参数变化对约束变胞机构构态变换随机性的影响
2017-07-21李小彭高建卓李加胜李树军
李小彭,高建卓,李加胜,李树军
参数变化对约束变胞机构构态变换随机性的影响
李小彭,高建卓,李加胜,李树军
(东北大学机械工程与自动化学院,辽宁沈阳,110819)
为了研究等效阻力梯度模型的影响因素在变胞机构的运动过程中的变化,以等效阻力梯度模型为基础,对一种常见的约束变胞机构的构态变换的随机性进行分析。研究结果表明:主动件转速、弹簧刚度、外力、外力矩和阻尼系数对约束变胞机构构态变换随机性的影响程度是依次减弱的。
变胞机构;约束变胞过程;随机构态;等效阻力梯度
变胞机构的研究起源于1995年纸盒包装的研 究[1]。DAI等[2]探讨了变胞机构的构态变换问题。PARISE等[3]引申出变胞正交机构。DAI等[4−5]实现了不同阶矩阵变换,该方法将变胞机构的构态变换转化为矩阵运算,对变胞机构的拓扑描述和构态变换进行了研究。LI等[6]利用图论对变胞机构的构态变换进行了研究,得到了一些新的变胞构型。CHEN等[7]发明了水下变胞车。DAI等[8]探讨了变胞机构的变胞方式,并阐明了数学模型在变胞构态演变中的应用。LI等[9]提出了经过改进的半加法器计算。李树军等[10]提出了一种模块化构造变胞机构的新方法,系统研究变胞机构结构组成问题,并得出平面和空间的变胞机构都能用所给出的自由度为1的模块构造而成,实现了系统的设计变胞机构。李树军等[11]提出了等效阻力梯度这一概念。张武翔等[12]根据变胞机构的多构态特性及其约束变化特征分析结果,给出约束变化的实现方式,提出变胞运动副的设计原则,并提出了一种基于约束变化特征分析的变胞机构构型综合方法。畅博彦等[13]以空间变胞并联仿生关节机构为例子,约束旋量原理被引入到变胞机构的构型综合的研究中,使得变胞机构的结构学的理论研究体系更加完善。本文作者分析变胞机构在构态变换过程中产生随机构态的原因,并对一种常见的变胞机构约束模型进行动态静力分析,总结了影响等效阻力梯度的主要因素。然后对约束变胞机构的构态变换的随机性进行分析,得出主动件转速、弹簧刚度、外力、外力矩和阻尼系数对约束变胞机构构态变换随机性的影响。
2.1 一般情况 166例2型糖尿病患者中,男性100例(60.24%),女性66例(39.76%);510例非2型糖尿病患者中,男性276例(54.12%),女性234例 (45.88%)。
1 约束变胞机构模型的建立
欠驱动是常见的只有1个原动件的2自由度五杆机构[14],冗余自由度为1,机构的运动时序和构态均不确定,在运动过程中会表现为混沌运动。故可以建立约束变胞机构模型,如图1所示。
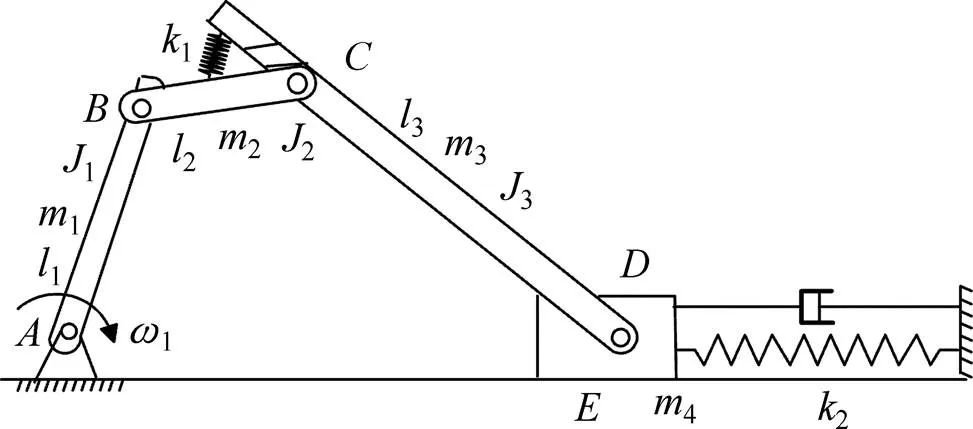
图1 约束变胞机构简图
为了方便分析,将机构变胞前后的构态分别称为机构的第一构态和第二构态。取图2(a)所示位置为初始位置,此时,机构处于第一构态,机构等效于曲柄滑块机构;当滑块运动到图2(b)所示的位置时,滑块处于约束状态,变胞副运动;在图2(c)位置时,机构处于第二构态,变胞副受到的实际力大于弹簧力,机构相当于一个铰链四杆机构;在图2(d)所示位置时,变胞副保持相对静止,当曲柄继续转动时,滑块开始运动,机构进入第一构态,如图2(e)所示。
而北岩火山群,位于乔官镇郝家沟西北坡,为全国古火山群中唯一集中的地区,群体规模大,具有完整性和典型性,是不可再生的地质遗产。从一座座气势恢弘、形态各异的火山口断面明显看出,这里的火山喷发纹理特别清晰,整体形象尤为壮观。有的像蓄势待发、锐不可挡的火箭,有的似万把直刺青天的利剑,有的像被特意排放的井然有序的礼炮,有的又如竖排成行的一册册线装古书。特别中间一座显示了火山熔岩两次喷溢的奇特景观,第一次右面喷溢的岩浆形成的扇形柱状节理,被左面第二次喷溢岩浆形成的垂直柱状节理明显切断。据专家考证,这一先斜喷后直喷,两次不同熔岩喷发相互交切的景观,实属天下奇观,目前全国仅在此处发现。
2 约束变胞机构的随机性分析
三区道路区域采用塑料排水板施工,待回填至设计场平标高11.8m后继续堆载2m,从而达到预压排水的目的。排水板施工安排在铺设级配砂砾垫层后、铺设土工格栅及土工布之前进行。施工中做好定位放线工作,科学布置行进路线,并严格控制打设间距和深度。
为了求解变胞机构对应的约束变胞副的约束力的变化规律,需要了解与其匹配的约束变胞副的类型及约束形式,因此,可以建立变胞运动副的阻力梯度 模型[15]。
文献[11]提到,约束变胞机构的运动过程中,每一个相对运动的变胞副都会对应一个工作构态,其余的变胞副均保持相对静止,根据变胞副提供的约束力实现了变胞副在运动与静止之间的切换。为了描述变胞副的受力情况和约束特点,并使同一机构中转动变胞副所受的约束力矩和移动变胞副所受的约束力能够进行比较,定义了量纲一的变胞运动副的等效阻力系数函数,即:
[3] PARISE J J, HOWELL L L, MAGLEBY S P. Ortho-Planar linear-motion spring[J]. Mechanism and Machine Theory, 2001, 36(12): 1281−1299.
