致命性自主武器系统的定义方法
2017-07-21曹华阳况晓辉
曹华阳, 况晓辉, 李 响, 赵 刚
(北京系统工程研究所 信息系统安全技术重点实验室, 北京 100101)
致命性自主武器系统的定义方法
曹华阳, 况晓辉, 李 响, 赵 刚
(北京系统工程研究所 信息系统安全技术重点实验室, 北京 100101)
致命性自主武器系统引发国际社会军控问题讨论,但对于致命性自主武器系统的定义这一核心问题,国际社会难以形成统一认识。针对目前缺乏关于致命性自主武器系统统一定义方法的问题,报告了当前国际上关于致命性自主武器系统的认识现状,进行了定义方法调查,提出了情境和关键特征相结合的致命性自主武器系统定义框架。基于该框架,可从关键特征、应用场景、作战中发挥的作用3个维度对致命性自主武器系统的概念进行界定,并可对已有定义进行分析。
自主性武器;智能武器;自动化武器;无人武器;定义框架
随着信息技术的快速发展和世界新军事革命的逐步深入,信息系统的智能化和武器装备的无人化趋势凸显,各信息大国竞相制定发展战略,发展相关装备技术,积极谋求智能化无人作战领域的优势和主动权,这一趋势引发国际社会的高度关注。2012年,人权观察组织发表《失去人性:反对杀人机器人》的报告,呼吁世界各国政府禁止全自主武器系统[1]。随后,红十字国际委员会(International Committee of the Red Cross,ICRC)组织发表文章呼吁对此类武器系统进行关注[2]。在此背景下,联合国特定常规武器公约(Convention on Certain Conventional Weapons,CCW)缔约国自2014年起,以非正式专家会议形式专门讨论致命性自主武器系统(Lethal Autonomous Weapons Systems,LAWS)问题。2016年的非正式专家会议是在CCW框架下就LAWS问题举行的第三次会议,重点针对LAWS的定义、人道主义法面临的挑战以及对国际安全的影响等问题进行研讨。其中LAWS的定义问题旨在界定讨论对象的范畴,是其他问题的基础,已成为LAWS相关讨论中的核心问题,并被确定为联合国CCW下一届会议关于LAWS问题讨论的主要内容之一。
智能化和无人化是当前装备技术发展的重要趋势,智能化无人作战武器的军备控制问题,尤其是LAWS相关问题已成为摆在国际社会面前的重大现实问题。但是目前国际社会对LAWS定义的认识仍未统一,且各方对定义的制定也没有统一的方法和参考标准,这已经严重阻碍了国际社会对相关问题的研讨和相关草案的制定。
本文梳理了现有定义方案和定义方法,分析了LAWS定义中涉及的关键特征,并提出了情境和关键特征相结合的LAWS定义框架。该框架涵盖现有定义,具有良好的扩展性,可为推动LAWS问题的国际研讨提供参考借鉴。
1 国际社会对LAWS定义的认识
1.1 目前已提出的LAWS定义
美国在无人作战领域走在前列,并就自主武器系统的定义发布了专门文件。在美国国防部2012年11月发布的编号为DoDD 3000.09的指导文件《Autonomy in Weapons Systems》[3]13中,将自主武器系统定义为:“一旦激活,便能够在没有人员进一步操作的情况下,自主选择目标并与之交战的武器系统”。同时,这份文件还提出了另外2个相关的概念:有人监督的自主武器系统和半自主武器系统。前者是指“在武器系统发生故障、造成严重损失之前,允许人类干预和解除其功能的自主武器系统”,后者是指“一旦激活,便能够与人类选择的特定目标或者目标群进行交战的武器系统”。从联合国CCW会议的公开文件来看,与美国观点类似,英国代表认为LAWS是一种机器人武器系统,它能够在机器控制下(而不是人类控制下)识别、选择人类作为目标并实施武力攻击[4]。
此外,一些国家代表则从LAWS本身的功能方面进行界定,如在CCW会议上,法国代表认为,LAWS应当具备自由行动的能力,适应环境的能力,达成目标的能力和产生致命性效果的能力。LAWS应具有完全的自主功能性,而当前的自动化武器并不能归类于LAWS[5]。与之类似,日本代表认为,LAWS需要在无人为干预的情况下实现自主部署和修复、识别目标、攻击决策、对目标实施致命性武力攻击(特别是对人类目标)[6]。
