主从式结构的车辆自适应前照灯控制系统设计*
2017-07-31段海艳范晓娟胡坤福宾洋罗文广朱书善
段海艳,范晓娟,胡坤福,宾洋,罗文广,朱书善
(1.广西科技大学 电气与信息工程学院,柳州545006;2.重庆理工大学机械检测技术与装备教育部工程研究中心;3.北京理工大学)
主从式结构的车辆自适应前照灯控制系统设计*
段海艳1,范晓娟1,胡坤福1,宾洋2,罗文广1,朱书善3
(1.广西科技大学 电气与信息工程学院,柳州545006;2.重庆理工大学机械检测技术与装备教育部工程研究中心;3.北京理工大学)
车辆自适应前照灯系统(Adaptive Front-lighting System,AFS)是车辆的一种主动安全系统。本文开发的AFS采用主控模块加电机驱动辅助模块组成的主从式结构。AFS主控模块用于采集车身悬架高度、方向盘转角、GPS等传感器信号,用于进行水平和垂直两个方向的车灯角度计算,并发送控制指令信号给步进电机;电机驱动辅助模块用于接收主控模块发出的控制指令信号,并驱动步进电机运动,实现车灯随动转向。现已开发出整套软件算法和硬件原理样机。实验结果表明,该系统能够实现弯道随动转向和坡道俯仰调节,完成不同速度下光型模式的配置。
自适应前照灯系统;自动控制;信号采集;步进电机驱动
引 言
车辆自适应前照灯系统AFS(Adaptive Front-lighting System)可按照方向盘转动角度、车速、天气情况、道路坡度和曲率的变化做出光型、角度的调整,以满足不同的照明要求,从而有效地改善夜间行车照明效果、提高安全性[1-2]。有统计数据表明:夜间发生交通事故的次数大约是白天的3倍,其中有60%是发生在夜间弯道行驶时照明不良的情况下[3]。据报道,在同等路况的条件下,应用AFS系统时,可见度提升45%。因此,提高汽车大灯对环境的智能适应度,在避免交通事故方面有重要意义。
本文的研究内容主要由以下几个部分组成:AFS主机控制模块用于实现车身传感器信号的采集和处理,以及发送主从通信控制命令;电机驱动辅助模块用于接收LIN总线控制命令,驱动步进电机运动;AFS控制算法实现水平、垂直方向的调光电机控制。最终完成硬件系统搭建,并进行实验验证。
