智能车跟随系统开发*
2017-08-08卫玉梁靳伍银
卫玉梁, 靳伍银
(兰州理工大学 机电工程学院,甘肃 兰州 730050)
智能车跟随系统开发*
卫玉梁, 靳伍银
(兰州理工大学 机电工程学院,甘肃 兰州 730050)
开发了一种基于STM32视觉导航的目标跟随小车智能控制系统,实现了对特定目标物体的快速识别与实时准确跟随。使用OV7670图像传感器采集目标物图像信息,对图像进行灰度化、降噪、取反等处理后,通过亚像元定位技术的质心法获取目标物坐标位置,为智能车提供方向导航,跟随过程中的画面实时发送至上位机。结果表明:小车在直行和转向跟踪实验中表现良好,跟随系统具有良好的跟踪效果,可实现对目标物的实时准确跟随。
STM32; 质心法; 目标识别与跟踪; 智能车
0 引 言
随着汽车产业的快速发展,智能车的相关技术不断创新,其中包括目标跟踪等技术[1]。同时,自动跟踪车辆也正逐步应用于货物运取、辅助驾驶等领域[2]。而高效快速的跟踪方案通常存在体积大、价格昂贵、功耗高等不足[3]。针对上述情况,本文设计开发了一种成本低、功耗小、性能稳定的智能小车跟随控制系统,以TM32F103ZET6微控制器为主控单元、直流电机作为动力驱动单元、CMOS图像传感器OV7670为图像采集单元。采用数字图像处理技术对图像进行处理,确定目标位置,为小车提供方位导航,实现对目标物的智能准确跟随。
1 系统总体设计
智能车的目标跟随系统结构如图1所示,以Arduino遥控车携带目标物作为被跟踪对象,跟踪车辆以STM32处理器为核心,连接摄像头及超声波传感器进行信息采集作为系统输入,驱动并控制电机运作作为系统输出。车体自身安装显示屏用以显示拍摄处理后的目标图像、两车距离及输出占空比等其他外设信息,配置无线模块与上位机通信,实现跟踪过程中图像画面的实时传输,达到监测跟踪效果的目的。图2为系统的主要硬件实物照片。
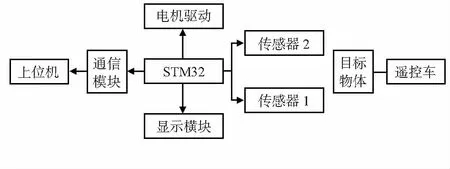
图1 系统结构
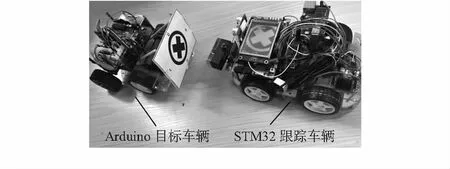
图2 系统硬件实物照片
2 硬件设计
2.1 单片机控制模块
单片机选用STM32F103ZET6,工作电压范围为2.0~3.6 V,CPU工作频率最高可达72 MHz,具有速度快、成本低、性价比高、运算处理能力强等优点。同时拥有大量的外设I/O接口,可连接和驱动所需的各类传感器与外部设备[4],以实现指定功能。
2.2 图像传感器模块
OV7670为1/6in(1in=2.54 cm)CMOS VGA图像传感器,工作电压2.5~3.0 V,感光阵列为640×480,提供VGA摄像头和影像处理器的所有功能。通过SCCB总线控制同时兼容I2C接口,可以输入整帧、子采样、取窗口等方式的各种分辨率8位影像数据[5]。VGA图像最高达到30帧/s,其像素时钟(PLCK)最高可达24 MHz。
使用STM32驱动摄像头进行数据读取时, 直接通过I/O抓取每帧的数据十分占用CPU,因此,设计通过模块自带FIFO芯片缓存1~2帧图像,单片机再直接从中读取并处理,减少CPU的占用量,提高了系统运行速度。
2.3 显示模块
为了更加直观地观察小车跟踪状况,在车身安装4.3 in TFT液晶显示屏,像素为320×240,实时显示跟随过程中OV7670摄像头捕捉并处理的二值图像。
2.4 无线通信模块设计
无线模块以AR9331为核心搭建的WiFi模块实现。模块预置QpenWrt(Linux)系统,符合国际标准的802.11 b/g/n协议,采用DSSS,OFDM,BPSK,QPSK,CCK和QAM基带调制技术,能适应路由器等设备的无线热点,最大连接速率可达150 Mbps[6]。上位机与模块完成数据通信连接后,使用C#编写的上位机软件读取和显示摄像头采集的实时图像信息。摄像头一侧配置有照明功能,确保在昏暗环境下对目标的准确识别与跟踪。
2.5 电机驱动电路模块
采用2个L298N驱动4路直流电机,内含2个H桥的高电压大电流全桥式驱动器,可以用来驱动电动机和步进电动机等感性负载[7]。其最高工作电压可达46 V,瞬间峰值电流可达3 A,持续工作电流为2 A,额定功率25 W。采用标准逻辑电平信号控制,具有2个使能控制端。
