基于虚拟阻抗的微网下垂解耦改进控制策略研究
2017-07-31王林川孙志龙
王林川,魏 建,孙志龙
(东北电力大学,吉林 吉林 132012)
基于虚拟阻抗的微网下垂解耦改进控制策略研究
王林川,魏 建,孙志龙
(东北电力大学,吉林 吉林 132012)
基于下垂控制的微网控制策略,可以实现无信号互联的多逆变型微源并联运行,运行可靠性高,控制结构简单。但传统的下垂控制基于线路的阻抗为感性为主,而实际中微网多并联与中低压配网当中,其线路以电阻性为主,不满足传统下垂解耦控制的要求,影响下垂控制效果。针对这一问题,首先对线路的功率传输特性进行分析,得出下垂解耦控制的条件。其次,在传统下垂控制中加入虚拟阻抗控制,优化线路的阻感比,同时在下垂控制中加入线路阻抗压降,实现无功功率精确分配。最后,在matlab/Simulink环境下搭建微网控制模型,验证控制策略的有效性。
微电网;分布式电源;下垂控制;电压电流双闭环;虚拟阻抗
1 引言
随着全球能源枯竭,环境日益恶化,微网以其清洁、自制、友好等特点受到广泛的关注。[1]微网是由分布式电源(DG)、储能装置、负荷以及监控保护系统组成的小型发配电系统[2],具有并网和孤网两种运行模式。稳定运行时,微网与大电网并联运行,为电网提供一定功率支撑。当检测到大电网或微网内部故障时,微网通过静态开关自动与大电网断开,形成孤网运行模式,继续为微网内部负荷供电,从而提高供电的可靠性。
现有的微网的控制方式主要分为主从控制和对等控制两大类[3]。前者利用全局信息实现控制,对通信的要求较高;后者通过模拟发电机的P-f,Q-V静态下垂特性,利用本地信息实现控制,无需信号线互联且鲁棒性较好,有利于实现“即插即用”功能,因此被广泛运用于微网的控制中。传统的发1电机运行于感性的电网中,发出的有功功率与相角差强相关,无功功率与电压差强相关,因此可以实现在感性环境下的PQ解耦控制。但微电网多为中低压网络,线路以阻性或阻感性为主,难以实现V/f下垂解耦控制,从而减弱了下垂控制的效果。
