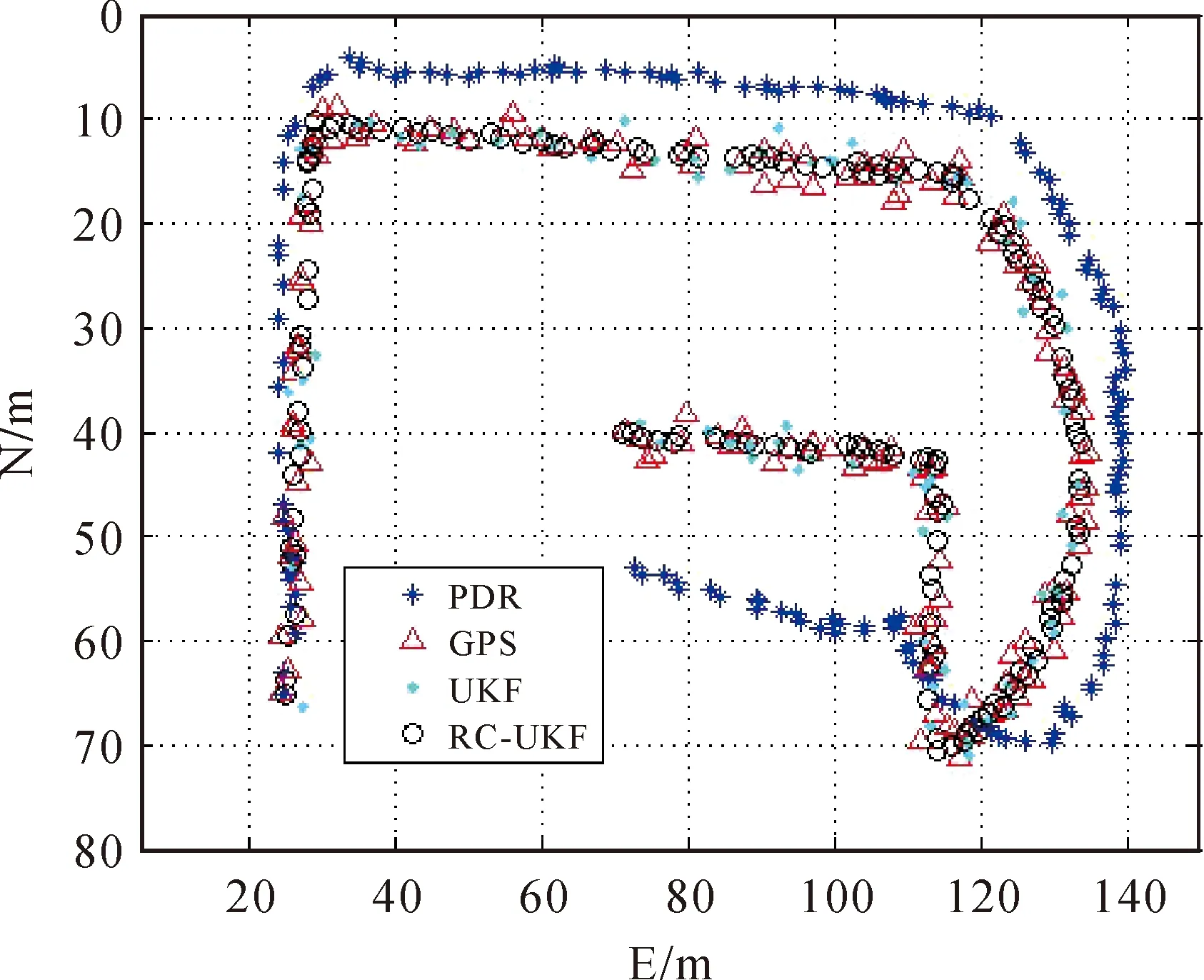
图4 算法性能对比
4 结 语
信号遮蔽环境中,因GPS信号质量变差,其可用性无法得到保障,结合PDR技术辅助定位,可以提供更持续的定位服务。本文提出的改进滤波方法,能提升行人姿态突变或受到外部扰动后的跟踪能力和滤波精度。试验结果表明,改进算法的定位精度更高,定位结果连续性强,具有更好的稳健性。
[1] 白国振, 杨勇明, 李厦, 等. 基于射频识别的智能室内定位系统[J].信息与控制, 2013, 42(3): 364-370.
