船舶直流电力系统建模与仿真
2017-08-08薛士龙张亚明陈文秀
孙 磊, 薛士龙, 张亚明, 陈文秀
(上海海事大学 物流工程学院, 上海 201306)
船舶直流电力系统建模与仿真
孙 磊, 薛士龙, 张亚明, 陈文秀
(上海海事大学 物流工程学院, 上海 201306)
根据船舶直流电网的组成,分析了柴油机(原动机)调速系统、同步发电机励磁系统和三相整流模块,并在此基础上建模。利用Matlab/Simulink建立仿真模型,在发电机空载、稳定带载、突变负载情况下进行仿真实验。仿真结果表明,在加、减负载时船舶直流电力系统具有稳定性。
船舶直流供电系统; 建模; Matlab/Simulink; 恒速柴油发电机
随着船舶工业的不断进步和电力电子器件的发展,船舶直流电力系统重新进入科研人员的视野[1]。目前,中压直流电力系统为船舶直流电力系统的热门研究方向[2]。
船舶直流电力系统具有很多优点[3],如:易于集成不同类型的电源,增强船舶的可配置性;取消了主、交流配电板,减少了无功功率; 提升效率、经济环保等。船舶直流电力系统可以实现发电机与原动机之间的转速解耦,柴油机能够变速运行;随着柴油机变速运行的出现,其最优效率窗口可以根据柴油机速率的变化而变化,从而可以节省燃油消耗,提高经济效益[4]。
建模与仿真是科学研究的强有力手段。本文在3种情况下,对船舶直流电力系统进行建模。数学模型包括柴油机、发电机、推进器和整流逆变等单元;使用Matlab/Simulink作为仿真平台,对船舶直流电力系统进行仿真。
1 船舶直流电力系统结构
图1所示为船舶直流电力系统的基本结构。由图可见,船舶直流电力系统由发电系统、能量存储系统、负载系统和直流分布系统组成。
原动机(一般为柴油机)与同步发电机组成的发电系统为全船提供电力。发电机组发出的交流电经整流后,变成1 kV直流进入直流分布系统,再经过逆变等环节传送给用电负载。
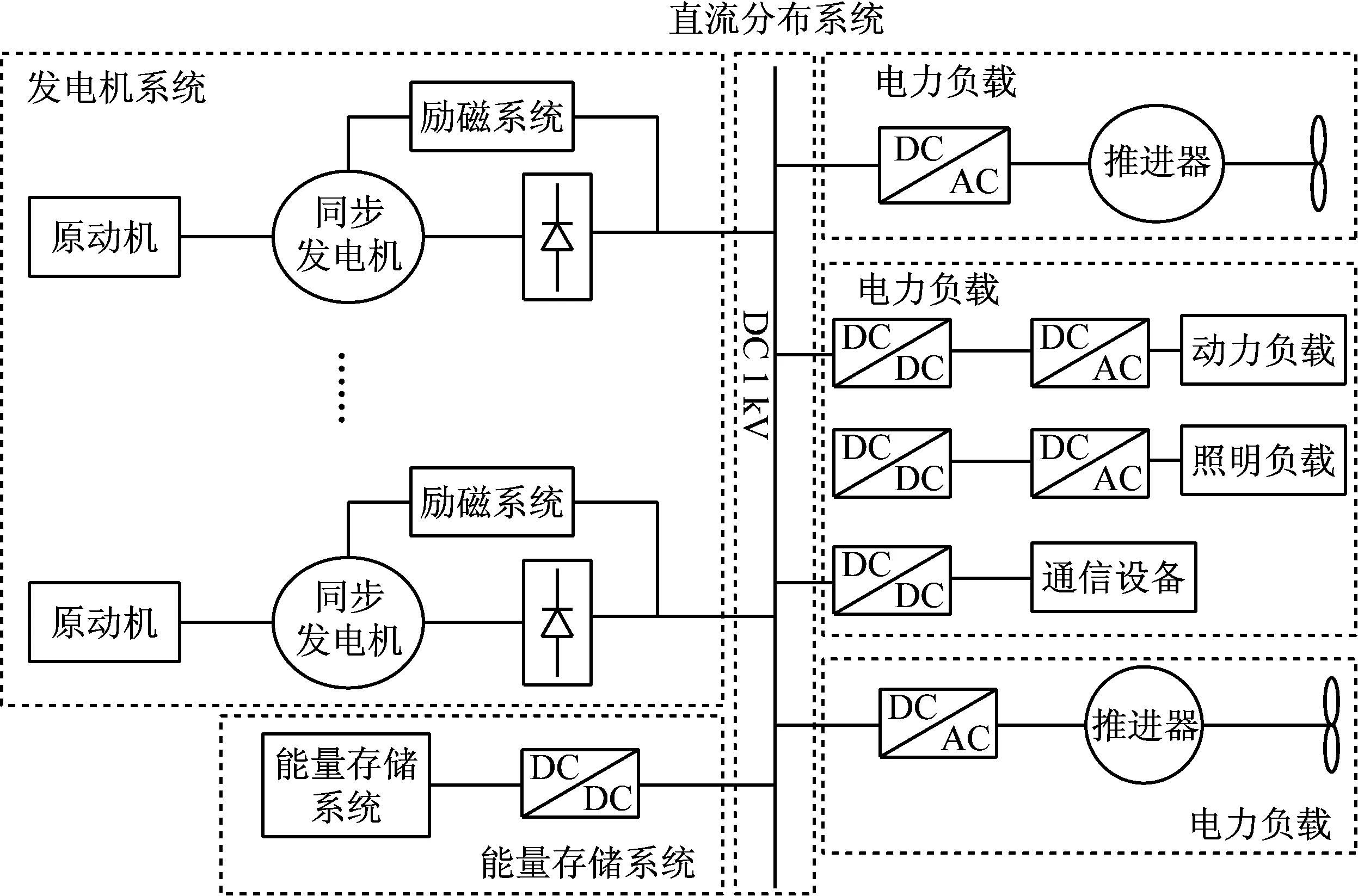
图1 船舶直流电网结构框图
当推进器起停、负载突然变化或因电网故障而造成电网波动时,由能量存储单元抑制电网波动,提升电网的稳定性。能量存储系统由DC/DC变换器和储能设备(超级电容或锂电池等)组成。
负载是将电能转换成其他形式能量的装置,又称用电设备。船舶上的用电设备很多,主要有动力负载(各种电力拖动机械)、照明负载、通信设备等。