本文以微网中的逆变器并网型微源为研究对象,针对传统下垂控制难于在中低压微网中实现功率解耦控制,在传统的下垂控制的基础上,加入了虚拟阻抗控制环节,优化线路阻感比,实现PQ解耦控制。其次,在传统下垂控制的基础上,加入了有功功率和无功功率的微分环节,改善下垂并联控制的动态性能。最后在仿真平台Matlab/Simulink上对所提出的控制策略进行仿真验证。
2 微电网结构
本文研究的微网结构如图1所示。微网中的分布式电源认为是直流电压源或经过整流器后得到的直流源,经过逆变器变换为交流后经馈线与微网交流母线相连。由于微网内的DG与微网交流母线距离不等,因此馈线阻抗也各不相同。微网经静态开关与大电网相连,实现并离网双模式运行。DG均采用无互联线的下垂控制策略进行控制,发出的功率首先供给本地负荷,多余的功率经过馈线输送给公共负荷。
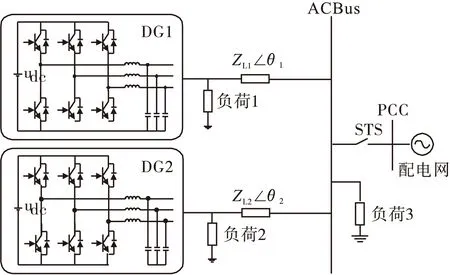
图1 微网结构
3 下垂控制原理分析
为了分析单台DG的功率传输特性,将其等效为如图2所示的简化电路。图中,DG输出电压和公共连接点(PCC)电压分别为U0∠δ和UPCC∠0,逆变器与PCC之间的馈线阻抗ZL=R+jX。
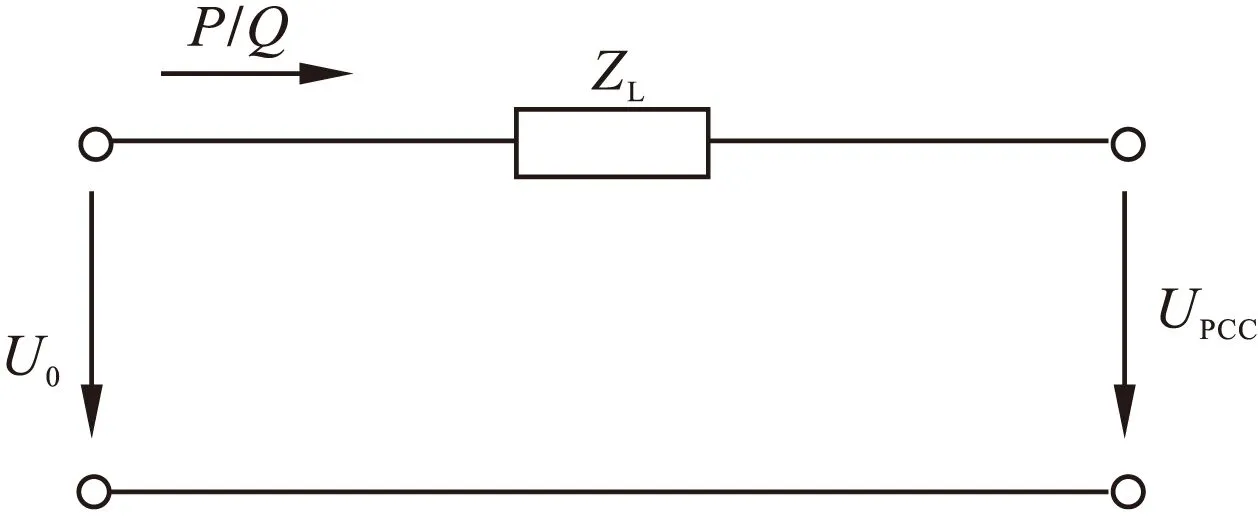
图2 单台微源简化等效电路
逆变器输出有功和无功功率表达式为:
系统稳定运行情况下,功角δ较小,则有sinδδ和 cosδ=1。同时,假定线路以感性为主,则有X>>R,对上式化解得:
式中ΔU=U0-UPCC。由上式可以看出,微源可通过调节输出电压相位δ来调节有功功率的输出,通过调节输出电压幅值U0来调节无功功率的输出,从而实现微源对输出有功功率和无功功率的解耦控制。由于电压的相位不易测量,频率与相角存在积分关系,因此可以通过调节频率来间接实现对电压相位的调节。由此构造的下垂控制方程为:
ω=ω0-mP
U=E0-nQ
式中ω0和E0分别为微源空载时的角频率和电压幅值;m和n分别为电压角频率和幅值的下垂系数。当微源输出的有功功率突然增大,下垂控制使微源输出电压的频率降低,减小其相角,从而减少有功输出,反之则增加输出;电压幅值和输出无功也有相同的特性。因此,下垂控制具有内在负反馈的过程,若参数选取适当,可最终达到稳定状态,实现负荷在微源间的共享[4]。
4 基于虚拟阻抗的改进下垂控制
以上关于下垂控制的推导是以线路感性X>>R为前提的,实际中微网大多接于中低压配电网中,线路阻抗以电阻性为主,因此对下垂解耦控制产生不利影响。为了解决这一问题,有的学者提出通过串联外接电感,调节线路的阻抗使其为感性,但这会使成本增加,降低经济性。因此,可以通过调整控制系统结构和参数来调节微源输出阻抗,优化线路阻感比。
4.1 电压电流双闭环控制
微源采用的是传统的电压电流双环控制结构如图3所示,其中外环为输出电压外环,采用PI控制,稳定输出电压;内环为电感电流内环,采用比例控制,提高系统的动态性能[5]。
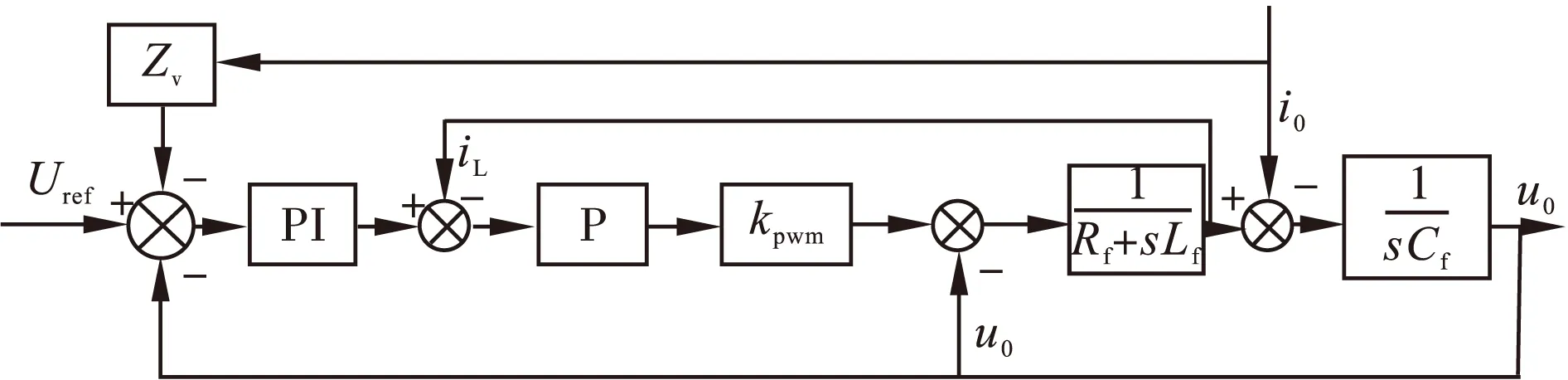
图3 电压电流闭环控制框图
微源输出电压的传递函数为:
U0=G(s)Uref-Z0(s)·i0