2.6 电源电路模块
采用12 V锂电池直接为电机驱动模块L298N供电,同时通过SD6A1—5降压后滤波,再由LM117稳压降至3.3 V,实现为主控制器供电。
2.7 超声波测距模块
采用HC—SR04超声波测距传感器辅助导航,保持目标车辆与跟踪车辆在可跟踪识别的距离范围内,同时可根据车距调节自身电机的输出占空比。其测量范围为2~400 cm,测量精度达3 mm,工作电压为5 V。
3 软件设计
3.1 质心法目标识别原理
质心法指图像的能量密度函数一阶空间矩和零阶空间矩的比值[8]。当小车捕捉到目标的图像信息后,经过相应的灰度化处理,忽略图像中其他的微小光斑,即通过滤波以及设置相应阈值取反,将图像中的杂散光点等干扰因素融入到背景中之后,可假设图像内单个目标物的质心位置为(XC,YC),该位置可由图像灰度值重心计算式(1)得到,即
(1)
式中 XC,YC为计算所得质心坐标;x,y分别为图像平面的横纵坐标;D为限定的积分区域为已知量,即为图像尺寸大小,由OV7670摄像头视场以及液晶显示屏像素值确定;G(x,y)为每个像素点的灰度值,也称为图像灰度函数。
上述积分为连续积分,但由摄像头得到的实际图像是离散的,只能得到G(x,y)在像素点位置的采样值,所以,采用质心法时,将式(1)做近似推导得式(2),将连续积分变为累加和的形式,图像由n个像素组成
(2)
(3)
3.2 目标设计及其识别流程
由上文可知,求取目标点位置坐标需要对图像全局做灰度值累加。因此,目标背景对于识别与跟踪的准确性有很大影响,可通过以下方法减少目标背景不统一所产生的误差:1)设计背景统一且对称的目标物。2)在将图像转换为二值图像时,设置适当阈值将微小光斑等干扰点融入背景中。3)通过超声波测距传感器修正与目标物距离,使目标物占据所采集图像的大部分像素。
系统启动后,OV7670开始采集视频图像,并缓存到FIFO芯片,当系统判断每帧图像完整采集后,进入目标识别子程序,对图像进行相应的处理从而识别图像中目标位置,流程如图3(a)所示。

图3 目标识别流程
如图3(b)所示,进入目标识别子程序,图像传感器采集图像后进行灰度化,为保证系统跟踪时图片的连续性,同时提高系统跟踪的实时性并最大限度地去除背景噪声,将前一帧像素平均值加上2倍均方差作为当前帧的背景值。当前帧各个像素值去除背景后,设置自适应阈值将图像二值化并取反,再利用式(3)计算质心位置,得到目标坐标,为小车提供方位导航。
3.3 目标识别算法仿真
在Matlab中对目标识别算法进行仿真,如图4所示,目标处于较为统一背景环境中,算法将一些干扰因素二值化后融入到背景中,具有很高的识别效率,可以精确定位到目标中心位置。
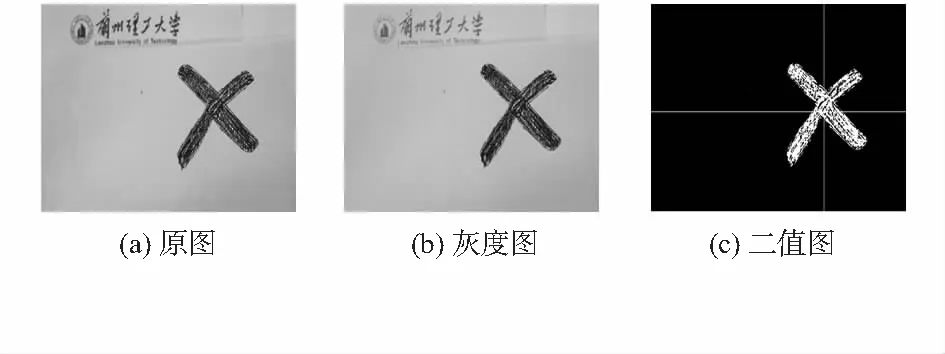
图4 目标识别算法仿真
4 实验结果
实验时通过无线视频模块将跟踪的实时画面传输至上位机。在直行跟踪过程中,调节遥控小车脉冲宽度调制(PWM)值0~225输出控制前车车速,分别对目标小车在匀速直行、变速直行情况下进行多次测量实验,同时也对转向跟踪进行反复的实验测试。在目标车辆变速直行过程中以及向左0°~90°匀速转向的跟踪过程中,从上位机视频窗口随机截取数帧实时画面,如图5所示。实验数据采样值见表1。

图5 直行与转向跟踪过程

相机视场匀速直行质心位置像素匀速直行车距/cm转向质心位置/像素实际偏转角/(°)跟踪偏转角/(°)变速前车PWM值变速直行质心位置变速直行车距/cm(320×240)(162,120)10(85,118)2423120(161,120)10(320×240)(159,121)11(157,120)4549140(162,125)19(320×240)(166,123)12(210,117)6066160(160,135)32(320×240)(161,120)10(240,115)7072130(163,128)21(320×240)(162,121)11(312,114)8588110(159,119)9
