小天体探测关键技术和特点
2017-08-07高磊探月与航天工程中心
高磊 (探月与航天工程中心)
小天体探测关键技术和特点
高磊 (探月与航天工程中心)
Key Technologies and Characteristics of Small Body Exploration
包含小天体探测任务在内的空间探测任务是当前最为复杂的航天任务之一,实施空间探测需要多方面的技术支持。美国在《2015 NASA技术路线图》中将空间探测任务涉及的关键技术分为15个领域,包括发射推进系统,空间推进系统,进入、下降与着陆系统,材料、结构、机械系统与制造等。每个技术领域都包含了多项关键技术,但大多数技术是所有空间探测任务都需要的。这里重点介绍小天体探测特殊性带来的关键技术,并结合任务中各项技术的应用情况进行详细阐述,包括行星借力及先进推进技术,小天体着陆技术和小天体采样返回技术。
1 行星借力及先进推进技术
小天体探测目标通常距离遥远,实现交会需要的速度增量较大,而行星借力技术和高效先进推进系统可以有效减少燃料消耗,提高任务的可达范围并减少任务的发射成本。因此,近期几乎所有的小天体探测任务都应用了行星借力技术或/和先进推进技术。
行星借力技术
行星借力技术指借助行星的引力调整或改变探测器飞行轨道的技术,采用行星借力技术可以减小星际探测任务发射能量和总速度增量,进而降低发射成本和燃料消耗、增加有效载荷质量,是空间探测的一项重要技术。
行星借力技术通常会大幅度增加探测器的飞行时间,一般适用于轨道与地球轨道相差较大的探测目标,因此通常只有水星、火星以远探测任务以及小行星探测会用到行星借力技术。
在过去进行的14次小天体探测中,只有深空-1任务没有采用借力飞行技术,其他的任务都在主任务或扩展任务期间通过借力飞行实现了轨道的改变。尽管行星借力技术会增加任务的时间,但其可以显著降低任务的燃料消耗,是小天体探测常用的一项技术。要完成精准的行星借力,需要轨道设计技术、测控技术等技术的支持。
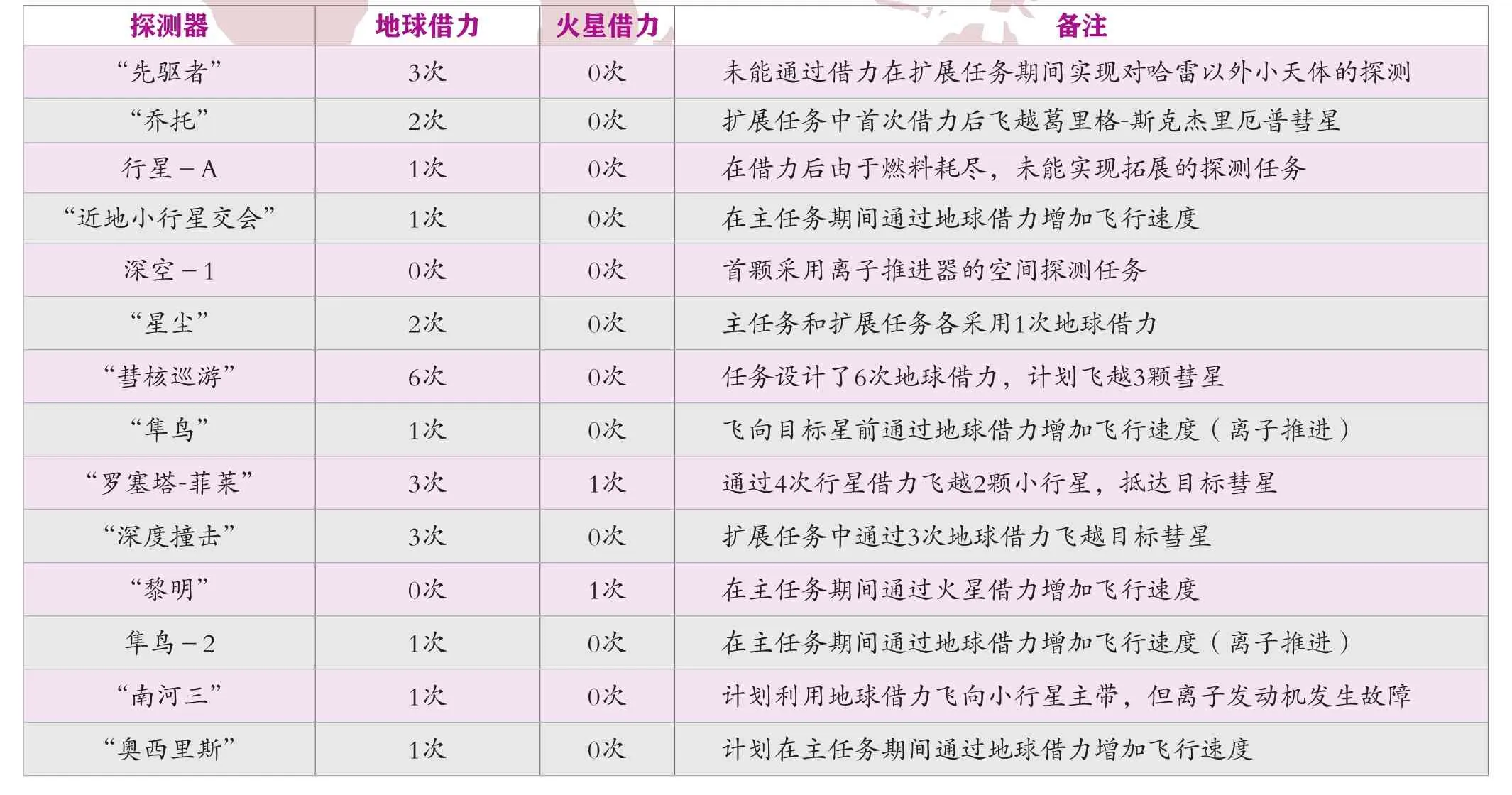
小天体探测器的行星借力
先进推进技术
先进推进方式可以通过增加比冲或其他方式,减少或去除燃料消耗,进而达到减少发射成本、增加有效载荷质量的效果。主要的先进推进技术包括先进化学推进、核推进、电推进、太阳帆推进、微波推进和反物质推进等。大多数先进推进技术仍处于研究阶段,用在实际任务且是近期研究热点的先进推进技术是电推进技术。
离子推进是空间电推进技术中的一种,原理为将工作介质电离,在强电场作用下加速离子并将其喷出,利用离子的反作用力推动探测器运动。由于加速后离子的速度显著高于化学推进中喷射气体的速度,因此单位质量的燃料可以获得更大的速度增量,也就是比冲高、效率高。但电推进同样存在推力小导致飞行时间过长的问题,当前研究的主要方向为如何增加电推进的推力。
