一种真圆型隧道激光扫描断面变形检测新方法的研究
2017-08-01尤相骏
尤相骏, 成 俊
(1. 上海数联空间科技有限公司, 上海 200433; 2. 昆明轨道交通集团有限公司, 云南 昆明 650011)
一种真圆型隧道激光扫描断面变形检测新方法的研究
尤相骏1, 成 俊2
(1. 上海数联空间科技有限公司, 上海 200433; 2. 昆明轨道交通集团有限公司, 云南 昆明 650011)
本文介绍了一种基于高密度三维激光扫描仪的高精度快速全断面变形检测新方法——Tunnelscan隧道扫描测量系统, 该系统采用扫描仪绝对定位法进行点云配准和隧道控制坐标系坐标传递,使用与断面点距离最小的最小二乘法进行隧道实测断面中心点计算和基于与参考断面的断面差环状过滤器进行隧道点云切片杂点过滤,通过多次过滤、拟合迭代后获得去噪后的真圆管环实测断面。该系统还通过参考断面轮廓线投影法将三维点云投影成激光雷达隧道正射影像,为实现隧道结构安全“全面检测”提供了一种全新用户成果类型,用于全面分析隧道断面变形、结构侵界和裂缝渗水等隧道病害。采用该方法在昆明地铁3号线马眠区间做了一段竣工测量实地测试,经过总体分析后,再按图索骥去找断面变形量较大里程的断面图可谓是事半功倍,非常适合地铁隧道变形检测大数据量的批量化分析,而且成果查看比直接在三维点云或者三维模型上分析更加直观,没有视角遮挡问题。
隧道; 断面变形检测; 激光扫描; 轴线测量; 点云绝对定位法; 激光雷达隧道正射影像; 隧道病害
0 引言
使用盾构法施工的真圆型管环隧道的变形监测和检测是地铁建设和运营中一个难点问题。文献[1-3]采用的检测方法都需要在被检测的隧道断面上预先布设测点和传感器,且是对隧道断面进行抽样检测,因此对于整条隧道的结构安全检测需求来说,存在空间分辨率不足的局限。
随着三维激光扫描技术的快速发展,利用三维激光扫描仪高速扫描获取高密度隧道断面点进行隧道全断面测量和变形检测越来越成为一种发展趋势。文献[4]采用FARO Focus3D扫描仪获取隧道三维点云和RealWorks软件截取断面输出到CAD中进行断面半径量取并与全站仪测量数据比对,验证了三维激光扫描仪断面测量数据的有效性和可行性。文献[5]将隧道点云数据分割成等间距切片,利用多点坐标平差计算圆心的方法求取切片圆心和半径,对拟合的圆环与设计值进行比较获取管环的收敛变化情况。文献[6]以隧道设计中轴线为基准提取隧道横断面,并结合扫描仪获得的影像数据进行断面收敛、渗水和裂缝等分析,表明采用该检测技术能够得到可靠的隧道检测信息。文献[7]采用圆柱面拟合法获取隧道管环的实测轴线,运用误差分布统计规律对截取的管环点云切片进行粗差剔除降噪,然后对降噪后的点云切片采用椭圆拟合法建模得到管环在断面360°各个分段的变形值,并通过与全站仪断面测点的椭圆拟合结果对比,验证了地面三维激光扫描技术在隧道断面变形测量中的可靠性。文献[8]采用基于几何特征点与ICP算法相结合的点云数据配准方法对多站点云数据进行配准,配准数据经去噪、精简后建立Nurbs曲面三维模型,最后对隧道2期扫描数据模型进行三维空间叠加分析,得到隧道部分纵横断面上的整体位移量。文献[9-11]通过对隧道点云在水平面上投影后搜索的上下边缘点分别拟合二次曲线求均值得到隧道中轴线。其中: 文献[9]对提取出具有一定厚度的管环点云断面切片根据管环断面的360°点位分布采用局部分段二次曲面拟合法计算管环半径R;文献[10]以等间距从管环点云提取断面后,用椭圆拟合法分析椭圆长短轴变化来分析环管变形;文献[11]以等间距截取管环点云后,用基于隧道设计半径的粗滤噪法和基于多项式拟合的精滤噪法对点云去噪后,对管环多期扫描点云的数字表面模型进行叠加对比分析环管形变。上述研究中的隧道多站扫描数据坐标系统一,都是基于多站扫描数据先两两拼接(与参考文献中“配准”意思相同)成一个整体隧道点云后,再在两端传递已知的隧道控制坐标系坐标。这种方法存在传递了隧道控制点坐标后的隧道点云数据在隧道两端的扫描数据坐标精度高、中间扫描数据坐标精度低的问题,而且随着已知控制点间隔扫描测站数的增加,中间的扫描站数据坐标精度会持续快速降低。