其中G(s)为电压增益,反映了受控电压对电压指令Uref的跟踪性能;Z0为微源的等效输出阻抗,由公式可以看出其大小不仅受滤波器参数的影响,还和控制器参数密切相关。由于上述微源控制参数的设计必须以保证控制器稳定为前提,因此对微源输出阻抗的调节范围小,使得该方法在实际应用中,存在相对较大的局限性[6]。
4.2 虚拟阻抗控制
虚拟阻抗控制是在原有的电压参考值的基础上减去输出电流在虚拟阻抗Zv上的压降,得到新的电压参考值,等效外接电感对微源输出电压的影响,其表达式为:
代入输出电压的传递函数得:
U0=G(s)Uref-(Z0(s)+G(s)ZV)·i0=
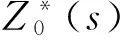
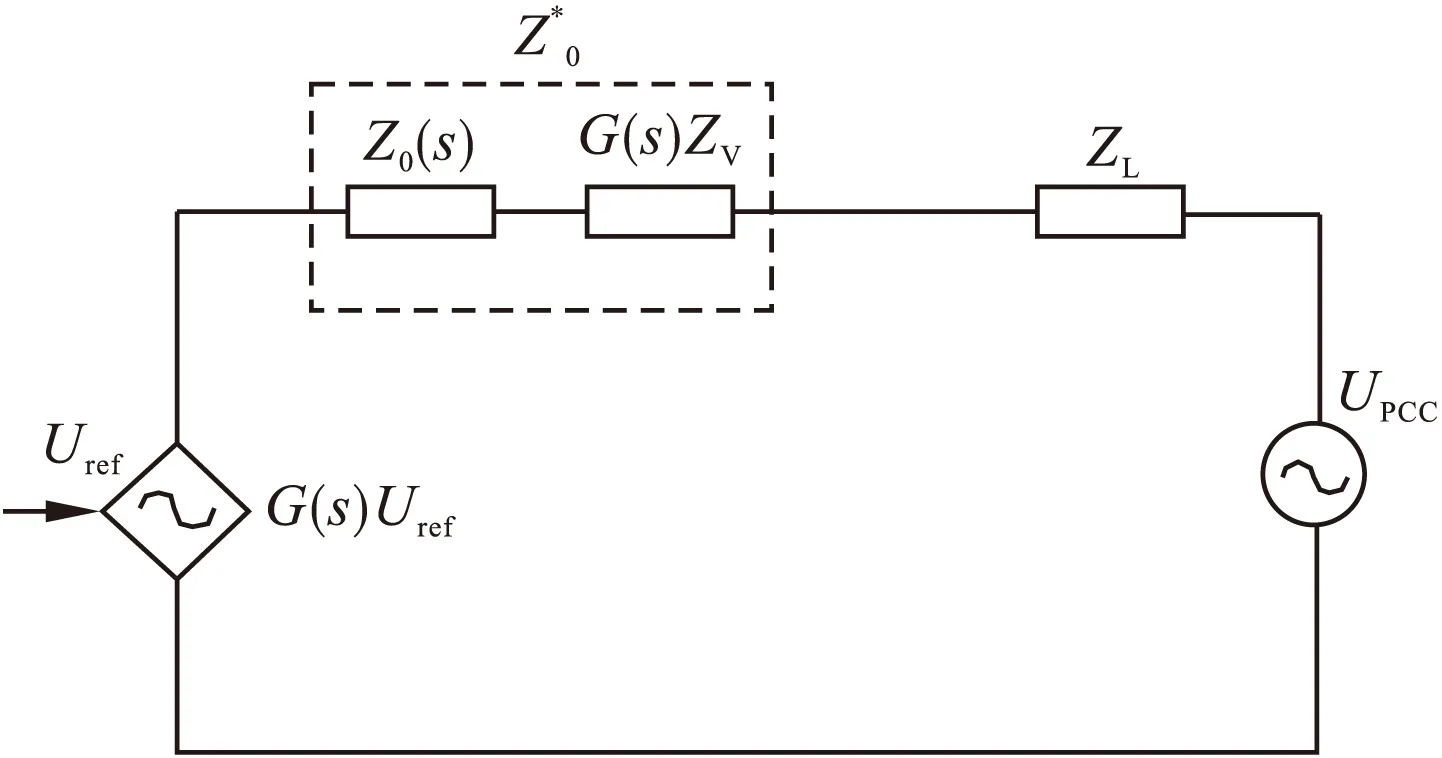
图4 基于虚拟阻抗的等效电路

4.3 下垂控制策略改进
同时,为了提高下垂控制的动态性能,在传统的下垂控制当中加入有功无功功率的微分项,改进后的控制方程变为:

式中md和nd为微分项下垂系数。
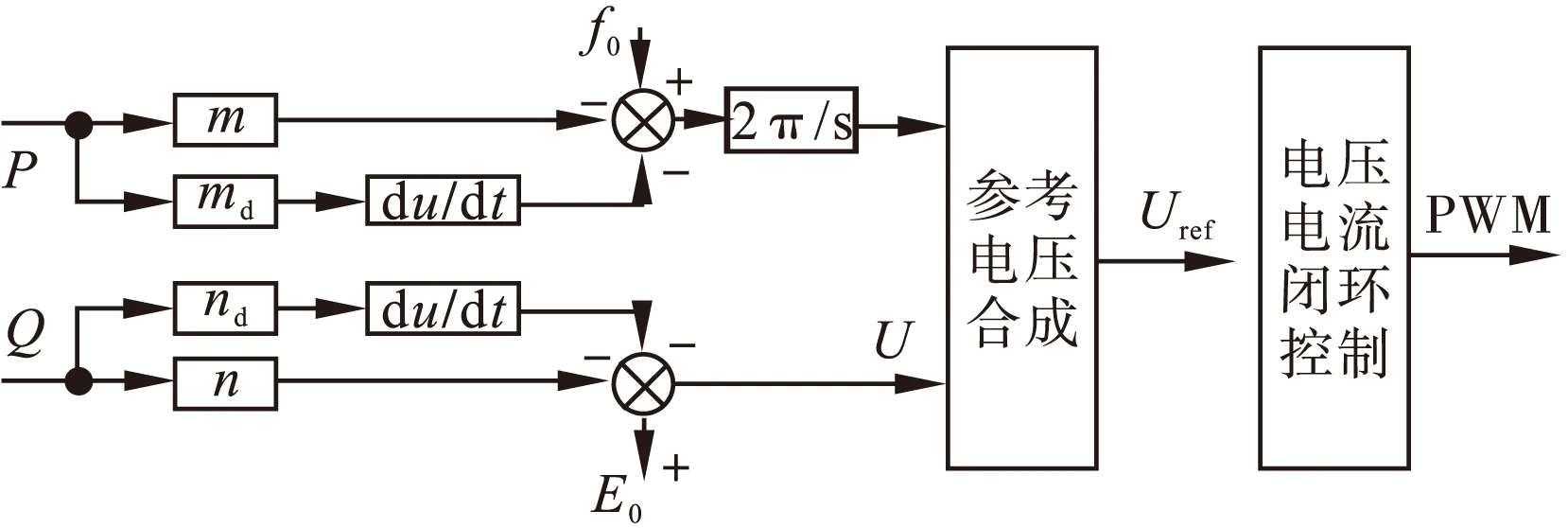
图5 改进后的下垂控制框图
5 仿真分析
为了验证提出的控制策略的有效性,本文采用的仿真结构图如图1所示。两台逆变型微源经过输电线路与交流母线相连,实现并联运行。系统电压为380V。两台DG的参数相同,容量均为30kVA,额定频率50Hz,空载电压幅值为311V。负荷1和负荷2为本地负荷,均为10kW+5kVar;负荷3为公共负荷,为20kW+10kVar。线路参数为0.64+j0.101Ω/km,线路1长度为0.5km,线路2为1km。
仿真开始时,本地负荷投入,0.3s时公共负荷投入。仿真时间设为1s。首先,采用传统下垂控制进行仿真分析,仿真结果如6所示。
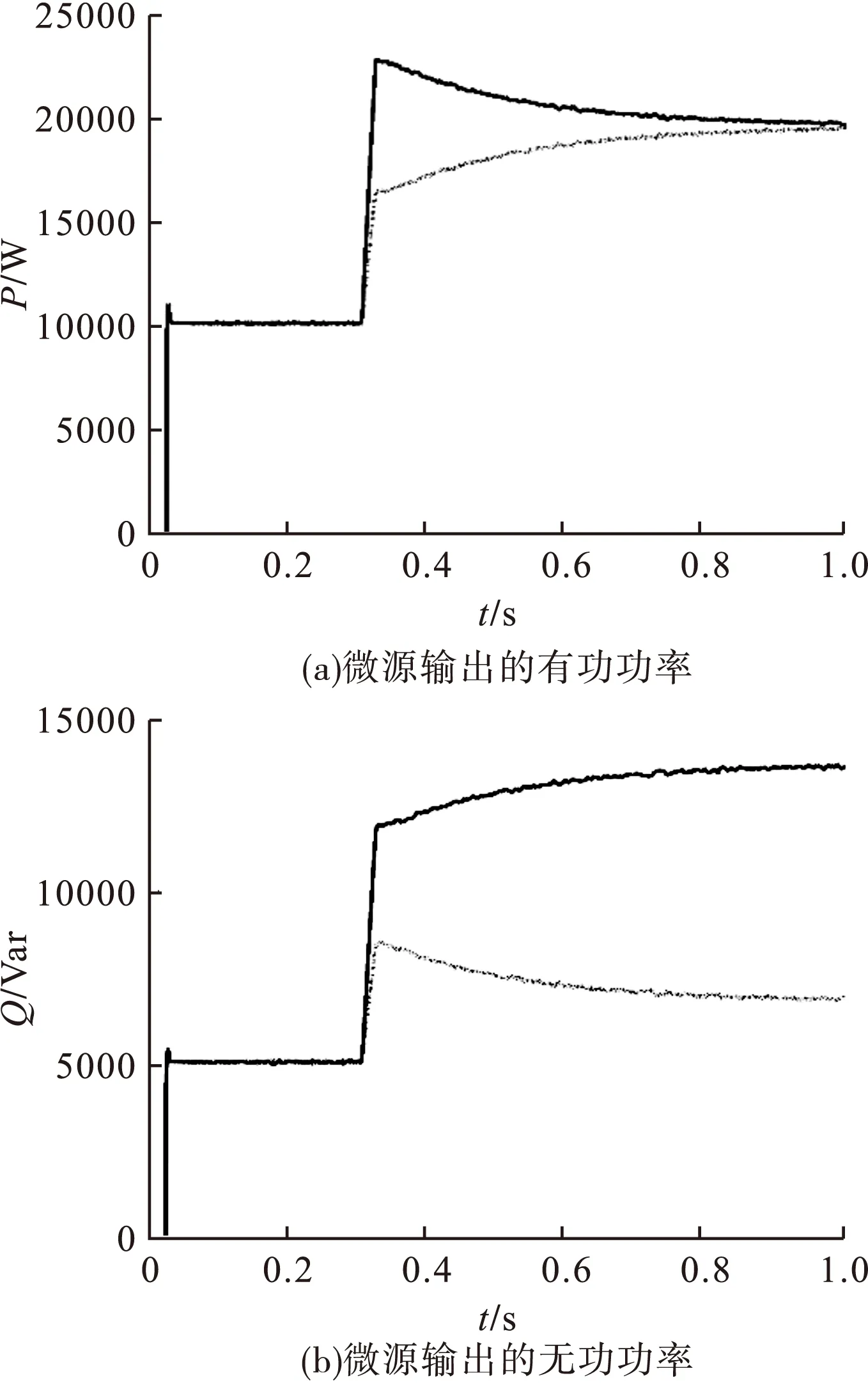
