气味鉴别行为建模与评估系统的建立
2017-08-01吴德华宋珍华强京宁刘定震龙成生陈然然
吴德华 宋珍华 强京宁 张 楠 刘定震 龙成生 陈然然
训练·行为
气味鉴别行为建模与评估系统的建立
吴德华 宋珍华 强京宁 张 楠 刘定震 龙成生 陈然然
将六轴传感器、陀螺仪等新技术应用到警犬气味鉴别行为测量评价中,研发了警犬气味鉴别行为采集专用的体态变化传感采集器,专用于采集提取存贮犬体态发生变化时的行为数据;利用波形拟合算法、神经网络算法等机器算法,对采集器所获取的行为数据进行数据分析与数学模型建立、驯化、优化应用。结果表明:研制的警犬行为数据采集器能够有效采集存贮犬的鉴别行为数据,建立的警犬气味鉴别行为识别评价系统能够应用于辅助评价警犬日常气味鉴别行为;用于驯化的行为数据量越大,其建立模型的评价结果越能与鉴别犬的实际鉴别作业能力相吻合。
警犬气味鉴别是指鉴定主体科学运用警犬技术,在具备实验条件的场所,使具备鉴别能力的警犬,充分利用其对气味灵敏的分析与综合能力,以与案件有关的人体气味为嗅源,通过专门方法对提取的被鉴物气味进行鉴别和判断,做出是否同一的鉴定结论,并提供气味鉴定意见的活动。为了保证警犬气味鉴别行为的稳定性、更好地识别气味鉴别行为的差异性,科学客观地评价警犬气味鉴别行为的结果,我们将传感器识别与计算机模拟技术应用到警犬气味鉴别行为识别评估工作中,建立了警犬鉴别行为识别评估系统。现将有关情况报告如下:
一、建模方法与程序设计
警犬在日常生活及工作的过程中,因体态不断地改变从而构成了警犬的各种行为。警犬气味鉴别活动也是如此。在警犬进行鉴别工作时,最常发生的行为表现是坐、抓扒、低头嗅闻、走动等。这些行为中均发生犬体态的变化。为了测量和评价鉴别犬体态发生的变化,我们采用了目前较为先进的硬件设备(如六轴传感器、陀螺仪等)来采集犬的行为数据,并结合大数据统计和数学建模方法(如波形拟合算法、神经网络算法)来进行评估研究。本试验采用的建模方法和程序设计主要包括以下7个方面:
(一)数据采集终端的研发
利用六轴传感、陀螺仪、加速度计技术,研发了犬行为采集专用的体态传感器,采集提取存贮犬体态发生变化时的行为数据。传感器实物图见图1。
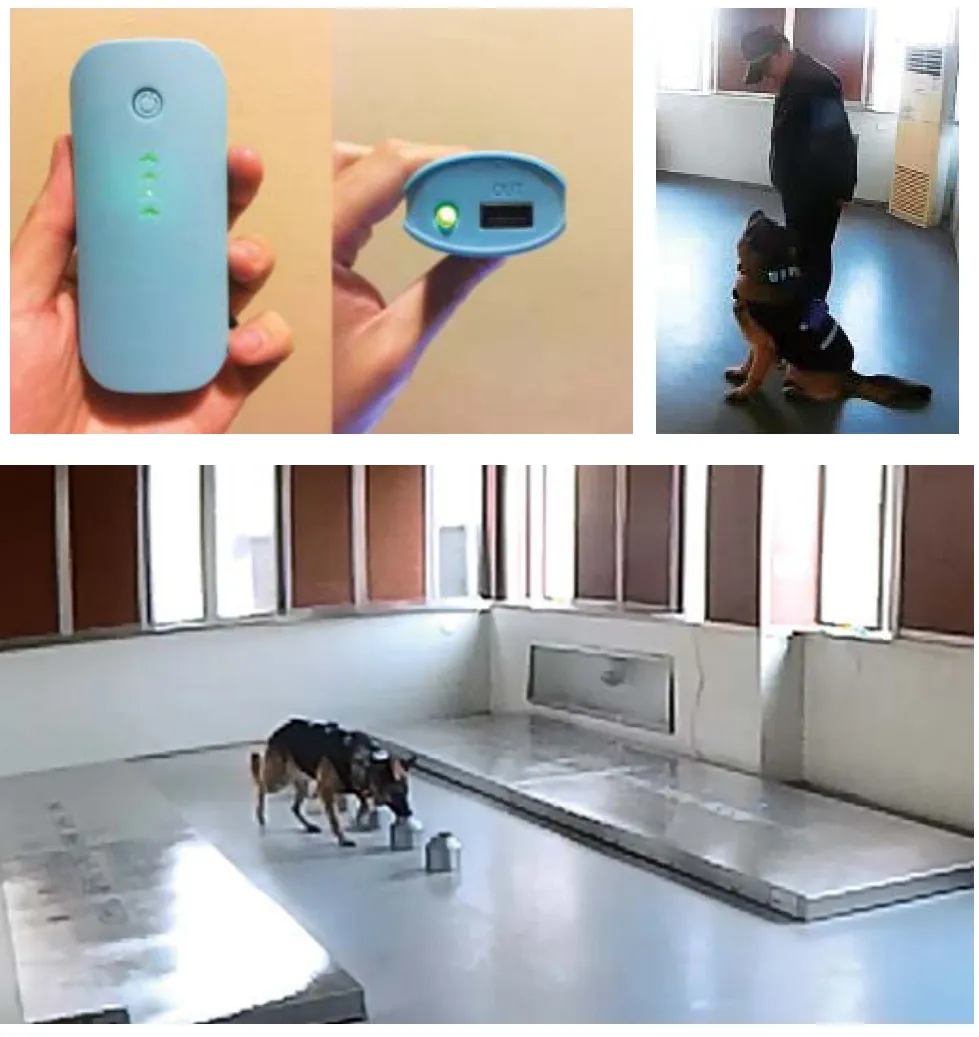
图1 传感器实物图
(二)数据的提取和转换