目前,美国、日本和欧洲都已经掌握了成熟的电推进技术,并将其应用于空间探测任务中。其中,美国和日本在小天体探测任务中采用了离子发动机,包括深空-1、“黎明”、“隼鸟”和隼鸟-2。

小天体探测中采用的电推进技术
2 小天体着陆技术
不同于月球和火星,小天体的引力非常微弱,且没有大气,因此小天体探测对于着陆技术的需求与火星等大天体的着陆技术完全不同,需要通过精确的推力控制实现零速度着陆。为实现这一目标,需要掌握探测器自主导航、制导与控制技术,缓冲吸能部件方案选取和设计,锚定机构技术等。探测器自主导航、制导与控制技术可以解决通信延迟、小天体可知信息少等问题;缓冲吸能部件可以吸收探测器相对于小天体表面的冲击能量,防止探测器反弹飘走;锚定机构技术同样是应对探测器反弹飘走的情况,通过锚定机构将探测器固定在小天体表面。
目前,只有美国的“近地小行星交会”、日本的“隼鸟”和欧洲的“罗塞塔-菲莱”等3个探测器实现了完全不同方式的小天体着陆。
“近地小行星交会”的着陆技术
美国“近地小行星交会”原本执行一项小行星环绕任务,并没有设计着陆装置,其构型为普通的卫星构型,拥有展开的太阳能电池板。但美国航空航天局(NASA)的科学家在任务末期为“近地小行星交会”探测器增加了软着陆任务,通过一系列的轨道降低和精确控制完成了小天体表面的软着陆,着陆速度约为1.5~1.8m/s,实现了首次小行星软着陆,并在小行星表面工作了数天时间。
“隼鸟”的着陆技术
日本“隼鸟”完成了小行星的采样返回,但其着陆不同于传统意义上的着陆,可以描述为点触式的接触。实质上,“隼鸟”携带了一个迷你着陆器,即跳跃式机器人“密涅瓦”(MINERVA)。按照原计划,“密涅瓦”将利用小行星低重力的特点进行跳跃式前进,穿行小行星的表面并进行拍照。但由于释放位置发生偏差,最终“密涅瓦”没有着陆在小行星表面,而是成为了一颗环绕小行星的卫星。“隼鸟”探测器本身则与小行星表面进行了短暂接触,在接触时收集了小行星表面的样品。“隼鸟”探测器为了着陆在引力非常弱的小行星上,采用了自主导航与路标技术。具体方法为:在距离小行星表面100m处,抛下一个导航路标进行自主导航。导航路标被安装在底座上的闪光灯照亮,使宽视场相机的照相与闪光灯的闪光同步。导航路标像一种充满玻璃球的软包,所以它具有较小的反弹系数,能避免路标被弹起。
“罗塞塔-菲莱”的着陆技术
欧洲“罗塞塔-菲莱”彗星探测器则实现了真正意义上的小天体着陆,即释放着陆器“菲莱”使其着陆在目标彗星上并开展科学探测。“菲莱”着陆器为了克服彗星引力小带来的问题,采用了腿式缓冲机构和叉钩技术。由于将要探测的彗星引力很小,根本不用火星着陆器那样的安全气囊作为缓冲。为防止探测器在彗星表面着陆时被弹出去,科学家们将着陆器缓冲装置设计成3条“腿”,在与彗核接触瞬间,3条“腿”可吸收掉大部分撞击,起到缓冲作用。一旦同彗核接触,着陆器立即伸出一个叉钩,将自己固定在彗核表面。