[2] 唐健,戴廷煜,袁细保,等.RFID,GPS和GIS技术集成在物流配送系统中的应用研究[J].测绘通报,2007(10):47-49.
[3] FARID Z, NORDIN R, ISMAIL M. Recent Advances in Wireless Indoor Localization Techniques and System[J]. Journal of Computer Networks & Communications, 2013(42): 15-17.
[4] 李艳,管斌,王成宾,等.电子磁罗盘航向角误差推导及分析[J].仪器仪表学报,2013,34(7):1566-1572.
[5] CHEN Z, ZOU H, JIANG H, et al. Fusion of WiFi, Smartphone Sensors and Landmarks Using the Kalman Filter for Indoor Localization [J]. Sensors, 2015, 15(1): 715-732.
[6] 钱伟行,朱欣华,苏岩.基于足部微惯性/地磁测量组件的个人导航方法 [J].中国惯性技术学报,2012,20(5): 567-572.
[7] JULIER S T, UHLMANN T K, DURRANT-WHYTE HF. A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators [J].IEEE Transactions on Automatic Control, 2000, 45(3):477-482.
[8] ADAK M, SOARES C G. Effects of Different Restraints on the Weld-induced Residual Deformations and Stresses in a Steel Plate [J]. The International Journal of Advanced Manufacturing Technology, 2014, 71(1): 699-710.
[9] ZHOU W D, QIAO X W, JI Y R, et al. An Innovation and Residual-based Adaptive UKF Algorithm [J]. Journal of Astronautics, 2010, 31(7): 1798-1804.
[10] 陈伟. 基于GPS和自包含传感器的行人室内外无缝定位算法研究 [D].合肥:中国科学技术大学,2010.
[11] 马宏阳,程鹏飞,王潜心.一种改进的 UKF 算法在捷联惯导初始对准中的应用[J].测绘通报,2015(7): 18-22.
[12] SIMON D, SIMON D L. Aircraft Turbofan Engine Health Estimation Using Constrained Kalman Filtering [R]. USA:NASA,2003.
[13] 徐伟.基于Android手机的室内定位技术研究与实现[D].武汉:华中师范大学,2014.
[14] 田增山,朝磊,邢培基,等.行人导航系统中航迹推算参数估计方法的研究[J].电子技术应用,2009, 35(12):84-87.
[15] 黄旭,王常虹,伊国兴.利用磁强计及微机械加速度计和陀螺的姿态估计扩展卡尔曼滤波器 [J].中国惯性技术学报, 2005, 13(2): 27-30.
An Integrated Positioning Method for GPS+PDR Based on Improved UKF Filtering
NIU Huan,LIAN Baowang
(School of Electronics and Information, Northwestern Polytechnical University, Xi’an 710072, China)
In view of the deterioration of
signal quality, an improved GPS+PDR fusion positioning system applicable for signal shielding environment has been proposed. This method uses gyro integrating data within short time to correct heading deviation of digital compass, which has eliminated the incidental interference for digital compass to some extent significantly. UKF (unscented Kalman filter) algorithm used for constraining residual has been adopted to make fusion treatment for GPS and PDR positioning information, which has got over the position drift problem produced by cumulative heading error in PDR positioning effectively and improved the positioning accuracy and stability of algorithm. Experimental results show that the improved algorithm can restrain the drift error of digital compass effectively and the relative heading error has decreased by 56% on average. During walking, the standard error of GPS positioning is 2.67 m and the standard error of pure PDR positioning is 6.83 m. GPS data in several points have been offered randomly to assist positioning, the standard error decreased to 3.12 m. With GPS and PDR positioning integrated in the whole process, the standard error can be decreased to 1.94 m.
GPS; PDR; integrated navigation; multi-sensor data fusion; accuracy; UKF
牛欢,廉保旺.一种基于改进UKF滤波的GPS+PDR组合定位方法[J].测绘通报,2017(7):5-9.
10.13474/j.cnki.11-2246.2017.0213.
2017-03-13
国家自然科学基金(61301094);西北工业大学研究生创意创新种子基金(Z2017027)
牛 欢(1993—),男,硕士生,主要研究方向为多传感器组合导航。E-mail:nih.a@163.com
P228
A
0494-0911(2017)07-0005-05
