基于CAN总线的光纤陀螺自动测试系统
2017-08-08王庆涛
李 彦, 王庆涛
(北京航空航天大学 仪器科学与光电工程系,北京 100191)
基于CAN总线的光纤陀螺自动测试系统
李 彦, 王庆涛
(北京航空航天大学 仪器科学与光电工程系,北京 100191)
星载光纤陀螺的测试项目多,耗时长,同时需要实时监控陀螺状态。针对上述问题,提出了一种采用控制器局域网(CAN)总线与现场可编程门阵列(FPGA)相结合的方案。基于Verilog语言设计下位机采集程序,VC6.0的微软基础类(MFC)框架编写上位机采集程序,设计自动测试系统实现自动测试功能,可以实时采集并自动存储陀螺的输出数据,同时实时监控光纤陀螺的工作电压、电流和环境温度,在出现过压、欠压、过流和温度异常情况下开启故障保护功能并报警,达到了预期的技术指标,可靠地保障光纤陀螺测试的顺利进行。
光纤陀螺; 控制器局域网总线; 自动测试
0 引 言
光纤陀螺从研制到生产需要经过大量的性能测试,测试项目多、测试时间长、工作量大一直是测试人员面临的主要问题,并且在单调、冗长的测试过程中,很可能会由于疏忽和经验缺乏对测试结果产生不良影响[1]。现阶段陀螺测试系统功能比较单一,仅仅能够实现单一产品数据的采集,并且需要工作人员实时监控测试过程中出现的故障,耗费大量的人力。如果不能及时发现供电电源故障,可能损坏光纤陀螺。因此,对光纤陀螺供电电源进行监控,可以实时记录电源的输出电压、电流,有利于分析陀螺的工作状态[2]。具备较少人工干预、自动化数据处理、自主故障诊断等特点的自动测试系统对光纤陀螺的研制和生产是十分必要的。
首先对自动测试系统功能进行分析,设计了一种基于控制器局域网(controller area network,CAN)总线的自动测试技术,实时监控电压、电流和环境温度,从硬件和软件两方面保护光纤陀螺,并对光纤陀螺数据自动采集、计算、显示和存储,定时开关电源,从而简化光纤陀螺测试环节,实现自动化测试。最后,通过实验检验自动测试系统功能。
1 光纤陀螺自动测试系统设计
1.1 系统功能
设计的光纤陀螺自动测试系统应具备以下功能:1)能有效地解决供电电源可能产生的故障,保护光纤陀螺安全测试;2)可以同时测试多个陀螺,也可以在测试中添加其他的陀螺或者设备节点,互不影响;3)通过CAN总线采集光纤陀螺数据,对数据进行处理,计算出陀螺方差、零漂和零偏等参数,并实时显示在计算机界面中;4)测试完成后,自动保存陀螺数据并关闭电源,实现自动化测试。
1.2 系统设计
设计的光纤陀螺自动测试系统如图1所示。

图1 光纤陀螺自动测试系统框图
针对+28 V供电的星载光纤陀螺,相应地,自动测试系统的输入设定为+28 V,以避免额外的电源供电。自动测试系统主要由固态继电器及其控制电路、过载保护电路、电流电压温度采集电路、AD采样电路、FPGA芯片、CAN总线电路构成。
1.2.1 过载保护原理
电源的电压在18~32 V,电流在0~1 A波动时,不会对光纤陀螺造成损伤。因此,过载保护芯片选取MAXIM公司的MAX14572,高精度可调节过载电压和过载电流的集成芯片(IC)[3],可承受高达±40 V的输入电压,内置开关FETs导通时电阻RON低于100 mΩ。MAX14572引脚UVLO,OVLO,SET1分别设置欠压、过压和限流值。当UVLO和OVLO引脚接地时,MAX14572将采用默认的VUVLO欠压值19.2 V,VOVLO过压值32 V。限流公式
R=11 500/ILIM
(1)
式中ILIM(mA)限流值为1 A,即R值选取11.5 kΩ。
1.2.2 检测电路原理