图6 传统下垂控制微源有功无功波形
如图6所示,实线为DG1发出的功率,虚线为DG2发出的功率。由于线路阻抗不是以感性为主,有功无功间存在耦合,影响下垂控制的效果。采用本文提出的控制策略后,仿真结果如图7所示。

图7 基于虚拟阻抗改进后微源有功无功波形
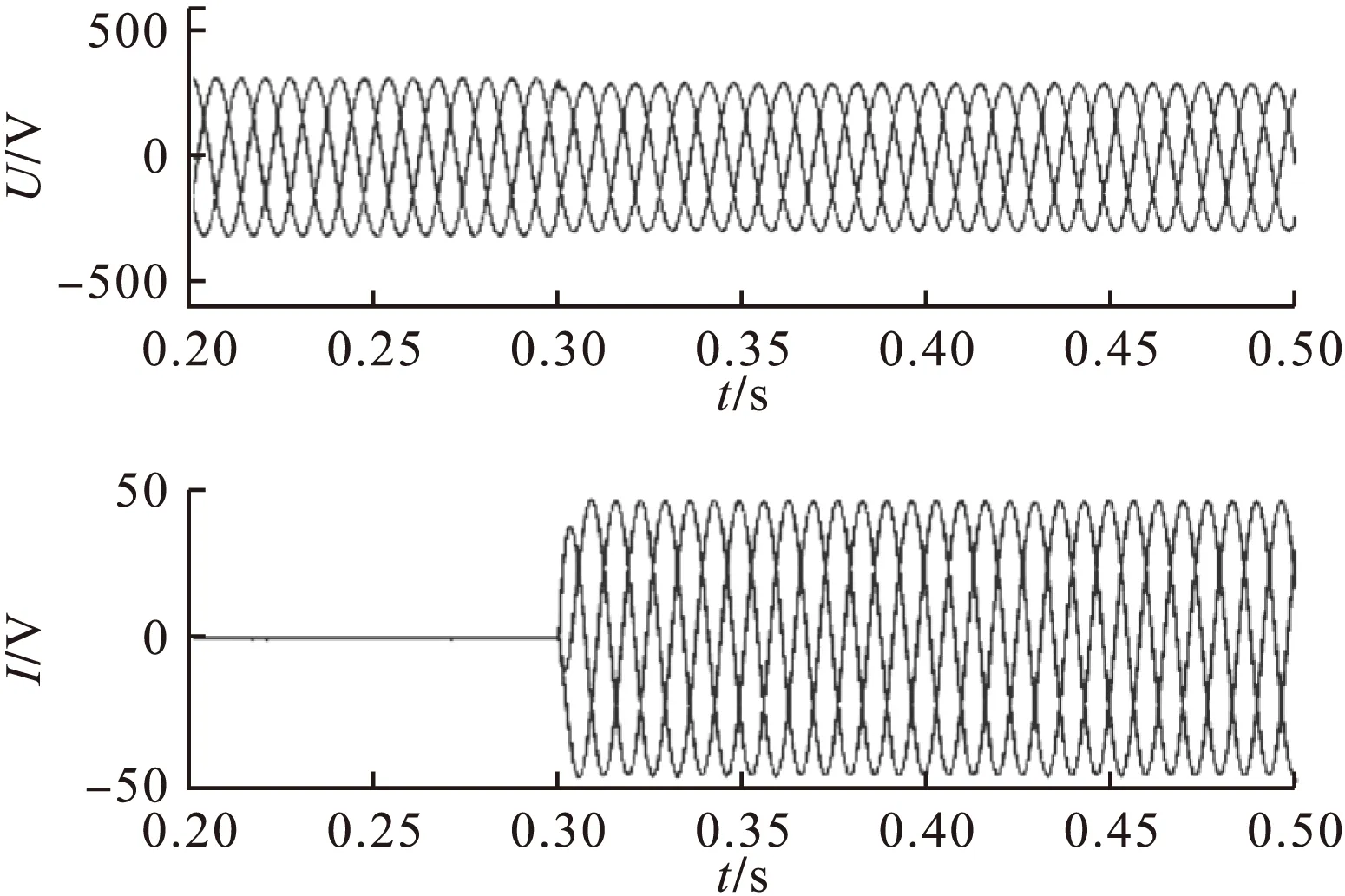
图8 PCC处电压电流波形
由于虚拟阻抗的加入,优化了线路的阻感比,降低了功率间的耦合关系,实现了有功和无功的解耦控制,验证了控制策略的有效性。由于频率是全局变量,达到稳态时各微源输出频率相等,均分有功负荷。但受馈线阻抗不等的影响,无功功率没有在微源间实现均分。
6 结论
微网多并联运行与低压配电网当中,输电线路以阻性为主,不满足传统下垂控制的解耦条件。虚拟阻抗的加入,可以在较大范围灵活调节微源的等效输出阻抗,从而优化线路阻感比,实现基于传统下垂特性的解耦控制。由于线路阻抗不匹配导致无功功率分配不均的问题,将在下一阶段进行研究。
[1] 杨新法,苏剑,吕志鹏,等.微电网技术综述[J].中国电机工程学报,2014,1:57-70.
[2] 王成山,肖朝霞,王守相.微网综合控制与分析[J].电力系统自动化,2008,7:98-103.
[3] 张明锐,杜志超,黎娜,等.高压微网孤岛运行时频率稳定控制策略研究[J].中国电机工程学报,2012,25:20-26.
[4] 程军照,李澍森,吴在军,等.微电网下垂控制中虚拟电抗的功率解耦机理分析[J].电力系统自动化,2012,7:27-32.
[5] 王成山,肖朝霞,王守相.微网中分布式电源逆变器的多环反馈控制策略[J].电工技术学报,2009,2:100-107.