还有国家进一步认为,对LAWS概念的讨论还应包括更一般意义的自主武器系统(Autonomous Weapons Systems,AWS)。如加拿大代表认为,当机器人系统能够有效应对环境复杂性(如空间、植被、地形)、任务复杂性(如识别敌我、克服困难达成目标)、机械控制(如控制机械足、电机、机械鳍)等问题时,就可以说该系统在执行特定任务下具备自主性[7]。瑞士则从法律的角度给出了定义[8]:AWS是一种能够在国际人道法(International Humanitarian Law,IHL)的规定范围内部分或全部地替代人类执行武装行动的武器系统,特别是在目标选择方面。
可以看到,在CCW会议上,以美国等国家为代表的技术先进国家认为LAWS是一种未来的武器系统,但一些中小发展中国家则持不同观点。如塞拉利昂认为LAWS并不一定是未来的系统,当前武器系统增加自动化能力就可以具备自主性,考虑到被滥用的风险,不应当发展这类武器系统[9]。巴基斯坦、哥斯达黎加认为LAWS是缺乏人类干涉,并且可以决定人类生死的武器系统,由于武器系统缺乏同情和直觉的能力,且可能引起军备竞赛,应当禁止发展LAWS[10-11]。
与之相对的,以色列、土耳其代表则认为,LAWS相关问题应以给出LAWS明确定义为基础,且当前LAWS尚未出现,不支持预防性禁止LAWS[12-13]。
除了各国代表,联合国CCW会议也邀请了国际组织参与讨论。红十字国际委员会在正式文件中,将LAWS定义为任何在关键功能方面具备自主性的武器系统,即不需要人类干预而能够选择(搜索、探测、识别、追踪、选择)和攻击(如使用武力打击、抵消、破坏或毁灭)目标的武器系统[14]。Article 36是一个位于英国的非营利组织,该组织给出的LAWS定义为:不需要行使有意义的人类控制(meaningful human control)而能够自行工作的武器系统[15]4。类似地,人权观察组织将LAWS定义为:作为一种未来的武器系统,一旦启动,能够借助传感器和人工智能,无须人类控制可以在每次攻击行动中自行选择目标并做出致命攻击决定[16]。
1.2 对定义现状的分析
总的来看,当前国际社会对于LAWS的定义尚未形成明确而统一的认识。大部分中小发展中国家并未给出明确的LAWS定义,但倾向于认为LAWS无法遵守国际人道主义法的区分原则、比例原则和必要性原则,呼吁禁止发展和使用LAWS。美、英、以色列等技术先进的国家倾向于认为LAWS是未来的武器系统,当前的智能化无人装备依赖有意义的人的控制或人的判断功能,能够遵守国际人道主义法,不应受到限制。
各国间存在分歧的根本原因在于各自的国家利益。智能化、无人化装备已经在现代军事行动中展现出特有的优势,技术先进的国家不希望其自主武器系统相关装备技术发展受到限制,因而倾向于将LAWS限定为未来的武器系统,从而避免现有无人装备受到军备控制,比如美国强调了其现有无人装备属于自动化武器而非自主性武器,因此这些武器不会受到DoDD 3000.09的制约和限制;而自主武器系统技术门槛高、经费投入大,广大中小发展中国家难以超越,为避免在未来战争中陷入有人装备对抗无人系统的不利局面,期望将LAWS的范畴扩大,并通过限制性条款制约此类武器的部署和应用,古巴等国更是在LAWS定义尚未明确的情况下就要求禁止LAWS[17]。
由此可见,当前关于LAWS相关问题的讨论不可避免地会涉及LAWS的定义问题,为了推动LAWS相关问题的讨论和国际草案的制定,亟须各国之间对LAWS的定义形成统一认识。但目前各国对LAWS的定义缺乏统一的定义方法,各国采用各自习惯方式给出的定义之间难以形成比较和对应关系,不利于各方基于其开展研究和讨论,导致CCW会议已召开三届,仍未就LAWS的定义达成共识。
2 LAWS的定义方法研究
关于致命性自主武器系统的概念,我国尚未见明确定义。本文通过研究常用地给出定义的方式,提出了界定LAWS概念的多维定义框架这一定义方法,并探讨了与LAWS相关的情境和关键特征。
2.1 定义方式
对于不同的概念,其适用的定义方式也不同。对于LAWS的定义,首先需要确定合适的定义方式。参考维基百科关于定义的总结[18],采用文字对概念进行定义的方式,常见有如下几种:
