西门子S7-1200在自动化线的运动控制及应用
2017-07-31姜志艳
姜志艳
(中国电子科技集团公司第二研究所,山西太原030024)
西门子S7-1200在自动化线的运动控制及应用
姜志艳
(中国电子科技集团公司第二研究所,山西太原030024)
利用TIA Portal平台结合CPU S7-1200的“运动控制”功能,通过脉冲发生器(PTO/PWM)的高速脉冲接口控制步进电机和伺服电机,利用内置PROFINET接口实现多台1200之间I-Device(智能设备),可用于4轴以上高速脉冲输出,实现多轴伺服电机及步进电机的精确控制。
脉冲发生器;运动控制;智能设备
S7-1200CPU能够提供一个脉冲输出和一个方向输出,通过脉冲接口对步进电机驱动器或伺服电机驱动器进行控制,脉冲输出为驱动器提供电机运动所需的脉冲,方向输出则用于控制驱动器的行进方向。本系统采用PROFINET接口实现两台CPU1214的智能连接,第一台CPU1214作为master主站用于上位机的数据交互及四台步进电机的运动控制,第二台CPU1214作为slave从站用于伺服电机的精确运动控制。
1 系统总体方案
在本传输系统中上位机采用具有以太网网口的上位系统,这样方便整个系统的远程控制,主从CPU均采用晶体管输出的控制器。在此系统中主要实现I-Device(智能设备)的控制及轴工艺控制。
1.1 各部分功能
功能如图1所示,上位机与主CPU进行通信连接,实现各种功能的转换及数据交换,主PLC控制I/O输入输出设备及4台步进电机的运动控制,从PLC的功能实现两台伺服电机的运动控制,同时通过I-Device与主PLC实现数据交换。

图1 系统功能简图
1.2 系统硬件设计
系统需配备具有Ethernet连接的网口模块,工控机及触摸屏皆可,硬件系统由两台CPU1214来实现,如图2所示。
其中PLC_1为主CPU可根据系统配置相应的IO扩展模块,最多一个PLC可配置8个扩展模块如图3。本系统配置6个IO扩展模块。
电机与PLC功能关系如图4所示。

图2 系统网络拓扑

图3 PLC_1硬件组态
2 系统方案的实现
2.1 I-Device(智能设备)的控制
S7-1200智能IO设备(I-Device)是非常实用的功能,不需占用通信资源,也不需要编写复杂程序。本系统采用两台S7-1200系列的CPU1214C作为硬件项目的主CPU,可以实现与上位机及系统其他主CPU通讯,本系统全部采用网口连接因此采用5口交换机。在博途软件的同一项目中组态两个硬件项目,分别是PLC_1和PLC_2,其中PLC_1作为IO-Controller,PLC_2作为IO-Device,见图5所示。
网络连接完成后,需要对PLC_2进行设置如图6,开辟一块存储空间作为数据传输区根据程序需要进行传输区设置,根据系统需要建立两个传输区,传输区区不能占用已用的IO地址,PCL2的输入区对应的为PLC1的输出区,PCL2的输出区对应的为PLC1的输入区,这两个传输区分别用于接收数据及发送数据,在本系统中传输区字节长度为80个字节,在PLC2中I16-I96对应的为PLC1中的Q16-Q96,来实现两个CPU的数据交互。
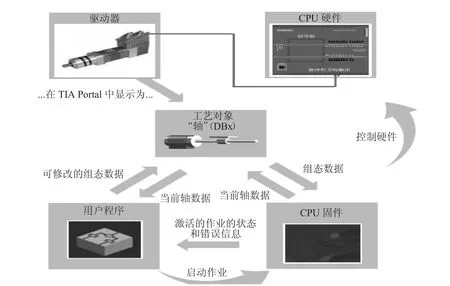
图4 电机与PLC功能关系

图5 S7-1200不同CPU网络连接

图6 PLC1与PLC_2的智能连接配置
根据程序内容将所需内容赋给传输区,Master PLC_1就会接收相应的数据 如图7所示,将PLC2中伺服电机当前值,赋给QD18,在PLC1中ID18就是伺服电机当前值,其他交换数据也需在程序中定义,通过这种智能转换来实现数据交换。
2.2 S7-1200实现轴工艺的运动控制
在TIA Portal中,可以组态“轴”和“命令表”工艺对象。CPU S7-1200可以使用这些工艺对象控制用于控制驱动器的脉冲和方向输出。通过脉冲接口控制步进电机和伺服电机运行的运动控制功能,运动控制功能负责对驱动器进行监控。在设备组态期间,可以在“属性”(Properties)选项卡的脉冲发生器(PTO/PWM)中,选择板载CPU输出。根据硬件配置完成如图8所示的步进电机及伺服电机的轴设置。

