舰船装备全生命周期试验数据采集方法研究
2017-08-07毛杰
毛杰
(91917部队北京102488)
舰船装备全生命周期试验数据采集方法研究
毛杰
(91917部队北京102488)
针对当前舰船武器装备试验数据采集手段缺乏,难以有效评估武器装备效能这一实际工程问题,论文分析了舰船装备试验数据采集现状,提出了合理的数据采集与分析工作流程,给出了情报数据处理性能评估指标体系及计算方法。仿真实验表明了该方法的有效性,可为舰船装备试验指标评估提供指导。
试验数据;数据采集;采集方法;指标;评估
Class NumberTN957;TP274
1 引言
我国在现场数据收集方面的工作起步较晚,尤其对于外场可靠性验证数据的采集与分析工作还没有广泛的开展起来[1~3]。在研制过程中进行的信息采集工作,是由各产品的设计师来自主完成的,存在实践经验少,工作缺乏系统性的问题;同时,由于外场试验的环境条件复杂,经历的时间长,给数据的收集工作带来很多困难。随着信息系统的快速发展,需要一套全面、完善、有效的指标评估系统[4~15]来客观、公正、全面地评估出舰船武器装备情报处理的优劣,为装备的优选竞标提供切实、有效的评估结果。
本文将根据舰船装备试验数据采集现状,针对装备外场可靠性验证的特点,对试验过程中的数据采集和工作流程进行研究。从舰船装备试验数据现状、数据采集与分析工作流程、装备试验数据性能评估指标以及计算方法几个方面进行阐述。
2 舰船装备试验数据采集现状分析
舰船装备试验问题的实质是信息相对匮乏问题,这里相对匮乏并不指用于性能评估的数据绝对没有,而指这些数据无法通过集中的几次系统试验直接获取,但可以断断续续通过对不同种类、不同条件、不同层次的分散的试验信息持续收集获得,当然需要解决这些分散信息的融合和重用问题。分析现行舰船装备试验过程,主要存在以下不足:
1)信息共享能力不足
舰船装备的性能试验、作战试验、在役试验分别处于不同阶段、不同时期进行,每个阶段发现的问题与缺陷,装备研制单位缺乏强有力的数据采集手段实现装备综合试验中产生的参数数据、文档资料、图形图像、视频影音和装备模型等试验信息在各业务分系统间不能充分传递与共享,有时甚至需要人工传递,因此,即使在同一个试验内部,有时也会造成“信息孤岛”,严重制约了武器装备研制和鉴定能力的发展与提高。
2)试验数据采集手段缺乏
定型试验虽然安排了部队作战试验,但是可能会由于试验部队条件有限,缺乏专业作战试验部队以及设备器材,往往只能对作战适用性中的可靠性、环境适应性等少量指标进行考核。
3)缺乏独立的在役考核
由于新型装备体制复杂,专业性更强,对试验人员素质和试验条件要求越来越高,仅仅依靠部分使用部队兼职完成使用试验和考核是远远不够的。
3 舰船装备试验数据采集技术研究
3.1 试验数据采集与分析工作流程
为解决我们侧重于武器装备性能试验,对作战试验和在役考核重视不够的问题,应开展我军舰船装备的全寿命周期、全流程试验与评价工作的研究,特别是对部队使用试验与考核和作战试验应该纳入到舰船装备全寿命周期试验流程。作战试验和在役考核应贯穿于武器系统研制试验的全过程,并可延伸到武器装备部队后的作战训练中,形成独立的试验、数据采集与考核评价体系。通过不同阶段的试验、数据采集、考核评价,不断改进设计,使舰船装备更适合实际作战的需要。舰船装备的全寿命周期、全流程试验与评价工作的研究应当将各阶段试验数据采集方法和手段作为研究的重点,重点研究传统的性能试验数据采集方法,同时开展作战试验数据采集方法和在役考核数据采集方法的研究。