不幸的是,“菲莱”着陆器以大约1m/s的相对速度着陆彗星表面后,由于推进器和鱼叉装置失效,着陆器反弹了两次并最终停留在一个被遮蔽的区域。着陆器在着陆后进行了一些探测,并通过轨道器向地球传输了信息。之后,着陆器在电池用尽后进入了休眠状态。
3 小天体采样返回技术
小天体采样返回与火星等大天体采样返回具有一些共同的技术,例如样品罐密封技术、再入返回技术等,同时也具有一些特殊的技术。由于小天体引力微弱,小天体采样返回可以采用接触的方式进行采样,而不用在完全着陆之后进行采样,从而降低燃料消耗。因此,如何在有限接触时间内实现采样是小天体采样返回所面临的主要问题。目前,小行星采样主要采取了喇叭状的采样器,在接触时通过发射抛射物等方式使小行星表面溅起表面物质,并收集样品,“隼鸟”、隼鸟-2和“奥西里斯”都采用了类似的技术。“星尘”探测器则不同,只是在飞越彗星时利用气凝胶收集彗星的尘埃粒子。
“星尘”的彗星采样技术
尽管美国“星尘”彗星探测器以缓慢的速度接近威尔德2号彗星,但两者之间的相对速度仍达到6.1km/s。在这样的情况下,收集彗星物质相当困难,因为这些尘埃粒子很容易穿透收集器。为解决这个难题,科学家发明一种物质,称为气凝胶。这种物质是目前世界上最轻的固体材料,密度比玻璃低1000倍,是海绵状的玻璃。粒子撞击后,在气凝胶内产生胡萝卜状轨迹,使粒子停下来,即可以捕获和保存高速彗星物质粒子,还不影响粒子本身的特性。
采样罐是一个铰链蛤壳式机械装置,飞经彗发时,蛤壳打开,伸出采样板;完成样品收集后,采样板缩回密封舱,蛤壳自动关闭并密封。“星尘”探测器利用气凝胶,即低密度惰性多孔硅胶基质的物质进行样品收集,能够在最小限度的物理和化学变化下捕获高速微粒。气溶胶为简单的硅胶基质的薄片,由模块化的铝单元格携带并部署在桨上。采样期间,气溶胶将暴露于空间中,在其他时间将被储藏在样品库中。
“隼鸟”的小行星采样技术
日本“隼鸟”是首个实现小天体表面采样返回的探测器,其采样装置采用了喇叭状的设计,从探测器的底端伸出。采样装置的内部装有小的金属球,在探测器接触到小行星表面时,采样装置将发射金属球撞击小行星表面,使表面溅起碎片样品,然后将样品收集到角状容器中并装入密封舱内的容器中。
隼鸟-2的小行星采样技术
日本隼鸟-2采用了与“隼鸟”相似的设计。隼鸟-2将在小行星上进行3次采样,其中前2次将直接在表面进行采样,第3次则将从小型便携撞击器造成的撞击坑中采样。典型的采样过程如下:首先探测器命令接近选择的采样区域,在100m高度探测器将进入自主模式并很快释放信标着陆在目标区域,在30m高度探测器将与信标排成一线并很快接近表面并完成接触;1m长的喇叭状采样器将覆盖目标区域,钽抛射物将撞击表面,将材料溅射至采样摇臂上,材料将进入3个储存罐中的1个,之后储存罐将被密封。然后,探测器将飞离表面并继续进行科学探测。
“奥西里斯”的小行星采样技术
