高速列车动态系统鲁棒故障诊断滤波器设计
2017-07-19白卫齐董海荣姚秀明
白卫齐,董海荣,姚秀明,林 雪
(1.北京交通大学 轨道交通控制与安全国家重点实验室 北京 100044;2.北京交通大学 电子信息工程学院, 北京 100044)
高速列车动态系统鲁棒故障诊断滤波器设计
白卫齐1,董海荣1,姚秀明2,林 雪1
(1.北京交通大学 轨道交通控制与安全国家重点实验室 北京 100044;2.北京交通大学 电子信息工程学院, 北京 100044)
针对高速列车动态系统研究了鲁棒故障诊断滤波器的设计问题。首先,通过引入多质点力学模型刻画了高速列车动态特性,并将线性化过程中产生的高阶项以及由轨道曲线阻力、坡度以及隧道阻力造成的非线性不确定阻力建模为具有特定方向性特征的外界干扰。 其次,将高速列车常发的牵引系统故障、传感器组故障以及车体结构故障归结为两类故障模型,通过建立两类故障的等价关系,在故障诊断滤波器设计过程中将本文考虑的三种故障统一化为类执行器故障进行处理。最后,针对高速列车动态系统多质点模型,基于几何方法通过系统左特征向量配置设计鲁棒故障诊断滤波器,并进行了数值仿真,仿真结果验证了本故障诊断滤波器设计方法的有效性。
高速列车;故障诊断;特征向量配置
近年来高速铁路获得了快速发展,在铁路客运中的占有比例越来越高,成为一种运行速度高、运输能力大、生态环保的公共交通方式,作为攸关旅客生命及财产安全的大型地面运输系统,高速铁路的运行安全至关重要,而在高速列车运行与维护过程中安全性与可靠性是两个必须考虑的关键因素。由于高速列车运行速度高、运行周期长、内部复杂电磁环境以及外部多变的运行环境等特点,在运行过程中不可避免的会出现部件故障,甚至发生损坏导致系统失效。高速列车运行过程中发生的故障或安全隐患若不能快速诊断并得到有效处理,将导致灾难性后果并造成无可估量的经济损失乃至巨大的人员伤亡,作为提高系统运行可靠性、降低系统运行风险的重要方法,现代故障诊断技术的发展为提高高速列车运行过程中的可靠性与安全性提供了可能。
随着现代大型工业生产对可靠性、安全性要求的提高,故障诊断技术近年来在理论和实践中受到了越来越多关注,大量成果得到发表[3-8]。故障诊断方法主要分为基于模型的故障诊断方法和基于数据的故障诊断方法。前者利用系统的模型和输入输出数据,通过设计解析冗余,利用原系统输入输出与解析模型输入输出之间的差别,实现故障的检测和分离。在基于模型的故障诊断方法中,基于鲁棒残差生成器的故障诊断方法得到了广泛研究,该方法的基本思路是设计一组残差使得残差,对外界干扰鲁棒,而对故障敏感Yao等[9]通过引入故障参考模型将鲁棒故障检测滤波器设计问题转化为了标准的H∞优化问题,通过优化H∞范数保证残差对干扰的鲁棒性及对故障的敏感性。Liu和Wang等[10-11]提出利用广义H-指标表示在整个频域残差对故障的最差敏感性,通过优化残差对故障的H-指标与残差对干扰的H∞范数设计了基于多目标优化方法的H-/H∞故障检测观测器。Kabore等[4]与Massoumnia等[3]研究了基于几何方法的故障检测滤波器设计方法,通过将故障配置到一系列独立的检测子空间实现故障的检测与隔离。
本研究针对高速列车多质点动态模型,将列车可能发生的牵引机构故障、车钩故障及列车传感器故障统一建模,利用动态系统左特征向量配置方法实现故障检测空间配置,通过将干扰限制在相应残差不可观子空间实现鲁棒故障检测与隔离。此方法针对特定数量故障可以利用最少数量故障检测滤波器实现故障检测与隔离。

