基于某新型无人直升机带保护架试飞的分析
2017-08-10张郑源占贞强刘明锜
张郑源+占贞强+刘明锜
摘 要 带保护架试飞是无人直升机试验试飞整个流程中的关键环节,带保护架试飞结果的好坏直接反应无人直升机的性能。本文在某新型无人直升机完成带保护架试飞试验后,运用ORIGIN软件和MATLAB软件对试飞数据进行了详细分析与研究,得出了某新型无人直升机带保护架试飞的结论,即该新型无人直升机各系统状态良好,各传感器工作正常,控制效果满足技术指标要求,可进行后续的试验试飞工作。
关键词 带保护架试飞;无人直升机;试飞数据
中图分类号 V2 文献标识码 A 文章编号 2095-6363(2017)12-0034-02
1 概述
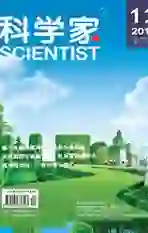
某新型无人直升机采用单旋翼带尾桨式布局,机身主骨架为整体焊接空间桁架结构,滑橇式起落架,旋翼系统采用跷跷板构型,配备1台四冲程活塞式汽油发动机[1],最大起飞重量460kg。航电及任务系统由全静压系统、大气数据系统、无线电高度表,及任务设备:航管应答机、光电侦查设备组成。飞控系统采用自动控制、手动控制和混合控制三种飞控模式[2]。遥控遥测系统将指令发送给机载收发机,并从中接收数据,机载收发机将指令通过串口转发给飞控计算机。该型无人直升机在设计时具有一定的抗风、抗中雨和防尘防沙能力。搭载不同任务设备,该型无人直升机能在适宜飞行的昼夜气象条件下执行如下任务:侦察监视,目标搜索、跟踪、识别,目标指示,毁伤评估,通信中继,雷场探测,海事监控,搜索救援,核辐射侦查,警务执法,农林作业,大气监测,森林防火,电力巡线等。典型任务剖面见图1。
该新型无人直升机先期已完成地面试验,各系统地面试验过程中工作正常,地面试验取得良好效果,下一步进行飞行试验。为保证试飞安全,降低无人直升机试飞时的风险系数,在试飞前必须对该无人直升机进行安装保护架,增大飞机着陆时接触地面的范围,避免试飞时尾桨叶触地(尤其是起飞和着陆时尾桨叶容易触地),以及避免主桨叶在机体进行俯仰和横滚动作时触地。