基于GPS/BD组合定位方法的车辆轨迹连续性跟踪系统
2017-08-09作者赵昌丽天津中德应用技术大学
作者/赵昌丽,天津中德应用技术大学
基于GPS/BD组合定位方法的车辆轨迹连续性跟踪系统
作者/赵昌丽,天津中德应用技术大学
为保障专属车道畅通,针对车道入侵监测系统开发环节涉及的车辆轨迹连续性跟踪问题,釆用了一种基于GPS/BD组合定位的方式以提高定位精度,在接收信号丢失时采用INS定位推算下一时刻位置,进行了行人手持及车载低速情况下的测试工作,综合定位精度达到0.6m以内,能够满足系统整体监测的需要,验证了组合定位方法在车辆轨迹连续性跟踪系统中应用的可行性与有效性。
车道入侵;轨迹跟踪;GPS/BD;INS
引言
针对车道入侵问题的探讨[1],多见于未来交通管理体系中的自主驾驶无人车辆的导航控制,以及当前交通管理体系中对结构化路面下车辆的车道归属规范,两者所涉及的车道违规甚至非法占用,存在严重安全隐患,解决两者问题的核心在于如何认定车道是否存在入侵。
车道入侵于前者主要指车辆本体主动式的探测行为,以期约束车辆按既定轨迹完成规划路线,而于后者主要涉及高速公路的应急车道管理以及一般性城市结构化路面近路口处的车道管制,为车辆本体外系统对车道的监测行为。两者的共性核心问题在于对车辆轨迹的实时准确监测,通常在该环节采用的单点GPS定位精度不高,而差分GPS在成本及面向移动作业时受到局限[2—4]。本文采用了GPS/BD双单点定位方式,为解决该问题提供一种可行探讨。
1. 系统总体设计
硬件系统模块利用串口与其他模块相连,该系统采用独立化的模块设计思路,各个模块能够独立设计、独立调试,互不影响,组成如图1所示。当卫星信号良好,GPS/BD模块负责提供卫星定位信息,当卫星信号低于阈值时,由MPU6050模块来提供惯导信息,定位信息由串口送至处理器模块进行信息处理后重新编制为符合GPRS协议的数据包,最后通过GPRS模块被发送至监控中心从而实现对车辆的定位[5,6]。
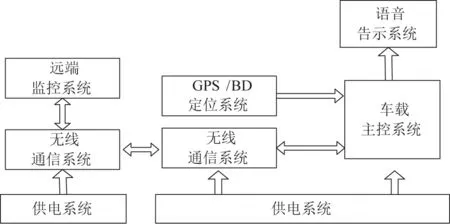
图1 系统组成框图
2. 定位相关系统硬件设计
定位系统模块生产厂家很多,同一厂家型号也各有不同。例如U—blox公司,其就以生产的定位系统精度高,冷启动速度快,用户体验好著称,本系统采用的便是该公司生产的芯片。以定位为目的的芯片型号就有U—blox 6m、U—blox neo 7M、U—blox m8n等型号。本系统采用的是该公司最新生产的定位系统U—blox m8n,其兼具GPS和北斗两种模式。可以按照用户自己的要求配置任一种模式。该模块供电电压为2.8V~6V,符合本系统5V的供电电压。功耗为50mA,功耗水平低能够增加本系统的续航时间。水平定位精度在2m之内,输出频率为1Hz,基本满足系统设计的各项指标。本系统主要采用GPS/BD数据相融合的定位系统,提高了定位精度,弥补了单GPS或者单BD定位误差大、数据易漂移的缺点,模块如图2所示。

图2 定位模块
系统主控制器采用STM32F系列32位ARM微控制器,其内核是Cortex—M3。片内Flash的大小为512K。芯片集成定时器,CAN,ADC,SPI,I2C,USB,UART,等多种功能。根据系统功耗低、体积小、电压一致等的要求,本系统选择了大唐联芯LC5730型号的无线通信模块。
3. 系统软件设计
系统主要对车道数据进行采集,通过网络将采回的数据进行上传,终端上位机实时显示车辆位置信息,系统框图如图3所示。第一步,主控芯片读取GPS与BD的经纬度坐标。第二步,计算两者经纬度的距离差。第三步,判断误差范围是否小于20cm,如果小于20cm,则对两者进行差分运算,得到较为精确的经纬度坐标,作为判断车辆是否占用应急车道的依据。如果经纬度距离差大于20cm,而应急车道的宽度为2.5m,通过计算得到,误差比为16%,远低于系统设计要求的10%,说明两者的经纬度坐标是不可信的,此时主控芯片读取MPU6050的加速度、角度等状态信息,以及GPS/BD上一时刻的经纬度信息,推算出这一时刻车辆所在的经纬度坐标。第四步,判断车辆是否进入应急车道,如果没有进入应急车道则回到第一步继续执行,如果进入应急车道,记录占用应急车道的时长,超过10分钟后,进行声光报警,并将占用时长、经纬度坐标等信息发送给远端上位机。

