光电引导系统在舰载机着舰引导中的作用分析
2017-08-07李喜龙范海震史会丽
李喜龙范海震史会丽
(1.海军航空兵学院装备部葫芦岛125001)(2.中国电子科技集团公司第二十七研究所郑州450047)
光电引导系统在舰载机着舰引导中的作用分析
李喜龙1范海震2史会丽2
(1.海军航空兵学院装备部葫芦岛125001)(2.中国电子科技集团公司第二十七研究所郑州450047)
论文对航母载机着舰引导过程中配置的主要引导设备的作用进行了介绍,并通过建立引导系统的仿真模型,对着舰引导雷达和光电引导系统与飞控系统铰链的自动着舰控制进行了仿真,并根据仿真结果进行了光电引导系统在舰载机着舰引导中的作用的分析。
着舰引导;光电引导系统;光学助降系统;着舰引导雷达;电视监视系统;仿真
Class NumberTN967
1 引言
舰载机着舰引导是航母发展中的重要研究课题,20世纪80年代以后,随着技术的发展,以精确数据为引导信息的“精密进近着舰”引导成为舰载机着舰引导系统的发展趋势,光电着舰引导系统工作于光频,测量精度高、抗电子干扰能力强,具有高分辨率成像能力,而且适装性好,在着舰引导过程中引入光电引导系统,组成多种引导手段互相匹配,互补共存的新型着舰引导系统,已经成为一种发展趋势。
2 着舰引导系统的组成
自法国研制出“光电多传感器着舰引导系统—DALLAS”[1]并装备于“福熙”号航母和“戴高乐”号核动力航空母舰和美国海军实施“进近着舰成像系统—VISUAL”[1]并实现装备后,新型光电引导系统就表现出了旺盛的生命力,本文所讨论的着舰引导系统中,主要包含光学助降系统、着舰引导雷达、电视监视系统和光电引导系统,通过分析引导设备在舰载机着舰过程中各个阶段的作用,并通过仿真计算对着舰引导系统精度的影响,完成对光电引导系统在舰载机着舰引导系统的作用分析。在舰载机着舰引导过程中,上述引导设备的任务剖面图如图1所示。
2.1 光学助降系统
光学助降系统是利用叠接的多层可见光(包括激光)束为舰载机驾驶员提供可视的理想下滑道提示和着舰指令的进近着舰引导系统。该引导方式以舰载机驾驶员目视灯光颜色的不同(如“ICOLS”远程激光助降系统指示的下滑航路由红橙绿三色表示5条航路,其中,闪红光为不安全的低航路,稳定的红光为低航路,稳定的橙色光为正确的下滑航路,稳定的绿光为高航路,闪绿光为过高航路),判断并控制着舰飞机相对于理想下滑道的高低,根据中线跑道灯,来控制着舰飞机相对于理想下滑道的方位。
光学助降系统经过多年发展,包括常规菲涅尔透镜助降系统(FLOLS)、改进型菲涅尔透镜助降系统(IFLOLS)和激光灯阵助降系统。改进型菲涅尔透镜助降系统(IFLOLS)相比常规菲涅尔透镜助降系统(FLOLS),增加了菲涅尔透镜灯箱数量,以提高下滑道指示精度;激光灯阵助降系统则利用激光波束直观性和波束边沿清晰性的特点,指示距离更远。
光学助降系统在舰载机着舰引导任务剖面的作用范围约为距舰2海里的视距起点至着舰决断点的范围区域。
2.2 着舰引导雷达