进行带保护架试飞试验有以下试验目的:1)检查该新型无人直升机各系统在飞行时的工作情况,并考核各个系统的工作能力及状态,特别是发动机系统和飞控系统的功能和状态,使全机达到可以进行去保护架试飞的技术状态;2)进一步考核及调整该新型无人直升机发动机参数和飞行控制律参数;3)使飞行操作员掌握该新型无人直升机的飞行特性。
2 保护架安装方案
保护架必须能够在无人直升机试飞时保护机体,避免尾桨叶和主桨叶触地。保护架主要由防护铝管、接头组成。选用4根铝管,在左起落架安装1根铝管,在右起落架安装1根铝管,在前部起落架安装1根铝管,在后部起落架安装1根铝管,保护架通过接头安装至起落架上。该型无人直升机起落架选用了轻型直升机上较为通用的滑橇式,滑橇式起落架具有结构简单、重量轻,便于在雪地、草地和沙漠地带起落的优点。相对轮式起落架阻力可减小约40%以上,且滑橇式易于通过整流而进一步减小阻力。缺点是不能滑跑和不便于地面移动,需专设地面移动轮。
3 试飞内容与数据分析结果
由于该无人直升机之前虽然已经经过长时间的地面试验,但飞行时全机各系统的飞行特性、飞行可靠性和稳定性均无实际飞行经验,为了降低飞行试验风险,采取的试飞科目是带保护架的人工操作无人直升机近地悬停。
1)试验情况:无人直升机按正常流程地面开车至额定状态,无人直升机接入姿态保持、航向保持和位置保持功能,人工操作无人直升机起飞,在10m以内的高度进行近地悬停试飞,之后人工操作无人直升机着陆。无人直升机初始GPS高度为44m,初始航向为215.6°。
2)试验要求:无人直升机姿态(俯仰和横滚)、航向平稳,且位置可控,无人直升机发动机转速控制精度在±150r/min以内(发动机额定工作转速为5 500r/min)。
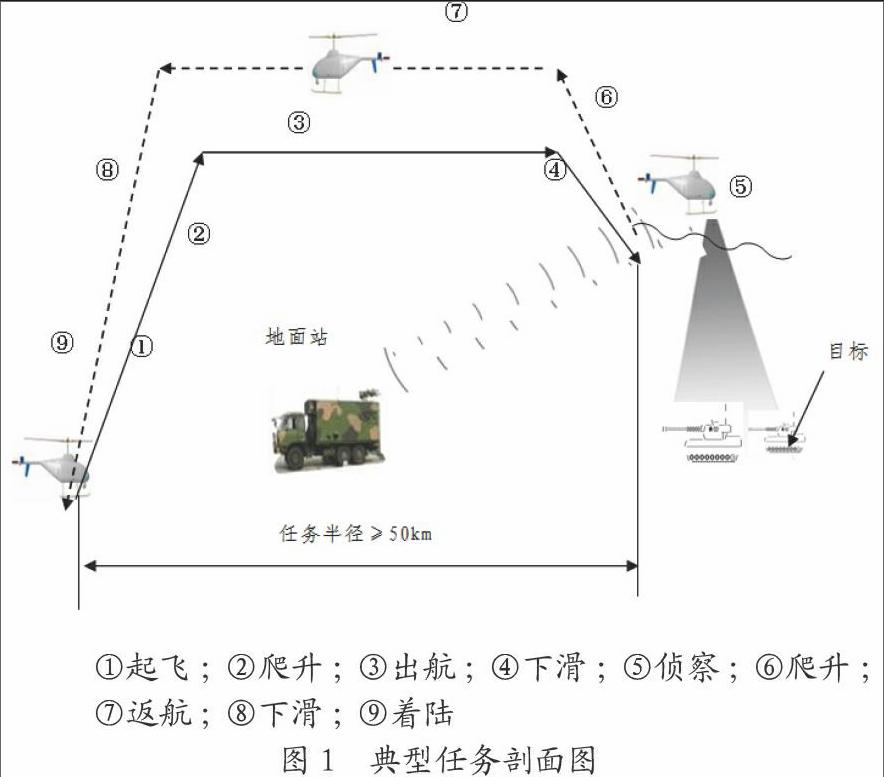
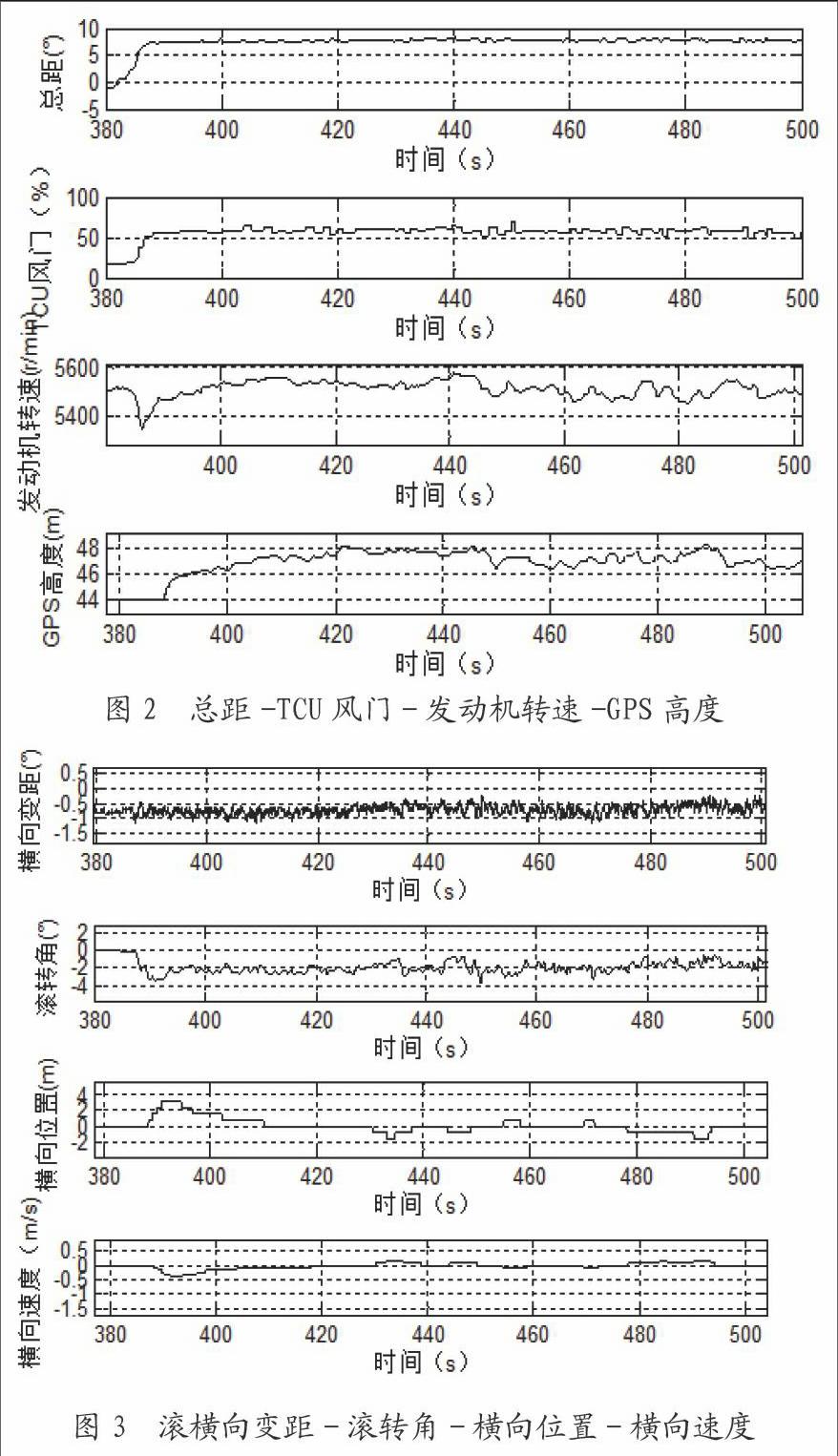
