基于信号分布图构建的煤矿井下定位系统的研究与设计
2017-08-01杨柳铭武方达韩会杰
杨柳铭 蒋 磊 武方达 韩会杰
(1. 中国矿业大学(北京)机电与信息工程学院,北京市海淀区,100083;2.中国矿业大学(北京)信息工程研究所,北京市海淀区,100083)
基于信号分布图构建的煤矿井下定位系统的研究与设计
杨柳铭1蒋 磊1武方达1韩会杰2
(1. 中国矿业大学(北京)机电与信息工程学院,北京市海淀区,100083;2.中国矿业大学(北京)信息工程研究所,北京市海淀区,100083)
针对煤矿井下WiFi定位方式存在的定位精度不高的现状,提出了一种基于信号分布图构建的煤矿井下定位系统,分析了该定位系统的总体架构,介绍了该定位系统的硬件系统设计和软件系统设计,经过实际场景测试表明,采用信号分布图实现指纹定位算法可以满足煤矿井下定位精度的要求,能够有效解决现有煤矿井下定位系统精度差、部署复杂以及向新工作面扩展困难等问题。
信号分布图 无线传感器网络 定位系统 指纹定位
1 煤矿井下定位系统现状与存在的问题
无线传感器网络(Wireless Sensor Networks,简称WSNs)是一种分布式传感网络,传感器节点以无线网络方式通信,因此网络部署灵活,适用于环境监控、智能交通等领域。WSNs在煤矿井下的应用也比较广泛,由于煤矿井下存在地质条件复杂、工作环境安全性较差的特征,需要将WSNs部署到煤矿井下负责环境气体采集、结构力学监测、定位以及视频监控等任务,从而协作煤矿安全、稳定地开展生产作业。
WSNs作为煤矿井下定位技术的基础而被广泛应用。大多数学者的研究关注于如何精确计算传感器节点到待定位目标的距离和角度,准确测算待定位目标与节点间的相对位置来实现定位功能。然而,无论是人员定位算法还是设备定位,均认为信号源节点相对于井下地图的位置是绝对精确的,虽然相对定位坐标已经比较准确,但绝对定位坐标依然引入了节点自身定位的静态误差,导致最终定位结果存在静态误差,并随可观测节点数量呈指数级增长。精确的定位需要精确的节点方位(位置和角度)与相关信息做支撑。
常见的节点定位技术分为人工标定法与节点自定位法,而节点自定位法又分为基于测距(range-based)定位与测距无关(range-free)定位。人工标定法有着部署周期长、维护难度大、成本高以及人为误差大导致的定位精确度大等缺点,不适合作为高精度定位算法的假设条件;基于测距定位的自定位法最常见的是RSSI定位方案,有专家提出了一种加权RSSI的节点自定位算法,该算法定位精度比传统质心算法提高了10%,理想条件下平均最小精度达到0.66 m,主要问题是功耗高和部署难度大;测距无关的自定位法应用比较广泛,常用的如Dv-Hop算法以及质心算法均存在精度不高或应用条件相对苛刻等问题。
2 基于信号分布图构建的煤矿井下定位系统方案设计
本文基于煤矿井下定位技术发展的现状,绕开信号源节点自定位研究方向,提出了一种基于信号分布图匹配的定位策略。采用本文设计的一套手持式激光建图设备作为定位硬件,采用SLAM实时构建井下结构地图,在记录信号分布的同时绘制信号分布图,并将地图保存到服务器中。后期实现定位功能时,待定位目标只需测量当前位置信号信息,匹配信号分布图来完成定位,从而获得更精确的定位结果。
也有专家采用一种与本文类似的解决方案,应用Hector SLAM算法来连续绘制了室内长廊环境下RSSI的信号分布图,室内部署了27个射频节点,实测效果良好。在此基础上,本文进一步提高地图绘制的精度与定位精度,使之更适合于在煤矿井下复杂地形环境下使用,同时优化信号分布图构建算法及定位算法,提高运算效率并验证可行性。
2.1 定位系统总体结构
由于考虑到煤矿井下的复杂工作环境,选用一款高精度和高稳定性的激光建图设备来完成建图工作,定位系统总体结构图如图1所示。
由图1可以看出,圆柱形符号代表本文设计的建图设备,工作时由工作人员手持建图设备下井完成建图工作,由于采用的是无线通信方式,因此可以保证对现有煤矿井下工作环境影响最小的同时完成定位任务。短虚线箭头代表数据通信无线链路,与以太网线路配合,负责传输定位数据给井上服务器;长虚线箭头代表定位通信无线链路,用于完成定位时的WiFi信号采集。在实际应用中,只需要携带本文手持式建图设备下井即可,其他如井下无线路由器、井下网络中继器等设备目前已广泛应用于煤矿井下,无需另行配置。