本文介绍了一种基于Tunnelscan隧道扫描测量系统的新型断面变形检测方法。该方法采用“点云绝对定位法”[12],不用先对多站扫描数据进行拼接,直接对每个扫描测站数据进行扫描仪相对坐标系统到隧道统一控制坐标系之间的转换,实现多站扫描数据坐标系统的统一,且每站点云的坐标精度与最近的隧道控制点精度接近,不会快速衰减。然后使用与断面点距离最小的最小二乘法拟合断面中心和基于与参考断面的断面差环状过滤器过滤断面杂点的方法获得不断优化的隧道实测轴线和断面点云。该系统还通过参考断面轮廓线投影法将三维点云投影成可量测的激光雷达隧道正射影像,为实现隧道结构安全“全面检测”提供了一种全新的用户成果类型,用于全面分析隧道断面变形、结构侵界和裂缝渗水等隧道病害。
1 隧道扫描点云的配准和控制坐标传递
“激光扫描法”外业采集方式形象地说,就是一种“超级免棱镜自动全站仪法”,即采用1台类似免棱镜马达全站仪采集形式的三维激光扫描仪来快速获取一段隧道(通常对φ5.5 m地铁盾构隧道而言,每站检测的隧道长度为30~50 m)在隧道壁上反射回来的高密度毫米级点间距的具有三维坐标的激光点云(一般在4 000万个点以上)。通常多站扫描需要通过多站点云拼接形成整体点云后再转换成隧道控制测量坐标系坐标[4,7-8],进而与输入的隧道设计中轴线坐标序列以及隧道里程等数据发生联系,再提取隧道断面等后续数据处理。
Tunnelscan隧道扫描测量系统采用的“点云绝对定位法”[12]原理是将每站的扫描仪相对坐标点云通过已知隧道控制坐标系坐标的3个控制点,直接转换到隧道控制测量坐标系中,无需进行多站拼接。
具体做法是: 扫描仪上加装特殊装置,安装2个与扫描仪相对位置固定的测绘棱镜,在扫描仪外5~10 m处放置1个半球棱镜标靶,如图1所示。
每站扫描仪架好后,在100 m左右通视范围内隧道控制点上设站定向好的全站仪对上述3个点按照“左1,右2,球3”顺序测量,“左右”是相对于隧道大里程方向而言,“球”指靶球棱镜。靶球棱镜的球面朝向扫描仪,棱镜面朝向全站仪。全站仪测量每个扫描测站的上述3个控制点坐标,命名为“X1”,“X2”,“X3”,“X”为扫描仪测站编号。扫描仪完成360°扫描,全站仪完成3个点测量后,扫描仪即可搬站到下一站,只要全站仪和扫描仪之间通视且距离不超过100 m,全站仪不用搬站。扫描仪与全站仪之间不通视时,全站仪需搬站到下一个与扫描仪通视的已知测站上设站定向,然后测量每个扫描站的3个定位点。
通过上述的点名规则编号,后续软件处理时,可以自动将点云文件与3个定位点的坐标发生关联,自动解算出这3个点的扫描仪相对坐标系到隧道控制测量坐标系的转换参数,然后将所有扫描仪测站“相对”坐标系下的点云转换成具有隧道控制坐标系下的“绝对定位”点云。
该方法特点是: 外业扫描仪数据采集速度快,操作简单,各站之间不需要设置公共标靶点,可以从任意隧道里程开始或结束扫描,不需要各个扫描站之间相互重叠。外业数据采集典型时间是每站5 min(包含行走和设站时间),如果仅检测断面,某些扫描仪实际采集时间更短,如Amberg Profiler5033,设备实际数据采集时间仅为1.5 min,加上搬站和行走时间一般不超过4 min。