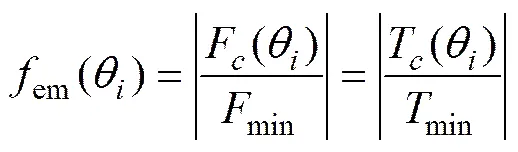
(2)
式中:em()为相对运动变胞副的等效阻力系数函数;es()为相对静止变胞副的等效阻力系数函数;min为变胞副最小受力;min为变胞副最小受力矩;max为变胞副最大受力;max为变胞副最大受力矩。
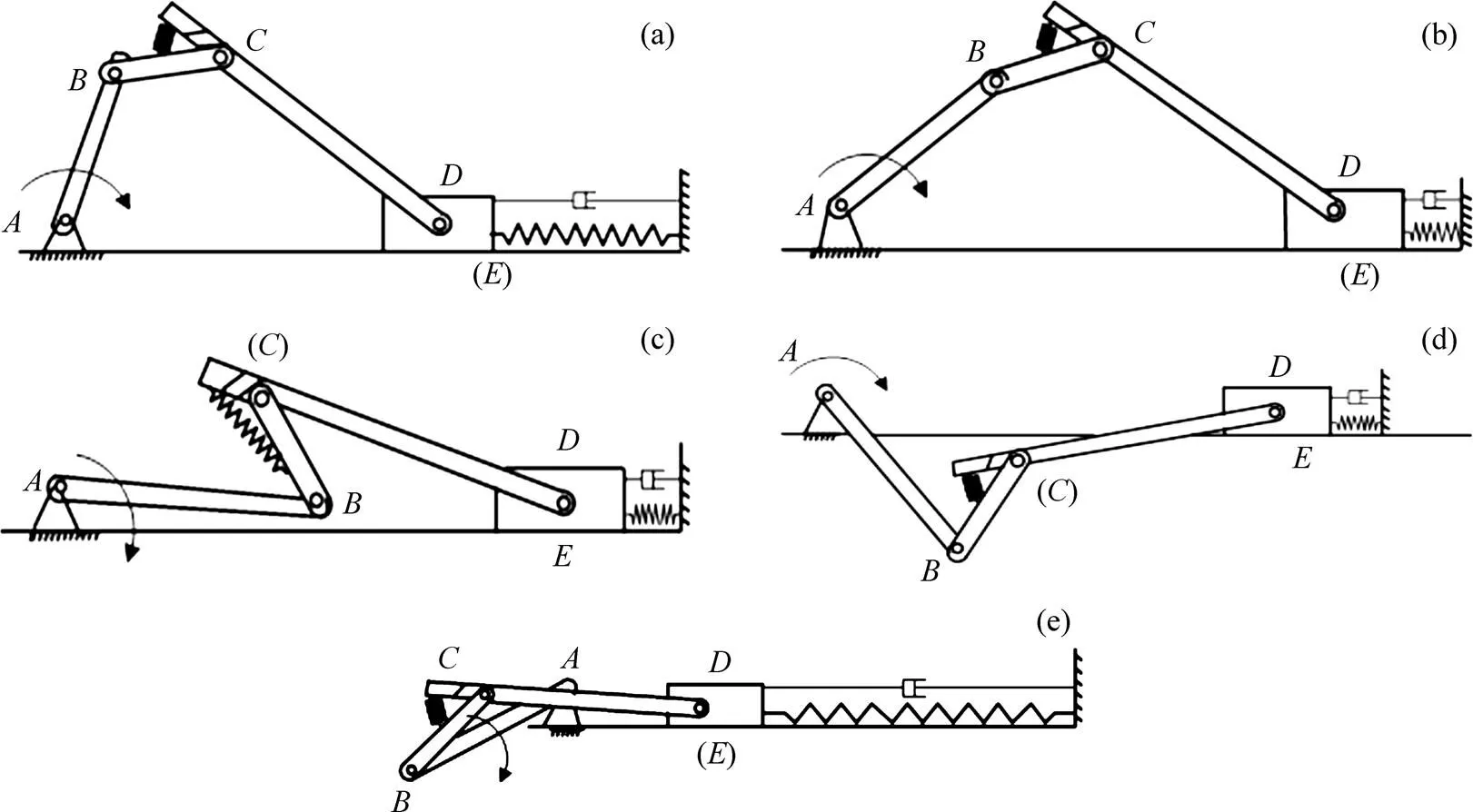
(a) 第一构态;(b) 构态改变;(c) 第二构态;(d) 构态改变;(e) 再次进入第一构态
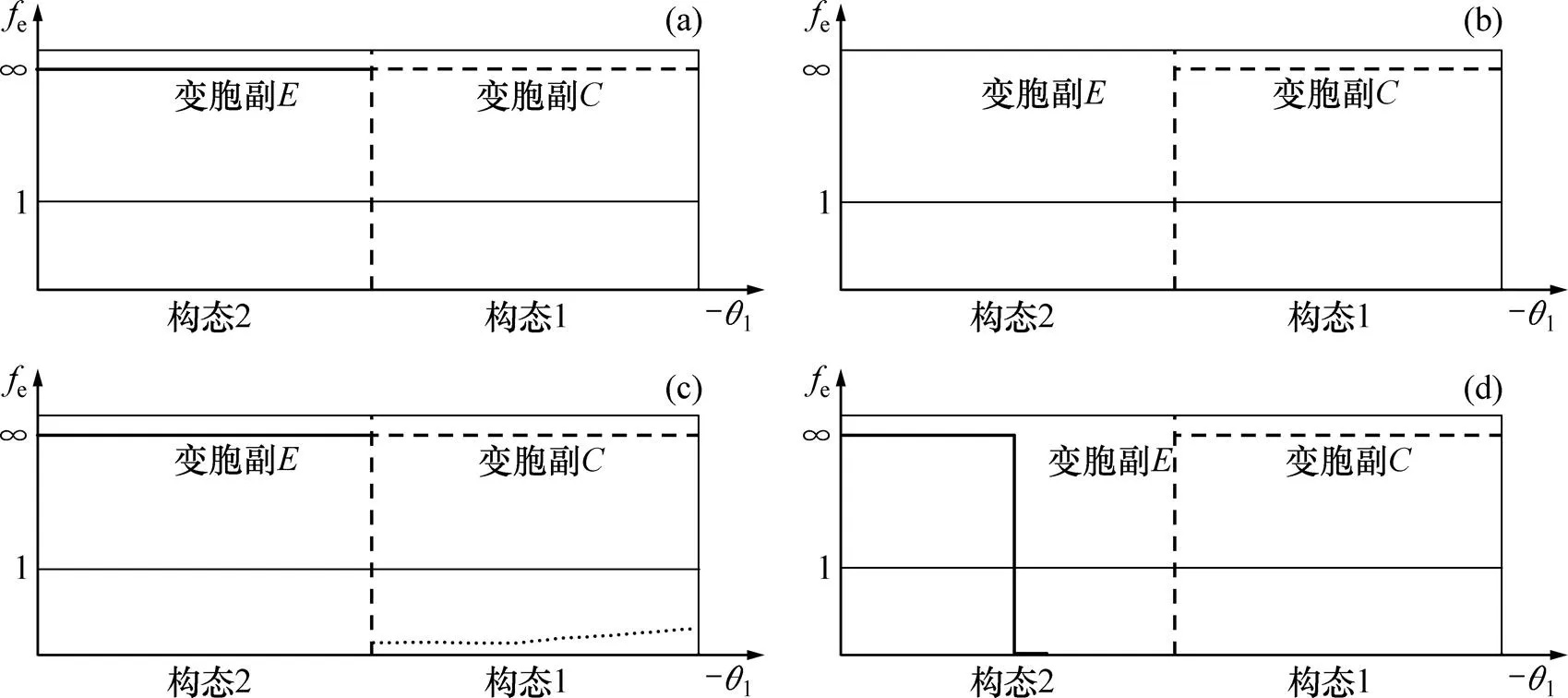
根据最小阻力原则,变胞副的动作顺序和等效阻力系数紧密相关,若要使静止变胞副的等效阻力系数大于相对运动变胞副的等效阻力系数,则等效阻力梯度的变化规律为
em()≤1,es()≥1 (3)
根据式(3),等效阻力梯度曲线如图3所示。
2.1 等效阻力梯度模型
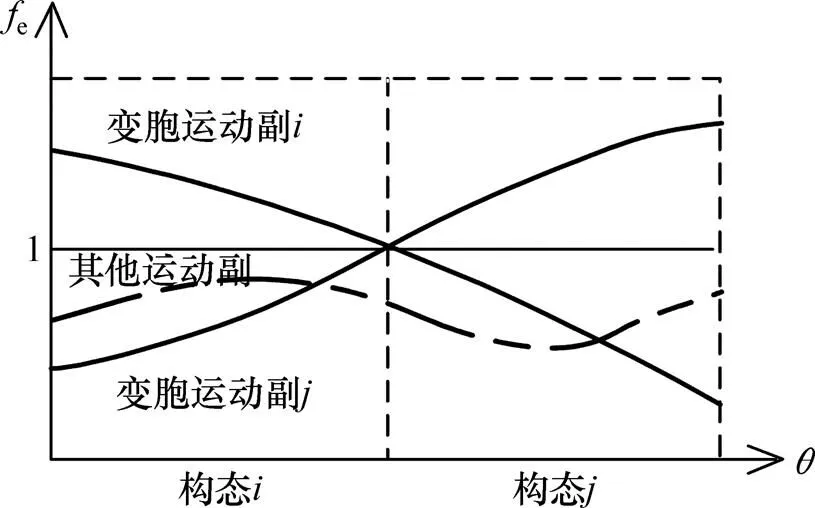
图3 等效阻力系数曲线
2.2 构态转换过程分析
3.5 改变阻尼系数时的等效阻力梯度分析
为了获得机构的初始位置参数,利用牛顿−辛普森方程,得到转动变胞副的约束角=92.8°,第一构态与第二构态切换位置处的角位移为1=66.9°,2=59.6°,第一构态与第二构态切换位置处的角位移为1=293.3°,2=102.3°。因此,1=66.9°~66.7°为第二构态区间,1=−66.7°~293.1°为第一构态区间,同时对约束变胞机构进行动态静力分析。
第六,鼓励国有资本入股非国有企业。在公共服务、高新技术、生态环境保护和战略性产业等重点领域,以市场选择为前提,鼓励具有资本运作经验的国有企业、国有资本投资公司对发展潜力大、成长性强的非国有企业进行股权投资。鼓励国有企业按照产业链、价值链要求,通过投资入股、联合投资、重组等多种方式,与业务相同或关联度高的非国有企业进行股权融合、战略合作、资源整合。