提取采集器中采集的原始数据,并将数据中的16进制转换成10进制,存储到fulldata.m文件中;同时读取传感器原始六轴数据,将数据存储到data.m文件中。相关程序代码如下:
fulldata=data_trsport('080309-背部.dat');
data=fulldata(:,8:13);%读取数据中的六轴原始数据
(三)数据的过滤与降噪
对原始六轴数据进行滤波,减少噪声的干扰。相关程序如下:rgx=rgx+(gx_vector(5)-t0_rgx)/filter_ len;
rgy=rgy+(gy_vector(5)-t0_rgy)/filter_len;%对陀螺仪数据进行均值滤波
rgz=rgz+(gz_vector(5)-t0_rgz)/filter_len;
rax=median_filter(ax_vector,filter_len);
ray=median_filter(ay_vector,filter_len);%对加速度计数据进行中值滤波
raz=median_filter(az_vector,filter_len);
(四)数据融合
将采集器中的陀螺仪数据与加速度计数据进行融合,获得静止状态下的重力加速度的三轴的分量,根据重力加速度的三轴分量计算出对应的姿态数据,包括俯仰角、横滚角和竖直方向上的加速度分量。相关程序代码如下:
pitch_angle_value=-pitch_angle_deal(rgx,rgy,rgz,rax,ray,raz);%计算俯仰角roll_angle_ value=-roll_angle_deal(rgx,rgy,rgz,rax,raz);%计算横滚角z_axis_gravity_az=z_axis_gravity_ deal(rax,ray,raz,-pitch_angle_value,-roll_ angle_value);%计算z轴重力加速度分量
(五)数据分析与矩阵建立
对所获得的数据进行整合分析,获取所需要动作的识别特征矩阵。首先选取合适的识别窗口大小,比如针对嗅气味这个动作,发生的时间非常短,我们选取0.25s为识别窗口;其次根据时间误差找到这个动作对应的姿态数据,计算并获取特征矩阵。相关程序代码如下:
feature_matrix,active_happen_time,accord_ windows]=capture_new_active(angle_data,windows_ size,newdz,errt);%计算并获取特征矩阵
