变电站巡检机器人激光建图系统设计
2017-07-19王振祥李建祥
王振祥,李建祥,肖 鹏
(1.中交机电工程局有限公司,北京 100088;2.山东鲁能智能技术有限公司,山东 济南 250101)
变电站巡检机器人激光建图系统设计
王振祥1,李建祥2,肖 鹏2
(1.中交机电工程局有限公司,北京 100088;2.山东鲁能智能技术有限公司,山东 济南 250101)
基于环境地图的机器人导航系统已经得到了越来越多的应用,针对传统变电站巡检机器人导航方式存在的不足,设计了变电站巡检机器人激光建图系统。首先介绍了系统的组成结构,之后着重对地图创建算法进行了详细描述,并搭建了原型系统。最后,为验证系统性能,在500 kV变电站现场对系统功能进行了测试。测试结果表明,所设计系统可以成功建立变电站现场环境电子地图,同时所建地图也与现场环境具有较好的一致性。
变电站;巡检;机器人;激光;导航
0 引言
传统的变电站巡检机器人导航系统一般采用磁轨迹引导外加射频识别(Radio Frequency Identification,RFID)标签辅助定位方式实现[1-2],该导航方式具有可靠性好、抗干扰能力强并具备较高的重复定位精度,非常适合执行站内设备例行巡检任务,但利用这种导航方式需要在机器人运行路线上铺设磁条和设定RFID标签,施工的工作量较大。
为解决这一问题,其他的一些导航方式(如:卫星导航、视觉导航、惯性导航等)已被引入巡检机器人并在变电站现场进行了测试,通过对公开资料的对比,激光导航表现出了良好的定位精度和对室外变电站环境具有较好适应性,文献[3-5]介绍了一种基于人工路标的变电站巡检机器人激光导航系统,由于其导航需要按照一定要求在环境中安置人工路标,路标安置和调整的工作量较大,一般不适用于变电站较大范围的机器人导航运行。
本文详细描述了一种基于激光点云匹配的激光建图系统的设计过程,同时通过变电站现场测试,验证了所设计系统的地图创建性能。
1 系统结构
随着自主建图技术尤其是同时定位与建图(Simultaneous Localization and Map Building,SLAM)技术的不断成熟,基于环境地图的机器人导航系统已经得到了越来越多的应用[6]。在这类系统中,如何获取正确且精确的环境地图是系统中其他功能(定位、路径规划、避障等)实现的基础。本文所设计激光建图系统结构如图1所示,系统依据功能又划分为感知和处理两层结构。
感知层主要包含系统中数据采集硬件设备。在这一层中,一台德国生产的室外型二维激光传感器被用来探测机器人周边环境特征。另外,安装于机器人两侧驱动电机末端的光电编码器脉冲也被采集,用于后续对机器人位姿(位置和姿态,下同)的估计。