等效系数函数的公式为

当机构处于第一构态时,只需要判断变胞副是否变胞即可判断机构运动过程是否会产生随机构态。因此当Δ>0时有
(5)
不过,仅仅把礼看作是对社会生产和分配进行组织的原则和制度的看法,肯定是不完善的。《左传》昭二十五年材料提出“六志生于六气”“审则宜类,以制六志”,表明礼的活动不仅要面对人的食色之欲,而且必须处理“欲”所必然引发的“情”的活动;“情”能否得到恰当的处理是“礼”能否发挥良好作用的关键所在。如《礼论》云:
当机构处于第二构态时,只需要判断变胞副是否变胞即可判断机构运动过程是否会产生随机构态。因此当4<|F2|时,机构有向左的运动趋势时,弹簧力在运动方向提供的力不再是约束力,因此有
则此时机构中两变胞副同时发生变胞,机构出现随机构态。当4>|F2|时,机构有向右的运动趋势,几何约束提供无穷大的约束力,则e()=∞,变胞副处于约束状态,构态稳定。
3 不同参数对随机构态的影响
[1] DAI J S. Conceptual study of the Dexterous Reconfigurable Assembly and Packaging System[R]. Bedford: Science and Technology Report, 1996.
选取机构参数如下:1=60 mm,2=30 mm,3=150 mm,4=0.2 kg,=15 mm,=15 mm,=25 mm,=185 mm,1=30 N/mm,2=1 N/mm,=9.8 N/m2,无外力和外力矩作用。对主动构件转速1分别取20,50和80 rad/s,观察等效系数函数曲线,如图4所示。从图4可见:当1=20 rad/s时,变胞副在第一构态时为约束状态,变胞副在第二构态时也为约束状态。