3.2 舰船装备全生命周期试验数据采集规范研究
作战试验和在役考核是对新武器系统的作战效能和作战适用性的全面检验和评价。作战试验和在役考核也会贯穿于武器系统研制试验的全过程,并延伸到武器系统装备部队后的作战训练中,应该形成全面的试验数据指标体系,通过不同试验的数据采集和考核,对舰船装备进行全面评价,使装备更适合实际作战的需要。因此,下节重点研究数据评估指标体系。
数据融合性能评估指标主要分战术指标、精度指标和处理能力指标。其中,战术指标包括:正确航迹率、漏情率;精度指标包括:空间距离精度、速度误差精度和航向误差精度;处理能力指标:处理时延、航迹零碎度、航迹起始时间。为了全面考核多传感器数据融合软件的性能,可以从漏情率、正确航迹率、零碎度、空间距离精度均值、精度标准差、航向误差、航速误差、处理时延、航迹起始时间等几项指标综合考评,再根据各项指标归一化得分加权得出集成归一化综合得分。
4 装备试验数据性能评估指标与计算方法
4.1 评估指标集
1)漏情率
漏情数占真值目标数的比例称为漏情率,计算公式为将漏情率归一化得分百分比
在实装数据融合过程中,需要对各探测数据有一定取舍,如果是常规探测模式,建议该区域采样率最低的探测传感器的三倍周期内被过滤掉的数据不计人漏情,如果是精跟踪探测模式,则小于2倍精跟探测周期内被过滤掉的数据不计入漏情。
2)正确航迹率
正确航迹率为融合输出的目标态势信息中正确表达了真实目标航迹占融合态势输出信息的比例
将正确航迹率归一化得分百分比
在实装全空域量测融合过程中,由于有民航、训练等目标飞机,获取所有的GPS真值的可能性较小,需酌情考虑这些目标在真实航迹中的比例,否则容易被取巧而不能客观、正确反映融合软件性能。
3)零碎度
对于一条真值航迹,对应的融合航迹数目均值为
式中:Qf表示融合势中航迹数目;Q(t)表示真值目标航迹数目。设一条真实航迹在稳定探测发现的情况下,对应融合航迹数门槛指标Lg=10,该门槛指标可结合系统实际情况动态调整。
则零碎度归一化得分百分比
在实装条件下,应根据所有传感器探测情况,如果某批真实目标,在超过60 s或120 s(时间门限可根据实际情况定制)没有任何传感器探测数据时,则需要将该目标再作为一个新真值目标来评估计算。
4)空间距离误差均值
系统航迹的精度指标计算中,均值误差为融合航迹点与对应时刻的真值航迹点之间的空间距离差值。
则第i个目标n个融合点的空间距离误差均值
计算门槛值Mg,从融合航迹中,对各传感器参与融合的融合各自计算空间误差均值,其中最好的为Mg
则融合误差均值归一化得分百分比
5)空间距离误差标准差
系统航迹的精度指标计算中,空间距离误差标准差为系统航迹点与对应的真值航迹点之间的差值。
空间距离误差标准差
计算门槛值Vg,从融合航迹中,对各传感器的参与融合的融合各自计算空间距离误差方差,其中最好的为Vg
则融合误差标准差归一化得分百分比
6)系统处理时延
为了系统(尤其是火力协同打击系统)实时性,必须考虑系统处理时延。系统处理时延指接收某一融合航迹跟踪数据时刻与该数据对应的原始探测数据的接收时刻差,其公式计算式中:ρft为系统处理时延;Mfi为某一点迹对系统航迹更新时刻与收到该点迹时刻之差;n为收到点迹总数目。
计算各条融合航迹处理时延门槛值Tg,考虑到实时性,一般情报预警系统Tg=1.0s(可结合项目的具体情况动态设置阈值)。