1) 词法定义:提供一个与原词相当的表达来描述一个词或者一个表达的意义。比如“胜利”可以定义为“在斗争或竞赛中打败对方”。
2) 情境定义:也称上下文定义。有些词无法清晰地定义,但可以通过使用一个不出现这个词的句子来解释这个词在上下文的意义。比如“黑客”可以定义为“未经授权进入一个计算机的存储系统的人”。
3) 内涵定义:将一个物件与其他物件之间不同的所有特征列举出来。比如“口径小于6 mm的子弹”是一个特定集合的内涵定义。
4) 外延定义:描述一个概念或者词的外延,即所有这个概念或者词所包含的事物。比如“国家”的外延定义是指古今中外一切国家。
5) 列举定义:是一种外延定义的方式,它列出一个概念或者词所描写的所有的物件。比如《孙子·地形篇》列举定义“地形”为“通,挂,支,隘,险,远”。
6) 理论定义:使用一个学科的理论对一个词作一个定义,比如“千克”的最初定义为“4摄氏度时1立方分米纯水的质量”。
7) 递归定义:又称归纳定义,它是使用有意义的方式用一个词来定义这个词本身。比如以下为自然数的递归定义:“1是一个自然数,比自然数大1的数也是自然数,所有其他数都不是自然数”。
8) 循环定义:比如“祖父是父亲的父亲,父亲是祖父的儿子”就是一个循环定义。循环定义需要假设别人已经对被定义项有一定的了解。
由于LAWS及其相关技术还在发展过程中,缺乏成熟理论和技术支撑,循环定义、递归定义、理论定义、词法定义方法显然不适合用于定义LAWS。外延定义、列举定义也不适合LAWS这类非有限集合的事物。
目前,LAWS较可行的定义方式包括情境定义和内涵定义。其中,情境定义方式需给出LAWS的使用场景以及作用,内涵定义则需要给出LAWS区别于其他事物的特征。
2.2 定义框架
相比其他军事装备只是被作为武器使用,LAWS由于具备了自主性,从而兼具“武器”和“战斗员”这2个原本独立的属性,使得仅采用情境描述或者仅采用内涵特征的方法都不能准确定义LAWS这一概念。我们结合情境定义和内涵定义方式,提出采用情境和关键特征相结合的框架方式作为LAWS的定义方法。框架具体包括关键特征、作战功能和应用场景3个维度,其中后面2个维度体现了情境定义这一方式。LAWS定义框架如图1所示。
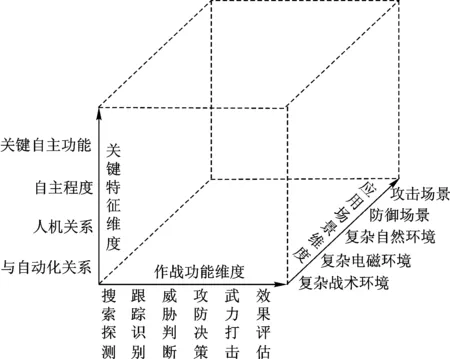
图1 LAWS定义框架
从图1可以看到,LAWS的应用场景涵盖了攻击、防御场景,以及自然、电磁、战术环境,需要说明的是,以上两者之间可以存在交叉,这里进行一定简化,将它们放入一个维度考虑。一些国家认为,在攻击和防御场景下,LAWS所能行使的作战手段和作战目标应有所区分,如美国认为,实施攻击的LAWS应当以电子干扰等方式作为攻击手段,或者仅以物体为目标进行打击,而实施防御的LAWS则可以对车辆等目标进行致命打击[3]3。而自然、电磁、战术环境则涵盖了LAWS活动环境中可能需要应对的有形世界、无形世界、与其他系统/人类的交互世界。
定义框架中的作战功能维度则包括了搜索探测、跟踪识别、威胁判断、攻防决策、武力打击、效果评估。这一维度基本涵盖了一次战斗的完整步骤,其中搜索、探测、跟踪、评估等属于非致命性的自主功能,而威胁判断、攻防决策、武力打击等属于致命性的自主功能,LAWS具备哪些功能还应当与其使用场景有关。
以上定义框架中,应用场景和作战功能是所有武器系统使用时的客观环境和作战要求,而关键特征则是对LAWS特有内涵的描述。下面对这些关键特征进行分析。
2.2.1 关键自主功能
关键自主功能是界定LAWS的关键特征。在研究LAWS定义时,详细分析武器系统与作战相关的功能,结合情景分析关键功能是由人实施、人控制下机器实施还是机器自主实施,是给出LAWS定义的有效途径,这需要首先明确关键自主功能的类型。对于关键自主功能的划分基本有2种观点:一种认为只有选择人类作为攻击目标以及决定是否进行攻击属于关键自主功能,这种观点占据主流,根据已公开的政策,美国、英国以及ICRC组织等偏向这一观点。在2015年7月以霍金等为代表起草,并得到全球数千名科学家和学者签名的禁止“攻击性自动武器”的公开信中,也把无须人类命令便能够选择并攻击目标的人工智能武器,与无人机和巡航导弹等人类选择打击目标的自动武器有所区别[19]。另一种观点认为,与作战相关的功能都属于要考虑的范围,如法国、日本、加拿大等国家和Article 36的定义偏向这一观点,根据这种观点,LAWS不仅需要具备第一种观点中的选择和攻击能力,而且应当具备如自主导航、搜索、补给、修复等通用功能。
