一类不确定性系统的局部化边界在线近似控制
2017-07-19王琦
王 琦
(河南财政金融学院 现代教育技术中心,河南 郑州 451464)
一类不确定性系统的局部化边界在线近似控制
王 琦
(河南财政金融学院 现代教育技术中心,河南 郑州 451464)
针对非线性控制方法在含不确定性的非线性系统跟踪控制方面存在的计算量大、结构复杂、稳定性证明困难等问题,提出了一种新的局部化边界在线近似控制方法。设计了近似函数在线近似非线性系统的未知不确定性,将不确定性的影响进行量化,并引入控制系统加以抑制。同时设计了固有误差的近似函数,以确定固有近似误差上界,消除固有近似误差影响。通过数值仿真算例,证明了所提控制方法具有优异的全局稳定性和快速性,特别是跟踪误差精度的量级可达到10-3。
在线近似;局部化边界;非线性系统;不确定;控制
0 引言
线性比例-积分-微分(proportion-integration-differentiation,PID)控制是目前广泛应用的控制方法[1]。但是线性PID控制在处理非线性系统的控制问题时,存在全工作域内稳定性证明困难、增益调度工作量大等缺陷,特别是在含不确定性的非线性系统的控制方面缺陷更为突出。
针对含不确定性的非线性系统的跟踪控制问题,众多学者试图通过非线性控制的思路解决。文献[2]采用精确的系统辨识方法,但是该方法辨识过程复杂、计算量巨大,且对时变不确定性的辨识效果较差。文献[3-5]采用滑模控制方法来降低不确定性对系统控制精确性和稳定性的影响。但是这些方法为处理滑模控制诱发的抖振现象,引入自适应、自调整等处理结构,这不但大大增加了系统结构的复杂性,而且抑制抖振效果也不好。文献[6-7]分别采用神经网络、模糊控制等智能控制方法对不确定性进行估计,目的是将不确定性的影响量化,并引入控制系统加以抑制。但是这些方法的稳定性缺乏严格证明,且计算量随系统复杂度的增加而急剧增大,实际应用中计算机处理能力很难实现实时处理。文献[8-9]利用自适应控制方法对不确定性进行在线估计,将不确定性的影响量化,引入控制系统加以抑制。但是自适应方法需要已知系统机构信息,仅能处理参数不确定性,对模型结构的不确定性则无能为力。
综上所述,目前的非线性控制方法在含不确定性的非线性系统跟踪控制方面均存在计算量大、结构复杂、对模型结构的不确定性处理困难的问题。基于此,本文针对一类带结构不确定性的非线性系统,提出了一种局部化边界在线近似控制方法。该方法采用近似器函数在线近似系统结构不确定性,引入以系统工作点为自变量且带局部化作用的参数自适应律,使近似器近似精度随时间不断提高,并降低近似器计算量。通过数值仿真算例证明所提出控制方法的有效性。
1 问题描述
考虑以下一阶单输入单输出(single input single output,SISO)系统:

(1)
其中:f0(x)为已知系统部分;f(x)为未知系统部分,即由参数摄动、高频未建模等导致的系统不确定性。


(2)

(3)
(4)

2 在线近似控制律设计
定义如下的f(x)线性参数近似器为:

(5)

定义f(x)的理论最优近似器为:

(6)


(7)


(8)
其中:δ(x)为近似器可以获得的最小近似误差,

(9)
定义在线近似参数误差为:
(10)
则式(8)可表示为:

(11)
选择控制输入u为:

(12)
其中:β用于处理固有近似误差δ(x),下文给出定义。将式(12)代入系统(1)可得系统跟踪误差为:

(13)
由于δ(x)表示对于未知函数f(x)的近似器的固有近似误差,δ(x)及其上界也是未知的。因此,假设下式成立:

(14)

3 局部化参数自适应律设计


(15)

(16)

在此条件下,β可选择为:

(17)

4 稳定性分析
引理1[10]当常数η满足η=e-(η-1),即η=0.278 5时,对于任意ε>0和任意u∈R,以下不等式恒成立:

(18)
选择李雅普诺夫函数为:

(19)

(20)
其中:Q=diag(Φ(x))。式(20)中第2项和第3项展开分别为:

(21)

(22)
因此,式(20)可变换为:

(23)

(24)