1 系统构成及原理
根据AFS的控制过程和功能需求,系统主要由AFS主控模块(Master模块)和两套步进电机驱动模块(Slaver模块)组成,两者之间通过LIN总线进行通信。系统用到的传感器在车身的分布情况如图1所示。
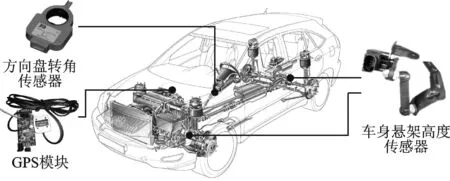
图1 车身传感器分布图
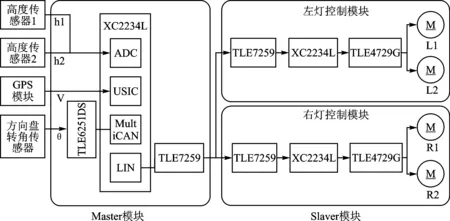
图2 系统结构示意图
前照灯系统结构示意图如图2所示。其中,AFS主控制器用于采集车身悬架高度、方向盘角度、GPS模块的速度信号。方向盘转角θ,用于前照灯的水平方向摆动功能控制,由水平调光电机R1、L1(见图3(a))调节灯光实现弯道模式;汽车车身前、后轴悬架高度信号h1、h2,用于前照灯垂直方向俯仰功能控制,由垂直调光电机(见图3(b))调节灯光实现坡道模式;以车速信号V为基准组合出不同的光型模式,实现乡村、高速、城市和恶劣天气各种路况下的照明模式[18-19]。
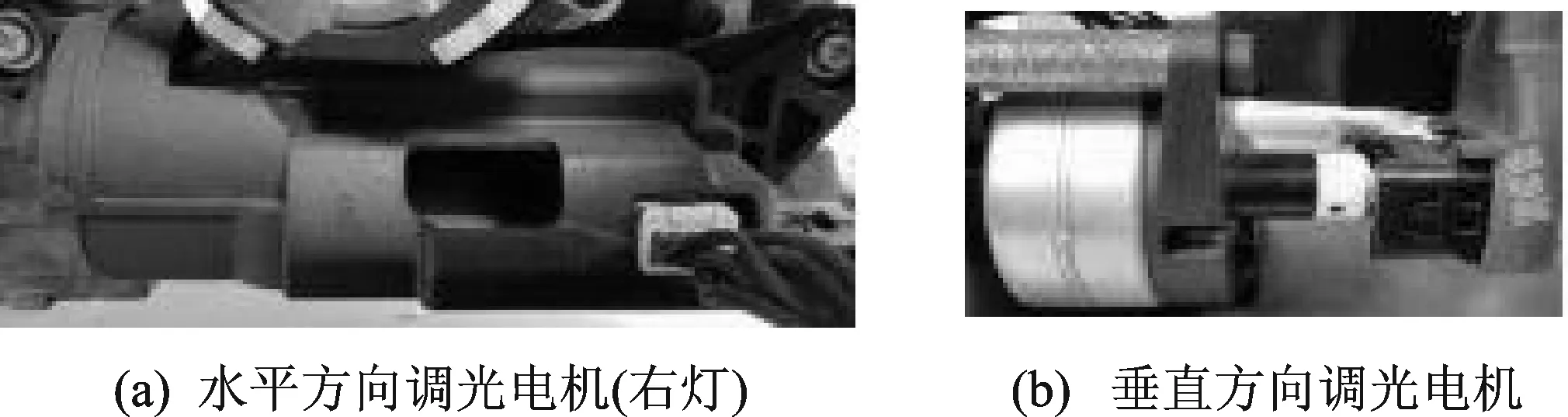
图3 调光电机实物图
系统原理如下:首先,Master模块将采集到的信号进行处理,转换成电机位置信息,通过LIN总线将电机位置信息经LIN收发器发送。然后,两个Slaver模块接收LIN总线信息,并通过电机驱动芯片TLE4729G,控制左、右两侧的步进电机。其中,在Master模块和Slaver模块的LIN总线通信中,采用的是主从式通信,Master作为主机发送命令,Slaver模块作为从机接收命令。最后,系统实现车辆灯光照射范围和角度的调节。
1.1 AFS主机控制模块
Master模块CPU选用Infineon公司的16位微处理器XC2234L-60F,该芯片支持CAN(Control Area Network)总线、LIN总线、串行异步通信、A/D转换等,符合系统功能需求[20]。表1列出Master模块处理的信号类型、所需主芯片支持的功能和对应用到的辅助芯片型号。