机构在运动过程中没有出现随机构态。当1=50 rad/s时,变胞副在第一构态保持时出现随机构态,变胞副在第二构态时一直处于约束状态。当主动件转速1=80 rad/s时,机构在=0.034 s进行构态变换时出现随机构态,在=0.070 s的构态保持过程中也出现了随机构态;变胞副在=0.01 s时出现随机构态,之后变为约束状态。由此可以得出,主动件转速对第一构态和第二构态均会产生比较大的影响,转速越大,变胞机构在运动过程中越容易出现随机构态。
将分离纯化后的菌株接种到对应产蛋白酶筛选培养基中,36 ℃培养48 h后观察菌株周围是否有蛋白酶水解圈,若有,即判定该菌株具有产蛋白酶活性。
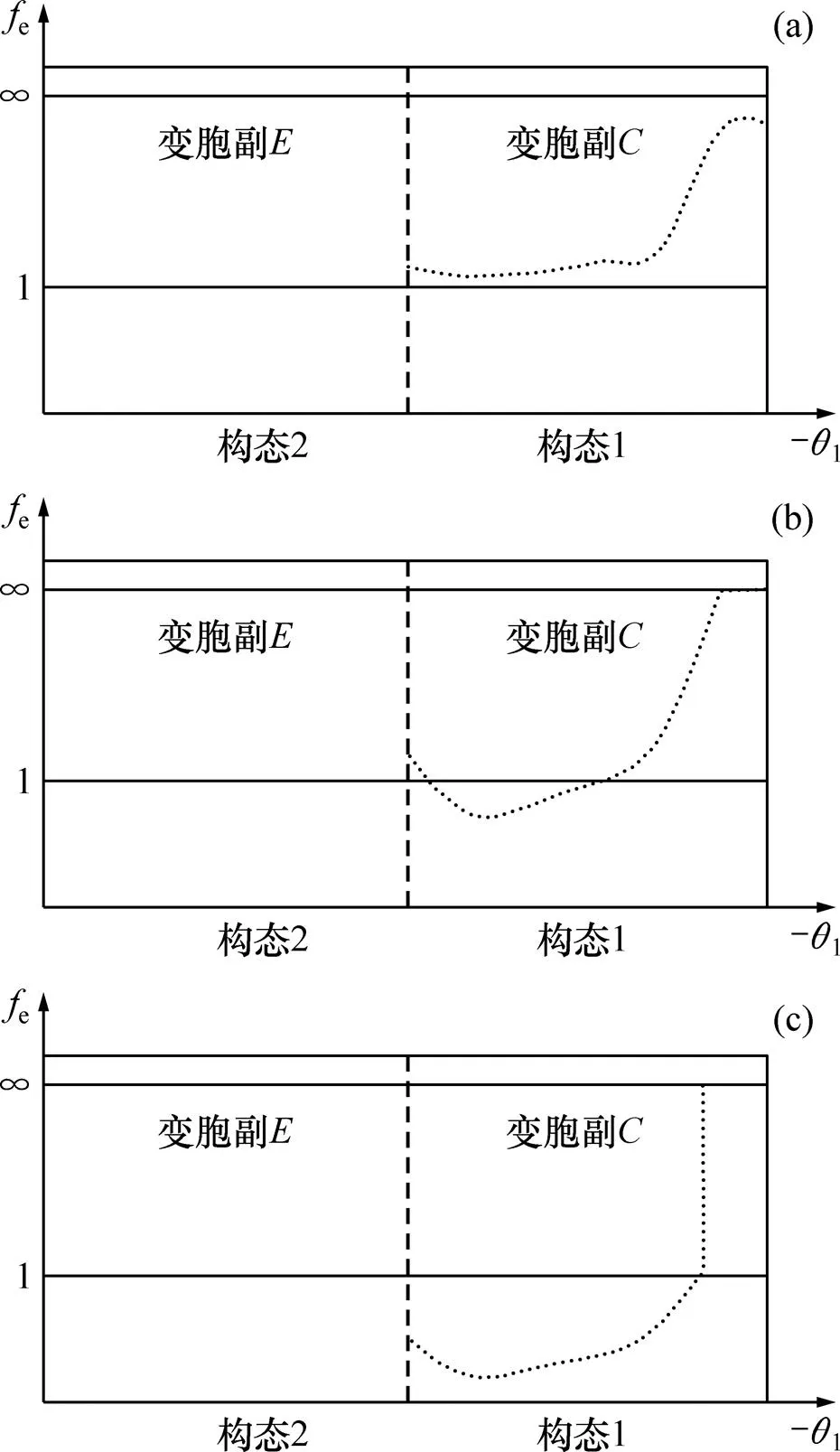
ω1/(rad∙s):(a) 20;(b) 50;(c) 80
3.2 弹簧刚度系数的影响
因为气候变化、人口增加、劳动力减少和食品安全等因素,促使农业寻求更多创新措施来保护和提高农作物产量。目前主流的大棚控制方法是采用农业物联网技术对温室大棚进行智能控制,通过智能传感器对大棚内环境数据进行采集,然后专家系统根据大棚内的环境状况提供控制设备的下一步动作[1]。由于专家系统是根据种植专家的经验来设定的,不能根据实际情况做出实时决策,从长远来看不利于植物的生长。
对弹簧的刚度系数1和2取不同值时观察等效系数函数曲线如图5所示。对比分析可知,当仅减小弹簧1的刚度系数1时,机构在第一构态保持过程中一直处于约束状态,在第二构态的变换和保持过程中均出现随机构态;当减小弹簧1的刚度系数1,增大弹簧2的刚度系数2时,机构在第一构态保持过程中一直处于约束状态,在第二构态的变换和保持过程中均出现随机构态,对第一构态和第二构态均有较大的 影响。
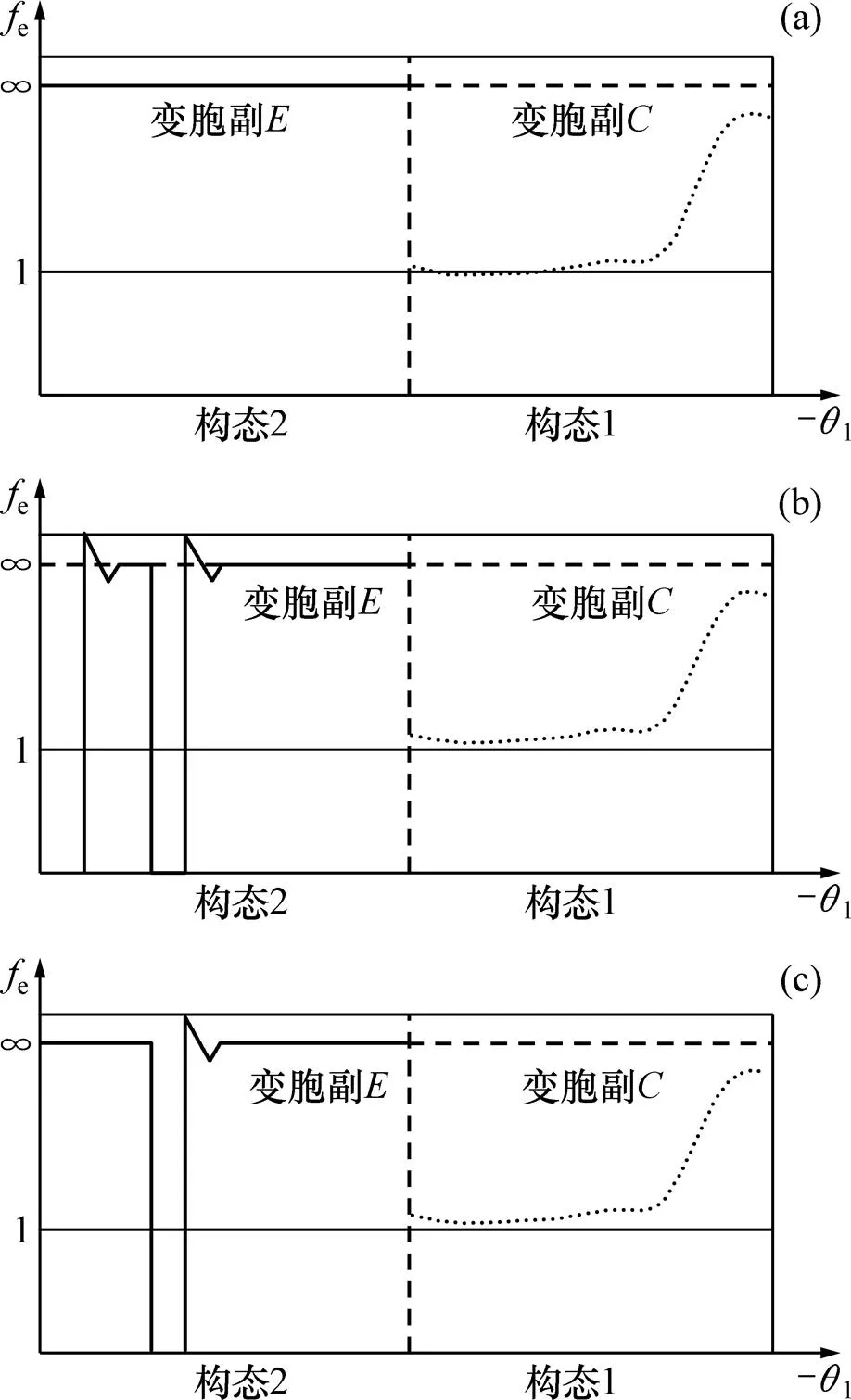