图1 定位系统总体结构图
2.2 结构地图与信号分布图构建
SLAM技术是指同时定位与地图构建技术,在煤矿井下的应用依然仅停留在人工控制或重复性作业工作中,缺乏智能化和通用化,在煤矿安全问题日益突出的背景下,煤矿无人化生产的需求已经被提上日程。而SLAM技术作为机器设备自主导航和环境感知的基础,受到机器人领域和计算机科学领域的广泛重视。SLAM算法采用Google公司提出的2D-SLAM开源算法Cartographer,在ROS(机器人操作系统)环境下搭建。
手持式结构建图设备安装有激光雷达作为距离采集设备,从而实时绘制煤矿井下结构地图。实际使用时,考虑到煤矿井下环境的不规整特点,采用分区域建图的方式,由测试人员携带手持式结构建图设备下井,对煤矿井下环境二维平面内完成稳定的全范围激光扫描,SLAM算法将会在激光扫描的同时完成二维平面建图,建图数据将存储到手持式结构建图设备中,当完成区域内的结构地图建图后,可以导出地图数据,用于后期定位使用。
WiFi网络是煤矿无线传感器网络广泛使用的无线通信方式,因此试验选用2.4 G WiFi信号作为测试通信节点,接收周围WiFi信号节点发射的信号并获取RSSI与节点标签(本文选择WiFi信号节点的MAC地址作为节点标签)形成指纹数据。由于RSSI在空间中分布情况受环境影响较大,容易掺杂噪声,巷道结构中存在多径效应,故而增加了原始数据采样的难度。本文采用数字信号滤波的思想对采样信号做预处理,从而减小RSSI的噪声和扰动问题。
3 基于信号分布图构建的煤矿井下定位系统设计
3.1 定位系统流程总体结构
整个定位系统工作流程由地图构建阶段和定位匹配阶段两个阶段组成,两个阶段分时完成。定位系统工作流程图如图2所示。

图2 定位系统工作流程图
地图构建阶段的工作属于定位维护工作,需要由测试人员携带专用设备完成采集,该部分工作完成的结果是获取到井下区域内的结构地图和信号分布图,两种地图数据将作为定位匹配阶段的参考数据库完成定位任务。地图构建阶段又分为两个子任务,分别是结构地图构建与信号分布图构建,结构地图需要由建图设备采集距离数据,然后采用SLAM算法完成区域结构地图,信号分布图需要由WiFi无线网卡配合便携式工控机采集WiFi信号的RSSI数据,信号分布图用于描绘出信号分布情况,并与结构地图的坐标通过一一映射形成数据表,完成信号分布图并存储。完成地图构建阶段任务后,结构地图与信号分布图可以导出并存入数据库。
定位匹配阶段的工作属于定位实现工作,该部分算法将集成到定位硬件设备中,并由人员携带入井或安装于井下待定位设备,实现人员或设备的定位。输入依然是WiFi信号的RSSI值,经采集之后,对采集信号与信号分布图做匹配计算,得出最优定位坐标,该定位坐标即为人员或设备的估计坐标。
本定位系统结构的主要优势在于,有效利用了传统仅采集RSSI信号来建图时坐标人工标定的不可靠性,用激光设备取代人工标定结构坐标来完成结构地图构建,有效地提高了参考坐标的准确度。
3.2 定位系统硬件设计
手持式建图设备安装有Rplidar A1激光雷达(LIDAR),支持360°全向扫描,SLAM算法实现依赖于LIDAR来完成。同时安装有Intel 5300无线网卡,用于接收WiFi信号的RSSI值。整个软件系统运行在x86便携式工控机(酷睿i5双核CPU,128G固态硬盘)上,工控机运行Linux系统(Ubuntu 14.04),安装有ROS工具集,服务器端安装有同样版本的ROS工具集,用于远程监控整个系统的运行情况并实时调取地图构建过程与信号分布图构建过程。服务端通信方式采用局域网内SSH通信。定位系统硬件框图如图3所示。

图3 定位系统硬件框图
3.3 定位系统软件设计
通过远程SSH通信方式与便携式工控机通信,更新程序并传递系统建立的结构地图与信号分布图。软件设计采用多进程方式,主进程完成任务调度工作,同时主进程在工作周期内启动结构地图构建进程与信号分布图构建进程,两个子进程并行运行并交换数据,有效提高系统运行效率并最大程度地避免算法运行异常。 定位系统软件流程图如图4所示。

图4 定位系统软件流程图
4 试验结果
4.1 试验环境
试验环境选择模拟井下环境的室内空旷环境,室内面积约为95 m2,环境墙壁粗糙,夜间试验。室内布置有5个WiFi信号节点,工作在2.4 GHz频段。实际试验环境结构图如图5所示,图中黑点为WiFi信号节点位置。