着舰引导雷达用来测量着舰飞机相对于舰面的偏差数据,上述偏差数据发送到着舰引导系统,根据甲板运动、风向和风速等数据,生成着舰飞机的俯仰和侧滑控制指令,通过超高频(UHF)信道向飞机发送。美国自20世纪70年代开始,使用AN/ SPN-42、AN/SPN-46引导雷达进行自动着舰的试验。
着舰引导雷达一直是航母的重要进近着舰引导设备。其优点是作用距离远(可达数十公里),全天候能力强,可提供较高精度的距离、偏航角数据,为实现自动进近着舰提供了可能。
着舰引导雷达在舰载机着舰引导任务剖面的作用范围约为飞机进入下滑道入口前至舰艉切面的范围区域。
2.3 电视监视系统
电视监视系统在着舰引导系统中并不直接与着舰飞机进行数据铰链并完成引导功能,其基本功能是监视、记录飞机的起降过程,辅助起降指挥决策,保证起降安全,并为事故分析和飞行讲评提供依据。
在舰载机着舰过程中,电视监视系统安装在斜角甲板跑道中心线上的中线摄像机,可以直观观察到着舰舰载机进入理想下滑道直至着舰的全过程,通过结合舰上惯导系统给出的舰船纵横摇及升沉数据,利用十字线稳定算法,可以在中线摄像机图像上叠加表示理想下滑道的十字线,着舰指挥官(Landing Signal Officer,LSO)通过观察着舰飞机相对于十字线的位置情况来判断飞机对准理想下滑道的情况;同时还可以观察到飞机起落架和尾钩是否放下。由于着舰指挥官在舰载机着舰指挥过程中起到举足轻重的作用,电视监视系统也是着舰引导系统中一个重要的子系统。
电视监视系统在舰载机着舰引导任务剖面的作用范围约为飞机距舰约3海里至着舰的范围区域。
2.4 光电引导系统
光电引导系统使用高分辨率电视、红外热像仪和激光跟踪等复合手段,完成着舰飞机相对于舰面的偏差数据的测量。光电引导系统主要完成精密进近和着舰阶段的引导,同时兼顾飞机姿态和着舰操作状态的监视功能,是解决精密引导问题,从而保证舰载机安全着舰的重要手段。20世纪80年代后,法国和美国先后研制了光电引导系统并实现装备,并在此基础上开展了自动着舰引导的试验。
光电引导系统在舰载机着舰引导任务剖面的作用范围约为飞机进入下滑道至着舰的范围区域(可有效解决引导雷达近距离的盲区)。
3 引导系统仿真分析模型
着舰引导系统在舰载机着舰引导过程中的控制原理如图2所示。
在舰载机着舰过程中,舰船运动、引导系统控制率、飞行员、飞控系统都可以对着舰造成影响。
首先,电视监视系统在舰载机着舰过程中用来监视着舰飞机对准理想下滑道的情况,辅助着舰指挥官进行着舰决策,其引导功能实际是“飞机偏航监视”而非“航迹引导”,在此不做电视监视系统的引导精度仿真分析。
其次,光学助降系统为飞行员提供稳定的理想下滑道灯光指示,飞行员依据指示灯光信息操纵飞机完成进近及着舰控制,整个着舰过程属于完全的手动控制过程,较大程度的依赖飞行员的个人技术能力,无法实现自动控制着舰;在此,也同样不做光学助降系统的引导精度仿真分析。
着舰引导雷达和光电引导系统在着舰引导中,可以与机载自动飞行控制系统(自动驾驶仪)相铰链,自动控制着舰飞机进场着舰,因而避免了因飞行员驾驶操作不当所造成的失误,提高了着舰效率和安全性;并且可以根据实际飞行环境,自动着舰模式可切换为半自动或人工着舰模式;因此,有必要对上述两个设备进行引导精度仿真分析。