(a) k1=10 N/mm,k2=1 N/mm;(b) k1=30 N/mm,k2=10 N/mm;(c) k1=20 N/mm,k2=10 N/mm
3.3 外力作用的影响
当e()>1时,变胞副处于约束状态;当e()<1时,变胞副发生变胞,机构出现随机构态。当Δ>0时,机构受几何约束的作用,约束力矩为无穷大,此时e()=∞,转动变胞副处于约束状态,构态稳定。
其他几何参数与前文的参数相同,外力作用点为所在构件的质心,对构件质心处施加不同的外力时观察等效系数函数曲线,如图6所示。由对比分析可知,当构件受到向下的干扰力时,对机构的第一构态影响较大,易出现随机构态;当构件受到向上的干扰力时,机构在第二构态保持过程中易出现随机构态。
3.4 有外力矩作用时的等效阻力梯度分析
主动件转速1=20 rad/s,其他几何参数与前文的参数相同。在构件上施加不同的外力矩时,观察等效系数函数曲线,如图7所示。在构件上施加力矩=2 N·m时,变胞副在第一构态的构态保持过程中出现随机构态,变胞副一直处于约束状态。在构件上施加力矩=−2 N·m时,机构在第一构态和第二构态的构态变换和保持过程中均处于约束状态。在构件上施加力矩=4 N·m时,机构在第一构态的构态变换和构态保持过程中均出现随机构态,变胞副一直处于约束状态。在构件上施加力矩=−4 N·m时,变胞副在第一构态的构态保持过程中一直处于约束状态,机构在第二构态的保持过程中出现随机构态。对比分析可知,无论构件上受到顺时针转矩干扰还是逆时针转矩干扰,对机构运动都有较大影响,在第一构态和第二构态的变换和保持过程中易使机构出现随机构态。
为了克服传统阈值去噪方法的缺点,文献[11]中提出一种基于能量元的浮动阈值小波去噪方法,在利用该方法对微流控芯片信号去噪过程中,虽然具有一定的去噪效果,但去噪后的信号存在毛刺或抖动现象。因此,本文在文献[11]中提出的能量元方法的基础上,提出一种基于改进能量元阈值函数的微流控芯片信号去噪方法。通过实验对比,本文对微流控芯片信号的去噪方法能有效消除信号的毛刺和抖动,效果更优。