图5 实际试验环境结构图
4.2 试验结果
(1)结构地图与信号分布图构建。在试验环境下进行多次试验,调整激光扫描频率,来获取匹配度最高的结构地图,通过此最优参数调整系统参数,获取信号分布图。图6(a)表示通过SLAM构建的结构地图,图6(b)表示构建的其中一个节点的信号分布图。
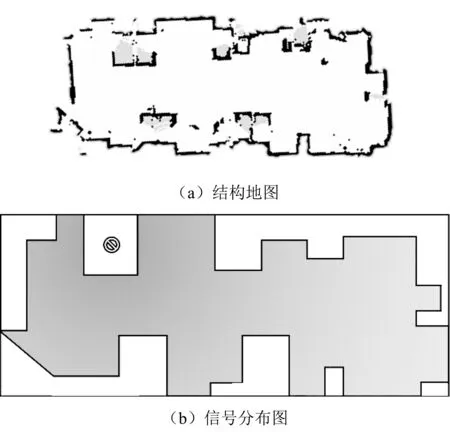
图6 构建的结构地图与信号分布图
在构建过程中,为了防止非试验节点的WiFi信号对试验产生影响,在WiFi信号接收器中配置接收白名单,只允许指定的试验WiFi节点通过信号接收器。
(2)定位过程。本试验实际测试了该算法对于定位过程的定位情况。经分析,定位轨迹与真实轨迹的相关度最优达到0.977,最大定位误差为11 cm。SLAM算法与质心算法的误差比较见表1。

表1 SLAM算法与质心算法的误差比较 m/300cm
5 结论
本文实际在模拟巷道试验环境下验证了基于信号分布图构建的定位方案效果。由试验结果可知,该方案具有实现煤矿井下定位的可行性,最优定位误差相较质心算法有比较明显的改善,最优误差达到0.145 m/300cm。在实际测试中,算法复杂度依然是一个值得考虑的问题,为了提高定位的实时性,必须提高定位过程的运算速率。同时受信号分布不均匀的影响,Radio map的精确构建将决定整个系统的定位精度。
[1] Li M, Liu Y. Underground coal mine monitoring with wireless sensor networks[J]. ACM Transactions on Sensor Networks (TOSN), 2009(2)
[2] Uguz, S. The Performance Parameters Of Wireless Sensor Networks In Underground Mines[J]. International Journal of Scientific & Technology Research, 2016(7)
[3] 谭玉新,杨维. 一种基于UKF的井下机器人超声网络定位方法[J]. 煤炭学报,2016(9)
[4] Chen H. Accurate and efficient node localization in wireless sensor networks[D]. University of Tokyo, 2011
[5] 汪炀. 无线传感器网络定位技术研究[D].中国科学技术大学,2007
[6] Bulusu N, Heidemann J, Estrin D. GPS-less low-cost outdoor localization for very small devices[J]. IEEE personal communications, 2000(5)
[7] Thrun S, Leonard J J. Simultaneous localization and mapping[M]. Springer handbook of robotics. Springer Berlin Heidelberg, 2008
[8] Hess W, Kohler D, Rapp H, et al. Real-time loop closure in 2D LIDAR SLAM[C]. Robotics and Automation (ICRA), 2016 IEEE International Conference on. IEEE, 2016
[9] Weiss M A, Chen Y. Data structures and algorithm analysis in C[M]. Reading: Addison-Wesley, 1997
[10] Subbu P, Sasidhar K. Indoor localization using magnetic fields[M]. University of North Texas, 2011[11] 谭章禄,刘浩,常金明等.基于RFID技术的井下人员智能定位系统优化设计[J].中国煤炭,2013(12)
[12] 魏景新,靳文涛.基于ZigBee技术的煤矿井下自组网定位系统设计[J].中国煤炭,2017(3)
(责任编辑 路 强)
Research and design of underground coal mine positioning technology based on signal distribution diagram construction
Yang Liuming1, Jiang Lei1, Wu Fangda1, Han Huijie2
(1. School of Mechanical Electronic & Information Engineering, China University of Mining and Technology, Beijing, Haidian, Beijing 100083, China;2. Research Institute of Information Engineering, China University of Mining and Technology, Beijing, Haidian, Beijing 100083, China)
In the view of the low accuracy of current WiFi positioning method in coal mine,underground coal mine positioning system based on signal distribution diagram construction was proposed,overall architecture of the positioning system was analyzed and the hardware and software system designs were introduced. The practical scenario test showed that the signal distribution diagram realized fingerprint positioning algorithm, which could meet the requirement of underground coal mine positioning accuracy and effectively solve the problems of low accuracy, complex deployment and difficult extension of current positioning system.
signal distribution diagram, wireless sensor network, positioning system, fingerprint positioning
杨柳铭,蒋磊,武方达等. 基于信号分布图构建的煤矿井下定位系统的研究与设计[J].中国煤炭,2017,43(7):98-102. Yang Liuming, Jiang Lei, Wu Fangda et al. Research and design of underground coal mine positioning technology based on signal distribution diagram construction[J].China Coal,2017,43(7):98-102.
TD655
A
杨柳铭(1994-),男,内蒙古鄂尔多斯人,在读硕士研究生,主要研究方向为煤矿通信与定位感知。