(25)
5 数值仿真算例
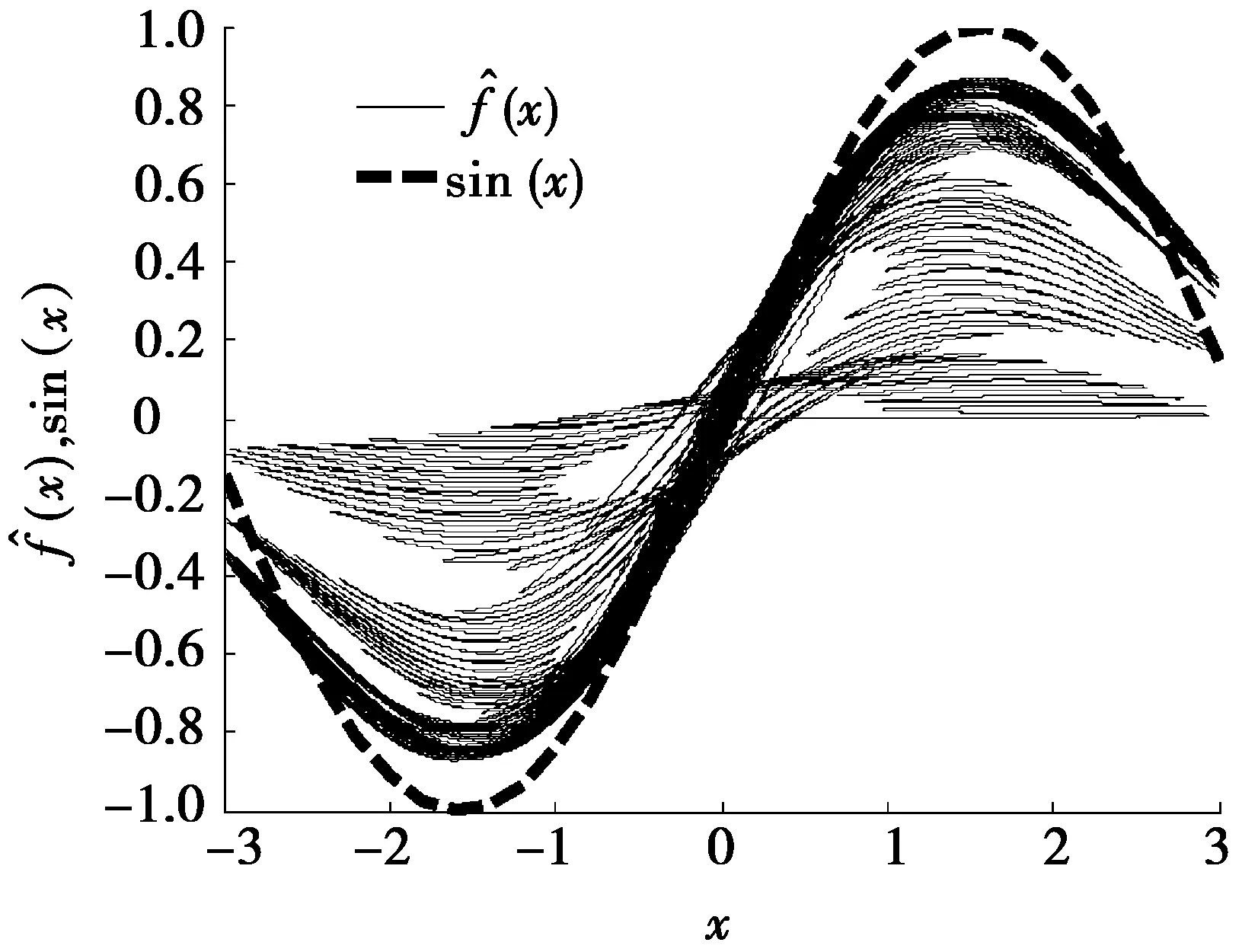
为验证所提出的控制器设计方法,考虑如下的控制对象:

(26)
其中:假设f(x)=sin(x)为未知部分。系统工作域指定为D=[-3.5,3.5]。基函数矢量采用固定中心和宽度的高斯径向基函数。高斯径向基函数的中心在-3.6到3.6之间每隔0.3均匀分布。控制增益k=0.3。期望的跟踪轨迹由如下动力系统的输出给出:

(27)