处理层主要包含测距数据预处理、航位推算和数据融合3个模块,这3个模块构成了激光建图系统的软件核心。激光传感器输出测距数据首先通过数据预处理模块,滤除数据中的粗大误差数据,数据融合模块则将其与航位推算得到的机器人位姿估计数据进行融合,从而完成机器人运行环境地图创建。
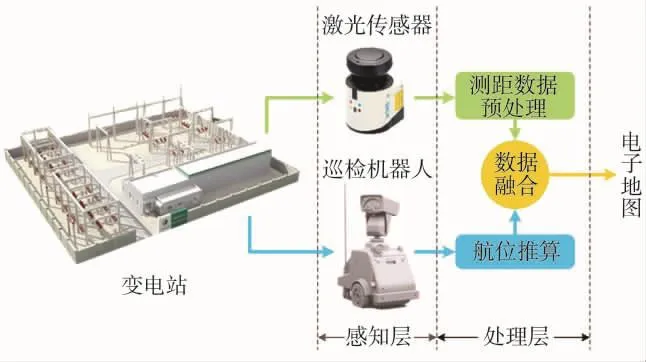
图1 系统结构
2 算法设计
变电站内部环境通常为准结构化的,设备区内不仅有设备较为密集的区域,也有相对空旷且被植被覆盖的区域,为保证对站内所有区域的电子地图创建能力,采用基于激光测距数据的电子地图创建方法。
2.1 测距数据预处理
激光传感器是巡检机器人地图创建及定位导航系统的核心设备,主要负责探测机器人周边环境中物体相对于传感器中心的距离,然而在其与外部环境交互过程中,外部环境中各种因素必然会直接或间接施加于传感器本身,进而影响传感器的实际测距性能。
针对在室外应用过程中,激光传感器输出数据包含了比较多的环境噪声及异常值,为保证后续激光建图定位算法性能,有必要对获得的原始激光测距数据进行处理,抑制环境噪声对系统精度的影响。激光传感器测距数据的预处理流程如图2所示。

图2 激光数据预处理流程
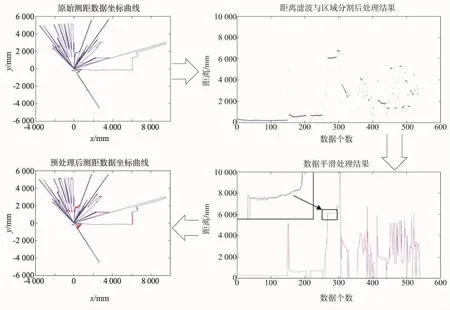
图3 测距数据预处理中间过程和处理结果
图2中,距离滤波用于滤除因环境内空旷区域或传感器表面灰尘造成的极值数据;区域分割则通过判别相邻测距数据间的差值是否超出设定阈值,将传感器检测到同一物体上的数据进行聚类,以便剔除位于远近不同物体间的错误扫描点,即传感器混叠数据;数据平滑则通过对数据的进一步处理,抑制数据中存在的波动,从而保证后续地图创建精度。对现场采集的一帧激光测距数据的预处理中间过程及结果如图3所示。
2.2 航位推算
为了实现后续地图创建,需要利用数据融合技术对机器人位姿估计值与观测值进行融合实现,机器人位姿观测值可由后续激光数据匹配得到,而机器人位姿的估计值则需要在分析机器人运动几何结构基础上,由机器人航位推算模型得到。所述巡检机器人为一典型差速运动方式,机器人运动部分几何简化结构如图4所示。
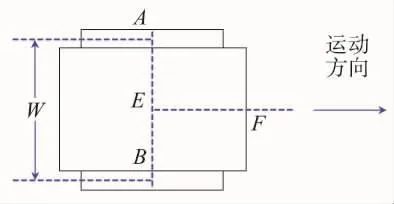
图4 机器人几何结构简化模型
图4中,两轮轮轴中心分别为A和B,连线AB长度为W;点E位于AB连线中点,并定义该点为机器人运动中心,通过该点可定义机器人在工作环境中的位置,而机器人运动方向则可由机器人纵向轴线EF的确定,图中箭头方向表示为机器人平台的朝向。全局坐标系下的航位推算模型为
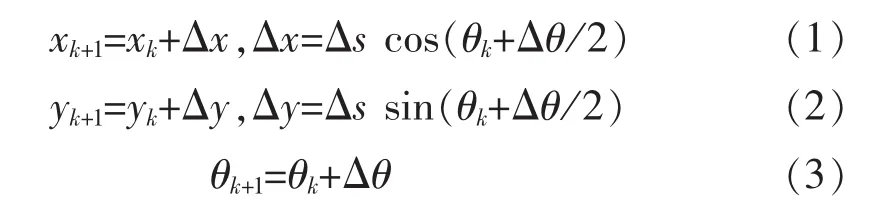