(六)关键行为特征数据的捕获。
在数据矩阵中,对日常活动及鉴别过程中发生的特征关键行为动作数据进行捕获,用于分析。相关程序代码如下:
if len==windows_size
capture_value=capture_deal(angle_feature_ vector,figure_matrix);
end %识别捕获动作
其中,鉴别犬杰希气味鉴别过程中各个动作的波形图见图2。
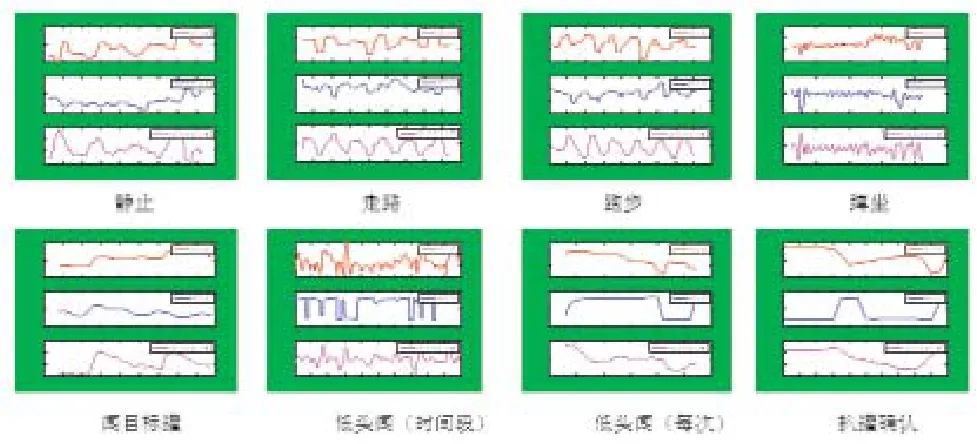
图2 杰希气味鉴别过程中各个动作的波形图
杰希气味鉴别过程中各个动作的特征矩阵见图3。
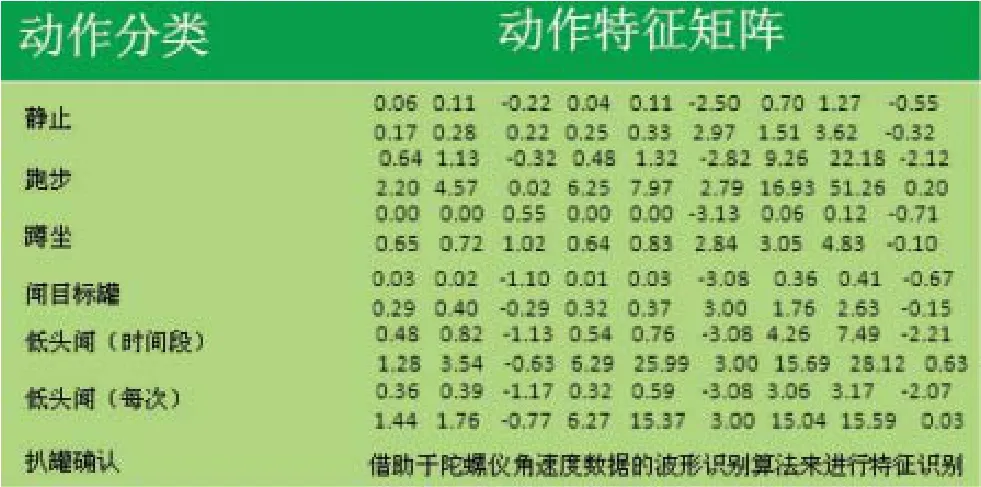
图3 杰希气味鉴别过程中各个动作的特征矩阵
(七)数据建模分析
对捕获的数据进行大样本数据整合,建立识别模型。在此过程中进行大样本数据检验与算法迭代优化。最终获得适合于相应警犬的气味鉴别行为识别模型。

图4 数学建模过程示意图
二、模型驯化与系统建立
本研究选用6头气味鉴别犬进行试验,利用穿戴式行为数据采集设备和视频采集设备同时进行警犬行为数据的采集。每头气味鉴别犬的单个鉴别行为集样本至少为30个,针对每头犬建立一个相应的行为模型。模型初建后,再不断用相应犬的新数据对模型进行检验优化,以使每个模型更加贴合每头警犬的行为。
在此基础上整合行为采集、处理、评价的技术过程,设计建立警犬气味识别行为分析评估系统,用以辅助评价警犬日常气味鉴别行为。

三、评估分析
为了检验评估系统的性能,我们选取了6头犬连续8次的行为数据,利用该系统进行分析评估。结果见表1、表2、表3。

表1 警犬鉴别行为评估最高分
将表1中每头犬评估得分最高的鉴别行为与其现场视频资料相比对,可发现该次鉴别行为是8次鉴别行为中最好的,该分值比较符合通过肉眼观察所作的判断;另外,每头犬的最高得分情况为马丁>杰希>杰克>小野>小相>泰戈,该分值排序比较符合通过肉眼观察对每头犬的鉴别状态及能力所作的判断。因此,可以推断该评估系统所得的分值能较好的直观反映每头犬的鉴别状态。

表2 警犬鉴别行为评估最低分
将表2中每头犬评估得分最低的鉴别行为与其现场视频资料相比对,可发现该次鉴别行为是8次鉴别行为中最差的,比较符合通过肉眼观察对每头犬的鉴别状态及能力所作的判断。