1.1.1 方向盘转角信号采集
方向盘转角传感器有6个端口:VBat、CANL、CANH、GND和两个预留端。CANL和CANH以500 Kbps的波特率输出角度、角速度等信息,经双绞线连接CAN总线收发器TLE6251DS,最终进入CAN控制器XC2234L。进入CAN收发器之前,进行硬件滤波,滤波电路接法如下:CANH和CANL之间连接120 Ω电阻,再分别经510 Ω电阻分别接GND和+5 V,实现下拉和上拉的效果。图4的数据结果是将传感器右转再回正,计算处理接收到的十六进制数,经单片机串口发出,在Matlab平台实时采集数据。

表1 AFS主控模块功能总结

图4 方向盘转角信号采集结果
1.1.2 高度信号采集
高度传感器的VCC、GND分别与主芯片端口对应连接,前、后两个传感器的输出端分别与P5.2、P5.3相连,如图5所示使用AD0 CH2和CH3实现多通道A/D转换。Dave设置时,选择仲裁时隙2中的请求源2,实现四级顺序请求源,该请求源可最多产生4路输入通道的转换请求[21],使能0、1、2、3四个通道。添加多通道循环自动扫描初始化程序ADC0_vStartParReqChNum(0x000f)和ADC0_vSetLoadEvent();ADC中断中获取采集2、3通道的数据:ADResult[2]=ADC0_uwGetResultData(RESULT_REG_2)。
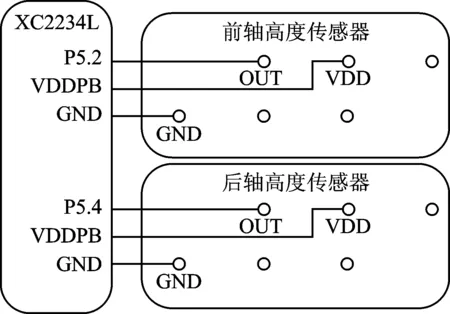
图5 高度传感器接线图
12位A/D转换的范围为0~4 096,后轴采集结果如图6所示。
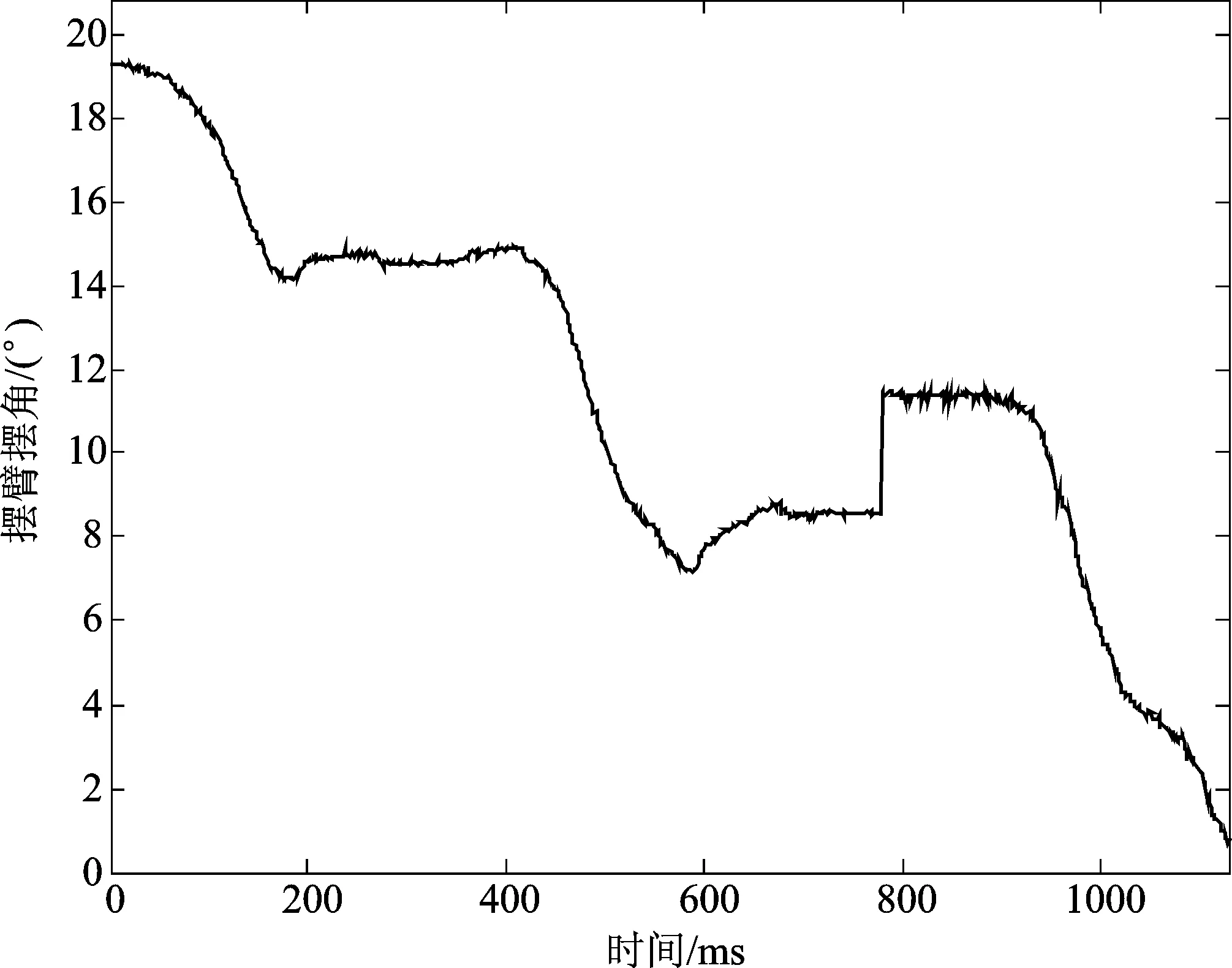
图6 后轴高度信号采集结果
1.1.3 速度信号采集