图7 智能连接的程序转换

图8 S7-1200与电机的控制图
2.2.1 脉冲接口的工作原理
根据步进电机的设置,每个脉冲会使步进电机移动特定角度。本系统中要求精确控制的步进电机分辨率设置将步进电机设置为每转10 000个脉冲,电机每转的距离根据机械尺寸可以自己定义,步进电机每转设为60 mm,如图9步进电机的速度通过每单位时间的脉冲数来确定。
(此处所做的说明同样适用于带脉冲接口的伺服电机)
2.2.2 轴工艺设置
包含机械的物理驱动器在TIA Portal中映射为“轴”工艺对象。为此,需要使用以下参数组态“轴”工艺对象:
(1)要使用的PTO(Pulse Train Output,脉冲串输出)的选择选项和驱动器接口的组态;
(2)机械参数和驱动器(机器或系统)的传动比参数;
(3)位置监视参数、动态参数和回原点参数。
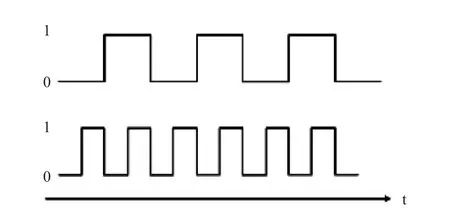
图9 电机的速度对比
“轴”工艺对象的组态保存在该工艺对象(数据块)中。该数据块也将作为用户程序和CPU固件间的接口。用户程序运行期间,当前的轴数据保存在该工艺对象的数据块中(见图10)。其他运动参数根据系统功能不同来完成设置。
2.2.3 用户程序
可以使用用户程序启动CPU固件中的运动控制指令作业。包括以下用于控制轴的作业:
·绝对定位轴·相对定位轴
·以设定的速度移动轴