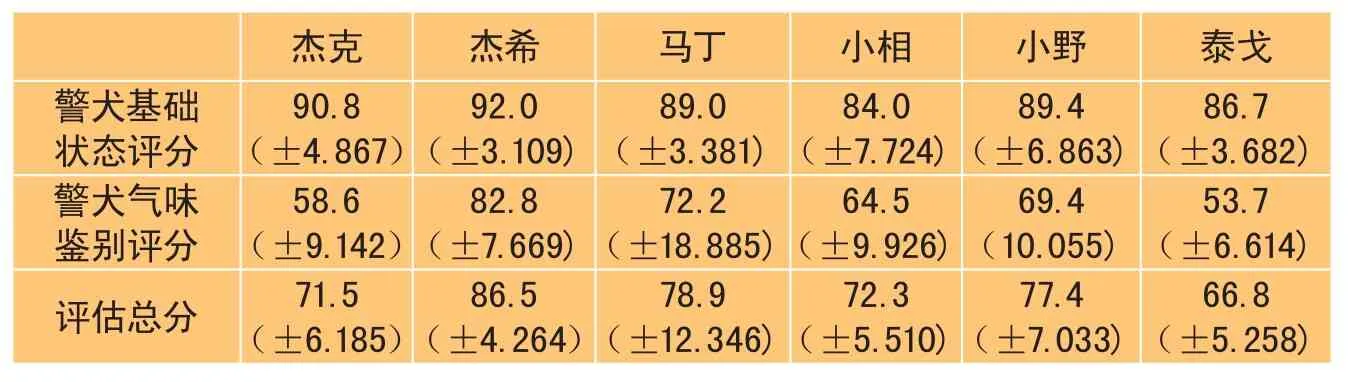
表3 警犬行为评估得分平均值
表3中所示的每头犬评估得分平均值为杰希>马丁>小野>小相>杰克>泰戈,该分值排序比较符合通过肉眼观察对每头犬的鉴别状态及能力所作的判断;另外每头犬多次评估得分的标准方差为杰希<泰戈<小相<杰克<小野<马丁,该分值排序说明了每头犬鉴别行为的稳定性差异,比较符合每头犬的真实情况。此外,每头犬每次正确确认目标罐的行为评估总分都在60分以上,可初步推断警犬行为评估总分在60分以上时警犬正确确认了目标罐;每头犬的基础状态评分都在80分以上,说明每头犬的状态良好,此项得分可帮助训导员及时了解犬的工作状态,并及时调整犬的工作状态。另外,每头犬的气味鉴别评分差异较大,可推断每头犬的气味鉴别能力和鉴别行为差异较大,此项得分可帮助训导员不断提高犬的鉴别能力。表中每项得分的标准方差大小不一,从中可推断出每头犬气味鉴别行为的稳定性不同,此值可以辅助训导员了解犬某段时间内的工作状态是否稳定,以便及时进行调整,使警犬的气味鉴别行为更加稳定。
在连续8次的气味鉴别训练中,泰戈识别目标罐的错误率最高,对其连续6天错误识别目标罐的行为数据进行评估发现,警犬基础状态评分为88~94分(均值为91.2分);气味鉴别评分为3.1~27.8分(均值为17.01分);任务评估总分为38.3~53.9分(均值为46.68分);由以上得分可以推断出,该系统能较好地评估出警犬的气味鉴别行为。

四、讨论
已建立的警犬气味识别行为分析评估系统,主要用于辅助评价警犬气味鉴别行为的结果,一方面可帮助训导员了解警犬在日常训练中的行为,以提高训练效率;另一方面可为专家评价警犬气味鉴别的结果提供参考。
(一)针对日常训练的评估结果表明,警犬气味识别行为分析评估系统可初步用于辅助评价警犬的气味鉴别。
(二)评估系统中已形成的6头犬的行为识别模型精确与否,还需大量的行为数据驯化相应的数据模型。在达到大样本模型数据后,可进一步提高模型的符合性。同时在日常工作中还需要不断用新的行为数据优化评估系统,使得每个模型更加贴合每头犬的鉴别行为。
(三)该系统建立的模型是针对每头鉴别犬量身定制,不具有普遍性。某头犬的模型不能通用于所有犬。这一特点也符合鉴别工作中的具体情况。
(作者单位:公安部南京警犬研究所,210012)
(编辑:颜 勤)