(a) 点云绝对定位法现场作业俯视图

(b) FARO X130绝对定位法现场照片
图1 点云绝对定位法现场作业俯视图和FARO X130绝对定位法现场照片
Fig. 1 Overview map of onsite absolute positioning method of point cloud and onsite photo of FARO X130 absolute positioning method
2 断面提取、杂点过滤和轴线拟合
内业数据处理时,Tunnelscan软件将隧道的设计中线(平曲线和竖曲线)、设计断面和断面里程分配表等隧道设计数据事先输入软件作为参考隧道模型。Tunnelscan的断面对比分析模式有2种,一种是“实测VS设计”,另一种是“实测VS实测”。两者应用场景不同,但断面对比的依据都是里程相同。“实测VS设计”模式对比出的隧道断面差异反映出的是管环安装时的拼装变形,“实测VS实测”模式对比出的结果则反映出2次实测之间管环的变形收敛情况。
通常第1遍断面提取是以隧道设计轴线或者盾构中心线作为初始参考轴线,正交截取等间隔d具有一定厚度d0的断面点云切片,然后压薄成切片中心里程处与隧道轴线切向平行的三维坐标系坐标[Xi,Yi,Zi]2[10]。此时,如果用图2所示Mi里程处隧道断面坐标系表示点云i(Pxi,Pyi),Pxi和Pyi分别为断面坐标系横纵坐标,则有:Pxi=Yi,Pyi=Zi,Mi可以使用点云点i在隧道控制坐标系坐标[Xi,Yi,Zi]1[10],在隧道平曲线上求投影点算法获得,这里不作详细展开。


在实测断面中心与设计断面中心套合的前提下,Pzi反映了实测断面的几何变形。如果将2次断面扫描获得的实测断面中心套合,则2次Pzi的差值ΔPzi反映了2次实测断面的几何变形。
Tunnelscan软件将第1次实测断面拟合好的优化实测轴线作为参考轴线输入后,使用“实测VS设计”模式来分析2次实测断面变形的差值。如果要分析2次断面测量所得断面的水平和垂直位移,则应保持原来的参考轴线不变,采用“实测VS实测”模式,比较2个实测断面的中心点纵横坐标差值,就可以获得断面的水平和垂直位移值。

图2 隧道断面坐标系中的设计和实测断面对比图
Fig. 2 Measured cross-section and design cross-section under tunnel cross-section coordinate system
Tunnelscan软件中还以Pzi值来设置以设计断面为参考的环状过滤器。图3是环状过滤器过滤真圆型隧道点云的示意图,红色为设计断面,以Pzi∈[-0.05 m,+0.05 m]来设置该环状过滤器(粉色),该环以外部分的点云将被滤除。最后只剩下环内绿色的实测点云被保留进行后续数据处理。真圆隧道管环的变形一般不超过0.03 m,所以当实测断面中心与设计断面中心套合后,将该环状过滤器设置为Pzi∈[-0.03 m,+0.03 m]即可过滤掉隧道壁以外的断面杂点。
Fig. 3 Sketch of filtering mechanism of projectionZpoint cloud filter referenced by design cross-section
Tunnelscan软件中以“与断面点距离平方和最小”的最小二乘算法求解拟合断面中心点O坐标(Xo,Yo),用矩阵形式可表示为:V=[Pxi-XoPyi-Yo]T,VTV=min。
每次根据新拟合出的断面中心又可以设置新的更小范围的Pzi进行过滤,过滤后的断面点再次拟合出更优化的断面中心点,如此迭代直到最后新拟合出的断面中心点的坐标不再发生变化。对于实际轴线与设计轴线偏差小于0.1 m,且断面变形没有超过5 cm变形的真圆隧道而言,这样的断面点过滤和中心拟合过程重复3次即可获得稳定的断面中心点和去除隧道管线和杂物的隧道壁断面点集。
当实际隧道轴线与输入的初始设计轴线之间整体偏移量较大时,先不设置环状过滤器,直接拟合实测隧道轴线,作为参考轴线输入后,再设置范围较大的环状过滤器进行杂点过滤。
3 断面差值法和椭圆拟合法分析断面变形量
经过断面提取、杂点过滤和中心轴线拟合处理,将最后优化拟合的实测隧道轴线作为参考轴线提取得到隧道壁上的断面点用作断面变形分析。
断面变形分析的方法有真圆拟合法[5]、基于最小二乘的椭圆拟合法[7,10]和分段圆弧拟合法[13]等多种分析方法。
Tunnelscan软件自带的断面变形量分析方法是基于断面中心辐射线的断面差值法,使用ΔPzi来评估隧道断面变形,并使用断面图和激光雷达正射影像图2种方式进行断面变形分析和报告输出,让用户先通过正射影像图断面变形量分析报告对整条隧道变形量范围和部位一目了然,然后再按图索骥,具体查找断面变形图。
作者参考文献[14]使用VC++开发了基于最小二乘的椭圆拟合法来分析断面的变形量。
设断面点坐标为(xi,yi),则有通用椭圆方程式(1)出发得到式(2),根据式(2)求全微分得到式(3),将式(3)改换为矩阵算式(4)。
(1)