3.1 舰船运动及引导设备稳定模型的建立
在浪涌的作用下,舰船产生运动,该运动实际上可视为平稳随机过程,因此可以使用白噪声通过与功率谱相对应的成形滤波器的方法,得到时间域中舰船的俯仰运动θs,滚转运动φs和升沉运动hs。
在舰船由海浪引起运动时,如何按照一定的规律进行补偿,完成引导设备的相对于海平面的稳定,是需要考虑的问题,通常使用的稳定模型有惯性稳定、线稳定、点稳定、角稳定和相位补偿稳定等几种模式。惯性稳定模型是指保持引导设备在惯性空间中绝对稳定,亦称点和线稳定,因为惯性稳定模型是正常工作中采用的稳定模型;所以,在本文仿真分析中,采用的是惯性稳定模型。
3.2 飞控系统模型的建立
本文主要在自动着舰模式下进行引导精度的仿真分析,因此,在图3中,所示的飞行员的操作环节可以省略,引导系统的控制率数据直接与舰载机的飞控系统铰链。在仿真分析中,采用美国的A-7E舰载机着舰状态的相关参数[3],飞控系统的数学模型如图3所示。
图3中,自然飞机动力学的传递函数为
飞控系统的油门控制律为
采用根轨迹法可设计油门控制律的PID参数。
3.3 引导系统控制率模型的建立
本文引导设备采用的是惯性稳定模式,该模式也是在舰载机引导系统正常工作中首选的方案。则引导设备惯性方案的理想下滑道运动方程为
则惯性稳定引导系统控制律模型如式(4)所示:
3.4 引导设备测量模型的建立
在舰载机自动着舰过程中,着舰引导雷达和光电引导系统能在舰载机着舰过程中实现与飞机驾驶仪铰链的闭环控制,所以,在仿真过程中还需要建立上述两个设备的测量仿真分析的模型。
着舰引导雷达及光电引导系统均是对进入着舰理想下滑道的飞机进行位置(俯仰和方位)和距离的测量,通过解算后与理想下滑道的控制目标值对比,得出偏差值hb作为飞控系统控制输入∆Η̇c。
3.4.1 着舰引导雷达的测量模型
测量精度是着舰引导雷达的主要指标之一,它表明了着舰引导雷达测量误差的分布范围,其测量误差满足正态分布N(0,σ2);测量精度可以按照下面的公式估算[4]:
式
(5)和式(6)中,c为光速,β为信号有效带宽,SN为信噪比,θ为雷达波束宽度;确定测量精度后,运用随机数的方法即可模拟出当前的测量误差。
3.4.2 光电引导系统的测量模型
由于本文只讨论光电引导系统在着舰引导系统中的作用,所以需要较为详细的进行光电引导系统测量精度及误差的分析;光电引导系统的主要测量误差源及分布如下:
1)光电引导系统伺服机构误差模型
光电引导系统搭载在伺服控制转台上,由于制造工艺、装配和调整使用等因素的影响,会引入各种因素的测量误差,伺服的误差主要是指调平误差、水平误差、视准轴误差、编码器误差等,各种误差的表示及分布模型如表1所示。
2)光电引导系统传感器探测误差模型
光电引导系统的探测传感器包括高分辨率电视、红外热像仪和激光测距/跟踪仪共三种类型;上述三种传感器结合伺服转台,均可完成对着舰飞机位置(俯仰和方位)的测量,而对着舰飞机的距离测量,则由激光测距/跟踪仪完成,其误差包括电视/红外传感器的像面点位置测量误差、激光四象限跟踪误差、激光测距误差等,各种误差的表示及分布模型如表2所示。
