全自动汽车离合器盖总成综合性能检测试验台数据融合方法
2017-08-07郜思洋张邦成王占礼
郜思洋,张邦成,王占礼,刘 亮
(长春工业大学 机电工程学院,吉林 长春 130012)
全自动汽车离合器盖总成综合性能检测试验台数据融合方法
郜思洋,张邦成,王占礼,刘 亮
(长春工业大学 机电工程学院,吉林 长春 130012)
全自动汽车离合器盖总成综合性能检测试验台是检测汽车离合器盖总成性能的重要设备,其检测精度的高低是决定离合器盖总成产品质量的重要因素。为了提高全自动汽车离合器盖总成检测试验台的检测精度,降低误检率,利用贝叶斯估计算法对测量数据进行数据融合。实例分析表明,基于贝叶斯估计算法的全自动汽车离合器盖总成综合性能检测试验台数据融合保证了汽车离合器盖总成的检测精度及可靠性,提高了汽车离合器盖总成的合格率。
离合器盖总成;数据融合;贝叶斯估计算法
离合器是汽车结构中的重要组成部分,其主要功能是防止传动系过载,提高汽车起步平稳性[1]。全自动汽车离合器盖总成综合性能检测试验台是检测汽车离合器盖总成性能的重要设备,利用检测试验台可以精确检测离合器盖总成的位移。传统的检测方式多采用单一传感器进行数据采集,实践证明:与单传感器相比,多传感器信息融合技术在检测、跟踪和目标识别等方面,能够增强数据可靠度,提高数据精度[2]。
数据融合是综合处理多源信息的有效手段[3]。近年来,国内外学者对数据融合方法进行了大量研究,主要方法有加权平均法、贝叶斯估计、神经网络、卡尔曼滤波、模糊集理论、统计决策理论、聚类分析等[4-5]。其中文献[6]将神经网络数据融合的方法应用在固体火箭发动机试验上,验证了神经网络数据融合方法的可行性。文献[7]将卡尔曼滤波与其他聚类方法结合,引入汽包水位多传感器数据融合控制系统,系统能够快速融合传感器信号,并及时进行控制。文献[8]针对路灯电缆工作状态提出多传感器模糊数据融合技术的故障诊断方法,通过融合运算方式,对电缆的工作状态进行准确估计并分析决策,提高了故障诊断的准确性。文献[9]提出了卡尔曼滤波与神经网络相结合的数据融合方法,提高了检测精度。文献[10]利用神经网络与遗传算法相结合的方法,对多传感器成像数据进行数据融合,提高了成像清晰度。文献[11]通过多谱传感器对不同时段的输出数据进行分析,基于贝叶斯估计对输出数据进行数据融合,提高了检测数据的准确性。文献[12]将卡尔曼滤波应用于多传感器数据融合中,提高了CT扫描图像的清晰度。

1—盖总成水平移动机构;2—抓取机构;3—支架;4—盖总成检测试验台主机

1—压盘加载装置小带轮;2—压盘加载装置大带轮;3—活动板;4—力传感器;5—传感器连接柱;6—压盘推板;7—压盘推柱;8—离合器盖总成
为了提高全自动汽车离合器盖总成检测试验台检测的准确性和精度,本文基于贝叶斯估计算法的多传感器数据融合方法对盖总成位移数据进行数据融合,有效解决了单一传感器检测精度差的问题。
1 全自动汽车离合器盖总成综合性能检测试验台工作机理
全自动汽车离合器盖总成综合性能检测试验台主要由盖总成水平移动机构、抓取机构、支架以及盖总成检测设备主机组成,检测试验台能够模拟离合器盖总成工作的全过程。具体结构如图1所示。
检测试验台主机是检测系统的核心部分,其作用是实现对离合器盖总成的精度检测,它主要由压盘加载装置小带轮、压盘加载装置大带轮、活动板、力传感器、传感器连接柱、压盘推板、压盘推柱支架组成,结构如图2所示。其工作原理为伺服电机旋转将运动传递到压盘加载装置小带轮,通过同步带将动力传递到压盘加载装置大带轮,大带轮将动力传到活动板,经由力传感器、传感器连接柱、压盘推板、压盘推柱一系列传递后,最终将力传递到盖总成压盘,实现了对压盘的加载。
在离合器盖总成检测过程中,试验台通过检测离合器盖总成位移和载荷来判断离合器盖总成是否合格,在载荷满足合格指标的情况下,为了能够更加准确地采集到离合器盖总成的位移,本文采用位移传感器均匀分布的布置方式检测盖总成位移,传感器布置如图3所示。
2 基于贝叶斯的全自动汽车离合器多传感器数据融合方法
在全自动汽车离合器盖总成综合性能检测试验台检测过程中,位移传感器采集的数据存在差异,为了得出最接近真值的位移数据,对传感器信号进行数据融合,得到最接近真实值的检测结果。