Dxi+Eyi+1)2=min;
(2)

(3)
Ma·Md=Mb。
(4)
式中:

对(4)进行矩阵运算可解算出A、B、C、D、E。
椭圆中心坐标(xc,yc)、长短半轴长a、b和椭圆短轴与Y轴顺时针夹角θ:



4 激光雷达隧道正射影像
“激光扫描法”所获得的点云数据中不仅包含了隧道内壁的几何位置信息,还有扫描激光照射到隧道内壁后反射回来的激光反射强度数值。利用这项数据, Tunnelscan软件可以生成2 047个灰度分阶,并投影到隧道设计模型内壁的“激光雷达隧道正射影像”。该影像就是将激光扫描隧道内壁所获得的每个点的反射强度变成一个可以贴在实际隧道对应位置上的灰度像素,这样成千上万的前后上下相邻的像素就构成了一幅与隧道内壁可以无缝贴合的1∶1尺寸比例的灰度影像图。形象地说,该灰度影像图就像是矿泉水瓶上的标签一样,贴在事先输入好的隧道设计模型上。
图4为将该影像在隧道轴线正下方处沿隧道轴线方向剪开后展开的1∶300比例尺灰度影像图。图5(a)示出隧道内壁激光雷达正射影像展开后与隧道壁各部位的对应关系,图5(b)示出图4中纵坐标刻度在设计断面轮廓线上与设计轴线正上方红点的轮廓线长度值。对于盾构法真圆型隧道,将实测隧道轴线作为设计轴线,用真圆断面轮廓线输入软件投影后得到的激光雷达隧道正射影像具有与实际隧道壁尺寸大小一一对应的特性。因此,该激光雷达隧道正射灰度影像图可用作隧道内壁裂缝、渗水等异状检测和真实隧道信息三维模型化,也可以作为隧道超欠挖、断面变形值和平整度等数据彩色数值分析报告的底图使用。
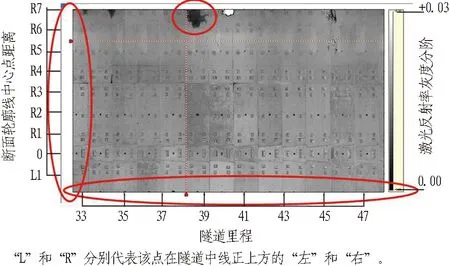
图4 1∶300可量测激光雷达隧道正射影像灰度图
Fig. 4 Grey-scale map of orthophoto of tunnel by LIDAR in 1∶300 scale

(a) 隧道内壁激光雷达正射影像展开示意图 (b) 纵坐标刻度在设计断面轮廓线上的位置对应关系
图5 隧道内壁激光雷达正射影像展开示意图和其纵坐标刻度在设计断面轮廓线上的位置对应关系
Fig. 5 Sketch of unfolded orthophoto of tunnel inner wall by LIDAR and their relevant position on transversal coordinate
5 实例验证
在昆明地铁3号线马眠区间左线用激光扫描竣工检测案例进行验证,使用FARO Focus 3D X330扫描仪在[8 192,8 605]里程的一段区间上扫描了共26站,使用Tunnelscan软件提取1.2 m等间隔断面,并生成隧道内壁激光雷达正射影像,对竣工管环的断面变形初始几何形态进行分析。为了同时保证断面测量的精度[15]和激光雷达隧道正射影像的5 mm分辨率[15],站间距控制在12 m左右(环宽1.2 m,圆环直径5.5 m)。
1)外业规划测算每站有效扫描范围的最远处点云的最大点间距。这步对于需要生成隧道正射影像的应用至关重要,直接影响到最后隧道正射影像的最高分辨率。
本例中采用FARO Focus 3D X330扫描仪使用1/4扫描分辨率,10 m处的点间距为6 mm;隧道直径D,扫描仪高HS,站间距DS。每站点云距离测站最远处DP的最大点间距GP为:

(5)
式(5)数值测算如表1所示。
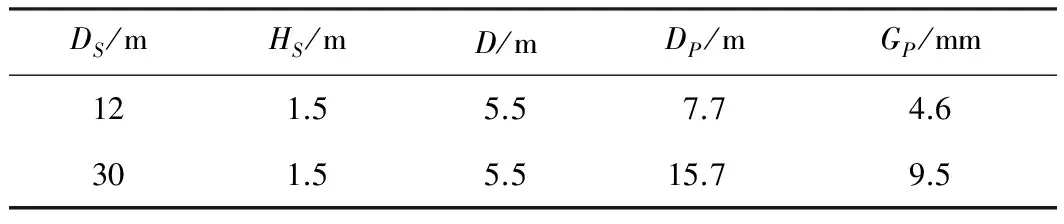
表1 测站有效扫描范围内点云的最大点间距测算表
2)内业第1步,将带有隧道控制坐标系坐标、里程的平曲线、竖曲线和设计断面轮廓线等设计数据输入Tunnelscan软件作为初始参考隧道模型。本例中该段曲线的隧道设计中线数据按照线路设计平曲线数据输入和纵坡采用盾构中心线的DTA数据输入,如图6所示。

(a) 隧道中心线的平曲线

(b) 隧道中心线的竖曲线
Fig. 6 Design data input of horizontal tunnel axis and longitudinal slope (m)
3)第2步,对设计中线进行结构中线偏移计算。线路中线、隧道中线和轨道中线之间有一个固定的相互换算关系。有了这个自动偏移量的计算功能,只需要输入其中一条的线型,就可以自动进行以其他几条线为基准的计算(见图7),没有这个自动内插偏移量计算功能,也无法实现点云数据到用户成果的自动化批处理计算。
本例中,圆曲线段的中线设计偏移量为131 mm,为了实现竣工实测断面与隧道中心线的套合比对实际超欠挖,必须对设计断面在曲线段进行偏移操作。具体做法是直线段偏移量为零,从直缓点8 192.824里程开始起偏,缓圆点8 252.824里程处达到最大水平偏移量131 mm,从圆缓点8 545.025开始平移量均匀减小,直到缓直点偏移量变为零。缓和曲线段的中线偏移量按照距离进行均匀内插。

图7 隧道曲线段的隧道结构中线偏移量设置(单位: m)Fig. 7 Input horizontal offset of tunnel axis in tunnel curve section (m)
4)第3步,将多站拼接好并传递有隧道控制坐标系坐标的点云数据,导入到软件中,并识别出各站在线路中的实际里程。软件使用“点云绝对定位法”[13]一步将各站的点云数据不经过拼接就直接转换到了隧道控制坐标系下。点云输入软件后,软件自动根据坐标计算出各测站在设计中线上的里程和测站坐标。
5)第4步,实测和参考断面中心套合。按照1.2 m等间隔自动截取断面,设置Pzi∈[-0.05 m,+0.05 m]环状过滤器并拟合新的优化断面中心点序列。将新的断面中心点序列作为新的参考轴线输入软件,即可实现实测和设计断面中心套合。对中心套合后的断面使用Pzi∈[-0.02 m,+0.02 m]的环状过滤器,一次将竣工隧道上的管线杂点清除。图8(a)和8(b)分别是实测断面中心和设计断面中心套合前后的8 255.4里程断面图对比。从图8(a)中可以看出,第2步处理中使用的轴线偏移功能解决了实测轴线与初始轴线偏差过大的问题。
6)第5步,使用VC++开发的基于最小二乘椭圆拟合的“断面变形检测软件”进行断面点椭圆拟合分析,并输出竣工状态与设计对比的断面椭圆变形断面图、曲线图和水平横径变形值,如图9和图10所示。
7)第6步,将上述第4步已经确认实测与设计断面中心套合的点云数据,按照“设计断面轮廓法”投影到设计轮廓线上生成激光雷达隧道正射影像。将第4步的实测断面与设计断面对比形成的断面差值Pzi分析结果以不同数值区间对应不同颜色的半透明化方式叠加到隧道正射影像灰度底图上后就可以得到整条隧道实测断面与设计断面对比变形量的整体分布情况。经过该成果的总体分析后,再按图索骥去找断面变形量较大里程的断面图可谓是事半功倍,非常适合地铁隧道变形检测大数据量的批量化分析,而且结果查看比直接在三维点云或者三维模型上分析更加直观,没有视角遮挡问题。