3)试验结果与数据分析:截取发动机开车时间为380s~500s区间的飞行数据,运用ORIGIN软件和MATLAB软件进行分析,分析结果如下(试验数据曲线如图2~图9所示)。人工悬停时,无人直升机总距保持范围:7.3°~8.3°,风门保持范围:49.5%~68.3%,发动机转速保持在:5 455r/min~5 582r/min,GPS高度保持范围:46.4m~48.2m(初始GPS高度为44m);航向保持范围:212.8°~218.4°,航向保持精度为:±2.8°;滚转角保持范围:-3.9°~-0.5°,滚转角保持精度为:±1.7°,横向位置保持范围:-1.5m~3m;俯仰角保持范围:-2.1°~1.3°,俯仰角保持精度为:±1.7°,纵向位置保持范围:0~1.8m;缸头1温度最高104.9℃,缸头2温度最高102.9℃;排1温度最高802.4℃,排2温度最高793.3℃,排3温度最高883.5℃,排4温度最高906.1℃;滑油温度最高97.1℃:滑油压力变化范围4.4bar~5.05bar;主减速器滑油温度最高44.1℃;燃油压力变化范围0.596bar~0.623bar。
4)试验结论:该新型无人直升机带保护架人工近地悬停时,姿态(俯仰和横滚)、航向平稳,位置可控,发动机转速控制精度:-45r/min~82r/min,符合试验要求(±150r/min以内)。
4 结论
通过某新型无人直升机带保护架试飞的验证,发现该新型无人直升机飞控系统控制该新型无人直升机姿态保持、位置保持和航向保持等精度較高,飞行控制效果满足技术指标要求;同时,发动机工作状态正常,转速控制稳定,发动机缸头温度,排气温度,滑油温度正常。飞行操作员操纵该新型无人直升机感觉该无人直升机操纵性较好。同时,该新型无人直升机其他各系统状态良好,传感器工作正常。因此,可拆开保护架,开展后续的试验试飞工作。
参考文献
[1]张呈林,郭才根.直升机总体技术[M].北京:国防工业出版社,2006.
[2]杨一栋.直升机飞行控制[M].北京:国防工业出版社,2007.
[3]孙之钊.直升机强度[M].南京:南京航空航天大学出版社,2011.