式中:Δs、Δθ分别为单位时间内机器人的移动距离和转过角度,其值则可由左、右轮转动弧长ΔsR、ΔsL以及两轮中心距W计算得到,为

式中:ΔR和ΔL为单位时间内两轮编码器脉冲变化量;C为转换系数;D为驱动轮直径;N为减速比;M为电机每转输出脉冲数;εR和εL为单位时间内两轮转动距离误差。
2.3 数据融合
SLAM方法被Smith等人提出后,这一研究方向目前已经成为机器人研究领域的热点之一,从概率方法到图优化方法在内的众多创新性的方法被提出并应用。为了实现对激光建图系统的快速搭建,本文数据融合部分采用了扩展卡尔曼滤波(Extended Kalman Filter,EKF)框架实现[7-8],完整的激光建图过程如图5所示。
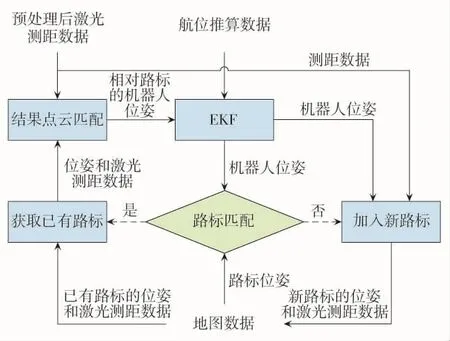
图5 激光建图过程
图5中,地图数据由一系列激光路标组成,每一个路标又包含了其在加入地图时的全局坐标系位姿以及预处理后的激光测距数据。扩展卡尔曼滤波模块通过融合航位推算数据和由激光点云匹配得到的机器人相对位姿数据以得到全局坐标系下的机器人位姿。
激光点云匹配部分采用了迭代最近点(Iterative Closest Point,ICP)算法[9],其通过两点集间最近点迭代运算,求取其相对位姿变化。此处,该算法用于估计机器人当前位姿与第n个路标之间得相对位姿(Δxn,Δyn,Δθn),而机器人当前位姿(xk+1,yk+1,θk+1)与路标位姿(xn,yn,θn)之间的关系为
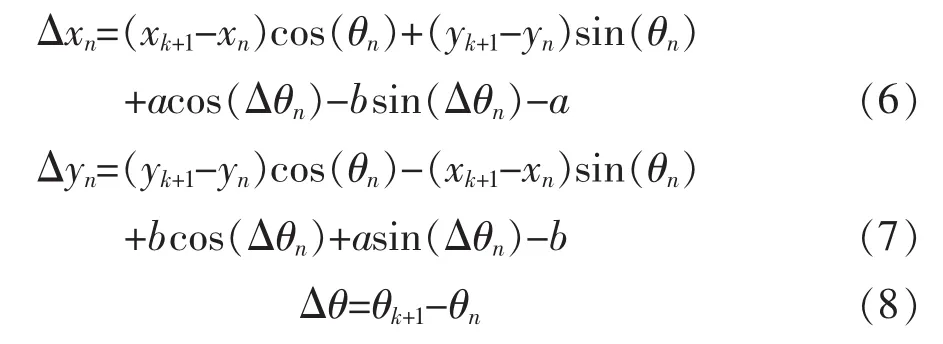
式中:a、b分别为激光传感器相对于机器人运动中心的横向和纵向距离。
在地图创建过程中,路标匹配负责在地图数据中寻找距离机器人当前位姿最近距离的路标,如果找到其就将获取到已有路标数据发送至激光点云匹配部分,否则就把机器人当前位姿与激光测距数据作为路标数据加入当前地图,从而实现增量式地图创建。
当第n个路标被加入地图时,扩展卡尔曼滤波器中的状态向量和协方差矩阵为
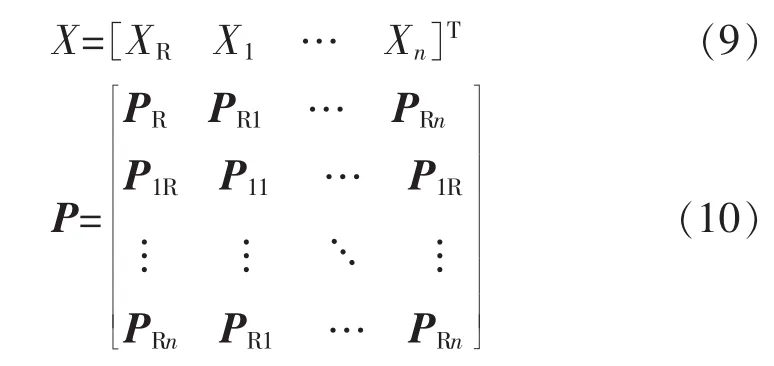
式中:XR和Xn分别为机器人和第n个路标的位姿;P为系统协方差矩阵;PR为机器人本体位姿协方差子矩阵;PRn则为机器人位姿与第n个路标位姿的协方差子矩阵;PnR为PRn的转置矩阵。依据式(1)~(5),系统误差传递协方差矩阵如式(11)所示,其中A为状态误差传递矩阵,B为控制误差传递矩阵。

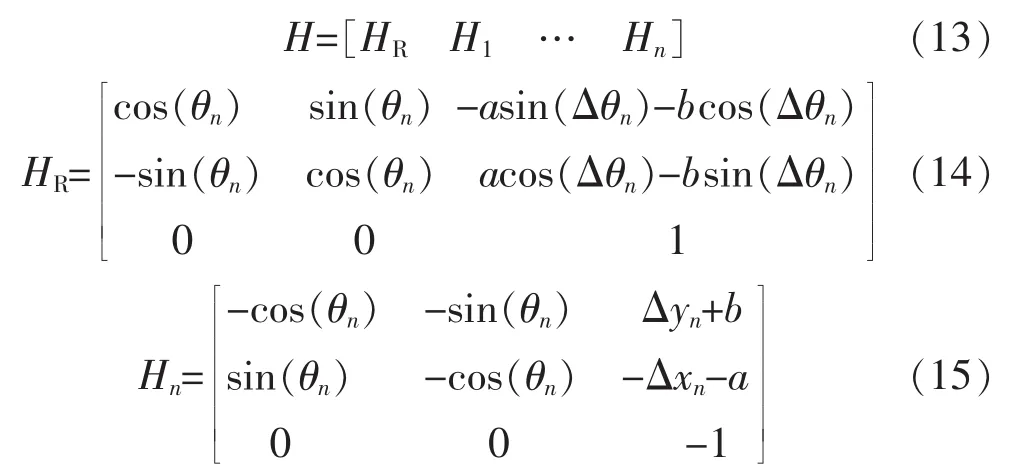