(a) 中心套合前 (b) 中心套合后
图8 中心套合前后的断面图
Fig. 8 Cross-sections before and after center fitting
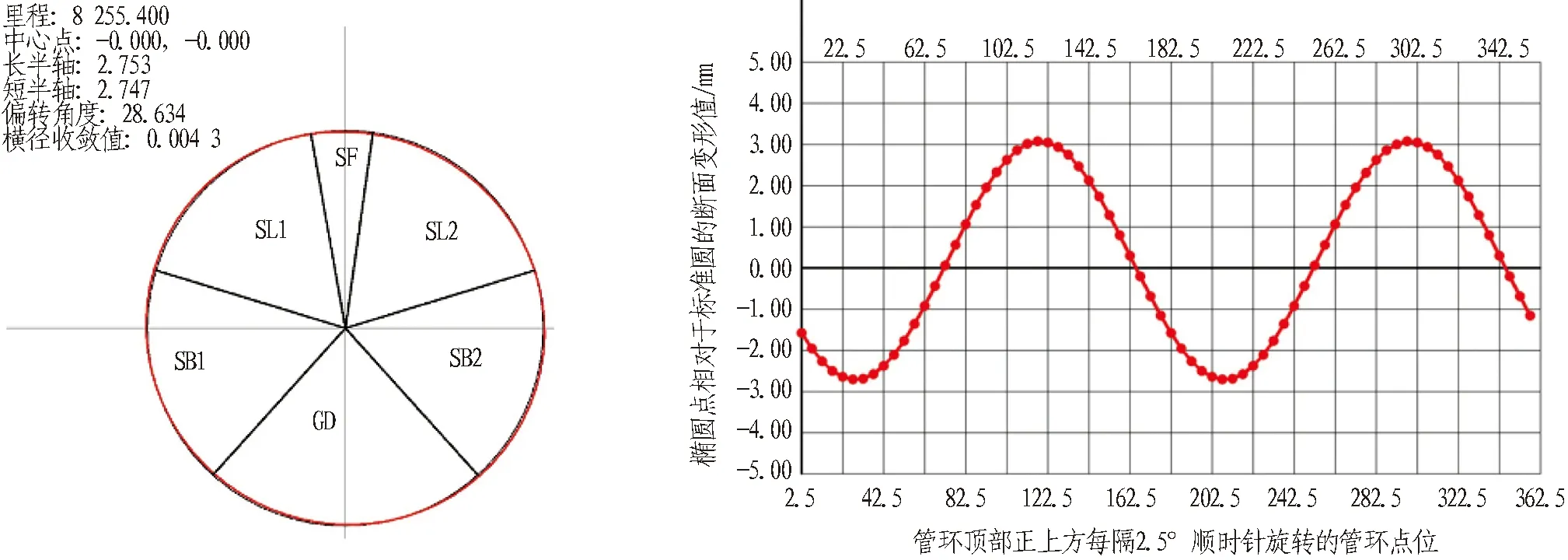
(a) 真圆管环的椭圆拟合变形分析断面图 (b) 管环点位变形曲线图
图9 真圆管环的椭圆拟合变形分析断面图和管环点位变形曲线图
Fig. 9 Analysis cross-section of ellipse fitting of proper circular ring and ring deformation sketch