欧洲经济委员会(Economic Commission for Europe,ECE)颁布的法规R123和R48中,AFS系统以车速信号为基准组合出几种不同的光型[22]。GPS模块通常以串口形式输出数据,内容遵循NMEA-0183协议,故设置USIC1 CH1为异步串行通道,P6.0、P6.1为输入、输出端,使能初始化、采集数据等函数。GPS模块得到速度信号具体流程:在初始化函数U1C1_ASC_vInit()里,接收中断标志位被置位;U1C1_0INT中断函数里包含识别语句头的判断;将字符串形式的速度值转化为浮点型,先判断小数点的位置,再对小数点前、后对应位的值扩大、缩小10n倍。采集、转化数据的结果如图7所示。
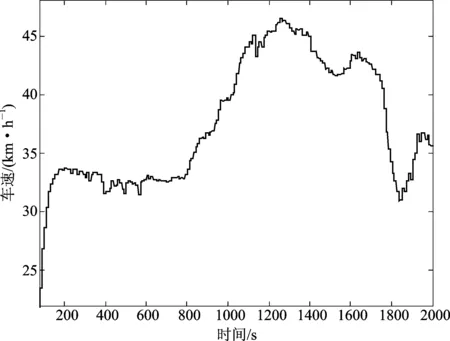
图7 速度信号采集结果
1.2 主从模块通信
在系统AFS主控模块和从机模块中,TLE7259G和MCU的连接说明如下:
① 虽然电路内部在BUS引脚与VS引脚集成了上拉电阻和串联三极管,但对于主节点,则必须在外部增加1 kΩ的上拉电阻,并要串联一个二极管,防止掉电时TLE7259G通过总线上电;
② 需将TLE7259芯片的Vs端和VBat短接,为LIN芯片正常工作供电。系统中1个主节点2个从节点,主节点将控制命令以图8的形式发送给从节点。其中,间隔场由多于13个显性位和1个隐性位组成,发送间隔场时用变波特率法,即先以9.6 kbps发送间隔场0x80,再以19.2 kbps发送其余部分;校验和场对数据场的内容进行校验时,遵循LIN总线翻转8位和方法校验。
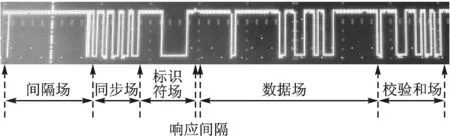
图8 LIN总线数据波形
1.3 电机驱动辅助模块
Slaver模块选用TLE4729G[23]步进电机驱动芯片,通过控制端口输出不同频率的脉冲,实现电机不同运动模式控制。图9为Tasking调试界面(左)和U2any软件界面(右)。其中,显示出主机给从机发送电机位置信息,帧ID为30,帧数据长度为8字节,数据内容为A5 00 A6 00 4C 01 00 00,A5为垂直调光电机位置低8位,A6为左侧水平调光电机位置低8位,4C和01为右侧水平调光电机位置低8位和高8位。为避免总线数据漏包,使电机完成复位