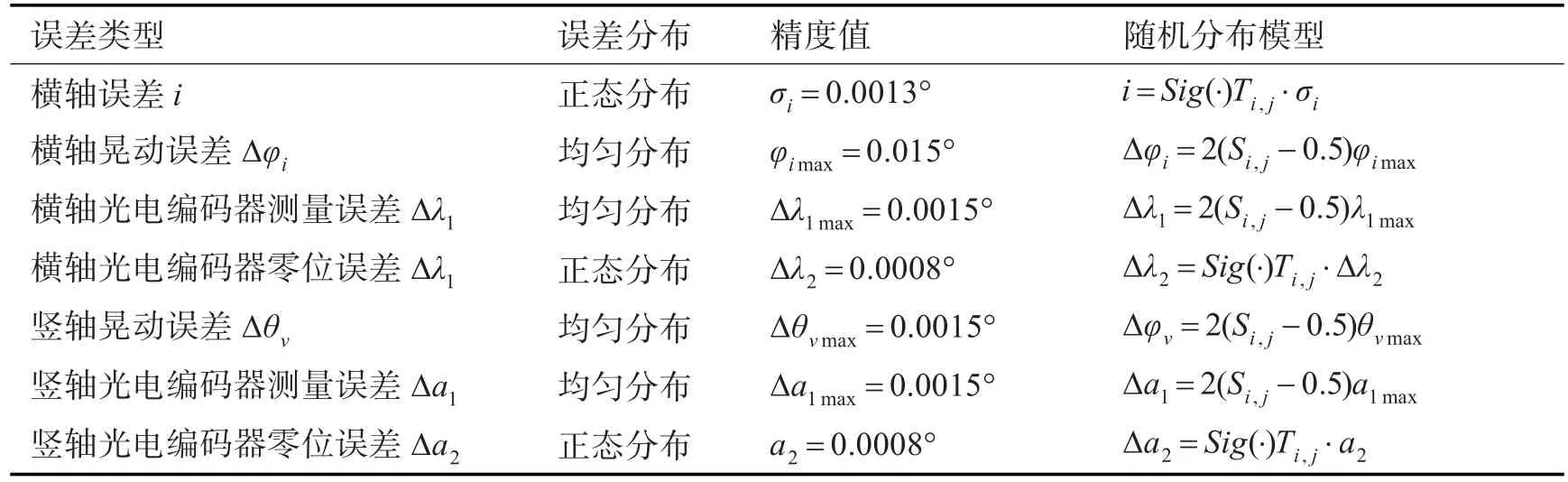
表1 伺服机构误差模型
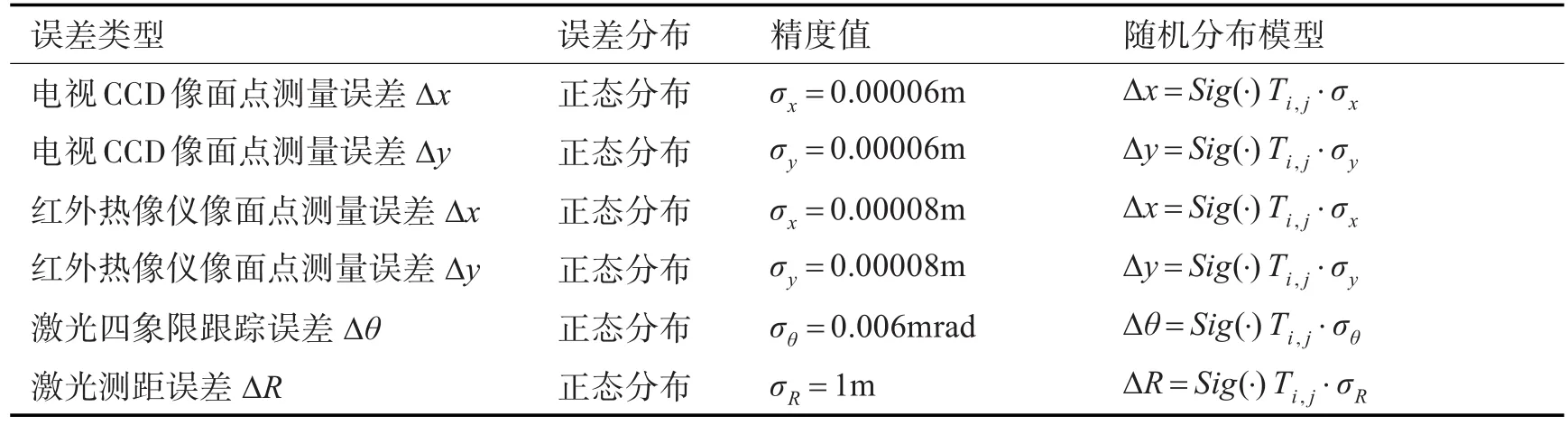
表2 光电引导系统探测传感器误差模型
光电引导系统的上述误差,同样运用随机数的方法,产生相应的均匀分布的随机数序列Si,j和正态分布的随机数序列Ti,j进行仿真。
4 仿真结果
仿真的初始条件是:舰载机在约3km处转入下滑道,飞机高度约210m,速度约为67m/s,下滑道角度为4°;分别由着舰引导雷达和光电引导系统探测到的舰载机位置、距离数据进行引导控制,其仿真结果如下。
4.1 航迹控制仿真结果
根据仿真初始条件,着舰引导雷达的仿真俯仰图如图4所示,方位图如图5所示;光电引导系统的仿真俯仰图如图6所示,方位图如图7所示。
4.2 理想着舰点仿真结果
根据动态仿真图,给出了基于着舰引导雷达和光电引导系统纵向、横向的着舰点误差,其中,着舰引导雷达着舰点误差统计如表4所示,光电引导系统着舰点误差统计如表5所示。
5 结语
通过上述结果可知,着舰引导雷达可提供较高精度着舰飞机方位、距离等引导数据,并可以实现与飞机驾驶仪的铰链,在典型的舰船运动条件下,可以将着舰点误差控制在±13 m(纵向)和±3m(横向)的安全范围内,能有效实现自动进近着舰,并且其全天候能力强,是自动进近着舰引导不可或缺的主导设备。

表4 着舰引导雷达着舰点误差统计(单位m)

表5 光电引导系统着舰点误差统计(单位m)
光电引导系统与着舰引导雷达相比,可以提供更高精度的着舰飞机方位、距离等引导数据,在远距离进近阶段,通过电视/红外/激光测距等复合引导手段,可有效完成舰载机自动引导功能,与着舰引导雷达形成有效的互补;特别是在精密进近和着舰阶段的引导过程中,通过其激光自跟踪功能的高精度测量,能有效解决着舰引导雷达在末端精度下降的问题,完成自动引导和着舰点误差控制的效果更好,尤其是解决着舰阶段精密引导问题的重要手段。
[1]薛海中.飞机着舰引导及监视系统技术[M].郑州:河南科学技术出版社,2009.
[2]McCabe M J.Landing signal officer reference manual[M]. Washington DC,USA:Naval Landing Signal Officers School,1999.
[3]Durand T S,Teper G L.An analysis of terminal flight pathcontrol in carrier landing[R].AD606040,1964.USA AD 1964.
[4]刘义乐,曹钰,徐宗昌.基于图论的装备维修仿真模型[J].系统工程理论与实践,2003,23(8):110-113.
[5]黄勇.航母光电着舰引导系统[J].现代舰船,1995(6):35-38.
[6]杨一栋.舰载机着舰引导技术译文集[M].北京:国防工业出版社,2003.