图3 系统工作流程图
4. 实验验证与分析
系统测试验证主要通过手持系统测试与车载系统测试两部分组成,手持状态下从定点的误差分析以及连续点的误差分析两方面测试主要目的有:
(1)验证车辆连续性轨迹跟踪的方案可行性;
(2)验证连续性轨迹跟踪的精度是否达到设计要求。
为了测试本系统室外手持连续轨迹跟踪方案的可行性,由操作人员携带终端设备以1m/s的速度以“S”型曲线路线进行运动,在此运动过程中,我们在每隔1m抽取1个点,按此方式执行5次,行进轨迹数据及对比如图4所示。
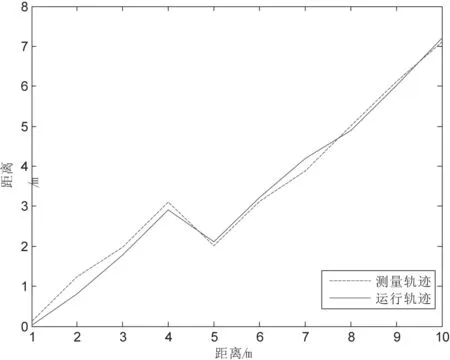
图4 手持测试数据对比及误差
能够看出,当携带终端设备的人员按照基准线行进时,实际测量值是是在基准线附近波动的,在前8m的范围内实际行走轨迹与设备获取的数据轨迹之间的误差范围在0.6m之内,连续性轨迹跟踪能够达到系统整体监测的任务需求。
车载状态下的系统测试,主要是验证系统实际使用的可行性,模拟车辆在结构化公路中的运行状态,测试车辆运行过程中车辆轨迹跟踪系统的方案可行性。
1.2.1 病房环境要求:干净、安静、舒适、安全。在各部门的检查中,病房环境管理常常是不符合规范化要求。探讨其中的原因如下:
车载测试选择了1km距离的结构化路段作为测试场所,由运行车辆携带终端设备以16m/s的速度以“S”型曲线路线进行运动。移动端实时上传采集的数据,上位机监控软件实时监控车辆位置信息。在此运动过程中,我们在每隔100m抽取1个点,按此方式执行4次,数据如图5所示。

图5 车载实验数据及对比误差
能够看出,当携带终端设备的车辆按照基准线行驶时,实际测量值是是在基准线附近波动的,在前50m的范围内实际运行轨迹与设备采集到的数据轨迹之间的误差范围在1m之内,而在50m~70m之间,有小幅波动。
5. 结语
本文针对车道入侵问题,主要涉及车辆连续性轨迹的跟踪问题开展了研究工作,对GPS/BD双单点定位系统数据进行了信息融合,在两者定位给值偏差超出约定阈值的情况下,以来源于惯性测量组件的数据进行推算估计予以校正,经过行人手持及车载低速实验,初步验证了该组合定位方法的有效性及环境适用性,所设计的车辆轨迹连续性跟踪系统整体表现良好。
* [1]刘超.城市车辆实时监视系统的定位方法及信息传输技术研究[D].中国科学院研究生院(国家授时中心),2012.
随着酒店业竞争加剧,酒店之间在客户资源的争抢上也愈发激烈,导致酒店的利润空间不断被压缩。张潇潇(2103)指出必需将更加行之有效的信息化管理运用于酒店的管理中,对酒店的经营空间进行广泛的开拓,实现运营成本的进一步降低。其认为酒店管理系统的合理运用,不仅可以对大量的信息进行有效的管理,还可以将先进的管理观念引进来,从而不断地推动工作效率及服务质量的提升,实现酒店内部管理体制的不断完善,提高酒店决策水平、经济效益以及关系效益,最终实现酒店竞争力的提升[9]。
* [2]何正斌.GPS/INS组合导航数据处理算法拓展研究[D].长安大学,2012.
* [3]孟祥先.基于GPS和RFID技术的列车组合定位方案设计及数据处理方法研究[D].兰州交通大学,2014.
* [4]刘进一,杜岳峰,张硕,等. 基于GNSS/MIMU/DR的农业机械组合导航定位方法[J].农业机械学报,2016.
* [5]林英杰,李东杰,梁光静,等. 基于FPGA的快速车道偏离预警系统硬件实现[J].电子科技,2016.
* [6]汪亮,李子申,袁洪,周凯.BDS/GPS/GLONASS组合的双频单历元相对定位性能对比分析[J]. 科学通报,2015.