运行,要进行一定的软件延时。
2 AFS控制算法
基于速度信号,系统由路口、乡村、城市、高速和恶劣天气5种模式组成,弯道和俯仰模式由传感器实时采集数据控制,光型由水平、垂直方向的步进电机运动组合而成。
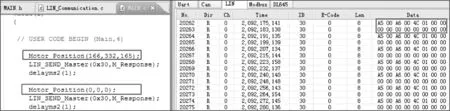
图9 Tasking程序内容和U2any界面中LIN数据发送
2.1 步进电机控制
将步进电机满量程等分成不同的步数,常态位置值固定不变,系统初始化先将电机位置复位归零,再回到常态位置。霍尔传感器检测电机位置信息,误差累积>10步,电机被复位到正确位置,以保证系统的精度。在此基础上,对角度和位置值进行划分,列出了电机位置与车灯角度调整的对应关系,见表2。
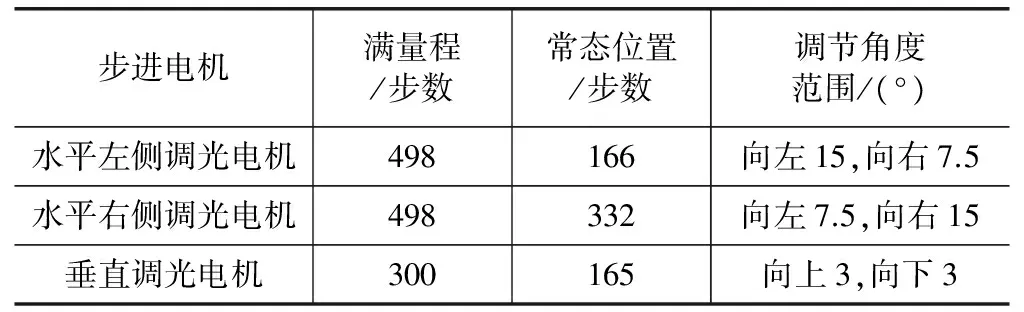
表2 步进电机位置信息和车灯角度调整
2.1.1 水平方向控制
方向盘转角传感器自身存在如下特性:

(1)
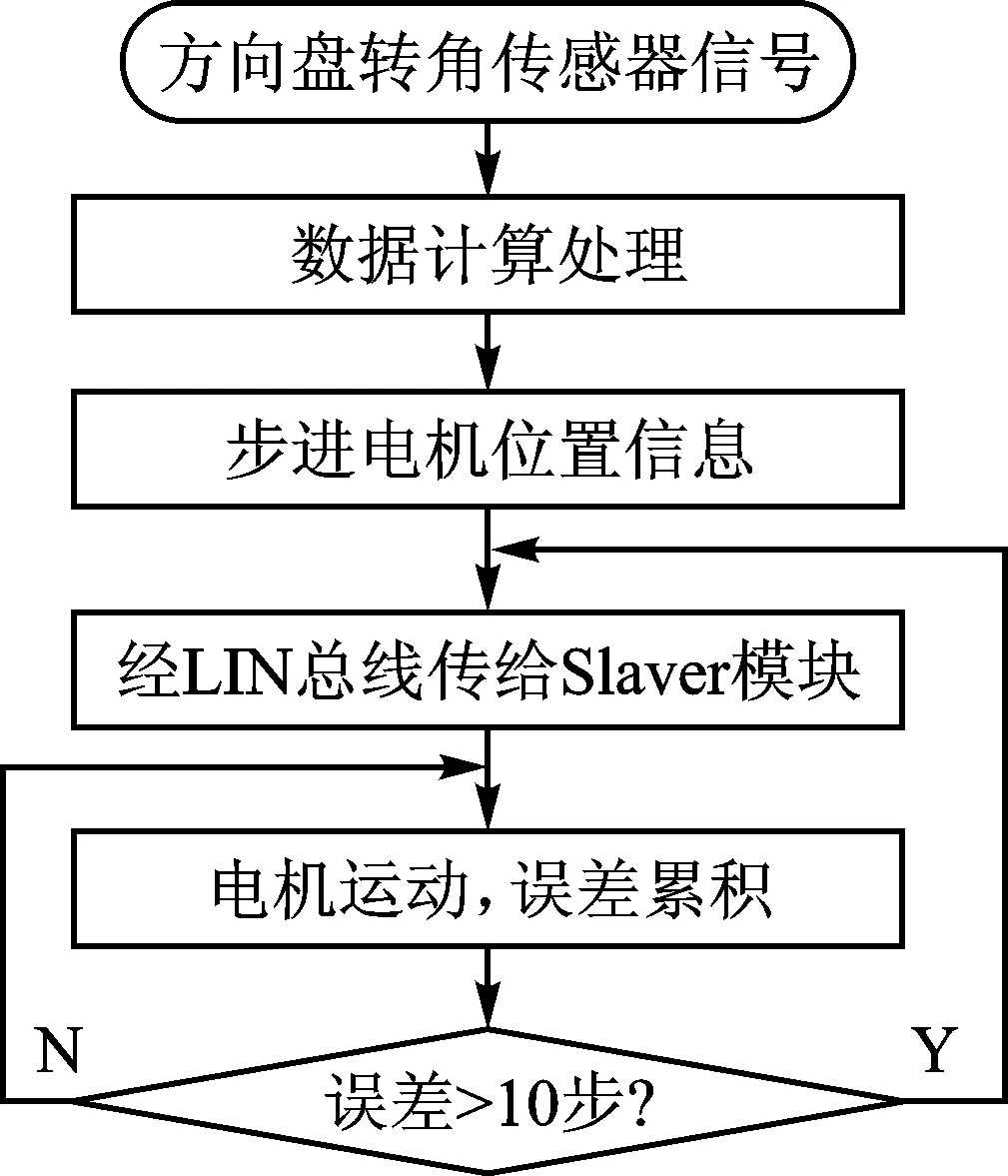
图10 电机控制流程图
式中,Y为实际转角度数;X为CAN数据值。根据式(1)得出,方向盘左、右转时传感器输出数据分别在[0,14 400]、[51 135,65 535]区间内,其测量范围为±900°,设定系统将有效调整范围为±540°。在Dave里配置相应的CAN模式,生成CANGetMeg()函数,配置函数的参数。软件部分流程图如图10所示。
2.1.2 垂直方向控制
实验测得前后轴高度传感器A/D转换值的上、下限,根据式(2)~(4)可得出电机位置值。最终的电机位置在常态位置的基础上做调整,前轴高度大于后轴时车灯上仰,式(4)取加,反之取减。

(2)
(3)

(4)
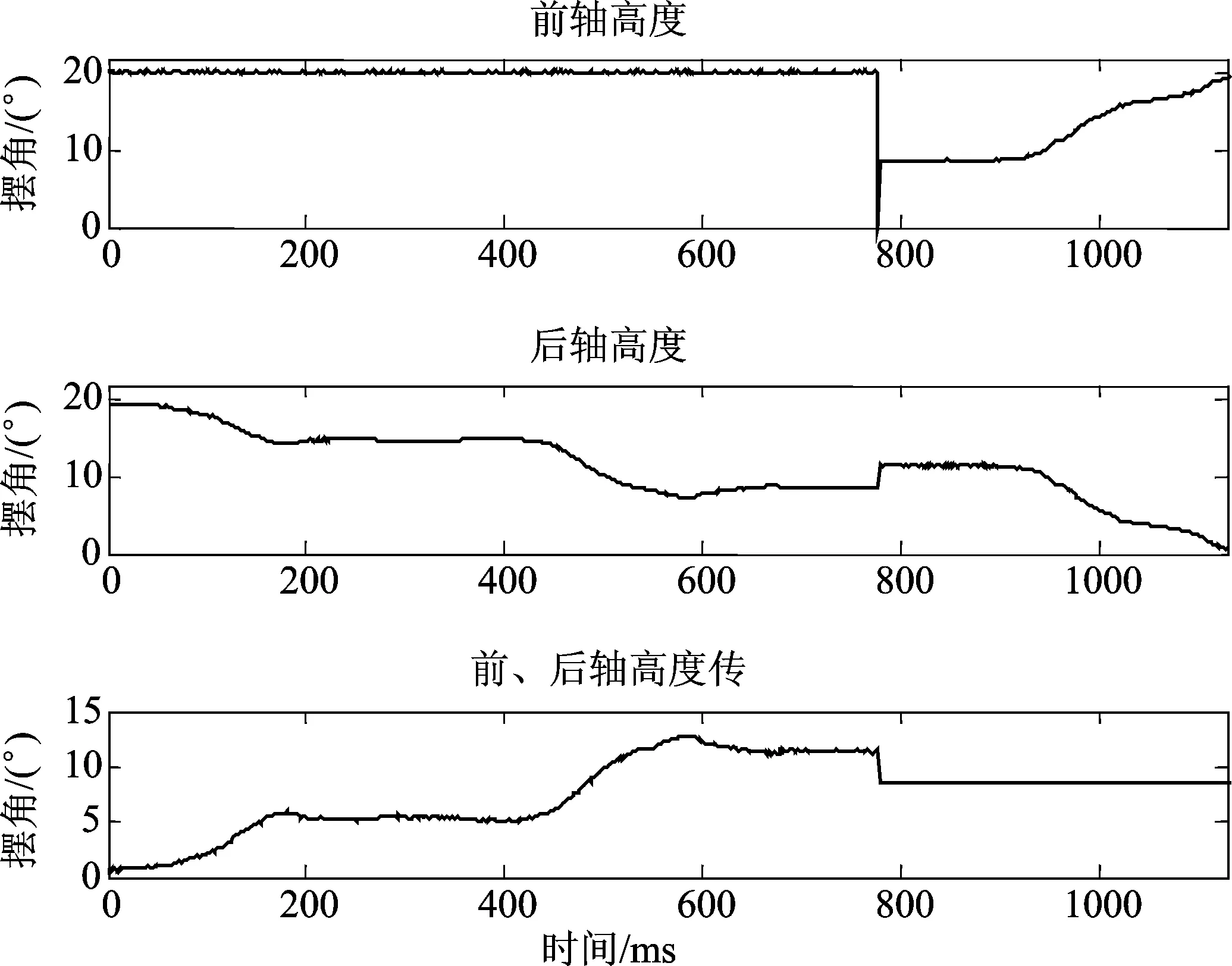