电流和电压采集的精度为0.01,环境温度采集的精度为0.1 ℃。电流检测采用Maxim公司生产的双向、精密电流传感放大器MAX471实现,内置35 mΩ精密传感电阻器,可测量电流的上下限为±3 A,通过外接2 kΩ电阻器将被测电流按1∶1转换为对地的电压[4],即输出为0~1 V,再经过放大器放大2倍。最终输入到AD的电压为0~2 V。A/D转换器分辨率:2N-1=AF/AMIN=(2-0)/0.01,N≈8。电压检测电路采用高精度、低温漂1 MΩ电阻器和56 kΩ电阻器串联分压。分压后输入给AD的电压为0~1.69 V,A/D转换器的分辨率:2N-1=AF/AMIN=(1.69-0)/(0.01),N≈8。A/D转换器要在8位以上,考虑到存在量化误差,以及噪声、温漂等其他误差。因此,电压和电流采样中的A/D转换器采用转换速率达65 MSPS的12位模/数转换器AD9235。AD9235为差分传输,可以抵消干扰,提高电路整体性能。由FPGA提供外部输入时钟。
DS18B20数字温度实时检测模块[5],为测量范围-45~+125 ℃的12位数字温度传感器,温度值计算公式
T=(-1)n11(26n10+25n9+24n8+23n7+22n6+21n5+ 20n4+2-1n3+2-2n2+2-3n1+2-4n0)
(2)
从上式计算其精度为0.062 5 ℃。信息经过单线接口送入DS18B20或从DS18B20送出,因此,从FPGA到DS18B20仅需要连接一条信号线。
1.2.3 CAN总线电路
CAN是一种具有高可靠性,有效支持分布式控制和实时控制系统[6~8]。选取FPGA作为CAN模块控制器,CAN控制器SJA1000[9],CAN收发器PCA82C250。PCA82C250是CAN控制器与物理总线之间的接口,对物理总线提供差动发送能力[10]。设计中有两点需要特别注意:1)FPGA并没有与SJA1000直接相连。这是因为对于设计选取的FPGA-Spartan6,其接口电平不支持5 V TTL的I/O标准,如果与5V I/O标准的SJA1000直接相连,可能导致FPGA管脚电流过大,造成器件锁死或者烧毁[11]。为此采用双向电平转换芯片74LVX3245,将SJA1000的5 V TTL电平信号转换成3.3 V I/O标准信号,连接到FPGA的引脚上。2)在CAN控制器与收发器之间不采用光电隔离。光电隔离虽然能增强系统的抗干扰能力,但会增加CAN总线有效回路信号的传输延迟,导致通信速率或距离减少。
CAN总线采用两路CAN_A和CAN_B备份形式,分别接到计算机上。计算机保证其中一路处于工作状态,实现与控制计算机通信。
1.2.4 FPGA控制电路
系统中除了应用过载保护芯片MAX14572硬件上保护光纤陀螺,FPGA编程控制固态继电器,从软件上保障光纤陀螺更可靠的运行[12]。固态继电器对比电磁继电器而言,没有机械零部件,固态器件完成触点功能,寿命长、可靠性高,没有输入线圈,没有触点燃弧和回跳,减少了电磁干扰和开关瞬态效应。控制电压大于3 V,输入电流大于5 mA时,固态继电器处于导通状态。实验测得固态继电器导通时会产生0.6 V的压降。
当供电电源出现过压、欠压或过流等故障时,电压、电流采样电路将数据输入FPGA,通过CAN总线发送到计算机,经过计算机分析采集到的数据,通过FPGA控制固态继电器切断电源,过程中会产生微小的延时。所以,过载保护芯片会首先切断光纤陀螺的电源,软件切断固态继电器作为后续保障。在故障排除后,计算机发送指令控制继电器导通,同时复位过载保护芯片,光纤陀螺再次工作。
1.3 CAN总线即插即用协议设计
在CAN总线中,计算机为整个系统中的主节点,自动测试系统设备和光纤陀螺设为从节点。为区分不同的CAN从节点设备,在每一个CAN从节点设备定义一个唯一的MAC地址,地址长度为4个字节。