实验结果表明:当目标车辆匀速直行时,跟踪小车所测得目标质心点纵坐标与两车车距基本稳定,在恒定值上下小幅波动;当目标车辆变速直行时,质心点纵坐标随着两车距离加大而增高,从而提高输出占空比对前车加速追赶,两者具有很好的线性关系,同时两车在转向时的偏转角度也大致重合,表明,跟踪小车总体上具有良好的跟踪效果。
5 结束语
给出了智能车目标跟踪控制系统实现的基本原理和系统硬件设计、软件开发的流程,并进行了相应的算法仿真以及实物实验。实验结果表明:系统整体运行稳定,达到了预期的效果。虽然在对跟踪目标丢失再寻找等方面存在一定不足,但系统具有较好的再开发性,对于智能车辆的目标跟踪研究具有一定的参考意义。
[1] 杨 欢,熊 剑,郭 杭,等.基于CORTEX—M4的多传感器组合导航系统设计[J].传感器与微系统,2017,36(2):88-90.
[2] 李 婕.基于STM32的无线视频监控智能小车设计[D].兰州:兰州理工大学,2014.
[3] 邹 斌,庄雷雨,李超群,等.机器视觉智能车虚拟环境的搭建[J].自动化与仪表,2016,31(9):22-26.
[4] 刘太钢,刘响响,周克良,等.基于STM32智能家用车库控制系统设计[J].传感器与微系统,2016,35(8):98-100.
[5] 李慧敏,樊记明,杨 笑.基于STM32和OV7670的图像采集与显示系统设计[J].传感器与微系统,2016,35(9):114-117.
[6] 贾玉雷,靳伍银,李鹏勃,等.基于ZIG BEE技术的智能车无线控制系统开发[J].传感器与微系统,2013,32(5):135-137.
[7] 刘 磊,孙晓菲,张 煜.基于STM32的可遥控智能跟随小车设计[J].电子测量技术,2015(6):31-33.
[8] 曹宗伟,李星全,刘 伟,等.数字相机校准中光斑中心的亚像素定位[J].测绘技术装备,2016,18(1):93-95.
Development of intelligent vehicle following system*
WEI Yu-liang, JIN Wu-yin
(School of Electromechanical Engineering,Lanzhou University of Technology,Lanzhou 730050,China)
An intelligent tracking-vehicle control system based on STM32 is developed to achieve quick identification and accurate tracking of specific target in real-time.Acquire image information of target using OV7670 after graying,de-noising and reverse processing the image,obtain target coordinates by the centroid sub-pixel positioning technology to provide direction navigation for intelligent vehicle,and picture of target can be sent to host computer during tracking process.The experimental result shows that the system has a good tracking effect and can achieve real-time accurate and tracking of target.
STM32; centroid; target recognition and tracking;intelligent vehicle
10.13873/J.1000—9787(2017)08—0075—03
2017—06—12
国家自然科学基金资助项目(11372122)
TP 249
A
1000—9787(2017)08—0075—03
卫玉梁(1994-),男,硕士研究生,主要研究方向为人工智能与机器人等。
靳伍银(1969-),男,通讯作者,研究员,博士研究生导师,E—mail:wuyinjin@hotmail.com。