图11 高度传感器摆臂摆角
式中,adcResult、adcResult1为前、后轴高度传感器A/D转换结果,Differ为高度传感器A/D转换结果之差如图11所示,Max、Min分别为A/D转换结果之差的最大值、最小值,Ver_Differ为电机步数调整量,Horizontal_Ver为最终垂直方向的电机位置值。为防止车灯在颠簸路面频繁调整以及电机自身抖动,对电机位置值进行了中位值滤波。
2.2 模式控制
系统以速度为基准划分为不同的模式[24],根据视觉反应时间、车速和安全停车视距的关系,以及ECE123&48的近光配光规定,系统各模式近光配光控制策略如表3所列。
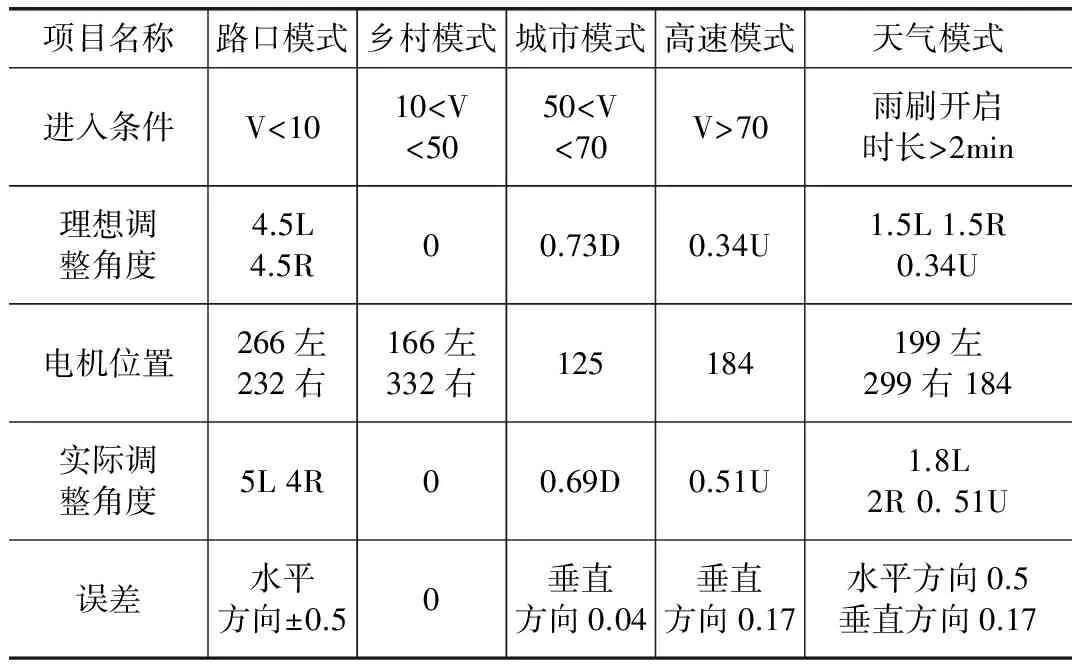
表3 各模式近光配光及转动角度实验数据
注:V为车速,单位为km/h;字母L、R、U、D分别代表向左、右、上、下调整;电机位置中左、右分别代表左灯、右灯。
路口模式主要用于路口等信号灯时,照亮人行道上的行人,故左灯左转4.5°、右灯右转4.5°,形成散开状;乡村模式作为基础近光,其他模式在乡村模式的基础上作调整;城市模式为防炫目向下调整0.73°;高速模式向上调整0.34°,实现更远照射;恶劣天气模式车灯向上调整0.34°,同时左灯向左1.5°、右灯向右1.5°,在中间形成小片暗影,可防止地面积水反光。
转角传感器、高度传感器与光型配置之间的优先级关系:传感器数据不变的情况下,系统按照表3进行配光,传感器数据发生变化且超过设定的阈值时,实时采集传感器数据,控制电机旋转,分别实现弯道模式和坡道模式。
3 实验结果及分析
实验测试了车速在0~120 km/h下车灯的自适应调节情况,分别实现路口、乡村、城市、高速4种模式。
其中,θL、θR分别为水平方向左、右车灯水平方向,θH为车灯垂直方向调整角度;θL为正表示左灯向左,θR为负表示右灯向右,θH为正、负分别表示向上、下;低速时进入路口模式,左右车灯分别向外4.5°,乡村模式属于车灯常态模式,城市模式车灯下俯实现防眩目,高速模式车灯上仰照射更远。由图12可以看出,按照表3的配光标准,误差可实现水平方向小于±0.8°、垂直方向小于±0.2°。