节点正常上电后,处于未配置状态,主节点无法与从节点进行通信,需要进行即插即用配置。配置过程如下:
1)节点自举 :从节点发送自举帧,首先通过CAN_A通道发送自举帧,如果3 s后从节点仍未识别,则通过CAN_A通道再次发送自举帧,通过CAN_A通道最多允许发送5次自举帧,如果仍未识别,则采用CAN_B通道发送自举帧;同样,通过CAN_B通道最多允许发送5次自举帧。如果通过CAN_A和CAN_B通道均成功识别,则一直等待计算机发送探测帧,或重新上电。
2)节点自主发现:从节点如果收到主节点发送的探测帧,则检查自身MAC地址片是否与约束地址一致:如果匹配,则发送探测应答帧;不匹配,则不需要应答,主节点识别一个节点共需要发送8次探测帧[13]。
3)节点配置:从节点如果收到主节点发送的配置帧,则检查自身MAC地址是否与配置帧中的MAC地址匹配,如果匹配,则从该帧中获取主节点为其分配的8位节点地址nID,并发送配置应答帧,节点状态置为已识别。
从节点即插即用处理流如图2所示。

图2 从节点即插即用处理流程
新增节点添加到CAN总线网络后,计算机自动为其分配节点地址,实现与计算机通信。由于添加了CAN总线即插即用协议,能实现多个陀螺同时测试,也可以在陀螺测试中添加其他的陀螺或者设备节点。
1.4 计算机采集软件设计
微软基础类(Microsoft foundation classes,MFC)操作系统界面简洁,占用资源少,操作方便,因此,采用MFC设计采集软件、CAN通信的程序[14,15]。采集软件处理流程如图3所示。
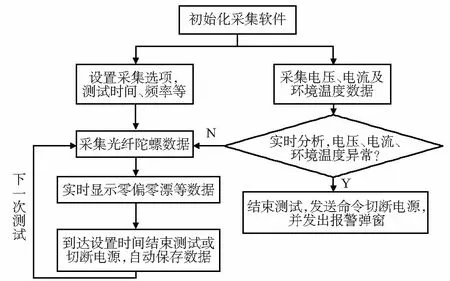
图3 采集软件处理流程
测试开始打开软件后,陀螺数据需要在陀螺接收到相应计算机指令才会被发送,而电压、电流及环境温度数据以2 Hz频率自主发送。当出现异常时,计算机通过CAN总线自动发送ShutDown命令给FPGA,切断电源。若没有出现异常,达到设置测试时间,计算机发送TestEnd指令,结束测试,自动保存数据。根据初始设置自动断电或进行下一次循环测试,实现自动化测试。
2 实 验
在光纤陀螺正常工作时开启采集程序,自动测试系统实时地测出陀螺数据、电压、电流和温度并显示在程序中。CAN 总线解决总线竞争的仲裁方案与以太网所采用的CSMA/CD 仲裁机制十分相似,即对报文的标识符按位进行逐位仲裁。将光纤陀螺报文设置为高优先级,保证陀螺数据优先传输。
在电路实际测试中,过载保护芯片MAX14572的欠压值为19.02 V,过压值为31.79 V,限流值为0.97 A,基本满足陀螺的供电要求。根据实验测试的结果与实际值相比较,可以看出精度达到了预期要求,如表1所示。

表1 实验测试结果
当出现异常情况时,自动测试系统控制系统关闭电源,可靠地保护光纤陀螺。与其他光纤陀螺测试系统相比,系统具有以下特点:1)实时监控陀螺供电电源输出的电压、电流和环境温度。一旦出现过压、欠压或者过流等故障,立即自动切断供电电源,并向测试人员发出报警,自动测试系统从硬件和软件两方面保护光纤陀螺;2)使用FPGA设计CAN总线和即插即用上层协议,不需要人为配置节点地址,可同时测试多个陀螺;3)使用VC6.0开发上位机用户界面,可实现光纤陀螺数据自动采集、计算、显示和存储,定时自动开关电源,并可对采集数据进行分析,保证光纤陀螺安全工作。
3 结 论
设计了基于FPGA和CAN总线的光纤陀螺自动测试系统,经过验证:系统可靠地保障了光纤陀螺电源自动供给和陀螺数据自动采集,满足了光纤陀螺自动测试的需求。
[1] 赵亚飞,宋凝芳,杜士森,等.基于Visual C++的惯性导航数据采集系统[J].压电与声光,2012,34(1):46-50.