对于卡尔曼滤波过程中所需观测向量协方差矩阵则可从式(6)~(8)得到,如式(12)~(14)所示,其中:HR和Hn分别用于更新机器人状态和第n个路标的位姿。
3 系统测试
在算法设计基础上,搭建激光建图原型系统,如图6所示。该系统与现有巡检机器人具有相同的差速运动方式,并在其上安装了激光传感器及相关数据采集处理设备。为了测试上述建图算法在现场环境下的建图效果,原型系统在一500 kV室外变电站进行了现场测试,该变电站的卫星俯瞰图如图7所示。
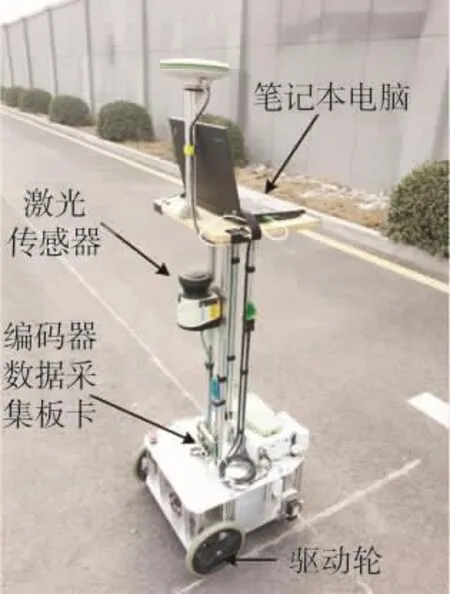
图6 激光建图原型系统

图7 变电站的卫星俯瞰图
为了使测试能更好地贴近机器人实际巡检运行要求,在站内选择两个比较有代表性的子区域Ⅰ、Ⅱ,如图7所示。其中区域Ⅰ位于站内主变后方的电缆沟盖板上,区域Ⅱ为设备区内的一条正常巡检路线。
对区域Ⅰ进行测试得到结果如图8所示。图8(a)为由所设计建图定位系统得到的测试区域电子地图及测试运行轨迹,图8(b)为仅依靠航位推算数据建立的该区域电子地图,图8(c)为本测试区域内比较有代表性的几个场景。
图8中,测试从A点处电缆沟盖板开始,经过B点,此处前方为一相对空旷区域,然后在E点所处区域转向约90°,整个测试终止于F点所处区域。整个建图定位运行距离约为150m。在图8(b)中,由于受到电缆沟盖板上接缝处地面起伏影响,所建立地图中环境特征混叠现象明显,同时运行轨迹偏转明显,运行轨迹的几何形状与该区实际情况偏差较大。而由所设计的激光建图与定位算法得到的图8(a)则较好地反映了测试区域内的环境特点,同时得到的运行轨迹几何形状与机器人实际运行情况一致。
区域Ⅱ测试运行距离约250m,由图9可知,经过建图定位算法生成的电子地图,同样较好地反映了该区域内的环境特征。
4 结语
介绍了变电站巡检机器人激光建图系统的设计过程,介绍了其系统组成结构,着重对建图过程中涉及的核心算法进行了详细描述,并搭建了激光建图原型系统。通过变电站现场测试,所设计系统可以成功建立现场环境电子地图,同时所建地图也与变电站现场环境具有较好的一致性。最后需要说明,目前本系统只在变电站内小范围内进行测试,后续还需对如何创建变电站全区域电子地图等问题做进一步研究。
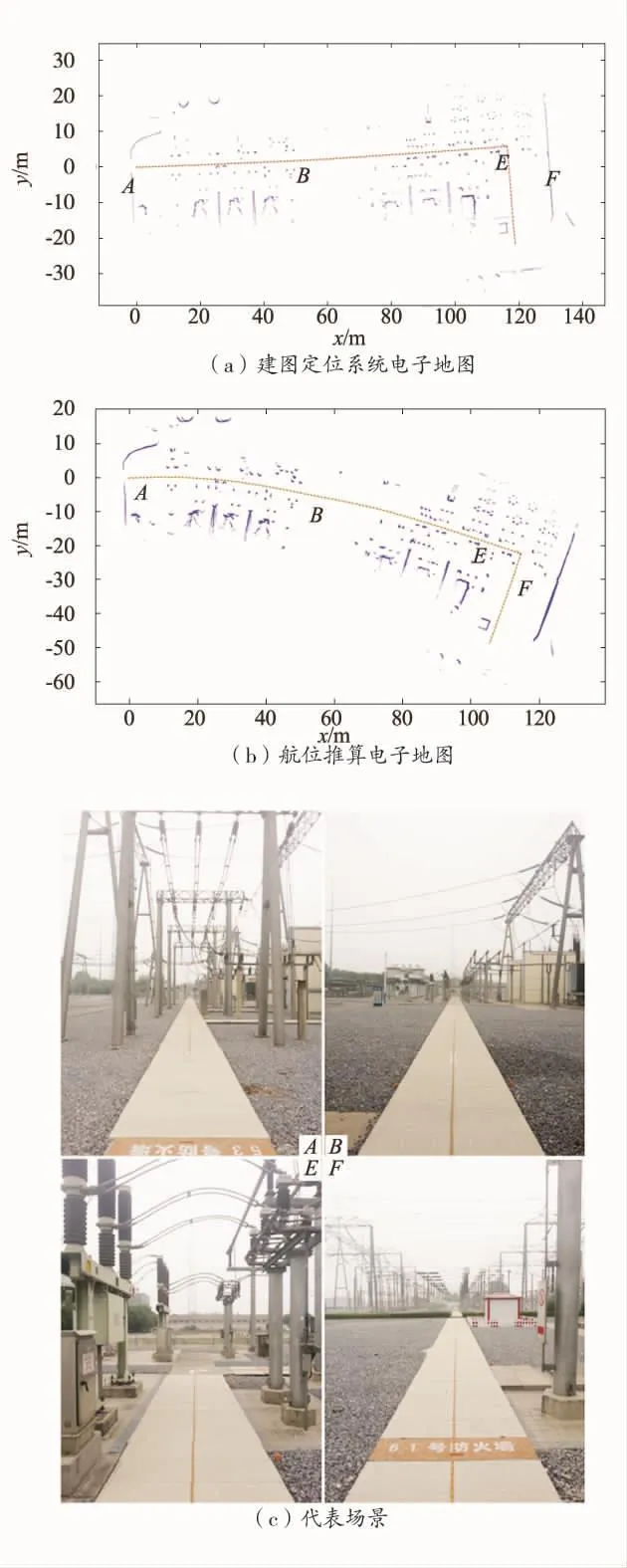
图8 区域I测试结果
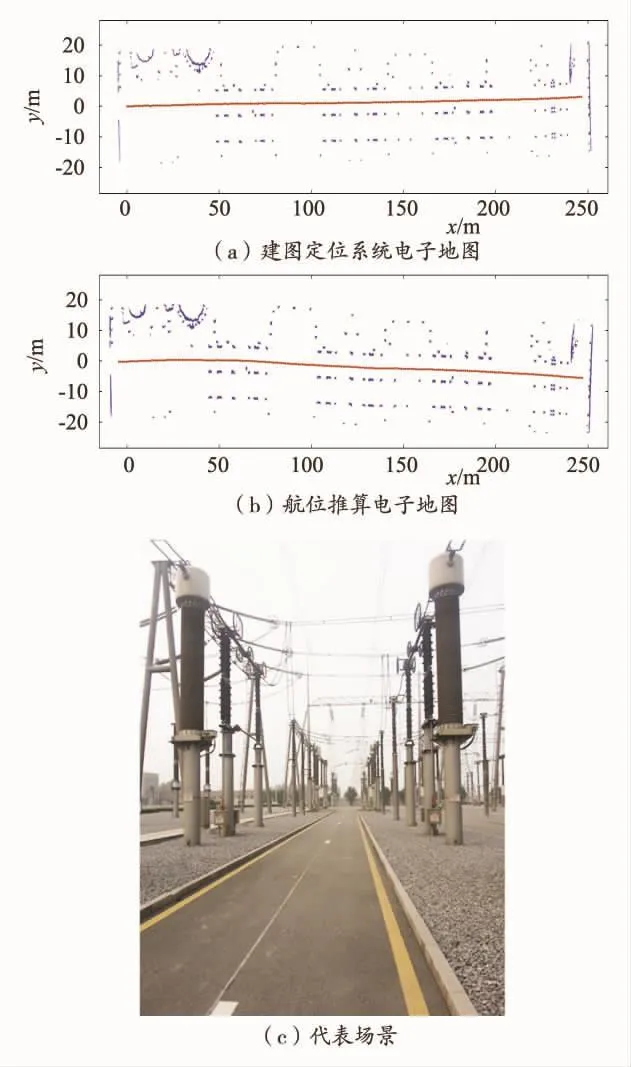
图9 区域II测试结果
[1]GUORui,HAN Lei,SUN Yong,et al.A Mobile Robot for Inspection of Substation Equipments[C]//Proc.2010 1 st International Conf.on Applied Robotics for the Power Industry,pp.1-5.