阻尼元件(或阻尼器)对于外力作用的影响,表现为其端点的一定的速度。与运动速度成正比的阻尼称为黏性阻尼,对于黏性阻尼,d是速度的线性函数,即,阻尼系数是阻尼器产生单位速度所需要施加的力。不同阻尼系数的等效系数函数曲线如图8所示。
在实际的工程应用中,状态方程、量测方程并非都是非线性的。例如导航领域中,量测方程是线性的;目标跟踪应用领域中,其状态方程是线性的。此时,针对线性的模型方程,常规线性Kalman滤波算法理论上是最小均方准则最优的,因此可以直接用线性Kalman滤波进行运算[9]。
对比分析可知,阻尼系数的变化对机构在第一构态和第二构态的变换和保持过程中的运动的影响 较小。
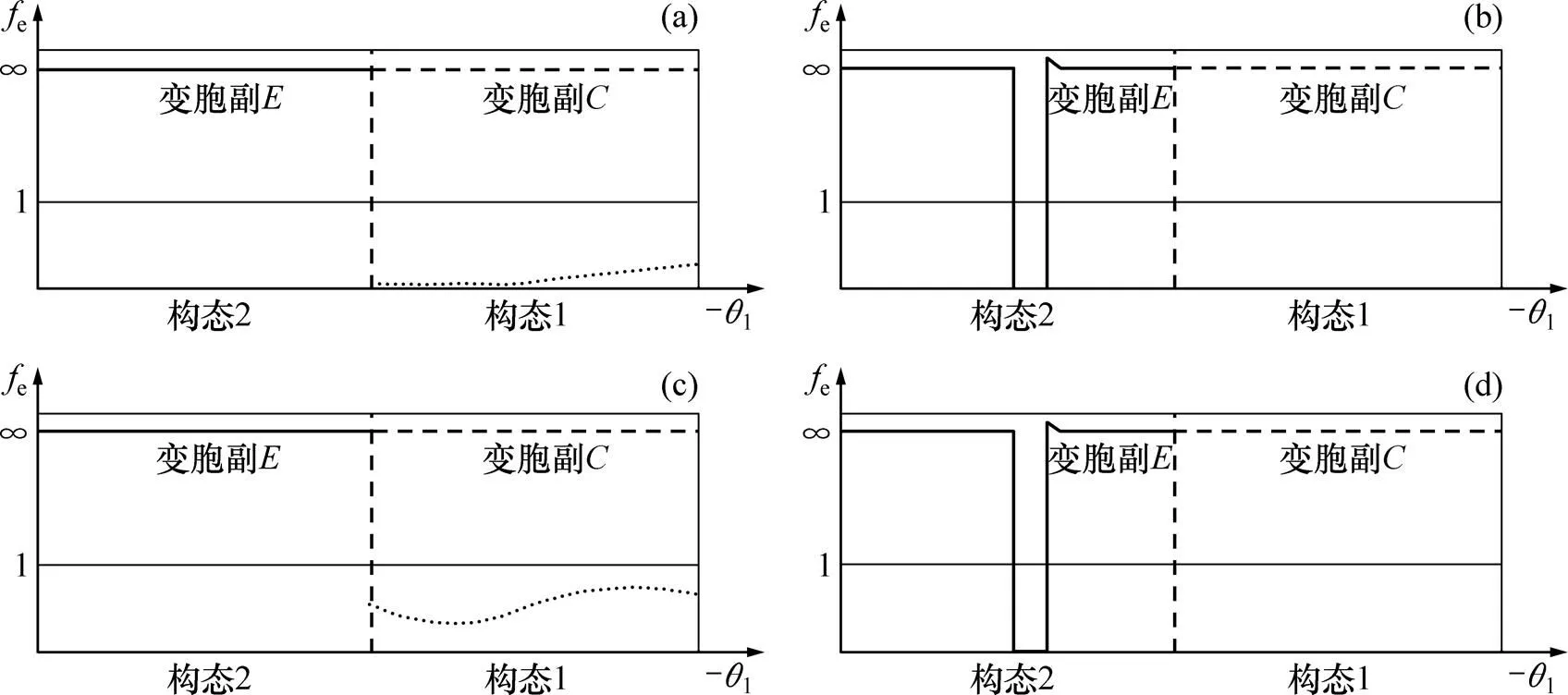
(a) F=100 N,竖直向下;(b) F=100 N,竖直向上;(c) F=50 N,竖直向下;(d) F=50 N,竖直向上
M/(N∙m−1):(a) 2;(b) −2;(c) 4;(d) −4

c:(a) 0.003;(b) 0.01;(c) 0.03
4 结论
1) 主动件转速对第一构态和第二构态均会产生比较大的影响,转速越大,变胞机构在运动过程中越容易出现随机构态。
2) 当仅减小弹簧1的刚度系数1时,机构在第一构态保持过程中一直处于约束状态,在第二构态的变换和保持过程中均出现随机构态;当减小弹簧1的刚度系数1,增大弹簧2的刚度系数2时,机构在第一构态保持过程中一直处于约束状态,在第二构态的变换和保持过程中均出现随机构态,对第一构态和第二构态均有较大的影响。