则融合航迹处理时延归一化得分百分比
7)航迹起始时间
融合航迹起始时间是指起始时刻与首点时刻之差。
航迹自动起始平均时间根据以下公式计算式中:ρt航迹自动起始平均时间;MTi单批航迹起始时间,为起始时刻与首点时刻之差;n表示仿真过程中总航迹起始次数;计算各条融合航迹最小起始时间门槛值V0和最大起始时间门槛值Vmax。则融合航迹起始时间归一化得分百分比n表示评估指标个数,wk表示某指标的权重系数。
在常规战备值班过程中主要考核是否漏情、目标是否快速及时发现、融合航迹是否正确等,其评估指标权重可参考表1。
4.2 指标权重
指标权重是根据其指标在系统中的关注度、重要性来确定相应的权重系数。
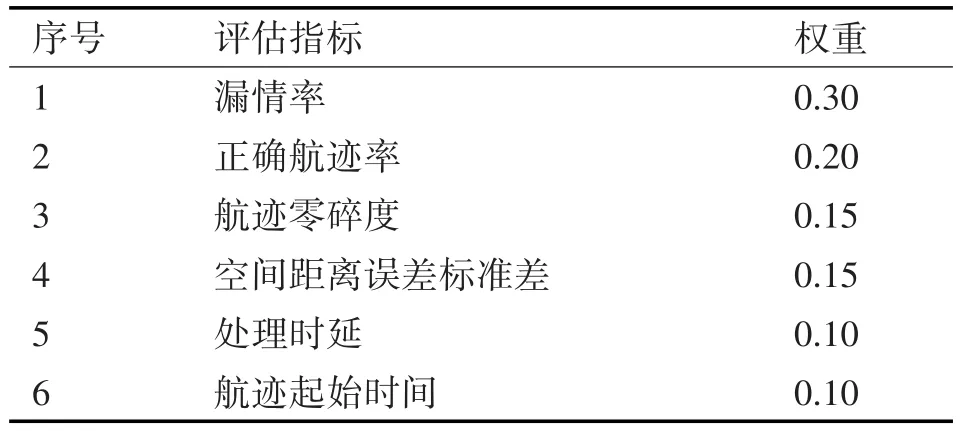
表1 评估指标权重
以上指标权重具有一定普适性,并在工程实际测试过程运用,为了客观、真实地反映出融合评估有效性,可结合实际情况,不同应用领域、不同测试场景、不同关注对象等动态调整各指标的加权系数。
4.3 集成归一化
集成归一化总分是由各项指标归一化得分百分比加权之和,即
式中:F为某一次测试科目集成归一化总分;m为指标总项数;w为某一指标权重系数;P表示某一指标得分归一化百分比,最高位1,该测试科目总分为100分。
5 仿真实验
设两个2D雷达,雷达1初始大地坐标为(116.41,21.85,0.0),雷达2初始大地坐标为(117.10,21.91,0.0),两水面探测平台速度均为10m/s,向正北行驶;两雷达量测误差分布服从N(0,σ2),距离误差σd分别为30m、80m,方位误差σα分别为0.08°、0.2°,采样周期分别为1.5s和2s。模拟仿真三批目标:目标1初始大地坐标为(116.16,22.939,1500.0),目标2初始大地坐标为(116.16,22.924,1500.0),目标3初始大地坐标为(116.16,22.909,1500.0);三批目标并排自西北向东南方向呈编队飞行,各目标间距约1500m,同时做匀速直线运动,航速为100m/s,航向为135°。表2是对情报处理后的数据进行的评估结果。
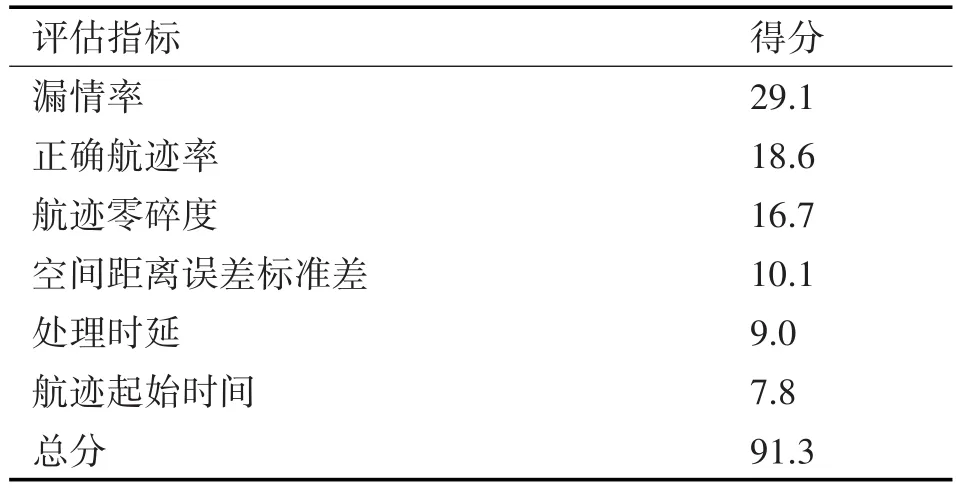
表2 评估结果
通过仿真试验表明,以上描述的试验数据性能评估指标体系能够较为客观、全面、有效地对情报处理软件性能指标进行评估,具有较强的适用性。
6 结语
本文面向舰船装备全生命周期试验数据采集需求,详细分析了舰船装备试验数据采集现状,提出了合理的数据采集与分析工作流程,给出了情报处理性能评估指标体系及计算方法。仿真实验表明了该方法的有效性,可为舰船装备试验指标评估提供指导。
[1]赵文晖.外场试验中可靠性验证数据采集与分析[C]//中国宇航学会发射工程与地面设备专业委员会学术会议,2004:97-101.
[2]赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,1999:62-69.
[3]王永诚,张令坤.多站时差定位技术研究[J].现代雷达,2003,25(2):1-4.
[4]贺国芳.可靠性数据的收集与分析[M].北京:国防工业出版社,1995:82-98.
[5]邹伟,焦纲领,孙倩,王延章.信息融合系统能力综合评价的一种计算方法[J].舰船科学技术,2010,32:45-60.