直流分布系统是全船输电电缆及其结构组成的总称,其作用是将电能送给全船所有的用电设备。
由于船舶直流电力系统不同于传统的船舶交流电力系统,在对其进行建模、仿真前,需要对船舶直流系统的特性加以分析,对于不同的器件或设备,要根据其特性采用不同的建模方法,也要考虑各系统之间的相互作用[5]。
2 船舶直流电力系统建模
本文建立的船舶直流电力系统仿真模型共有3个部分组成:(柴油机)发电系统、负载系统、电力电子系统。其中,发电系统模型包括原动机、发电机-励磁系统模型;电力电子系统模型包括DC/AC、DC/DC变换器等模型。由于柴油机作为原动机,仿真时旨在模拟船舶柴油机转速变化趋势,故本文所建模型未考虑能量存储系统。
2.1 发电系统
柴油发电机组包含柴油机及其转速控制系统、同步发电机及其励磁系统两部分。柴油机及其转速控制系统为发电机提供原动力,并在负载发生变化时,通过改变燃油喷射量来改变柴油机转速,在一定负载变化范围内保证发电机的转速稳定[6]。励磁系统控制同步发电机的磁场电流,使得发电机输出功率在额定容量内连续变化时能维持端电压稳定,进而提高运行的稳定性。图2为柴油发电机组结构框图[7],其中,Pm为柴油机输出功率,ω为转速,Uf为励磁电压,U为发电点电压,I为发电机电流。
2.1.1 柴油机及其转速控制系统 该系统由柴油机、调速器等组成。图3为船舶柴油发电机组系统
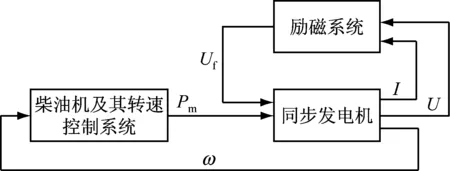
图2 柴油发电机组结构框图

图3 船舶柴油发电机组转速控制系统结构图
结构图,其中,ωref为给定转速。
(1) 柴油机。柴油机通过改变燃油喷射量来改变其转速。当负载功率一定时,柴油机调节供油量使其输出功率与负载功率平衡,此时,柴油机在一定转速下稳定运行;当负载变化时,柴油机改变其转速达到新的稳定状态[8]。本文利用时间常数τc和延迟时间τ对柴油机建模[9]如下:
式中,Tm为输出转矩;Ky为转矩常数;Y为燃油指数(调速器设置);nm为柴油机转速,r/s;N为气缸数;s为复变量。
(2) 调速系统。船舶发电机组中的原动机不同,调速器的类型与特性也不同。调速器将油门位置的电压信号转换成油泵刻度齿条的实际位置,从而将此控制过程转化为对实际喷油量的调节,以达到调节柴油机转速的目的。调速系统包括转速传感器、控制器和执行器等部件[10]。本文建立了调速系统各部分的数学模型。