3) 当构件受到向下的干扰力时,对机构的第一构态影响较大,易出现随机构态;当构件受到向上的干扰力时,机构在第二构态的保持过程中易出现随机构态。无论构件上受到顺时针转矩干扰还是逆时针转矩干扰,对机构运动都有较大影响,在第一构态和第二构态的变换和保持过程中易使机构出现随机构态。阻尼系数的变化对机构在第一构态和第二构态的变换和保持过程中的运动的影响较小。
3.1 主动件转速的影响
[2] DAI J S, REES J J. Configuration transformations in metamorphic mechanisms of foldable/erectable kinds[C]//Proc of 10th World Congress on the Theory of Machines and Mechanisms. Oulu: University of Oulu, 1999: 542−547.
干旱是在全球气候变化和人类活动双重驱动下,水资源—经济社会—生态与环境复杂系统极值缺水过程在不同时空尺度上的综合体现。按受旱机制分类,干旱分为:气象干旱、水文干旱、农业干旱和经济社会干旱。按受旱成因分类,干旱分为:资源型干旱,即干旱区降水量稀少,土壤缺水,不足以满足人的生存和经济发展的需求;工程型干旱,即缺少水利工程的开发调度;政策型干旱,即非理性的水资源分配;结构型干旱,即水质水量达不到用水要求;布局型干旱,即追求经济社会快速发展情势下的水土资源不匹配;管理型干旱,即水资源得不到高效利用和有效调配,缺少全局可靠规划与应对策略;复合型干旱,即多种因素综合作用下的干旱。
[4] DAI J S, ZHANG Q X. Metamorphic mechanisms and their configuration models[J]. Chinese Journal of Mechanical Engineering, 2000, 13(3): 212−218.