图1 高速列车受力分析图Fig.1 The force diagram of the HST
1 问题描述
1.1 高速列车动力学模型
考虑一辆主要受到轮轨阻力和空气阻力作用含有节车厢的高速列车,如图1示。其中mi、vi、xi分别表示第i节车的质量、速度及第i节车厢与第i1节车厢的相对距离;牵引力、机械阻力及空气阻力分别表示为ui、Rmi、Ra,车厢之间的车钩力表示为fk(x),因此,高速列车动态特性可以描述如下:
(1)
公式中机械阻力Rmi,空气阻力Ra,车钩力fk(x)分别为:

(2)
其中:c0,cv,ca为Davis方程系数,k为车钩刚性系数。

(3)


(4)
其中:Ed为干扰分布矩阵输出矩阵,C为单位矩阵,A,Bu,Ex为系数矩阵,如下所示:

(5)

(6)

(7)

(8)
1.2 故障建模
根据高速列车运行过程中故障可能发生部位,将故障模型分为两种类型。
1.2.1 执行器故障模型
故障发生于高速列车牵引系统执行器输入部位,即故障信号耦合于动态系统输入信号u(t)。此时,故障与输入矩阵Bu相应列矢量具有共同方向特性不失一般性,假设故障信号发生在系统第ith输入通道,则此种故障模式下列车的动态特性可以描述为:
(9)
其中:Bu,i表示输入矩阵Bu第ith列,μi(t)为有界时变标量函数。
列车机械部件由于性能劣化导致动态特性发生变化(例如:高速列车第ith节车厢与第ith+1车厢之间车钩动态特性发生变化,实质上反映为列车动态模型中参数k偏离正常值),故障方向矢量可以从系统矩阵A中导出同样不失一般性,假设系统发生结构故障,列车动态系统可以表述为:

(10)
其中:ΔAP表示矩阵A第pth列参数变化,xp(t)表示状态矢量x(t)第pth行。
从以上分析过程可以很明显看出,当故障发生在执行器输入或者系统发生结构故障时,可以将故障统一建模为执行器故障模型。
1.2.2 传感器故障模型
故障发生在采集列车输出状态的传感器时,故障信号可以描述为动态系统输出方程内的加性项:
y(t)=Cx(t)+Esμs。
(11)
其中Es为传感器故障分布矩阵,定义了传感器故障的方向特性,μs为未知有界时变函数。
引理1 针对式(4)所示系统,发生如式(11)所示传感器故障时可以等价转换为执行器故障如下所示:

(12)

证明 以上引理在后续故障诊断滤波器设计过程中具有重要作用,因此在这里给出以上引理的证明过程,不失一般性考虑如下传感器故障下线性时不变系统

(13)
引入Luenberger状态观测器,且定义残差如下:

(14)

(15)
由以上分析可知,式(11)所示传感器故障可以等价转化为引理所示执行器故障。
2 故障检测滤波器设计
针对式(4)高速列车多质点模型,考虑发生执行器故障、传感器故障,则由上述分析可得故障模式下列车动态系统描述如下:

(16)
本节将针对式(16)设计鲁棒故障检测滤波器,使残差对系统外界干扰信号及线性化过程中产生高阶项具有鲁棒性,对故障信号具有敏感性,同时保证能够通过分析残差信号的幅值与方向特性,对故障进行检测和隔离。
针对式(16)设计如下Luenberger观测器:

(17)
(18)


(19)

通过设计参数矩阵K使ri只对故障信号Fiμi敏感,对干扰信号及其它故障信号鲁棒。

定义:针对误差动态系统(19),故障检测与隔离问题可以归结为寻找输出调节矩阵K,使系统存在一系列检测子空间Ti⊆E,i=1,2,…,q,如下条件成立:

(20)
利用动态系统左特征向量配置方法来设计系统输出反馈矩阵K、输出调节矩阵K,设计算法描述如下:

(21)
其中:CFi=0,CAFi=0,…,CAki-1Fi=0,CAkiFi≠0,vik是与不变零点zik相对应的不变零向量,定义如下:

(22)
Step 2 定义q+p+1个补故障:

(23)

Step 3 求解方程:

(24)


(25)
Step 4 故障检测滤波器输出调节矩阵K:

(26)

(27)
注:从设计算法可以看出,本方法是通过将干扰信号以及故障信号配置到各自检测子空间,通过设置投影矩阵进行故障隔离及干扰解耦;因此,所提故障诊断滤波器设计方法要求所涉及故障信号和干扰信号几何可解耦。