2.2.2 自主程度
自主程度也是LAWS的关键特征,它和关键自主功能构成了自主性这一概念。目前对自主性开展研究较多的是美国,为了对自主性的定义进行规范,美国国家标准研究院(National Institute of Standards and Technology,NIST)整合了多个部门和领域的需求,成立了无人系统自主级别框架工作组(Autonomy Levels For Unmanned Systems,ALFUS),并给出了他们对自主性的定义[20]:自主性是无人系统自我管理水平和自我管理质量的量度;是无人系统在预定任务目标实现过程中感知、理解、分析、交流、规划及决策制定与执行的能力。美国认为,决定武器系统自主程度的因素包括:武器系统执行任务的能力;武器系统遭遇故障和敌方黑客攻击时的抵抗能力;武器系统进行决策时参考人类决策的设计;武器系统在使用时遵守国际法的能力[21]。
除了上述较抽象的定义,有不同组织分别给出了对自主程度进行比较和评估的分级方法。如ALFUS分级标准将无人系统自主程度划分为0~10级,0级表示无自主性,即100%由人工控制的程度,第10级表征各种极端环境条件、高复杂度任务、趋近于无人工干预的完全自主程度,从第0级到第10级反映了无人系统自主性从“人工遥控”到“完全自主”的渐进差别[22]。美国空军AFRL(Air Force Research Laboratory)的项目组提出了ACL(Autonomous Control Levels)分级方法,将自主程度分为10个等级,主要作为无人机系统自主程度的衡量标准[23-25]。美国国家航空宇航局(National Aeronautics and Space Administration,NASA)飞行器系统计划提出的NASA Smart分级方法,主要从系统与操作人员的交互出发,根据操作人员的干预程度进行级别划分,共分为8个等级,从系统不参与任何辅助任务执行、完全由操作者完成,到系统和操作人员共同执行操作,系统的任务执行级别不断提高,其最高级别第8级为系统独立执行任务[26]。美国陆军科学委员会(Army Science Board,ASB)提出的自主性分级方法,主要用于地面无人系统的自主性等级描述。共分为10个等级,从自主性最低的第1级到最高的第10级,其中第1级为“人工远程控制”,第10级为“执行战场任务时达到甚至超过人类的完全自主功能”[27]。
LAWS属于军事领域概念,其自主程度关键在于战场环境中的表现。在上述分级方法中,ALFUS方案描述较为细致,但并非面向作战环境;ACL分级方法由军方提出,直接面向军事作战领域;NASA Smart和ASB分级方法均面向任务执行描述自主性,因此也可用于描述作战任务。但ACL、NASA Smart和ASB分级方法对自主性分级的描述比较抽象和模糊,应用其对武器的自主能力级别进行定量评估还比较困难,可作为研究LAWS自主性特性和分级的基础。
2.2.3 人机关系
人机关系是LAWS定义中的关键特性。参加联合国CCW会议的德国代表就提出,LAWS的定义应该首先明确LAWS所需要的最低程度的来自人类的控制[28]。美国在其政策性指令中也提出[3]7,自主武器系统必须允许人类对机器做出的决策进行“适当水平的干预(appropriate levels of human judgment)”,自主和半自主武器系统“必须设计为在发挥效力时,允许指挥人员或者操作人员行使适当层级的判断”。指令要求相关人员必须起到监督作用,并能够在必要时激活或者解除系统功能[3]3。然而机器系统反应迅速,人类在此过程中可能无法实施及时有效干预。Article 36组织认为应当用“有意义”的人为控制来描述LAWS系统中的人机关系,“有意义”的人为控制包括:(1) 采用可预测、可靠和明确的技术;(2) 人类对执行行动的后果、技术和使用环境的明确了解;(3) 人类及时的判断和行动,以及能够及时阻止的能力;(4) 能够根据某种标准进行追责[15]3,4。