[7]胡寿松.自动控制原理(4版)[M].北京:科学出版社,2001.
[8]杨一栋.舰载飞机着舰引导与控制[M].国防工业出版社,2007.
[9]吴文海,拜斌,范海震等.基于光电引导的全天候自动着舰模式研究[J].飞行力学,2013,31(2):126-129.
[10]彭兢,金长江.航空母舰尾流数值仿真研究[J].北京航空航天大学学报,2000,26(3):340-343.
[11]张明廉,徐军.舰载飞机自动着舰系统的研究[J].北京航空航天大学学报,1994,20(4):386-391.
[12]李英杰,吴文海,韩维元.舰载机自动着舰导引的相关技术[J].飞机设计,2004(3):61-64.
[13]倪树新.舰载机着舰引导系统的体制研究[J].电光系统,2002(2):8-19.
Analysis of Electro-optical Guidance System Used in Carrier Landing Guidance
LI Xilong1FAN Haizhen2SHI Huili2
(1.Equipment Departure of Naval Aviation Academy,Huludao125001)(2.The 27th Research Institute of CETC,Zhengzhou450047)
The paper introduces the function of main guidable equipments used in the process of carrier-base plane landing guidance,constructing the simulation model of vectoring system,and simulates automatic carrier landing control hinging on the flight control system for carrier landing guidance radar and electro-optical guidance system.The paper analyses the influence of electro-optical guidance system in the carrier landing guidance according to simulation result.
carrier landing guidance,electro-optical guidance system,optical landing system,carrier landing guidance radar,television reconnaissance system,simulation
TN967
10.3969/j.issn.1672-9730.2017.07.036
2017年1月8日,
2017年2月26日
李喜龙,男,高级工程师,研究方向:航空工程。范海震,男,硕士,研究员,研究方向:光电导航。史会丽,女,硕士,工程师,研究方向:光电导航。