表1 高速列车动态系统参数Tab.1 The parameters of the HST
3 仿真验证
针对高速列车执行器故障、传感器故障、车钩故障设计了基于几何方法的鲁棒故障检测滤波器,仿真验证了故障检测滤波器设计方法的有效性。仿真参数如表1所示。


(28)
故障方向矩阵Fi定义为:



(29)
根据中算法1,故障诊断滤波器输出调节矩阵K可求解如下:

(30)
为了验证所提故障诊断滤波器设计方法的有效性,设计三种故障模式(即:列车牵引电机故障、车钩故障、列车速度传感器故障)进行仿真验证。本文中列车牵引电机故障模式设定为牵引电机输出功率的变化,表现为模型执行器实际输入信号偏离参考值;车钩故障设定为车钩刚性系数k实际值偏离理论值;速度传感器故障设定为列车速度测量项出现加性项。仿真场景设计如下:
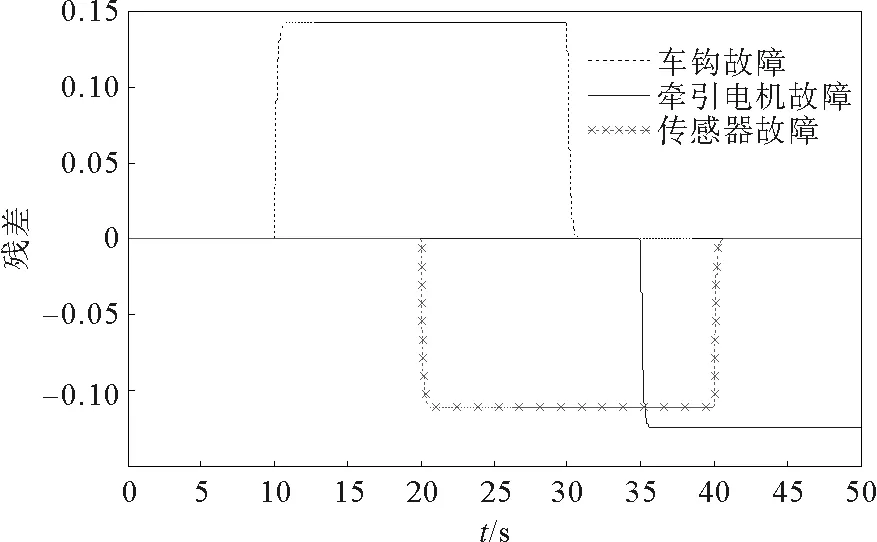
图2 执行器故障、车钩故障、传感器 故障故障检测与隔离结果Fig.2 Result of fault detection and isolation of three faults: actuator fault, coupler fault, sensor fault
车钩故障F1从10 s 由0变为1,持续到20 s; 执行器故障从20 s 由0变为1,持续20 s;感器故障从35 s由0变为1,仿真过程中干扰信号设定为功率谱密度为3的白噪声。
(31)
从仿真结果图2可以看出,在0到10 s没有故障发生,残差γ1、γ2、γ3幅值接近零,验证了所设计故障诊断滤波器对外界干扰的鲁棒特性;10 s到20 s、30 s到35 s、40 s到50 s三个时间段只有一条残差曲线不为零,此时只有一种故障发生,与故障发生的实际结果相符;同样可以判断出从20 s到40 s有多重故障发生,从仿真结果可以明确判断发生故障的类型。
4 结语
针对高速列车动态系统,将系统三种常见故障进行归类建模。引入故障诊断滤波器设计过程中,传感器故障模型与执行器故障模型的等价关系;将系统线性化高阶误差项及难以建模隧道阻力、曲线阻力、风阻引起的外界干扰当作一种故障模式,与系统中故障模式统一考虑。利用动态系统左特征向量配置方法,借助高速列车动态系统故障方向及干扰方向之间的差异,将故障信号及干扰信号限制在独立状态子空间,从而达到干扰解耦及故障隔离的目的。给出了故障诊断滤波器的设计步骤及输出调节矩阵的计算方法。 最后,仿真验证了鲁棒故障诊断滤波器设计算法的有效性。
[1]ZHUAN X,XIA X.Fault-tolerant control of heavy-haul trains[J].Vehicle System Dynamics,2010,40(12):1016-1021.
[2]WEI X K,JIA L M,LIU H.A comparative study on fault detection methods of rail vehicle suspension systems based on acceleration measurements[J].Vehicle System Dynamics,2013,51(5):700-720.
[3]MASSOUMNIA M A,VERGHESE G C,WILLSKY A S.Failure detection and identification[J].IEEE Transactions on Automatic Control,1989,34(3):316-321.
[4]KABORE P,HAMMOURI H,KINNAERT M.A geometric approach to fault detection and isolation for bilinear systems:application to heat exchangers[C]//Fault Detection,Supervision and Safety for Technical Processes:SAFEPROCESS 2000.Pergamon,2000:244-249.
[5]DOUGLAS R K,SPEYER J L.Robust fault detection filter design[C]//American Control Conference,Proceedings of the IEEE,2012,19(1):91-96.
[6]GUZINSKI J,DIGUET M,KRZEMINSKI Z,et al.Application of speed and load torque observers in high-speed train drive for diagnostic purposes[J].IEEE Transactions on Industrial Electronics,2009,56(1):248-256.
[7]FRANK P M.Fault diagnosis in dynamic systems using analytical and knowledge-based redundancy:A survey and some new results[J].Automatica,1990,26(3):459-474.
[8]ISERMANN R.Model-based fault-detection and diagnosis-status and applications[J].Annual Reviews in Control,2005,29(1):71-85.