图3 测量压盘位移传感器布置图
采用贝叶斯估计算法对多传感器数据进行数据融合。基于贝叶斯估计算法的数据融合分为3个步骤,分别为建立置信距离矩阵、融合数据选择方法和贝叶斯估计融合计算[13-15]。
2.1 建立置信距离矩阵
由于每个传感器输出数据的有效性不能确定,在融合计算之前必须对输出的位移数据进行判断。依据每个传感器测量数据的关系,充分利用先验知识,判断测量数据的真实性。
采用N个位移传感器进行位移测量,x1,x2,…,xN分别表示N个位移传感器输出的位移值,p(x1),p(x2),…,p(xN)分别表示x1,x2,…,xN的概率密度函数。根据统计规律易知x1,x2,…,xN均服从正态分布。x1,x2,…,xn分别为x1,x2,…,xN的样本,σ为方差,则置信距离为:

(1)

(2)
式(1)表示xi对xj的置信距离,同理式(2)表示xi对xj的置信距离。其中

(3)

(4)

图4 隶属函数曲线
根据上式可知,dij反映了传感器i输出数据对传感器j输出数据的支持程度。同理,由此方法计算可得出置信距离矩阵为:

(5)
特殊情况下,当xi=xj时,dij=0;当xi≫xj或xi≪xj时,dij=dji=1.
2.2 数据融合选择方法
根据置信距离矩阵,建立关系矩阵,用以判断传感器输出数据的支持程度和有效。结合模糊数学中隶属度的概念,引入阈值δ1和δ2,建立隶属函数曲线,考虑处理器的计算速度和实时性要求,隶属函数曲线采用直线,如图4所示。
当置信距离dij<σ1时,λij=1,说明位移传感器i输出的数值支持位移传感器j输出的数值。当dij>σ2时,λij=0,说明位移传感器输出i数值不支持位移传感器j输出数值,如下式所示。

(6)
因为N个传感器测量的都是离合器压盘位移,理论值都是一样的,但是由于传感器精度和误差等原因,测得的数值有一定差异,获得支持程度较高的传感器数值与真实值更为接近。选择获得高支持程度的数值进行融合计算,进一步提高精确度。
经计算得到关系矩阵ψ。

(7)
引入另一个阈值θ,以得到有效的数值,只有传感器的测量数据>θ时,认为测量的数据是有效的,对这样得到m个有效数据进行数据融合。
2.3 基于贝叶斯估计融合计算
贝叶斯估计理论相对于其他估计方法的最大优点是对先验知识进行充分利用。如在测量压盘位移时,由于运行状况的不断变化和传感器内部各个参数的变化,使得测得的位移值不确定性随时间不断增大,所以贝叶斯估计融合必须描述不确定动态的变化。将由关系矩阵选择得到的m个有效的数据表示为(x1,x2,x3,…,xm),其被测参数的条件概率密度函数可由下式得出:

(8)

(9)
其中

(10)
(11)

(12)
综合式(9)、(12)可得数据融合结果:

(13)
3 实例分析
全自动汽车离合器盖总成检测试验台应用3个位移传感器对压盘位移进行测量,为了使实验过程更接近真实值,同时考虑温度、湿度、震动对传感器的影响,在一天中的不同时间段进行实验测量。记录50次测量结果,如图5所示。
取第一组数据进行数据融合计算,对第一组三个传感器位移数据进行贝叶斯数据融合,首先计算置信距离矩阵:

(14)
得出置信距离矩阵后,确定参数δ1和δ2,根据位移测量精度要求,经过大量计算,结合本试验台自身情况及经验得出:δ1=0.30,δ2=0.80,将置信距离矩阵代入式(6)中得到关系矩阵:

(15)
由关系矩阵可以看出,传感器1数据获得的支持度较低,因此需要淘汰传感器1测得的数据。选用其他两个传感器进行融合,代入式(13)中,得出融合结果:
u1=5.161。
(16)
同理对测量的其他组数据进行融合计算,结果如图6表示。

图5 测量值分布图
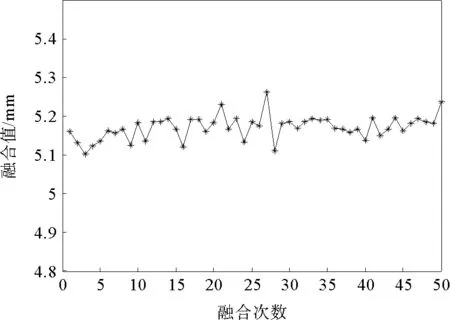
图6 数据融合结果
由融合结果可知,测距误差均在±1 mm内。仿真结果表明,采用贝叶斯多传感器数据融合方法有效提高了全自动汽车离合器盖总成检测试验台的检测精度。
4 结论
在分析全自动汽车离合器盖总成性能检测试验台工作机理的基础上,基于贝叶斯估计算法对试验台传感器测量数据进行了数据融合,提高了设备的检测精度。仿真实验结果表明,采用数据融合的全自动汽车离合器盖总成综合性能试验台,使误差值均在±1 mm范围内,满足试验台的精度要求,验证了基于贝叶斯估计的数据融合方法的有效性。
[1]徐汉斌.汽车离合器综合性能检测机软件设计[J].机电工程技术,2007,36(3):22-23. XU Hanbin.Software design for the comprehensive performance test machine of automobile clutch[J].M & E Engineering Technology,2007,36(3):22-23.
[2]严怀成,黄心汉,王敏.多传感器数据融合技术及其应用[J].传感器与微系统,2005,24(10):1-4. YAN Huaicheng,HUANG Xinhan,WANG Min.Multi-sensor data fusion technique and its application[J].Transducer and Microsystem Technologies,2005,24(10):1-4.
[3]岳元龙,左信,罗雄麟.提高测量可靠性的多传感器数据融合有偏估计方法[J].Acta Automatica Sinica,2014,40(9):1843-1852. YUE Yuanlong,ZUO Xin,LUO Xionglin.Improving measurement reliability with biased estimation for multi-sensor data fusion[J].Acta Automatica Sinica,2014,40(9):1843-1852.
[4]周中良,于雷,敬军.基于模糊理论的多传感器数据融合系统[J].电光与控制,2007,14(2):23-25. ZHOU Zhongliang,YU Lei,JING Jun.A multi-sensor data fusion system based on fussy theory[J].Electronics Optics & Control,2007,14(2): 23-25.
[5]侯娟,费耀平,胡小霞,等.基于先验信息和谱分析的聚类融合算法[J].计算机应用研究,2010,27(6):2103-2105. HOU Juan,FEI Yaoping,HU Xiaoxia,et al.Clustering ensemble algorithm based on prior knowledge and spectral analysis[J].Application Research of Computers,2010,27(6):2103-2105.
[6]沈飞,郭军.基于BP神经网络的数据融合方法[J].自动化与仪器仪表,2005,121(5):63-65. SHEN Fei,GUO Jun.Data fusion method based on BP neural network[J].Automation and Instrumentation,2005,121(5): 63-65.
[7]刘经宇,方彦军.基于卡尔曼滤波的汽包水位多传感器信息融合方法研究[J].电力自动化设备,2008,28(4):28-31. LIU Jingyu,FANG Yanjun.Research on drum level multi-sensor data fusion based on Kalman filter[J].Electric Power Automation Equipment,2008,28(4):28-31.
[8]孙文义,马淑华,顾德英.模糊数据融合故障诊断在电缆监测中的应用[J].单片机与嵌入式系统应用,2010,10(2):18-19. SUN Wenyi,MA Shuhua,GU Deiying.Application of fuzzy data fusion diagnosis algorithm in cable monitoring[J].Microcontroller & Embedded Systems,2010,10(2):18-19.
[9]SAFARI S,SHABANI F,DAN S.Multirate multisensor data fusion for linear systems using Kalman filters and a neural network[J].Aerospace Science & Technology,2014,39(6):465-471.