图10 轴工艺设置
·按移动顺序运行轴作业
·在点动模式下移动轴
·停止轴
·参考轴;设置参考点
·确认错误
可以通过运动控制指令的输入参数和轴组态,确定命令参数。该指令的输出参数将提供有关状态和所有命令错误的最新信息。启动轴命令之前,必须使用运动控制指令“MC_Power”启用轴。可以使用工艺对象的变量读取组态数据和当前轴数据。可以通过用户程序更改工艺对象的单个可更改变量(例如,当前加速度)。
在本系统中自动控制状态下步进电机只要采用两种方式,一种是高速下走相对定位,停止信号主要取决于定位完成,这种控制方法在没有外力干扰的情况下可以实现精确定位;另外一种采用定位+速度的混合运动模式,停止信号采用外部传感器信号,这种控制方法既可以保证传输机构的运转速度,又能控制停止位置。
当轴已正确启用后,可以使用运动控制指令“MC_Home”,将轴坐标与实际的物理驱动器位置进行匹配。轴的绝对定位需要归位(见图11)。可执行以下类型的归位:
(1)主动归位(Mode=3)动执行归位步骤。检测到回原点开关时,轴即回原点。
(2)直接绝对归位(Mode=0)将当前的轴位置设置为参数“Position”的值。
运动控制指令“MC_MoveAbsolute”启动轴定位运动以将其移动到某个绝对位置。通过运动控制指令“MC_MoveRelative”,启动相对于起始位置的定位运动。
·已正确组态工艺对象“轴”
·轴已启用
·轴已归位
图12为绝对定位及相对定位的指令及功能图,可以根据程序需要进行速度模式的程序编写。
图13所示流程为伺服电机绝对定位完成后,启动步进电机运行信号,转相对定位,当定位完成,收到定位完成信号转化为速度模式,校正后转相对定位的例子。
2.2.4 与I-Device连接结合使用
伺服电机的运动参数通过I-Device连接由PLC_2传送,再由PLC_1向PLC_2发送命令执行相应动作。如图14所示,PLC_1程序中将各种绝对定位动作的执行作为条件输出绝对定位的启动Q16.6,传输区Q16.6对应在PLC_2中I16.6,作为绝对运动的启动条件。
当 PLC_1满足条件输出 Q16.6时,PLC_2中的I16.6置1,轴 1执行绝对定位动作如图15所示。
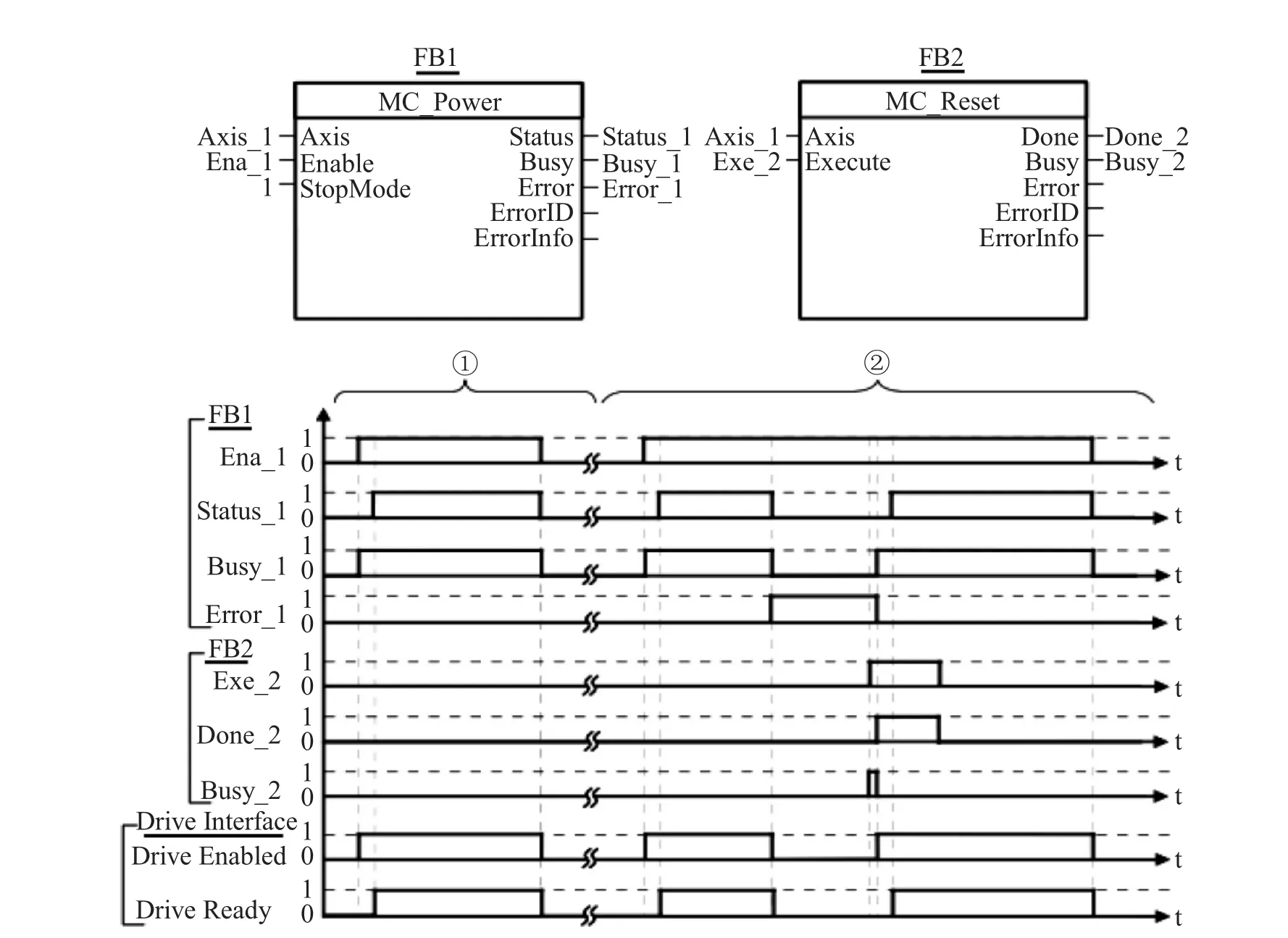
图11 轴的绝对定位归位

图12 绝对定位及相对定位功能图
当PLC_2绝对定位完成后,输出定位完成信号Q16.5,同时PLC_1对应的I16.5收到定位完成信号,可以作为下一个动作执行的信号。其他伺服动作均可以按照此映射实现。