转速反馈环节的传递函数为

(4)
式中,Uf为反馈电压;n为原动机转速;K1为转速反馈环节的增益。
控制环节的传递函数为
(5)
式中,输出量I(s)为控制执行器动作的控制电流;输入量en(s)为给定电压与Uf的差值;K2为比例系数;T1为积分时间常数;T2为微分时间常数。
执行器的传递函数为
(6)
式中,L(s)为调速器输出轴位移;K3为增益;T3为执行器的时间常数。
将柴油机与调速系统的模型联合起来,即可得到船舶柴油机及其转速控制系统的数学模型,即
G(s)=

(7)
式中,K、T4、T8分别为控制器放大系数、时间常数、二阶环节的时间常数;T6、T7、T8为柴油机及其执行器的时间常数;ξ为阻尼比。
柴油机及其转速控制模型框图如图4所示。
2.1.2 同步发电机及其励磁系统 同步发电机是将机械能转换成电能、给全船供电的设备。其模型复杂,数学建模工作量大且不够清晰。本文在仿真时采用Simulink模块中已经封装好的同步发电机模型。
目前,船舶同步发电机励磁系统大多采用的是可控相复励无刷励磁系统[11]。可控相复励无刷励磁系统由相复励装置、交流励磁机和自动调压装置(AVR)等元件组成[12]。图5所示为可控相复励无刷励磁系统结构框图。

图4 柴油机及其转速控制模型框图
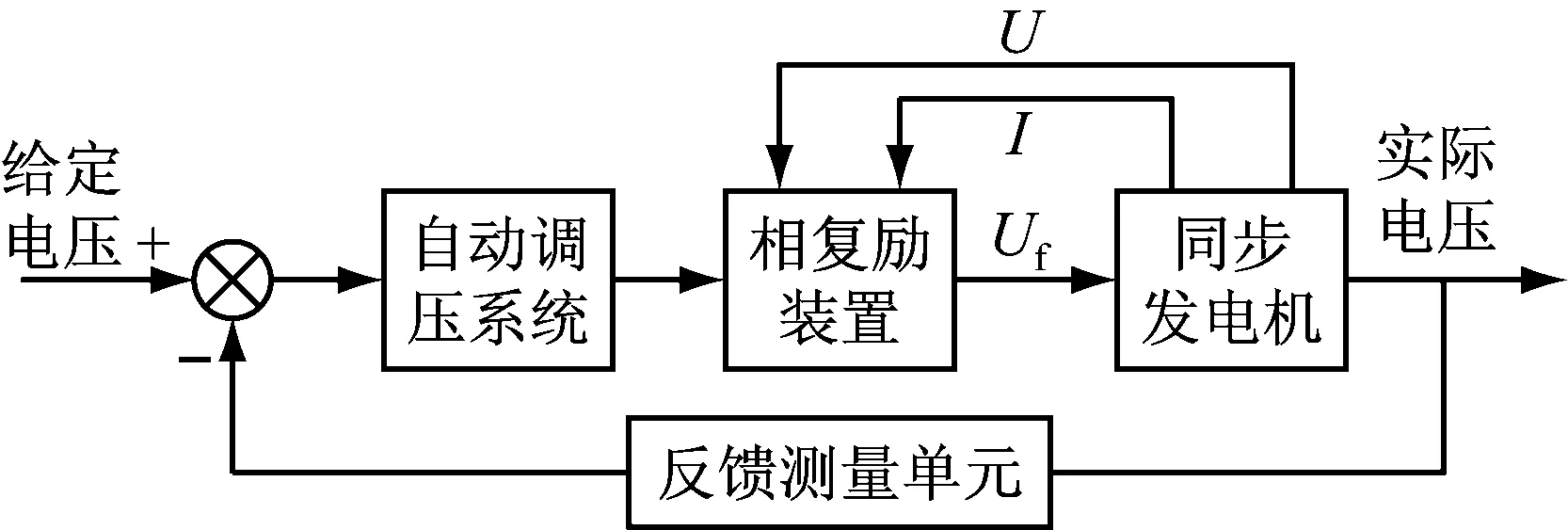
图5 可控相复励无刷励磁系统原理图
Fig.5 Schematic diagram of a controlled-phase compound excitation brushless excitation system
发电机励磁系统模型建模框图如图6所示。图中,Uref为输入电压设定参考值,Ud、Uq为发电机d、q轴电压,is_qd为发电机的三相交流信号,Ustab为接地零电压。Ud、Uq通过dq轴电压与功率因数投影计算,再通过低通滤波产生相复励的电压信号。三相交流信号is-qd通过与功率因数进行计算,再通过低通滤波,产生相复励中的电流信号。
这两部分信号合成后,一部分送入调节器回路进行闭环调节,另一部分再与调节器的输出产生比例作用,最后输出到励磁机。
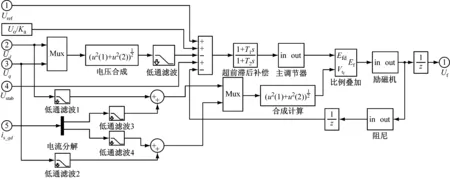