[5] YAN H S, KUO C H. Topological representations and characteristics of variable kinematic joints[J]. Transactions of the ASME, Journal of Mechanical Design, 2006, 128(2): 384−391.
[6] 李端玲, 戴建生, 张启先, 等. 基于构态变换的变胞机构结构综合[J]. 机械工程学报, 2002, 38(7): 12−16.LI Duanling, DAI Jiansheng, ZHANG Qixian, et al. Structure synthesis of metamorphic mechanisms based on the configuration transformations[J]. Chinese Journal of Mechanical Engineering, 2002, 38(7): 12−16.
[7] CHEN Y M, LI H S, CATHALA A. Mechatronic design and locomotion of Amoebot: a metamorphic under water vehicle[J]. Journal of Robotic Systems, 2003, 20(6): 307−314.
[8] DAI J S, REES J J. Matrix representation of topological changes in metamorphic mechanisms[J]. Transactions of ASME,Journal of Mechanical Design, 2005, 127(4): 837−840.
[9] LI Duanling, ZHANG Zhonghai, DAI Jiansheng, et al. Configuration based improved synthesis of metamorphic mechanisms[C]//Proceedings of the ASME 2009 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE 2009), 33rd Mechanisms and Robotics Conference (MECH).San Diego: ASME, 2009: 1−10.
[10] 李树军, 戴建生. 基于扩展Assur杆组的变胞机构组成原理[J]. 机械工程学报, 2010, 46(13): 22−30. LI Shujun, DAI Jiansheng. Structure of metamorphic mechanisms based on augmented assur groups[J]. Chinese Journal of Mechanical Engineering, 2010, 46(13): 22−30.
[11] 李树军, 王洪光, 戴建生. 变胞机构的等效阻力梯度模型及其设计方法[J]. 机械工程学报, 2014, 50(1): 18−23. LI Shujun, WANG Hongguang, DAI Jiansheng. The equivalent resistance gradient model of metamorphic mechanisms and the design method[J]. Chinese Journal of Mechanical Engineering, 2014, 50(1): 18−23.
在市场经济体制改革的背景下,企业的经营发展受多方面的因素影响,包括国家的宏观调控、市场政策、社会需求变化、人们消费水平以及法律法规等外部环境因素。企业无法对这些外界因素的复杂性和多变性进行预测和改变,如果企业的发展偏离外界环境变幻趋势,那么企业可能面临严重的财务风险。
[12] 张武翔, 丁希仑, 戴建生. 基于约束变化特征分析的变胞机构构型综合方法[J]. 机械工程学报, 2013, 49(5): 1−8. ZHANG Wuxiang, DING Xilun, DAI Jiansheng. Method for configuration synthesis of metamorphic mechanisms based on constraint variation[J]. Chinese Journal of Mechanical Engineering, 2013, 49(5): 1−8.
[13] 畅博彦, 金国光, 戴建生. 基于变约束旋量原理的变胞机构构型综合[J]. 机械工程学报, 2014, 50(5): 17−25. CHANG Boyan, JIN Guoguang, DAI Jiansheng. Type synthesis of metamorphic mechanism based on variable constraint screw theory[J]. Chinese Journal of Mechanical Engineering, 2014, 50(5): 17−15.
[14] MASSA B, ROCCELLA S, CARROZZA M C, et al. Design and development of an underactuated prosthetic hand[C]// Proceedings of the ICRA. Washington: IEEE, 2002: 3374−3397.
高中政治的有效教学是新时代的要求,高中政治教师要重视课堂的有效性,积极探索创新适合现代政治教学的方法,将政治课堂生活化,采取有效的教学手段,不断提高实际教学的效果,提高政治学习积极性,使学生得到全方面的发展,形成正确的思想观念。高中政治是高中学科中重要的一部分,对学生的个体发展具有重要的影响。教师要不断地开放教学思维,提高政治的教学效果,使政治能够真正为学生的发展添动力。
[15] 徐亮. 约束变胞机构等效阻力梯度分析方法[D]. 沈阳: 东北大学机械工程与自动化学院, 2012: 19−21. XU Liang. The equivalent resistance gradient analysis method of constraint metamorphic mechanism[D]. Shenyang: Northeastern University. School of Mechanical Engineering and Automation, 2012: 19−21.
(编辑 赵俊)
Effect of parameters variation on random working configurations of constraints metamorphic mechanism
LI Xiaopeng, GAO Jianzhuo, LI Jiasheng, LI Shujun
(School of Mechanical Engineering & Automation, Northeastern University, Shenyang 110819, China)
In order to study the change of factors affecting the motion of the equivalent resistance gradient model in the process of the motion of the metamorphic mechanism, the random working configurations of the constraints metamorphic mechanism were analyzed based on equivalent resistance gradient. The results show that the influence of the active speed, two spring stiffness coefficient, force, torque and damping coefficient on the randomness of the constraints metamorphic mechanism is weakened gradually.
metamorphic mechanism; constrained metamorphic process; random working configurations; equivalent resistance gradient
10.11817/j.issn.1672−7207.2017.06.012
TH112
A
1672−7207(2017)06−1499−06
2016−07−29;
2016−10−21
国家自然科学基金资助项目(51275079,51575091);辽宁省百千万人才工程培养经费资助项目(2014921018)(Projects(51275079, 51575091) supported by the National Natural Science Foundation of China; Project(2014921018) supported by Liaoning BaiQianWan Talents Program)
李小彭,博士,教授,博士生导师,从事机械动力学、振动与摩擦耦合研究;E-mail:xpli@me.neu.edu.cn