图10 左线1~150环竣工状态断面椭圆拟合分析获得的水平横径与设计值对比变形量
图11为本例[8 253,8 257.4]区间一幅放大后的激光雷达隧道正射影像断面变形量分析图,红色代表变形的欠挖量超过0.005 m,绿色(本图中已采用半透明化显示处理)代表变形的超欠挖值在[-0.005 m,0.005 m]区间内,蓝色代表超欠挖数值小于-0.005 m。
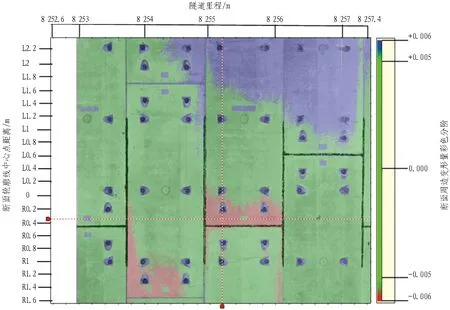
图11 激光雷达隧道正射影像断面变形量分析图
6 结论与讨论
昆明地铁3号线扫描实例中,截取的点云断面变形量的重复测量精度优于规范要求的2 mm,可以满足断面变形测量的精度要求。根据扫描点云提取断面拟合中心与全站仪测量数据做比对,断面中心点的平面坐标较差优于10 mm,可以满足竣工轴线测量的精度要求。
隧道施工、竣工和运营阶段采用真圆隧道激光扫描检测方法,不仅提供了一种全新的基于隧道全断面扫描激光雷达正射影像的断面变形量分析报告,也为地铁真圆型隧道变形检测提供了一种全新的检测手段。
后续研究还需要对点云绝对定位法的点云定位精度进一步评估,探讨该法所获取的点云隧道控制坐标系坐标精度以及在其他隧道测量应用上的适用性。
[1] 北京市规划委员会. 城市轨道交通工程测量规范: GB 50308—2008[S]. 北京: 中国建筑工业出版社, 2008: 84. Beijing Municipal Planning Commission. Specification for measurement of urban rail transit engineering: GB 50308—2008[S]. Beijing: China Architecture & Building Press, 2008: 84.
[2] 戴子枢, 顾沉颖, 段创峰, 等. 基于激光测距的隧道断面收敛监测设备与断面重构方法[J].建筑施工, 2016, 38(6): 793-795. DAI Zishu, GU Chenying, DUAN Chuangfeng, et al. Tunnel section convergence monitoring equipment and section reconstruction method based on laser ranging[J].Building Construction, 2016, 38(6): 793-795.
[3] 谭小东. 基于全站仪隧道收敛自动化测量方法的对比与思考[J]. 现代测绘, 2015(2): 35-37. TAN Xiaodong.Comparative study for measurement of tunnel convergence based on total station[J]. Modern Surveying and Mapping, 2015(2): 35-37.
[4] 张蕴明, 马全民, 李丞鹏, 等. 三维激光扫描技术在地铁隧道收敛监测中的应用[J]. 测绘通报, 2012(增刊1): 438-440. ZHANG Yunming, MA Quanmin, LI Chengpeng,et al. Application of 3D laser scanning technology in metro tunnel convergence monitoring[J]. Bulletin of Surveying and Mapping, 2012(S1): 438-440.
[5] 刘燕萍, 程效军, 贾东峰. 基于激光扫描的隧道收敛分析[J].工程勘察, 2013(3): 74-77. LIU Yanping, CHENG Xiaojun, JIA Dongfeng. Tunnel convergence analysis based on 3D laser scanning[J]. Geotechnical Investigation & Surveying, 2013(3): 74-77.
[6] 王令文, 程效军, 万程辉. 基于三维激光扫描技术的隧道检测技术研究[J].工程勘察, 2013(7): 53-57. WANG Lingwen, CHENG Xiaojun, WAN Chenghui.Study of the 3D laser scanning technology for tunnel inspection[J]. Geotechnical Investigation & Surveying, 2013(7): 53-57.
[7] 谢雄耀, 卢晓智. 基于地面三维激光扫描技术的隧道全断面变形测量方法[J].岩石力学与工程学报, 2013(11): 2214-2224. XIE Xiongyao, LU Xiaozhi. Development of a modeling method for monitoring tunnel deformation based on terrestrial 3D laser scanning[J].Chinese Journal of Rock Mechanics and Engineering, 2013(11): 2214-2224.
[8] 史玉峰, 张俊, 张迎亚. 基于地面三维激光扫描技术的隧道安全监测[J].东南大学学报(自然科学版), 2013(增刊2): 246-249. SHI Yufeng, ZHANG Jun, ZHANG Yingya. Tunnel safety monitoring based on terrestrial laser scanning technology[J].Journal of Southeast University(Natural Sciense Edition), 2013(S2): 246-249.
[9] 托雷, 康志忠, 谢远成, 等. 利用三维点云数据的地铁隧道断面连续截取方法研究[J]. 武汉大学学报(信息科学版),2013(2): 171-175. TUO Lei, KANG Zhizhong, XIE Yuancheng, et al. Continuously vertical section abstraction for deformation monitoring of subway tunnel based on terrestrial point clouds[J]. Geomatics and Information Science of Wuhan University, 2013(2): 171-175.
[10] 朱宁宁. 三维激光扫描在地铁隧道形变监测中的应用[J].测绘工程, 2015(5): 63-68. ZHU Ningning.Application of 3D laser scanning to the subway tunnel deformation monitoring[J].Engineering of Surveying and Mapping, 2015(5): 63-68.
[11] 徐光华. 基于二次曲线拟合的隧道激光点云滤波方法及其应用[J].测绘通报, 2015(5): 42-45. XU Guanghua.Laser point cloud filtering and application in tunnel deformation monitoring based on quadratic curves fitting[J].Bulletin of Surveying and Mapping, 2015(5): 42-45.