[6]邹伟,刘兵,孙倩.多源信息融合能力评估关键技术综述[C]//信息融合学术论文集,2009:221-225.
[7]罗蓉,徐红兵,田涛.复杂系统多传感器数据融合技术及应用[J].中国测试技术,2006,32(4):145-160.
[8]D.J.Kewley.一种数据融合系统评估模型[C]//IEEE,1993:123-126.
[9]洪静,林家钧.信息融合系统评价中指标权值的求取和自适应调整[J].传感器世界,2006,3:25-27.
[10]李素民,韩建兴,杜阳华.情报信息处理能力测试与评估技术[J].火力与指挥控制,2008,33(3):103-106.
[11]周永丰,吴汉宝.雷达数据相关器的基本性能测试方法[J].舰船电子工程,2005,25(1):35-40.
[12]李素民,韩建兴,杜阳华.情报信息处理能力测试与评估技术[J].火力与指挥控制,2008,33(3):103-106.
[13]Oliver E.Drummond,Barry E.Fridling.模糊理论在多目标跟踪算法评估方法中的应用[C]//SPIE,1992:248-251.
[14]Barry E.Fridling,Oliver E.Drummond.多目标跟踪算法中的实用测试方法[C]//SPIE,1991:98-102.
[15]孙倩,王延璋,邹伟.基于雷达精度的融合航迹正确性判断[C]//信息融合学术论文集,2009:247-249.
Research on Data Acquisition Method of Ship Equipment Life Cycle Test
MAO Jie
(No.91917 Troops of PLA,Beijing102488)
According to the lack of the data acquisition methods of warship weapon equipment test,and difficulty to evaluate the effectiveness of weapon equipment effectively,this paper analyzes the present situation of data acquisition of ship equipment test,proposes the reasonable data collection and analysis work flow,and gives the performance evaluation index system and calculation method of intelligence data processing.The simulation shows that the evaluated method is valid and can provide guidance for the accuracy evaluation of the fusion track of the model test.
experimental data,data acquisition,collecting method,index,evaluation
TN957;TP274
10.3969/j.issn.1672-9730.2017.07.022
2017年1月15日,
2017年2月27日
毛杰,女,工程师,研究方向:通信工程。