[2] 党永刚,张 伟.光纤陀螺供电电源监控系统设计[J].现代电子技术,2015,38(14):152-155.
[3] 江 浩.MAX在矿用本质安全电源中的应用[J].煤炭技术,2015,34(1):282-284.
[4] 王耀辉,杨小军.光纤陀螺监测系统设计[J].电子应用技术,2010,36(10):117-123.
[5] 杜华程,许同乐,黄湘俊,等.基于CAN总线的只能传感器节点设计与应用[J].传感器与微系统,2015,34(2):82-84.
[6] Philips Semiconductors.CAN Specification 2.0 Part A[Z].1991.9.
[7] Ziermann T,Teich J,Salcic Z.DynOA A-dynamic offset adaptation algorithm for improving response times of CAN systems[C]∥Design,Automation & Test in Europe Conference & Exhibition(DATE),2011,IEEE,2011:1-4.
[8] 高 阳,李永红,岳凤英,等.基于DSP和FPGA的CAN总线监视系统设计[J].电子器件,2016,39(1):164-167.
[9] Application note of SJA1000.Philips Semiconductors[Z].1997.
[10] 童 亮.基于CAN总线的车用只能传感器系统设计[J].传感器与微系统,2008,27(1):90-92.
[11] 张培坤,高 伟,宋宗喜,等.基于FPGA的CAN总线通信节点设计[J].仪器技术与传感器,2010,12:67-70.
[12] 叶 东,周志炜,张 飚,等.基于FPGA的多路光电编码数据采集系统[J].传感器与微系统,2006,25(5):45-47.
[13] 周 冲.支持即插即用的CAN总线分布式测控网络的研究[D].长沙:华中科技大学,2008:23-24.
[14] 邹 坤,石云波,焦佳伟,等.基于以太网的加速度传感器数据采集传输系统设计[J].传感器与微系统,2015,4(12):66-68.
[15] Liu Yang,Liu Yabin,Chen Kunzhong,Design and Application of Automatic Test System Software Framework[J].Computer Measurement & Control,2007,15(11):1-2.
FOG automatic test system based on CAN-bus
LI Yan, WANG Qing-tao
(School of Instrument Science and Opto-electronics Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Lots of test projects of consume a large amount of time and need real-time monitoring.Aiming at the above problems,the spaceborne FOG automatic test system adopts program of controller area network(CAN)and FPGA is proposed,which bases on Verilog designing collecting lower computer(PC) program and based on Microsoft foundation classes(MFC)of VC6.0 designing upper PC program.The system can real-time acquire and automaticly store FOG data.Meanwhile,monitor working voltage,current and environmental temperature of FOG.In case of overvoltage,undervoltage,over current and abnormal temperature,the system opens fault protection function and alarm.The system achieves expected technical index,and successfully guarantees the test go well.
spaceborne fiber-optic gyroscopes; controller area network(CAN); automatic test system
10.13873/J.1000—9787(2017)08—0082—03
2016—08—31
TP 273.5
A
1000—9787(2017)08—0082—03
李 彦(1975-),女,博士,讲师,主要从事光纤传感研究工作。
王庆涛(1991-),男,通讯作者,硕士研究生,主要研究方向为光纤陀螺自动测试技术,E—mail:w_qingtao@buaa.edu.cn。