图13 绝对定位转相对定位
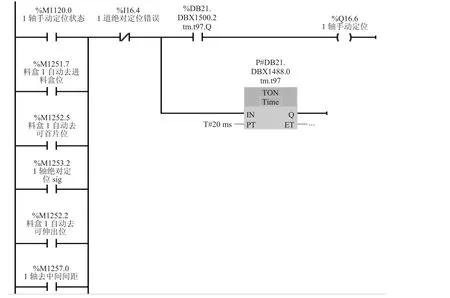
图14 PLC_1发送命令PLC_2执行动作
3 结 论
S7-1200用于运动控制灵活、功能强大,可满足各种各样设备的自动化需求,包含布尔逻辑、计数、定时、复杂数学运算以及与其它智能设备的通信。通信接口(CM、CP或CB)支持多种协议,如点对点 (PTP)协议、Modbus协议、USS协议和GPRS(调制解调器)协议、安全CP协议和远程控制CP协议,能满足不同的应用需求。
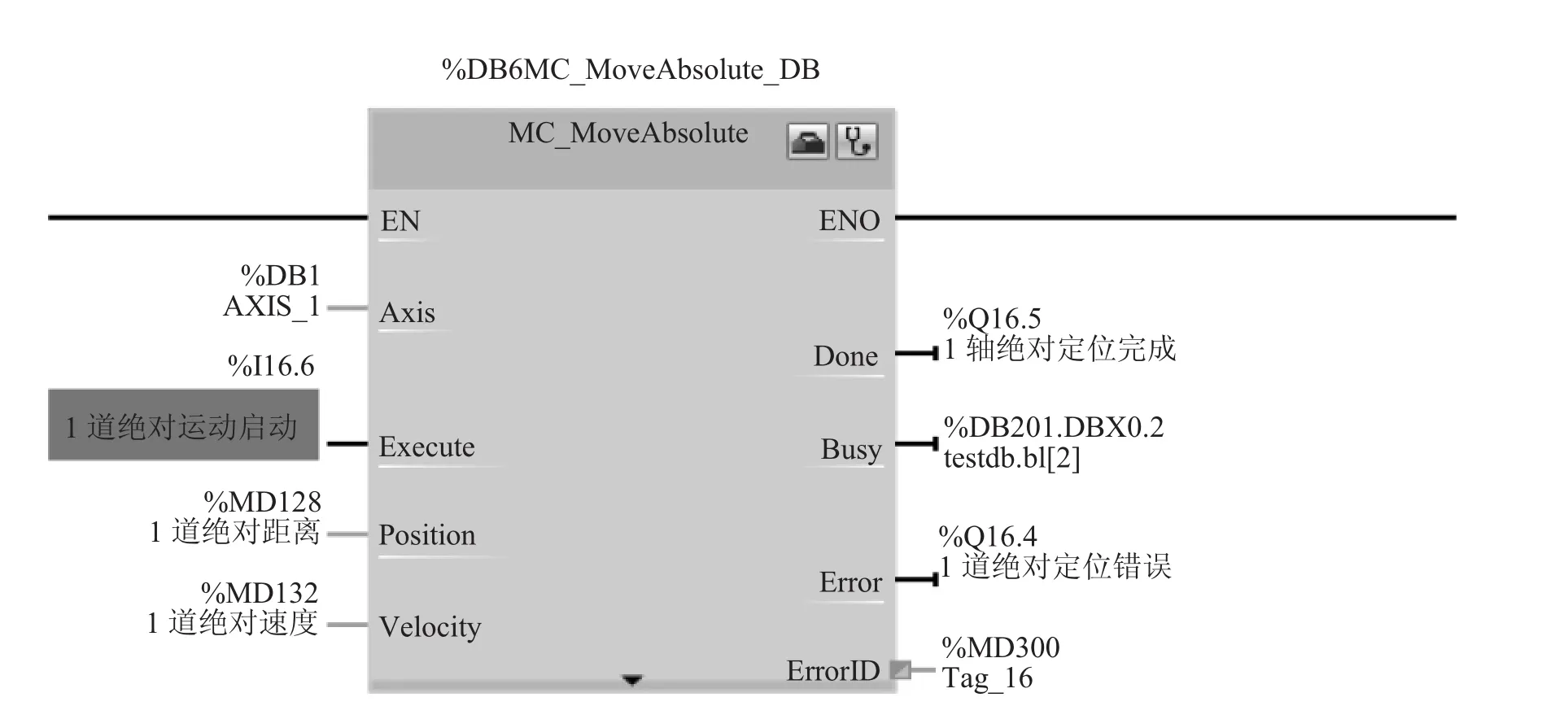
图15 轴1执行绝对定位
[1] 西门子(中国)有限公司.深入浅出西门子S7-1200 [M].北京:航空航天大学出版社,2009.
[2] 廖常初.可编程控制器应用技术[M].2版.重庆:重庆大学出版社,1998.
Motion Control and Application of Siemens S7-1200 in Automatic Line
JIANG Zhiyan
(The 2ndResearch Institute of CETC,Taiyuan 030024,China)
This article mainly uses the TIA Portal platform to control the CPU S7-1200"motion control"function,through the pulse generator(PTO/PWM)high-speed pulse interface control stepper motor and servo motor,the use of built-in PROFINET interface to achieve multiple between 1200 -Device (intelligent device),can be used for more than 4-axis high-speed pulse output,multi-axis servo motor and stepper motor to achieve precise control.
PTO/PWM;PROFINET interface;I-Device(intelligent device)
TM301.2
B
1004-4507(2017)03-0066-08
姜志艳(1980-),女,黑龙江佳木斯市人,工程师,本科,主要从事电子专用设备电气控制设计。
2017-04-13