[2]GUORui,LIBingqiang,SUN Yutian,et al.A Patrol Robot for Electric Power Substation[C]//Proc.2009 IEEE International Conf.on Mechatronics and Automation,pp.55-59.
[3]XIAOPeng,GUORui,LUAN Yiqing,et al.Design of a Laser Navigation System for Substation Inspection Robot[C]//2013 10 th IEEE International Conference on Control and Automation,pp.739-743.
[4]LIShengfang,HOUXingzhe.Research on the AGVBased Robot System Used in Substation Inspection[C]//Proc.2006 Interna tionalConf.on Power System Technology,pp.1-4.
[5]肖鹏,栾贻青,郭锐,等.变电站智能巡检机器人激光导航系统研究[J].自动化与仪表,2012(5):5-9.
[6]SIEGWARTR,NOURBAKHSH IR,and SCARAMUZZA D. Introduction to Autonomous Mobile Robots[M].2 nd ed. Cambridge:The MIT Press,2011.
[7]WELCH G,BISHOPG.An Introduction to the Kalman Filter[EB/OL].Available:http://www.cs.unc.edu/~welch/media/ pdf/kalman_intro.pdf.
[8]CHOSET H,LYNCH K,HUTCHINSON S,et al.Principles of RobotMotion[M].Cambridge:The MIT Press,2005.
[9]BESL P J,MCKAY N D.A Method for Registration of 3-D Shapes[M].IEEE Computer Society,1992.
Design of a Laser M apping System for Substation Inspection Robot
WANG Zhenxiang1,LIJianxiang2,XIAO Peng2
(1.CCCCMechanical&Electrical Engineering Co.,Ltd.,Beijing 100088,C hina;2.Shandong Luneng Intelligence Technology Co.,Ltd.,Jinan 250101,C hina)
More and more navigation systems based on themap of the environment have becomemature enough to be used in practical application.To overcome some defects of the classical navigation system used by the substation inspection robot now,a laser mapping system is designed and hoped to help the robot to fulfill the navigation tasks in the future application.The structure of the system is presents firstly,and then the algorithms formapping are described in detail.Finally a prototype system is constructed,and an experimental test is carried out in a 500 kV outdoor substation to verify the performance of the system. The experimental results show that the laser mapping system designed can build the map successfully,and the outputmap correctly represents the actual feature of the substation environment.
substation;inspection;robot;laser;navigation
TP242;TM63
A
1007-9904(2017)06-0017-05
2017-03-28
王振祥(1977),男,高级工程师,主要从事智能变电站工程设计等方向的研究工作。