界定人机关系无疑是定义LAWS的重要方面,无论是“有意义的人为控制”或者“适当水平的人类决策”,还是人类控制等,都需要结合情境阐述其具体含义,回答“有意义”的具体含义,“人为控制”和“人类决策”具体指什么。
2.2.4 与自动化关系
自动化是与自主性密切相关的概念。区分自动化和自主性,有助于确定LAWS的范畴。ICRC的代表曾在2013年联合国CCW会议上阐述过自动化武器与遥控武器的概念[2],认为自动化武器以自足完备和独立的方式运行,在设定好的可控环境中严格执行预编程行动或序列,其攻击目标、攻击决策以及攻击方式都是由人类预先设定的,例如自动岗哨炮、自动地雷以及舰船和陆地上使用的自动防御系统。遥控武器一般由战区之外的操作员控制进行战斗,可以被固定在一处(如美军在阿富汗尝试过的遥控炮台),也可以自行移动(如无人机)。这类武器一般而言自动化程度非常高,但本质上只是扩展了传统武器的作战范围。而自主性武器一个显著的不同是,在某些关键性的能力(如决定人类的生命)方面,机器可能给出并执行自己的决策,而不是按照人类预先设定好的程序或者人类远程的遥控来执行。
自主性与自动化密切相关。一方面,具有自主性的武器系统应当具有自动化的功能才能形成自主作战能力;另一方面,自主性起步于自动化,但是在本质上有别于自动化。目前普遍认为,学习能力是自主智能系统相比一般自动化系统的重要差别。但是,学习能力本身又是个模糊概念,自动化的武器系统也可根据环境变化从可能的方式中进行选择,这也可被视为一种学习能力。因此如何区分自主系统和自动化系统的学习能力,需要结合情景进行阐述。
2.3 基于定义框架对LAWS定义的讨论
基于图1所示的框架,可以对美国DoDD 3000.09给出的自主武器系统定义进行分析,从关键特征维度来看:
1) 关键自主功能:根据DoDD 3000.09文件,只有是否选择人类作为攻击目标以及决定是否进行攻击属于关键自主功能;
2) 自主程度:根据定义表述来看,该定义需要武器系统达到ALFUS分级标准9级以上的自主级别;
3) 人机关系:该定义中,武器系统需要激活,在激活之后便完全无须人类干预(但是仍需保证人类对其可控);
4) 与自动化关系:定义中未加表述,在默认情况下,自主武器需要具备自动化能力。
从作战功能维度来看,定义中仅表述了选择目标与交战这2个要素,未明确在完整战斗步骤中各个环节的自主性,仅大致可映射到定义框架中的识别、决策和武力打击。
从应用场景来看,美国在DoDD 3000.09其他部分的说明中对攻击和防御场景进行了区分,但是没有明确指出在战术环境、电磁环境、自然环境下的应用情况。
根据定义框架,美国目前给出的定义主要强调了人机关系,其他方面要素要么需要根据相关文件内容推测,要么则完全没有涉及。类似地可以分析其他已有定义,如加拿大代表给出的定义中涉及了应用场景维度中的自然环境、战术环境,关键特征维度中的关键自主功能和作战功能维度中的识别等要素。可以看出,目前各国已给出的定义方案要素均可包括在定义框架中,但由于缺乏统一的标准,目前的表述较模糊且不完整,相互间也难以对比。根据定义框架对定义进行扩充后可以就同一要素进行对比,从而有助于形成对定义的统一认识。
3 结 束 语
联合国框架下关于致命性自主武器系统的讨论在举行了3次非政府专家会议基础上,2017年可能会进入政府专家组会议阶段,并开始讨论相关军控问题。为促成国际社会关于致命性自主武器系统定义问题的统一认识,各国需要采用一致的定义方式从而能够形成对比和讨论。提出情境和内涵特征相结合的定义框架,有助于各国就致命性自主武器系统在应用场景、作战功能和关键特征多个维度充分阐述定义。
References)
[1]Human Rights Watch.Losing humanity:the case against killer robots[EB/OL].(2012-11-19)[2016-11-16].https://www.hrw.org/report/2012/11/19/losing-humanity/case-against-killer-robots.