图6 船舶发电机励磁系统模型方框图
发电机励磁系统前向回路的传递函数为

(8)
反馈单元的传递函数为
G5(s)=kfs/(tfs+1)
(9)
式中,Ka和ta分别为主调节器的放大倍数和时间常数;tb和tc分别为进行超前与滞后补偿的时间常数;kf和tf分别为反馈阻尼环节的放大系数与时间常数;Ke、te为励磁机特性系数和时间常数。
励磁系统最终实现的控制为PID调节,其中主调节器与补偿器在前向回路中;实际微分环节在反馈回路中起到对系统的阻尼和稳定作用。
2.2 整流单元AC/DC
目前在各种整流电路中,应用最为广泛的是三相桥式全控整流电路,其原理如图7所示。一般将其中阴极连接在一起的3个晶闸管(VT1、VT3、VT5)称为共阴极组,阳极连接在一起的3个晶闸管(VT2、VT4、VT6)称为共阳极组。按此编号,晶闸管的导通顺序为VT1—VT2—VT3—VT4—VT5—VT6。
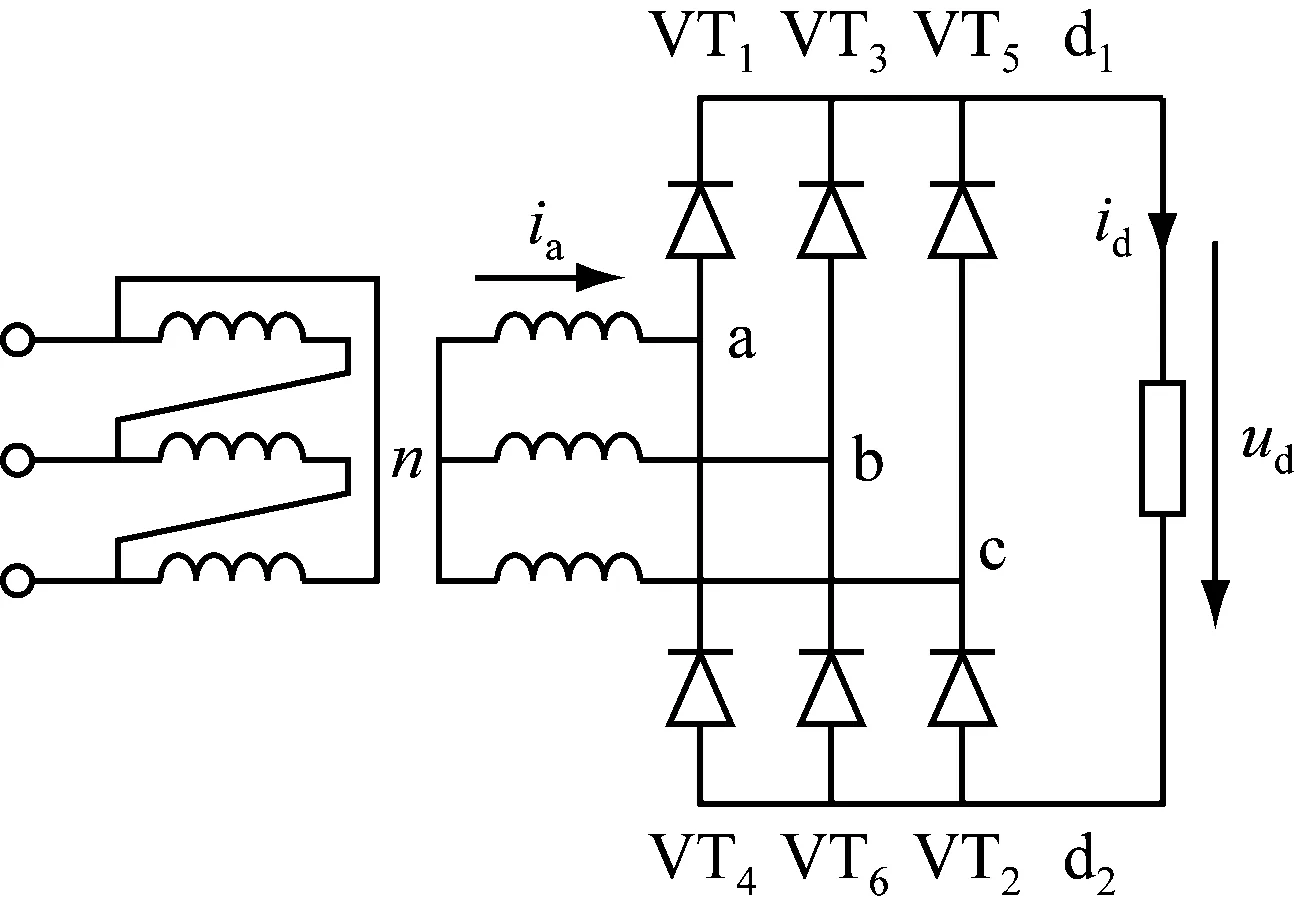
图7 三相桥式全控整流电路原理图
本文在导通角α=0°时进行仿真。当α=0°时,各晶闸管均在自然换相点处换相。各自然换相点既是相电压的交点,同时也是线电压的交点。此时,对于共阴极组的3个晶闸管,阳极所接为交流电压值最高的一个导通;而对于共阳极组的3个晶闸管,则阴极所接为交流电压值最低(或负得最多)的一个导通。这样,任意时刻共阳极组和共阴极组中各有1个晶闸管处于导通状态,施加于负载上的电压为某一线电压[13]。
3 系统仿真
基于上述对船舶直流电网各部分的分析,在Matlab/Simulink中建立仿真模型如图8所示。本文在搭建负载仿真模型时采用直流电阻负载。

图8 带直流电阻负载的船舶直流电网仿真模型

三相桥式全控整流电路导通角α=0°。负载模型参数:P=200 kW。为仿真方便,负载简化为相同功率的阻抗。
图9给出了α=0时晶闸管触发脉冲波形图,晶闸管的导通顺序为VT1—VT2—VT3—VT4—VT5—VT6。
基于上述参数及仿真模型,分别在发动机空载、稳定带载、突变或突加负载情况下对船舶直流电力系统进行仿真实验。

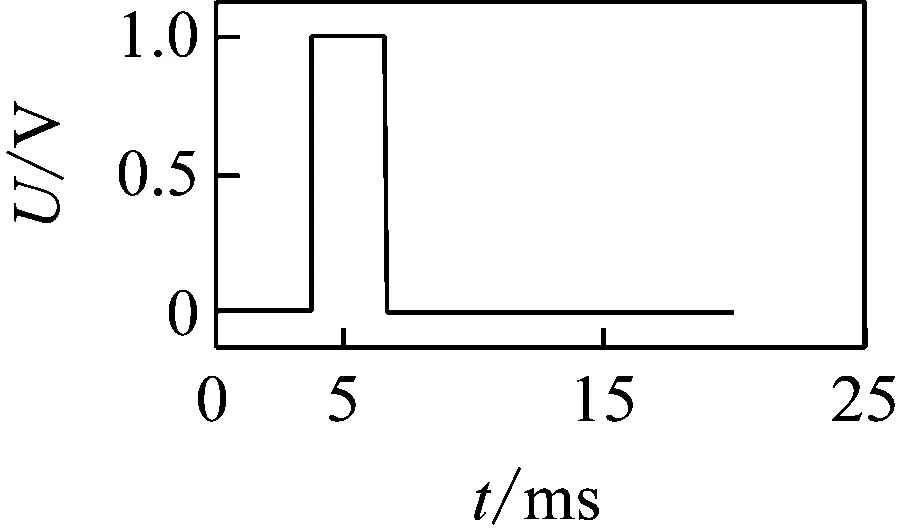
(a) VT5 (b) VT2

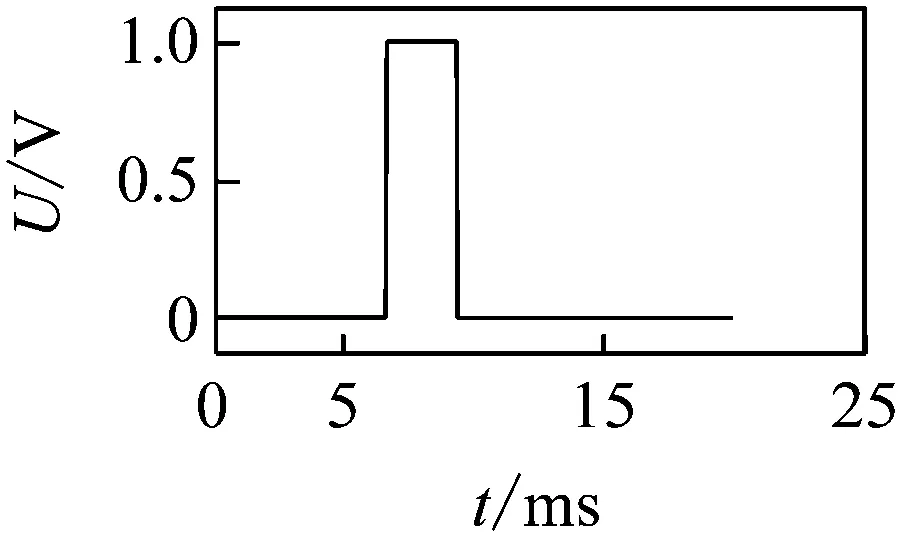