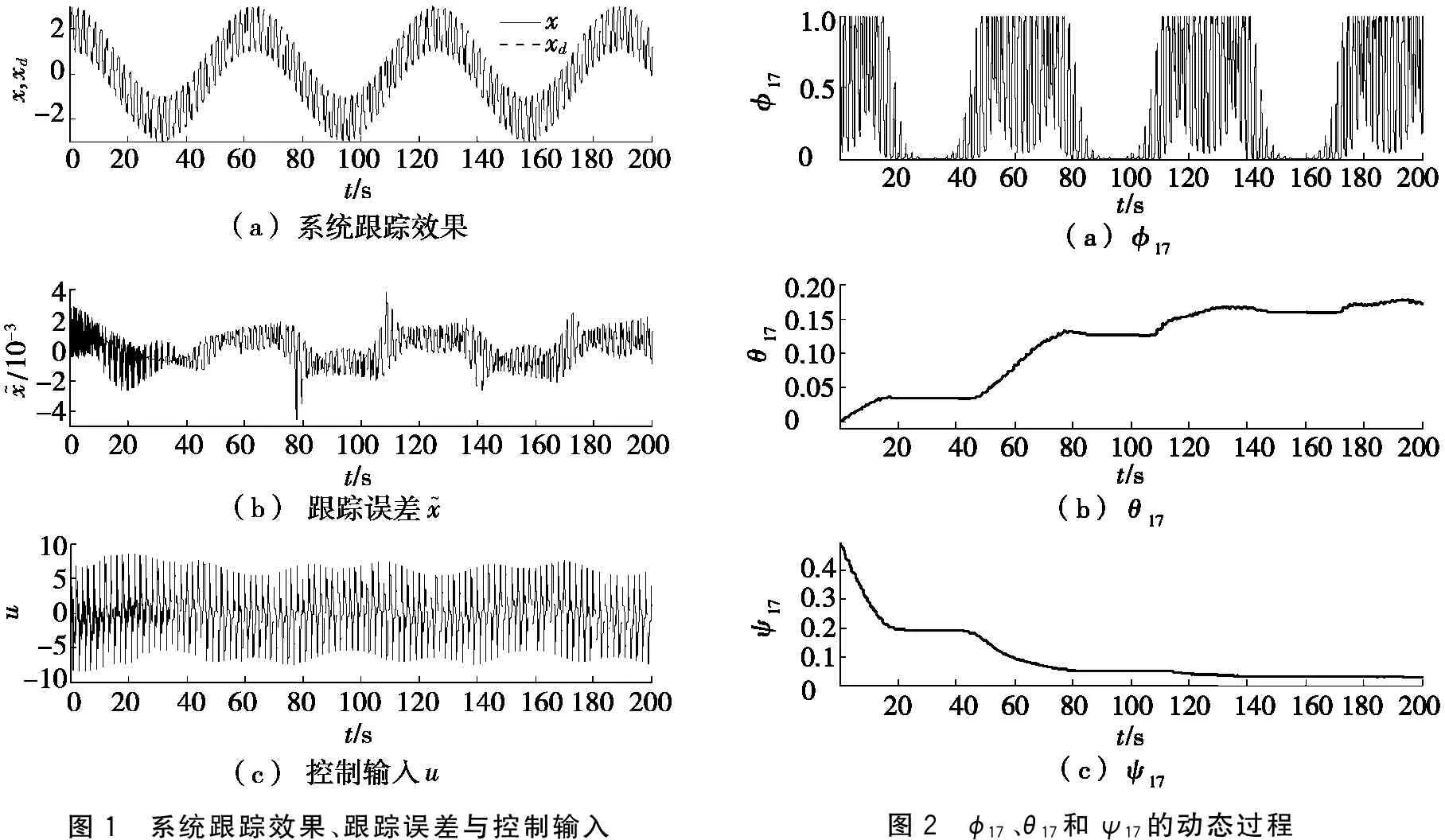
图1 系统跟踪效果、跟踪误差与控制输入图2 ϕ17、θ17和ψ17的动态过程
由图1a可知:尽管施加了高频变化的跟踪指令,系统的跟踪稳定性、快速性、精确性均十分优异。由图1b可知:整个控制过程中系统跟踪误差都保持在10-3的量级。由图1c可知:得益于平滑项式(17)的作用,控制输入u始终保持了稳定平滑有界,未出现抖振现象。输入u的高频变化只是为适应跟踪指令的高频变化。

图动态过程

综上可知,采用所提出的控制律(式(12)、式(15)~式(17))能够确保被控系统(式(25))所有状态量稳定有界,且达到较高的跟踪精度。
6 结束语

[1] POUNDS P E I,DOLLAR A M.Stability of helicopters in compliant contact under PD-PID control[J].IEEE transactions on robotics,2014,30(6):1472-1486.
[2] 石先城,冯郁成,陈克复.基于改进RLM算法的横向控制过程的系统辨识[J]. 华南理工大学学报(自然科学版),2016,44(5):58-65.
[3] 蒋沅,曾令武,代冀阳.一类非线性直升机模型的滑模降阶控制器设计[J].控制理论与应用,2013,30(3):330-338.
[4] WANG H T,DONG X M,XUE J P,et al.Dynamic modeling of hose-drogue aerial refueling system and integral sliding mode backstepping control for whipping phenomenon[J].Chinese journal of aeronautics,2014,27(4):930-946.
[5] 杨晓骞,李健,董毅.非线性不确定性系统的非奇异快速终端滑模控制[J].控制理论与应用,2016,33(6):772-778.
[6] 王一光,李晓杰,陈兴林.基于永磁直线同步电机的光刻机掩模台鲁棒自适应神经网络控制[J].电工技术学报,2016,31(6):38-46.
[7] 王守相,陈思佳.一种智能配电网三相调压器的模糊控制方法[J].电力系统自动化,2016,40(1):72-80.
[8] PRAKASH R,ANITA R F.Robust model reference adaptive intelligent control[J].International journal of control,automation and systems,2012,10(2):396-406.
[9] 齐晓慧,甄红涛,董海瑞.基于观测器的不确定非线性系统L1自适应控制[J].系统工程与电子技术,2015,37(8):1866-1873.
[10]ZHAOY,FARRELJA,POLYCARPOUMM.Localizedadaptiveboundsforonlineapproximationbasedcontrol[C].2004AmericanControlConference.Boston:2004.
国家杰出青年科学基金项目(61525301)
王琦 (1982-),女,河南新乡人,实验师,硕士,主要研究方向为计算机应用与仿真等.
2017-04-13
1672-6871(2017)06-0044-05
10.15926/j.cnki.issn1672-6871.2017.06.009
TP273
A