[6] 荆龙,黄杏,吴学智.改进型微源下垂控制策略研究[J].电工技术学报,2014,2:145-152+184.
[7] 王波一,王鹤,兰森,等.基于改进微分进化算法的微电网优化运行研究[J].东北电力大学学报,2013,Z1:27-32.
[8] 黄杏,金新民.微网用分布式电源变流器下垂特性控制策略[J].电工技术学报,2012,8:93-100.
Research on Droop Decoupling Control Strategy of Microgrid Based on Virtual Impedance
WANG Lin-chuan,WEI Jian,SUN Zhi-long
(Northeast Powor University,Jilin 132012,China)
The control strategy based on droop control can realize the multi-microsource parallel operation with no signal interconnection,running reliability and simple structure control.But conventional droop control based on the line impedance is inductive mainly,and actual in microgrid multiple parallel and in the low voltage distribution network,the line with the resistive based,does not meet the requirements of the traditional droop decoupling control,influence droop control effect.In view of this problem,the power transmission characteristic of the line is analyzed firstly,and the condition of the droop decoupling control is obtained..Secondly,in the traditional droop control,the virtual impedance control is added,the impedance ratio of the optimized line is controlled,and the active reactive power is controlled independently.Finally,the microgrid control model is established under the simulation software matlab/Simulink.The simulation result verifies the effectiveness of the control strategy.
microgrid;distributed generation;droop control;voltage and current closed-loop;virtual impedance
1004-289X(2017)01-0041-04
TM71
B
2015-12-23
王林川(1955-),男,教授,研究方向为电力系统稳定与控制。