[2]ICRC.Fully autonomous weapon systems[EB/OL].(2013-11-25)[2016-11-16].https://www.icrc.org/eng/resources/documents/statement/2013/09-03-autonomous-weapons.htm.
[3]Department of Defense.Autonomy in weapons systems[EB/OL].(2012-11-21)[2016-11-16].https://www.dtic.mil/whs/directives/corres/pdf/300009p.pdf.
[4]Foreign & Commonwealth Office.United Kingdom of Great Britain and Northern Ireland Statement to the informal meeting of experts on lethal autonomous weapons systems[EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/49456EB7B5AC3769 C1257F920057D1FE/MYMfile/2016_LAWS+MX_GeneralExchange_Statements_United+Kingdom.pdf.
[5]France Country Paper.Non paper mapping of technological developments [EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/B9E3E 8041CE4D326C1257F8F005A31E2/MYMfile/2016_LAWSMX_CountryPaper_France+MappingofTechnicalDevelopments+EN.pdf.
[6]Japan Country Paper.Japan’s views on issues relating to LAWS [EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/4E8371EAD5E 34263C1257F8C00289B5E/MYMfile/2016_LAWS+MX_CountryPaper+Japan.pdf.
[7]Canada Country Paper.Canadian food for thought paper:mapping autonomy [EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/C3EFCE5F7BA8613BC1257F8500439B9F/MYMfile/2016_LAWS+MX_CountryPaper+Canada+FFTP1.pdf.
[8]Switzerland Country Paper.Towards a "compliance-based" approach to LAWS [EB/OL].(2016-03-30)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/D2D66A9C427958D6C1257F8700415473/MYMfile/2016_LAWS+MX_CountryPaper+Switzerland.pdf.
[9]Sierra Leone Country Paper.Opening statement by ambassador Yvette Stevens [EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/0054AE2FAA24E566C1257F9B004A2CAB/MYMfile/SIER RA+LEONE+GENERAL+STATEMENT+2016+MEETING+ON+LAWS.pdf.
[10]Pakistan Country Paper.Statement by ambassador Tehmina Janjua [EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/D6F11030CC 982C11C1257F93005933A0/MYMfile/2016_LAWS+MX_GeneralExchange_Statements_Pakistan.pdf.
[11]Costa Rica Country Paper.Statement of the delegation of Costa Rica [EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/5DF8EE 2B9B3C881BC1257F920057A83B/MYMfile/2016_LAWS+MX_GeneralExchange_Statements_Costa+Rica.pdf.
[12]Maya Yaron.Statement on lethal autonomous weapons systems [EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/A02C15B2E 5B49AA1C1257F9B0029C454/MYMfile/2016_LAWS_MX_GeneralDebate_Statements_Israel.pdf.
[13]Turkey Country Paper.Statement by Turkey[EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/D3C97CBA51D5EF62C 1257F9400422F29/MYMfile/2016_LAWS+MX_GeneralExchange_Statements_Turkey.pdf.
[14]ICRC.Views of the International Committee of the Red Cross (ICRC) on autonomous weapon system [EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/B3834B2C62344053C 1257F9400491826/MYMfile/2016_LAWS+MX_CountryPaper_ICRC.pdf.
[15]MOYES R.CCW comments [EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/07E97E9D93027C78C1257F9B004F532B/MYMfile/2016_LAWS+MX_presentations_towardsaworkingdefinition_moyesnotes.pdf.