(c) VT6 (d) VT3

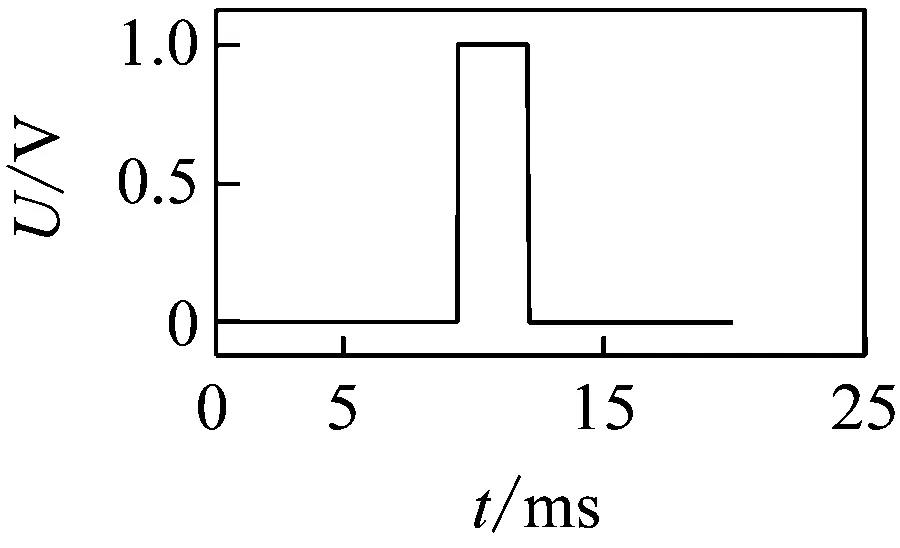
(e) VT1 (f) VT4
(1) 发电机空载运行。发电机空载运行时,可得到如图10所示的发电机转速、电流、端电压曲线。
由图10可知,发电机空载运行时,发电机转速稳定,标么值为1,且空载电流为0 A;在刚启动时,端电压有所上升,运行约1.5 s后,端电压达到稳态值,标幺值为1。上述仿真结果表明了本文所建立的发电机系统模型是正确的。
(2) 发电机带有稳定负载。当发电机稳定带载时,得到图11所示的发电机输出功率、励磁电压、转速及负载端电压曲线。由图可见,发电机启动约2 s后,直流负载两端电压可以稳定在DC 1 kV。仿真结果表明,在稳定负载情况下,建立的船舶直流电力系统模型可以快速达到直流母线电压。
(3) 突变或突加负载。按照以下设置进行仿真:设柴油机转速为恒定值,当t=5 s时突加负载,在t=10 s时突减负载。图12给出了发电机突加、突减负载时,发电机转速和负载端电压变化曲线。
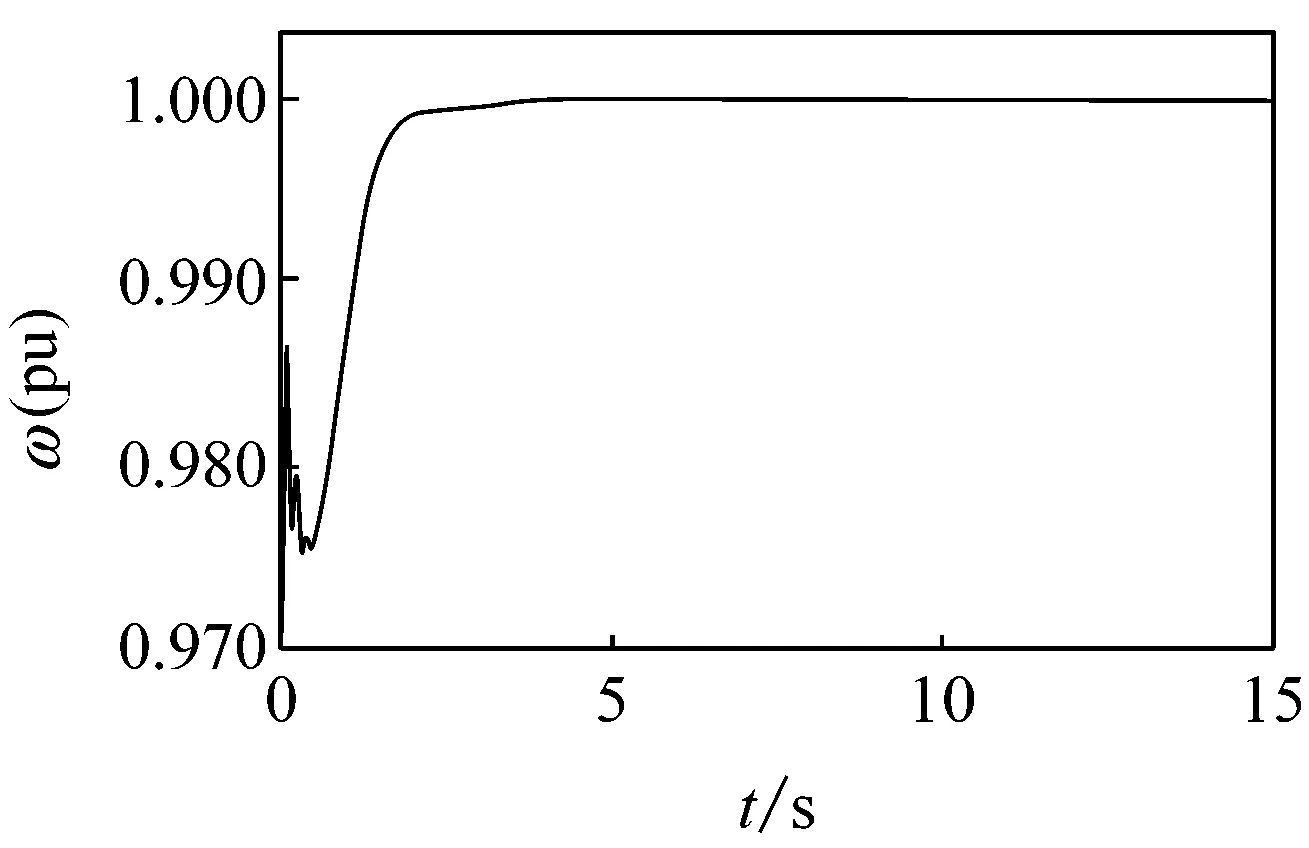
(a) 转速
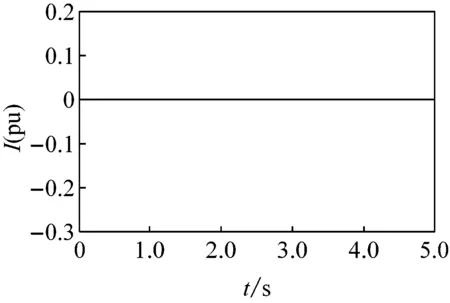
(b) 电流
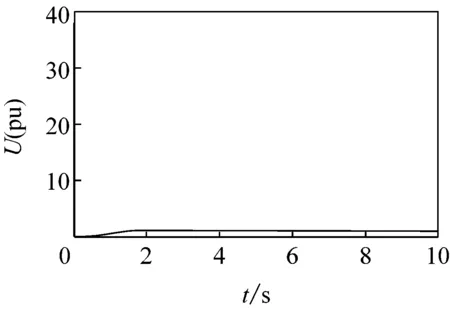
(c) 端电压
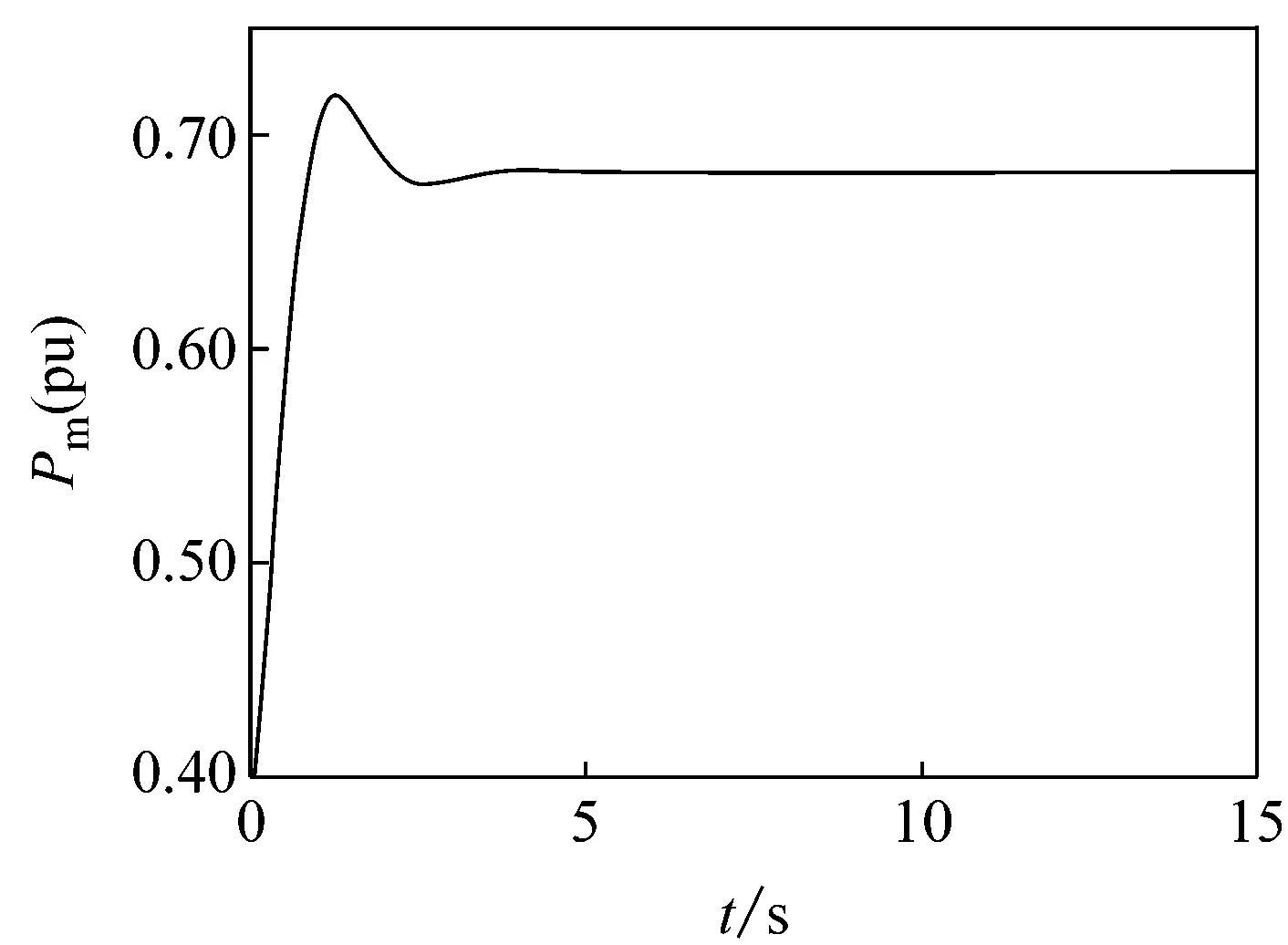
(a) 发电机输出功率
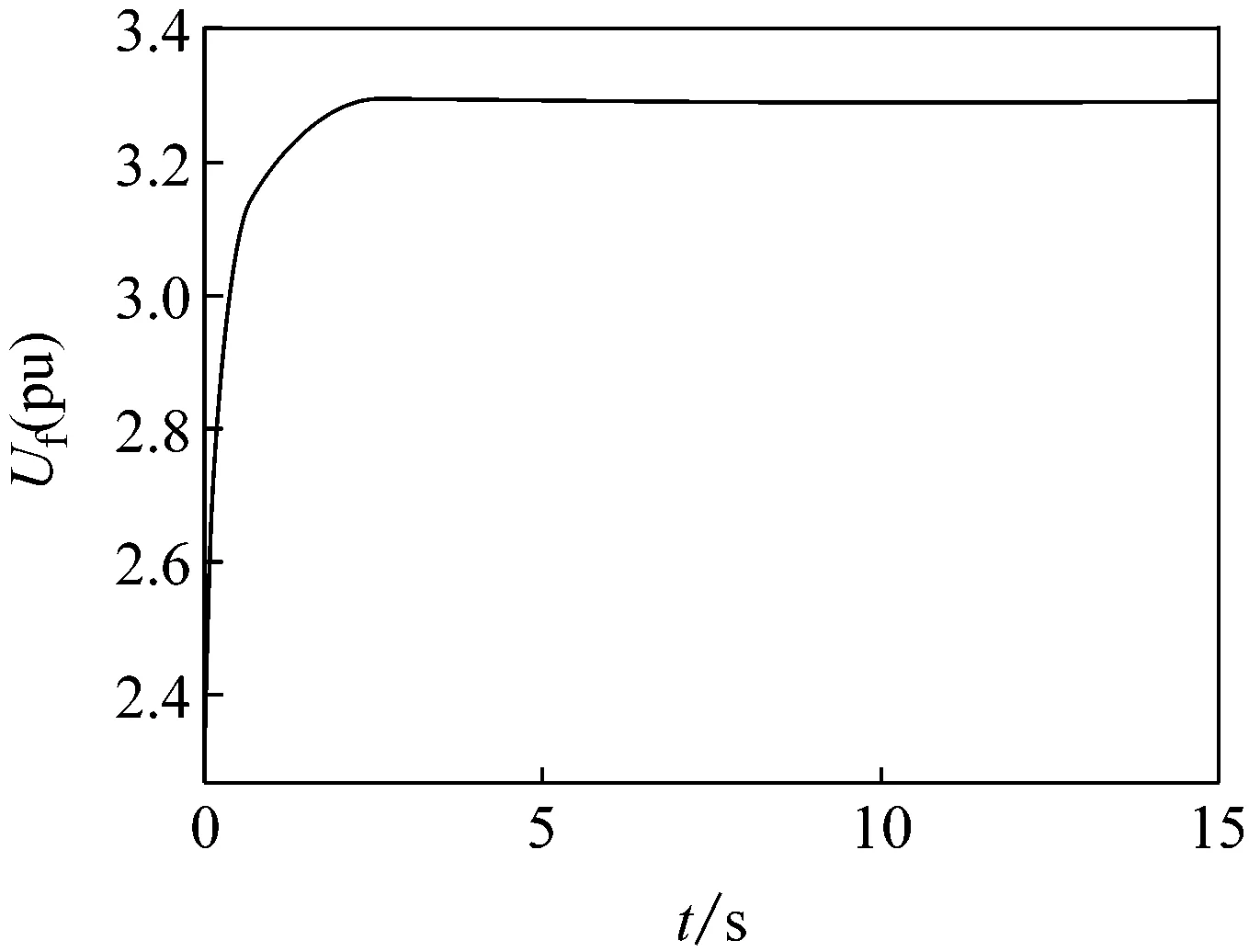
(b) 发电机励磁电压

(c) 发电机转速

(d) 负载端电压
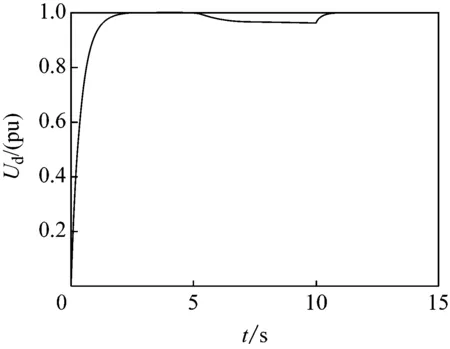
(a) 发电机转速
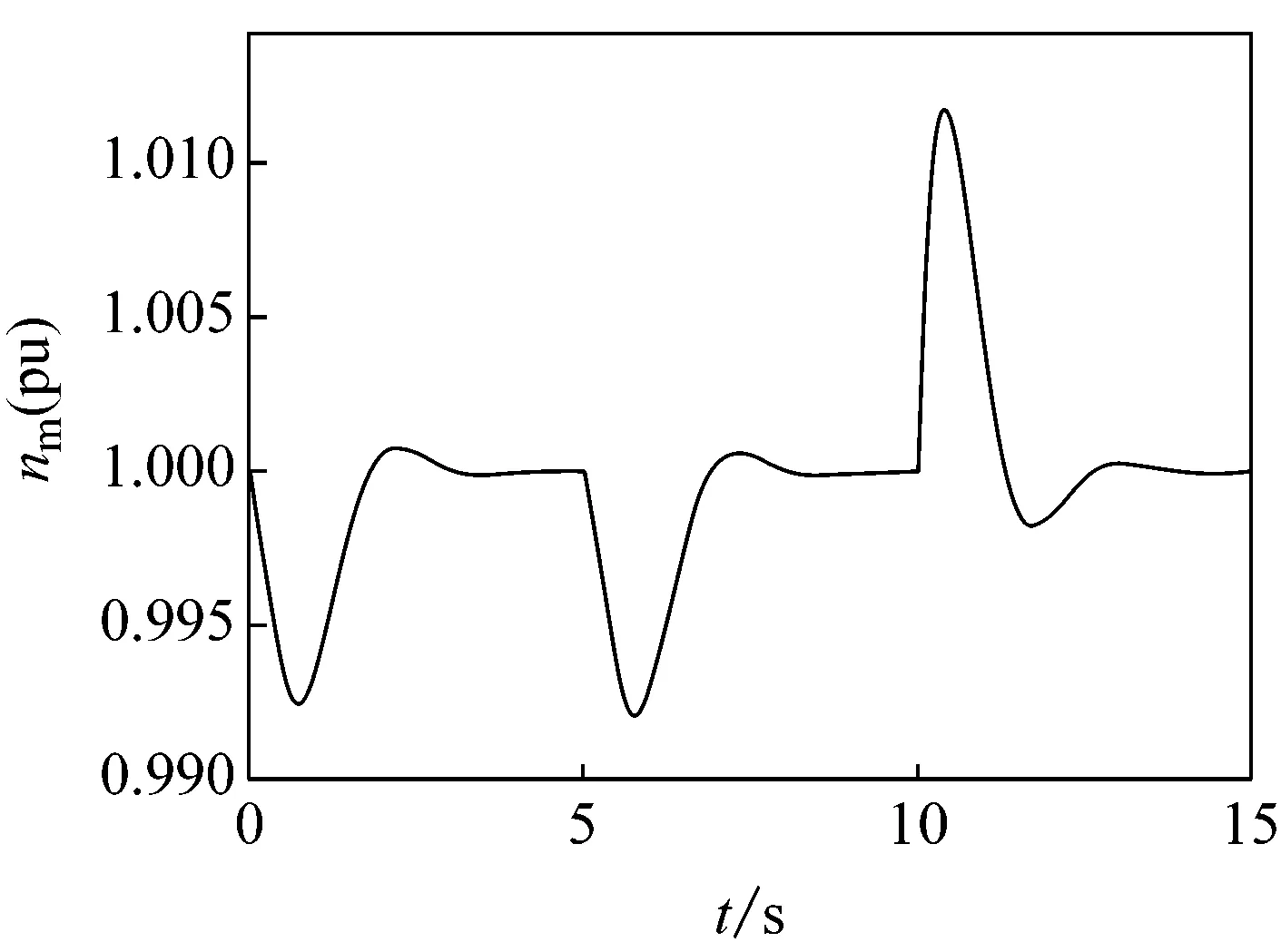
(b) 负载端电压
由图12(a)可见,当t=5 s突加负载、t=10 s突减负载时,发电机转速迅速减少和增加,但很快又回到了设定值。由图12(b)可见,当t=5 s突加负载时,负载两端电压有所下降,并保持了稳定,但不能回到母线电压DC 1 kV;而当t=10 s突减负载后,负载两端电压才又回到了母线电压DC 1 kV。这说明船舶直流电网在变负载运行时,柴油发电机组恒速运行不能提供稳定的母线电压,在变负载运行时,需要变速运行。