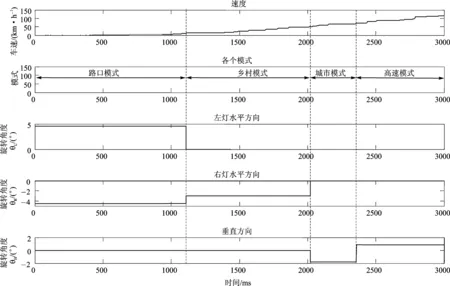
图12 各模式下前照灯调节情况
结 语

[1] Neumann R. System Integration in Automotive Lighting-Improvements in Visibility at Night[C]//International Body Engineering Conference & Exhibition and Automotive & Transportation Technology Congress, Paris France, 2002.
[2] 王书章.自适应前照灯系统(AFS)的研究[D].哈尔滨:哈尔滨工业大学,2013.
[3] 蒋永平.汽车主动转向头灯系统的研究[D].广州:华南理工大学,2010.
[4] Dong G, Hongpei W, Song G, et al. Study on adaptive front-lighting system of automobile based on microcontroller[C]//Transportation, Mechanical, and Electrical Engineering (TMEE), 2011 International Conference on. IEEE, Kyoto Japan, 2011:1281-1284.
[5] 邓亮,陈抱雪,张建彬,等.AFS前照灯弯道旋转的计算模型[J].中国机械工程,2011(7):864-869.
[6] 章奕航,王晓燕,方雅秀.汽车前照灯单侧灯光自动感应调节控制装置[J].汽车实用技术,2016(6):103-105.
[7] 戎辉, 龚进峰, 曹健,等. AFS系统关键技术研究[J]. 汽车电器, 2008(5):15-18.