[16]GOOSE S.General exchange of views [EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006 B8954/(httpAssets)/252007F8C3EB3E1EC 1257FAE002 F4DE5/MYMfile/HRW+intervention+Goose+12+April+2016.pdf.
[17]Campaign to stop killer robots.Country policy positions[EB/OL].(2015-03-25)[2016-11-16].http://www.stopkillerrobots.org/wp-content/uploads/2015/03/KRC_CCWexperts_Countries_25Mar2015.pdf.
[18]Wikipedia.定义[EB/OL].(2016-03-22)[2016-11-16].https://zh.wikipedia.org/zh-hans/定义.
[19]Future of Life Insititute.Autonomous weapons:an open letter from ai & robotics researchers[EB/OL].(2015-07-28)[2016-11-16].http://futureoflife.org/open-letter-autonomous-weapons/.
[20]HUANG H M,ALBUS J,MESSINA E,et al.Specifying autonomy levels for unmanned systems:interim report[C]//Proceedings of SPIE Unmanned Ground Vehicle Technology VI.Orlando:the International Society for Optical Engineering,2004:386-397.
[21]ICRC.Autonomous weapon systems technical,military,legal and humanitarian aspects [EB/OL].(2014-03-26)[2016-11-16].https://www.icrc.org/en/download/file/1707/4221-002-autonomous-weapons-systems-full-report.pdf.
[22] HUANG H M,MESSINA E,ALBUS J.Autonomy levels for unmanned systems (ALFUS) framework volume ii:framework models version 1.0 [EB/OL].(2007-12-01)[2017-03-30].http://www.nist.gov/customcf/get_pdf.cfm?pub_id=823618.
[23]Office of the Secretary of Defense.Unmanned aerial vehicles roadmap 2000—2025 [EB/OL].(2001-04-01)[2016-11-16].http://handle.dtic.mil/100.2/ADA391358.
[24]Office of the Secretary of Defense.Unmanned aerial vehicles roadmap 2002—2027[EB/OL].(2002-12-01)[2016-11-16].http:// handle.dtic.mil/100.2/ADA414908.
[25]Office of the Secretary of Defense.Unmanned Aircraft Systems Roadmap 2005—2030 [EB/OL].(2005-08-04)[2016-11-16].http:// handle.dtic.mil/100.2/ADA445081.
[26]LARRY A Y,JEFFREY A Y,Mark D G.System analysis applied to autonomy:application to high-altitude long-endurance remotely operated aircraft[C]//Proceedings of the AIAA Information and Technology of Aerospace Conference.Arlington:AIAA,2005:1-32.
[27]ARMY SCIENCE BOARD.AD hoc study on human robot interface issues[EB/OL].(2002-09-01)[2017-03-30].http://handle.dtic.mil/100.2/ADA411834.
[28]German Country Paper.German general statement [EB/OL].(2016-04-11)[2016-11-16].http://www.unog.ch/80256EDD006B8954/(httpAssets)/1A10EE8317A92AA4C 1257F9A00447F2E/MYMfile/2016_LAWS+MX_Towardaworkingdefinition_Statements_Germany.pdf.
(编辑:李江涛)
Research on the Definition Method of Lethal Autonomous Weapons Systems
CAO Huayang, KUANG Xiaohui, LI Xiang, ZHAO Gang
(National key Laboratory of Science and Technology on Information System Security, Beijing Institute of System Engineering, Beijing 100101, China)
Lethal autonomous weapons systems attract the attention of international societies, and give rise to debates on corresponding arms control. However, due to the lack of a standard definition method, there is not a unified understanding of the definition of lethal autonomous weapons systems, the prerequisite of arms control, among countries. In light of this, the existing definitions of lethal autonomous weapons systems are summarized in this paper. Through research and analysis of definition methods, a definition framework of lethal autonomous weapons systems, composed of application situations and key features, is proposed. Based on this framework, the concept of lethal autonomous weapons systems can be defined from the three dimensions of key features, application situations and the role played in battlefield, and the existing definition can also be analyzed.
autonomous weapons; smart weapons; automatic weapons; unmanned weapons; definition framework
2017-02-20
部委级资助项目
曹华阳(1984—),男,助理研究员,博士,主要研究方向为网络空间安全、人工智能。caohuayangwork@163.com
E920
2095-3828(2017)03-0038-07
A DOI 10.3783/j.issn.2095-3828.2017.03.007