[12] 尤相骏, 倪涵. 一种三维激光扫描仪定位装置和激光点云绝对定位方法: 2014101181574[P]. 2014-07-09. YOU Xiangjun, NI Han. A 3D laser scanner positioning device and absolute point cloud positioning method: 2014101181574[P]. 2014-07-09.
[13] 李家平. 基于点云数据的单圆盾构隧道水平弦长检测[J].浙江水利水电学院学报, 2015, 27(4): 53-59. LI Jiaping. Horizontal cord length testing of single circle shield tunnel based on point cloud[J].Journal of Zhejiang University of Water Resource & Electrical Power, 2015, 27(4): 53-59.
[14] 闫蓓, 王斌, 李媛. 基于最小二乘法的椭圆拟合改进算法[J]. 北京航空航天大学学报, 2008, 34(3): 295-298. YAN Bei, WANG Bin, LI Yuan. Optimal ellipse fitting method based on least-square principle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2008, 34(3): 295-298.
[15] 刘绍堂, 潘国荣. 基于激光扫描的隧道变形监测的误差来源及变形分析[J].铁道工程学报, 2013(5): 69-74. LIU Shaotang,PAN Guorong. Sources of errors and deformation analysis of laser scanning based tunnel deformation monitoring[J]. Journal of Railway Engineering Society, 2013(5): 69-74.
Study of a New Proper Circular Tunnel Cross-section Deformation Detection Method Based on 3D Laser Scanning Technology
YOU Xiangjun1, CHENG Jun2
(1.ShanghaiiSpatialCo.,Ltd.,Shanghai200433,China; 2.KunmingRailTransitGroupCo.,Ltd.,Kunming650011,Yunnan,China)
A new, fast, accurate and full-face deformation detection method based on high-density 3D laser scanning technology, tunnel scanning and measuring system Tunnelscan, is introduced. The absolute positioning method (APM) of point cloud is used to register multiple scans and transfer the tunnel control coordinate system to them. The least square method based on minimum distance from cross-section points is used to calculate the center point of cross-section. A ring-shape point cloud filter based on the distance difference from the measured cross-section and the referenced cross-section is applied to remove the noisy points that are actually not on the tunnel wall. The multiple loops of this ring-shape filtering and center point calculation will be executed to get the refined center points and cross-section points of proper circular tunnel constructed by TBM method. It can also offer a new type of user report based on orthophoto of tunnel by laser intensity direction and ranging (LIDAR) of overall tunnel wall, which can provide a quick and big picture of tunnel diseases, such as cross-section deformation, structure clearance alarm, cracks or leakages, etc, using referenced cross-section contour projection method. A real 3D scanning as-built survey test in Majie Station-Mianshan Station section on Kunming Metro Line No.3 is carried out. With the above-mentioned colorful overall tunnel map on the cross-section deformation analysis, much effort can be saved to find out those cross-section charts with large deformation. Apart from that, the analysis with orthophoto of tunnel is much more visual than that directly with 3D tunnel point cloud or that with 3D model for the shelter of visual angle.
tunnel; deformation detection of cross-section; laser scanning; tunnel axis measuring; absolute positioning method of point cloud; orthophoto of tunnel by laser intensity direction and ranging (LIDAR); tunnel disease
2016-08-09;
2017-01-04
云南省交通运输厅科技项目(云交科2016(A)09)
尤相骏(1978—),男,江苏南京人,2002年毕业于同济大学,大地测量学与测量工程专业,硕士,工程师,主要从事LIDAR、LBS、RS、BIM等新技术在土木工程领域的应用和研究。E-mail: karlyou@qq.com。
10.3973/j.issn.1672-741X.2017.07.003
U 456.3
B
1672-741X(2017)07-0794-09