美国“奥西里斯”将不会在小行星上登陆,而是尽量接近小行星,然后在5s的相互接触过程中收集样品。洛马公司设计了一种反向真空系统“快速样品获取机构”(TAGSAM)。“快速样品获取机构”将喷射出氮气,使小行星表面的岩石和尘埃被激起并被吹入位于铰链式机械臂末端的采样头中。当采样收集器接触小行星表面时,“快速样品获取机构”外部的表面接触板也将收集微粒物质。样品将被存储在“采样返回舱”中的容器内。“快速样品获取机构”有3个独立的气体瓶,可以进行3次采样尝试。尽管这是一项新技术,但是对其采样头进行的真空和微重力实验证明其具有采集60g样品的能力。
4 小天体探测特点
小天体探测科学目标集中于成分构成
小天体探测的顶层科学目标为研究太阳系、行星、宇宙的形成与演化,探测生命的起源与发展,为此需要研究小天体的成分构成,进而研究小天体的形成与演化过程,得知太阳系形成早期的过程,并研究生命起源与小天体水、有机物之间的关系。为实现对小天体成分构成的探测,小天体探测经历了远距离探测、表面原位探测阶段,已进入采样返回并进行详尽研究的阶段,未来探测将重点研究小天体的内部构成、水和有机物质。
小天体探测项目规划多包含试验目的
小天体探测的科学意义重大,很多近地小天体具有良好的接近性,探测难度较低。在包含科学探测目的的基础上,美国和欧洲对于小天体的定位都属于新技术试验的绝佳场所,美国过去的小天体探测任务均为小型任务,在进行科学探测的同时试验了大量设计方案和新型技术,并且未来的多次小行星探测任务都将为载人火星探测任务奠定技术基础;而欧洲的“罗塞塔-菲莱”任务是欧洲航天局开展空间探测任务的基石任务之一,验证了多行星借力、彗星表面着陆等多项技术。日本起初为“隼鸟”任务设定的目标也是进行多项技术试验。因此,各国在小天体探测项目规划时,除了科学探测和占领先机的政治意图以外,多考虑为后续任务试验一些新方案和新能力。此外,小天体探测的实施还包含了演练军事技术的含义,在小天体表面实现着陆和采样操作可以验证“寻找非合作目标”等军事能力和技术。
小天体探测任务的复杂程度不断提高
小天体探测方式经历了飞越、环绕、着陆和采样返回等多个阶段,目前探测任务的复杂度仍在不断提高,未来规划的探测任务主要形式为采样返回任务,同时还有美国的载人小行星探测任务。随着小天体对地球的撞击威胁受到更多关注,未来小天体摧毁/轨道偏转等任务也成为了研究的热点。此外,任务的科学探测内容和操作难度也在不断增加,以辅助获得更多的科学探测成果。
小天体探测技术要求集中于精确控制
小天体探测,特别是近地小天体探测的难度并不大,其对于任务设计、发射、推进、通信等能力的要求相对较低。小天体探测的关键技术主要集中于解决如何着陆、如何实施采样返回等问题,这就需要精确自主导航、采样等对探测器进行精确控制的技术。日本在运载、推进等方面的能力并不强,但其掌握了微重力下通过精确控制接近小行星、采样并返回的能力,成功实施了首次小行星采样返回任务。未来小天体探测技术将仍重点关注着陆技术和采样返回技术。