4 结 语
本文在分析船舶直流电网系统组成的基础上,对船舶直流电网在Matlab/Simulink平台下进行建模并在3种不同情况下进行仿真,得到了相应状态下的船舶直流电网电压、转速等曲线。研究结果表明,在柴油发电机组恒速运行时,经过整流滤波环节后,船舶直流电网可以提供稳定的DC 1 kV电压,满足船舶电力负载的需要;当负载发生变化时,负载电压将发生一定的波动,不能稳定在DC 1 kV,而柴油机转速能够稳定在设定值。
下阶段的工作将研究在复杂工况下,柴油机转速不再保持在稳定的设定值、负载功率突然变化时,如何调节柴油机转速,保证船舶直流电网母线电压的稳定在DC 1 kV。
[1] THONGAM J S, TARBOUCHI M, OKOU A F, et al. All-electric ships—A review of the present state of the art [C]// 2013 8th International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER). Monte-Carlo: IEEE, 2013: 1-8.
[2] WOOD A J, WOLLENBERG B F. Power generation, operation, and control [M]. 2nd ed. New York: Wiley,1996.
[3] KANELLOS F D, TSEKOURAS G J, PROUSALIDIS J. Onboard DC grid employing smart grid technology: challenges, state of the art and future prospects [J]. IET Electrical Systems in Transportation, 2015, 5(1): 1-11.
[4] ZAHEDI B, NORUM L E. Efficiency analysis of shipboard dc power systems [C]//39th Annual Conference of the IEEE Industrial Electronics Society. Vienna, Austria: IEEE, 2013: 689-694.