[8] C. K. Chan, K W E Cheng, S L Ho, etal. Development of electric vehicle with advanced lighting system and all electric drive[C]//2009 3rd International Conference on Power Electronics Systems and Applications(PESA), HongKong China: IEEE, 2009:1-8.
[9] Yamamoto A, Makino Y, Horii Y. Optical Sensor Concepts for Future Head-Lighting System[J]. Anadolu kardiyoloji dergisi : AKD = the Anatolian journal of cardiology, 2007, 13(6):606-606.
[10] Lukacs L, Dassanayake M, Pepe I. Design of a Fuzzy Based AFS (Advanced Front Lightning System) to Improve Night-Time Driving for Truck Drivers: Foreseeing its Use in Emerging Markets[J]. Sae Technical Papers, 2014(1): 435.
[11] Kanchwala H. Development of an Intelligent Transport System for EV[J]. SAE International Journal of Passenger Cars - Electronic and Electrical Systems, 2015(1):9132.
[12] Su Y F, Chiang C B, Yang C H. Study of Vehicle All-in-One System with Single Camera[C]//20th ITS World Congress, Tokyo, 2013:1-10.
[13] Soloiu V, Augusma I, Lucien D, et al. Self-Driving Intelligent Vehicle to Increase Road Safety, Lower Congestion Rates and Decrease Emissions[C]//SAE 2016 World Congress and Exhibition, Detroit Michigan USA,2016:1-161.
[14] Magar S G. Adaptive Front Light Systems of Vehicle for Road Safety[C]//International Conference on Computing Communication Control and Automation IEEE, Paris France, 2015:551-554.
[15] 郑荣良, 胡永亮, 俞方磊. 基于CAN/LIN混合网络的智能汽车前照灯系统(AFS)的设计[J]. 拖拉机与农用运输车, 2009, 36(5):112-115.
[16] 林国余, 王东, 姚平. 基于LIN总线的主从式自适应前照灯控制系统[J]. 计算机测量与控制, 2011, 19(9):2143-2146.
[17] Bong Y K, Yun J K. The dependability analysis of LIN network for adaptive front-lighting system[C]//SoC Design Conference 2008 ISOCC '08 International IEEE, Busan Korea, 2008.
[18] 王飞.汽车用自适应前照灯系统(AFS)试验研究[J].自动化与仪器仪表,2016(9):59-61.
[19] Sung D U, Ryu Y H, Park S C. Durability Test Mode for LED Adaptive Front Lighting System by Failure Mode Effect Analysis[J]. Bmc International Health&Human Rights, 2015, 15(1):25.
[20] Infineon Technologies AG.16/32-Bit Architecture (XC2234L) User's Manual V1,2010.
[21] 王爽.英飞凌XE166/XC2000单片机开发与应用实例[M].北京:电子工业出版社,2014:325-331.
[22] Joshi M Singh H Kalia S K,et al.Differential Speed Based Bend Lighting in Adaptive Front lighting system[C]//International Mobility Engineering Congress and Exposition, Florida USA, 2009:22-28.
段海艳(硕士),主要研究方向为汽车电子、车载网络、单片机和车用传感器;宾洋(硕士研究生导师),主要研究方向为非线性系统分析与建模、最优化控制、车辆动力学控制、电动汽车控制及动力电池系统管理等领域的科学研究及工程应用工作。
Vehicle Adaptive Front-lighting Control System of Master-slave Structure
Duan Haiyan1,Fan Xiaojuan1,Hu Kunfu1,Bin Yang2,Luo Wenguang1,Zhu Shushan3
(1.College of Electrical and Information Engineering,Guangxi University of Science and Technology,Liuzhou 545006,China; 2. Chongqing University of Technology;3.Beijing Institute of Technology)
Vehicle Adaptive Front-lighting System(AFS) is an active safety system.In the paper,the AFS is constructed by a master-slaver structure,which is consisted by a AFS master module and a motor driven slaver module.At first,the AFS master module is used to collect the signals of the suspension height sensor,the steering wheel angle and the GPS sensor signals,in order to calculate the light angle of horizontal and vertical directions,and then transfers the command signals to stepping motors.Then,the stepping motor is used to receive the control command signals from the main control module,and drives a stepper motor movement to realize the headlights servo steering.Finally,a software algorithm and a hardware prototype are developed.The experiment results demonstrate that the system can realize the adaptive front-lighting turning according to the curved lane and pitch adjusting according to road slope,and it can achieve the management of lighting patterns according to different velocities.
adaptive front-lighting system;automatic control;signal acquisition;stepping motor drive
广西汽车零部件与整车技术重点实验室开放基金项目(项目编号:2013KFZD03)。
TP274+.2
A
�迪娜
2017-02-20)