[9]YAO X,WU L,ZHENG W X.Fault detection filter design for Markovian jump singular systems with intermittent measurements[J].IEEE Transactions on Signal Processing,2011,59(7):3099-3109.
[10]LIU J,WANG J L,YANG G H.An LMI approach to minimum sensitivity analysis with application to fault detection[J].Automatica,2005,41(11):1995-2004.
[11]WANG J L,YANG G H,LIU J.An LMI approach toH-index and mixedH-/H∞fault detection observer design[J].Automatica,2007,43(9):1656-1665.
[12]WHITE J,SPEYER J.Detection filter design:Spectral theory and algorithms[J].IEEE Transactions on Automatic Control,1987,32(7):593-603.
(责任编辑:李 磊)
Robust Fault Diagnosis Filter Design for the Dynamics of High Speed Train
BAI Weiqi1, DONG Hairong1, YAO Xiuming2, LIN Xue1
(1. State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, Beijing 100044,China;2. School of Electronic and Information Engineering, Beijing Jiaotong University, Beijing 100044,China)
Abstract: The fault diagnosis filter design problem of high speed train was systematically studied in this paper. First, a multi-particle model was introduced to describe the dynamics of the high speed train. The high order nonlinear terms generated in the linearization procedure and the complex nonlinear uncertainty terms generated by curve resistance, slop resistance and tunnel resistance were modeled as a series of directional exogenous disturbance. Then, the faults frequently occurring to the high speed train including hauling system fault, sensor set fault and body structure fault were categorized into two types of models. By constructing the equivalent relations of the two types of faults, the three kinds of faults were treated as a unified class executor fault in the design of fault diagnosis filter. Finally, based on the dynamic multi-particle model of the high speed train, a robust fault diagnosis filter was designed through the left eigenvector assignment on the basis of geometric method. A numerical simulation was conducted and the results verified the effectiveness of the proposed fault diagnosis filter.
high speed train; fault diagnosis; eigenvector assignment
2017-04-06
国家自然科学基金项目(61322307,61490705);中央高校基本科研基金(2015RC51)
白卫齐(1990—),男,河南驻马店人,博士研究生,主要从事鲁棒故障诊断方面研究. E-mail:14111050@bjtu.edu.cn 董海荣(1974—),女,河南驻马店人,教授,博士生导师,主要从事智能交通系统、列车自动驾驶、轨道交通平行控制与管理系统、复杂控制系统的稳定性和鲁棒性研究,本文通信作者. E-mail:hrdong@bjtu.edu.cn
U266
A
1672-3767(2017)04-0038-07
10.16452/j.cnki.sdkjzk.2017.04.006