[5] PEDERSEN T A, PEDERSEN E. Bond graph modelling of marine power systems [J]. Mathematical and Computer Modelling of Dynamical Systems, 2012, 18(2): 153-173.
[6] 张淑兴. 应急柴油发电机组仿真研究 [D]. 大连:大连理工大学, 2009:14-16.
[7] 施亿生, 谢绍惠. 船舶电站 [M]. 北京:国防工业出版社, 1981:20-30.
[8] ZAHEDI B, NORUM L E. Modeling and simulation of all-electric ships with low-voltage DC hybrid power systems [J]. IEEE Transactions on Power Electronics, 2013, 28(10): 4525-4537.
[9] IZADI-ZAMANABADI R, BLANKE M. A ship propulsion system as a benchmark for fault-tolerant control [J]. Control Engineering Practice, 1999, 7(2): 227-239.
[10] 黄曼磊, 唐嘉亨,郭镇明. 柴油机调速系统的数学模型 [J]. 哈尔滨工程大学学报, 1997, 18(6): 20-25.
[11] Energy Development and Power Generating Committee of the Power Engineering Society. IEEE Recommended practice for excitation system models for power system stability studies:IEEE Std 421.5-1992 [S].New York, NY:IEEE, 1992.
[12] 邵伟, 徐政. 励磁系统参数整定研究 [J]. 中国电机工程学报, 2002, 22(10): 12-17.
[13] 谢镐立. 电压型逆变器三相桥式整流环节滤波参数电感量和电容量的选择 [J]. 电气传动, 1982(1):42-46.
Modeling and Simulation of Ship DC Power Supply
SUN Lei, XUE Shilong, ZHANG Yaming, CHEN Wenxiu
(School of Logistics Engineering, Shanghai Maritime University, Shanghai 201306, China)
According to the composition of DC power supply system in a ship, a diesel generator (original motive) speed regulating system, a synchronous generator excitation system and a three-phase rectifier module are analyzed and modeled. Using Matlab/Simulink, simulations of generators are carried out for the cases without load, with a stable load and with an abruptly changing load. The results show that the ship's DC power system is stable either when the load is increased or decreased.
ship DC power supply system; modeling; Matlab/Simulink; constant speed diesel generator
2017 -02 -06
国家自然科学基金面上项目资助(61673260)
孙 磊(1993-),男,硕士生,主要研究方向为船舶电力推进,E-mail:sunleislchn@sina.com
2095 - 0020(2017)03 -0132 - 07
U 665.12;TM 74
A