[10]LI J,PENG Z.Multi-source image fusion algorithm based on cellular neural networks with genetic algorithm[J].Optik-International Journal for Light and Electron Optics,2015,126(24):5230-5236.
[11]张品,董为浩,高大冬.一种优化的贝叶斯估计多传感器数据融合方法[J].传感技术学报,2014,27(5):643-648. ZHANG Pin,DONG Weihao,GAO Dadong.An optimal method of data fusion for multi-sensor based on Bayesian estimation[J].Chinese Journal of Sensors and Actuators,2014,27(5):643-648.
[12]BHUVANESWAR I,ARUNA P,LOGANATHAN D.A new fusion model for classification of the lung diseases using genetic algorithm[J].Egyptian Informatics Journal,2014,15(2):69-77.
[13]WANG J H,LI D,CHEN D F.E Bayesian estimation and hierarchical Bayesian estimation of the system reliability parameter[J].Systems Engineering Procedia,2012(3):282-289.
[14]TONG Q L,ZHANG Q,MIN R,et al.Bayesian estimation in dynamic framed slotted ALOHA algorithm for RFID system[J].Computers & Mathematics with Applications,2012,64(5):1179-1186.
[15]刘荣玄,朱少平.正态模型刻度参数的经验贝叶斯估计的渐近性[J].统计与决策,2009(17):158-160. LIU Rongxuan,ZHU Shaoping.Asymptotic property of empirical Bayesian estimation of normal model scale parameter[J].Statistics & Decision,2009(17):158-160.
(责任编辑:高丽华)
Data Fusion Method of Comprehensive Performance Test Bench for Full Automatic Automobile Clutch Cover Assembly
GAO Siyang, ZHANG Bangcheng, WANG Zhanli, LIU Liang
(School of Mechatronic Engineering, Changchun University of Technology, Changchun, Jilin 130012, China)
The comprehensive performance test bench for full automatic automobile clutch cover assembly is the important equipment to detect the performance of automobile clutch cover assembly and the detection accuracy is an important factor to determine the quality of the clutch cover assembly product. In this paper, Bayesian estimation algorithm was applied to integrate the measurement data with the purpose of enhancing the detection accuracy and reducing the false detection rate of full automatic automobile clutch cover assembly. Example analyses show that the data fusion method of the comprehensive performance of test bench for full automatic automobile clutch cover assembly based on Bayesian estimation algorithm guarantees the detection accuracy and reliability of the automobile clutch cover assembly and thus improves the qualification rate of automobile clutch cover assembly.
clutch cover assembly; data fusion; Bayesian estimation algorithm
2017-01-12
吉林省发改委项目(2015Y063);吉林省科学技术厅项目(20150203017GX)
郜思洋(1988—),男,吉林长春人,博士研究生,主要从事动平衡检测技术方面的研究. E-mail:195654762@qq.com 张邦成(1972—),男,吉林长春人,教授,博士生导师,主要从事动平衡检测技术方面的研究工作,本文通信作者. E-mail:zhangbangcheng@ccut.edu.cn
U467.5
A
1672-3767(2017)05-0037-06
10.16452/j.cnki.sdkjzk.2017.05.006
